基于LabVIEW的ARPA跟蹤算法仿真系統實現?
2018-02-07 05:45:18楊瑞容鄭振宇
艦船電子工程 2018年1期
關鍵詞:模型
楊瑞容 鄭振宇
(1.海軍大連艦艇學院學員旅 大連 116018)(2.海軍大連艦艇學院航海系 大連 116018)
1 引言
自動雷達標繪儀(Automatic Radar Plotting Aid,ARPA)是一種把雷達技術與計算機應用結合在一起的船舶避碰設備,可連續自動提供需要的航行及避碰信息數據,并對航行態勢進行評估。AR?PA系統核心算法為目標跟蹤算法,其主要目標是建立目標運動軌跡,以提醒指揮員危險目標的運動狀態,在跟蹤過程中,需要采用有效的濾波算法來消除觀測噪聲的影響,目前,主流的航海雷達ARPA跟蹤算法多都采用α-β濾波及各種改進算法[1]。LabVIEW是一種實驗室虛擬儀器集成開發平臺,其采用圖形化編程語言(G語言),具有編程可視化,界面美觀化、開發模塊化等特點,是用來開發仿真系統的平臺[2]。本文基于LabVIEW開發了一套ARPA跟蹤算法仿真系統,并應用經典α-β濾波算法與改進算法進行仿真分析,具有較強的工程應用價值。
2 LabVIEW平臺下ARPA算法的實現
2.1 基本設計思路
ARPA采用邊掃描邊跟蹤的方式,雷達記錄下目標在屏幕上位置隨掃描更新的變化,建立目標的運動軌跡方程,即完成了目標跟蹤過程。跟蹤器采用跟蹤波門按照設定的濾波算法,隨著天線旋轉掃描,在波門內部檢測到目標的存在,記錄下目標位置,驅動波門預測目標運動軌跡。波門采用可變波門,即分為大、中、小三種。在LabVIEW平臺下通過定時控件按照艦船運動模型輸出經緯度序列,添加雜波干擾濾除技術模擬生成目標運動序列數據。采用α-β濾波算法建立目標的預測跟蹤,根據預測目標與實測目標的距離獲得預測誤差,根據預測誤差的大小來確定波門大小,若采用大波門連續5次未錄取到目標,則視為目標丟失,發出報警信號。
2.2 功能模塊
程序功能模塊主要包括艦船目標運動模型、α-β濾波器、波門設計、態勢顯示以及其它輔助功能設計。
1)艦船目標運動模型
該模型是通過定時輸出一組二維數據來模擬目標的位置。采用LabVIEW公式節點控件建立運動模型,輸入目標的初始位置、初始航向、初始航速的參數,并且建立雜波仿真模型,模擬雜波對雷達造成的觀測誤差,通過定時控件和移位寄存器等時間間隔輸出目標的實時位置,運動模型參數如表1所示。

表1 勻速目標運動模型輸入數據參數信息
2)α-β濾波器
通過在LabVIEW平臺內嵌Matlab腳本文件節點實現α-β濾波器算法功能。Matlab腳本節點可提高運算效率,并且可通過改變在腳本節點內需要輸入的具體執行語句就能轉換為其它類型的濾波器,從而實現濾波器的轉換功能。
3)波門設計
波門設計在本程序中的主要思路是通過讀取跟蹤目標下一時刻的預測位置,然后以該位置為波門的中心,根據上一時刻跟蹤目標的實測位置與預測位置的距離差來確定波門寬度,實現跟蹤系統當中反饋環節的功能。本文設計的波門有圓形波門和方形波門,并且將波門分為大、中、小三種,若目標的預測誤差超過10m,則采用大波門,若預測誤差在5m~10m之間或前25個采樣點均使用中波門,若預測誤差小于5m,則采用小波門。
4)態勢顯示
圖1為合并信號控件圖示與態勢顯示的程序框圖。
通過合并信號控件將目標的實測軌跡、預測軌跡、平滑軌跡以及波門都同時顯示在XY圖上。由于目標的運動是實時更新的,因此為了使目標能一直直觀地顯示在XY圖上,并能看出目標之前一段時間的航跡,增強軟件的實用性,該程序對其的設計是,對于前二十個采樣點,即從目標開始錄取的前20s,XY圖的顯示區域的經度范圍為E121°~E121.0005°,緯度范圍為 N38°~N38.0005°,之后XY圖的顯示區域是為以波門中心設為(j,w)位置為中心,則經度的顯示范圍為E(j-0.00025)°~E(w+0.00025)°,緯度的顯示范圍為 N(w-0.00025)°~N(w+0.00025)°。
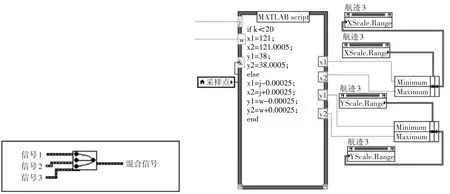
圖1 合并信號控件圖示與態勢顯示程序框圖
5)其它輔助功能
本程序中的輔助功能主要是給ARPA系統添加報警功能,通過設計一個變量p,初值為0,當采用大波門而未錄取到目標時(即預測誤差大于波門寬度時),p值加1,若下一時刻采用大波門仍未錄取到目標,則p值再加1,否則p值清零。當p值為5時(即采用大波門連續5次未錄取到目標),輸出報警信號q,值為5,此時p值清零。最后通過布爾控件在前面板上顯示為紅燈報警。
3 α-β濾波算法仿真分析
在對α-β濾波算法進行仿真測試時(選用圓形波門),以目標的起始位置為坐標原點建立平面直角坐標系,對目標的初始運動參數進行設定。根據船用雷達設備推薦性能標準,采用雷達對目標進行距離測量時,其誤差不超過所用量程的1.5%或70m,取其最大者[3]。濾波器真正起作用的是從第3個采樣點開始的,因此對誤差的統計從第3個點開始。
3.1 常增益α-β濾波算法
常增益α-β濾波算法中有最優選擇法、穩態卡爾曼增益選擇法、卡爾曼增益選擇法、臨界阻尼選擇法和最佳阻尼增益選擇法,本文選取最優選擇法進行仿真。
α 的 值 分 別 取 0.1、0.3、0.5、0.7、0.9,根 據可得相應的β值。其仿真效果如圖2所示,目標預測位置誤差的統計如表2所示。

圖2 采用最優選擇法目標的實測位置與預測位置示意圖
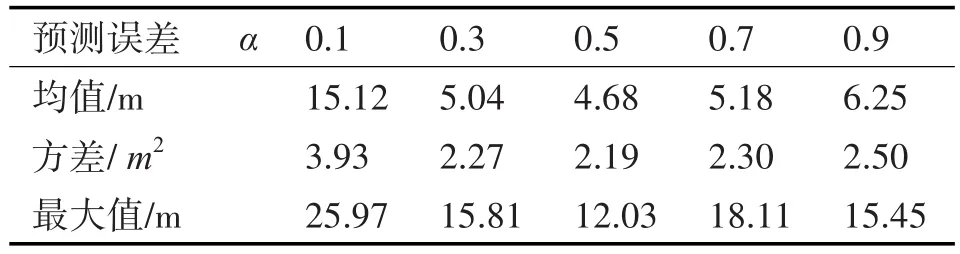
表2 采用最優選擇法目標預測位置誤差的統計性能
由表2可得出,若α,β的取值越大,跟蹤系統的閉環帶寬值越大,因此在目標跟蹤的初始階段,系統可以較快地跟蹤上目標,但是濾波器的濾波效果差;若α,β的取值越小,跟蹤系統的閉環帶寬越窄,因此在目標跟蹤的初始階段,目標預測位置的誤差大,容易跟蹤目標失敗,但是其穩定階段濾波器的濾波效果好。因此對于常增益α-β濾波器,α,β的取值要適中,一般α的取值為0.5較為合適。
3.2 自適應α-β濾波算法
在工程中,常用的自適應濾波算法就是將α,β的值與濾波器的采樣序列的數(即本文當中的k值)相關聯,從而達到自適應的效果。一種常用的自適應α-β濾波算法,其α,β的取值為

目標預測位置誤差的統計性能如表3所示。

表3 采用自適應α-β濾波算法目標預測位置誤差的統計性能
由表3可看出,自適應α-β濾波算法明顯優于常增益α-β濾波算法,其既能在系統跟蹤目標的初始階段能夠快速地跟蹤上目標,且整個跟蹤過程濾波器的濾波性能較好。
3.3 α-β濾波算法的局限性
α-β濾波算法只適用于勻速運動目標模型,一旦目標突然發生機動,α-β濾波算法的濾波性能將會大大下降,以下分別從兩種情況考慮目標發生機動對α-β濾波算法的影響,其中采用常增益α-β濾波算法當中的最優選擇法(α=0.5,β=0.17)和自適應α-β濾波算法對其進行仿真與分析。
1)變向目標運動模型
采用α-β濾波算法對變向目標運動模型進行仿真時,其目標的輸入參數數據如表1所示,其中采樣次數取100,設目標在第50個采樣時突然向右打舵,舵角為5°,在第55個采樣點時回舵,并利用Matlab畫出其預測誤差分布圖,如圖3所示。

圖3 對于變向目標運動模型采用自適應濾波法目標的預測誤差分布圖
由圖3可知,對于變向目標運動模型,采用自適濾波器的濾波性能明顯變差。因為自適應濾波器跟蹤目標進入穩定階段后,α,β的值都趨近于0,一旦目標發生轉向,目標的預測位置偏離實測位置越來越遠,從而使誤差越來越大。
2)變速目標運動模型
采用α-β濾波算法對變速目標運動模型進行仿真時,其目標的輸入參數數據如表1所示,設做勻速運動的目標在第50個采樣點時加速度為1節·s-2,到第65個采樣點時加速度為-1節·s-2,到第80個采樣點時加速度為0。利用Matlab畫出其預測誤差分布圖,如圖4所示。

圖4 對于變速目標運動模型采用自適應濾波法目標的預測誤差分布圖
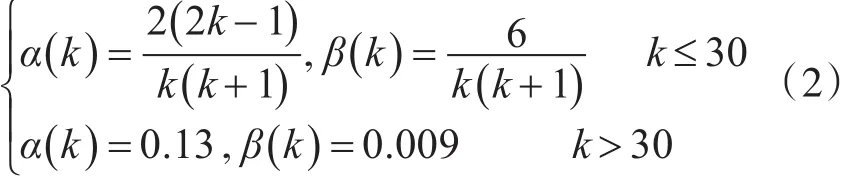
根據上述對自適應α-β濾波器的仿真,可得出當系統跟蹤目標進入穩定階段后,若目標發生機動,其濾波器的濾波性能就開始變差,且預測誤差越來越大。最主要歸因于式(1)中 α(k),β(k)的取值方法,隨著采樣序列的增加,α,β的值都趨近于0,跟蹤系統的帶寬變得太小,目標一發生機動,濾波器就會丟失目標,因此對該濾波算法進行改進。
我們對自適應α-β濾波器的α,β賦予限定條件,隨著采樣序列的增加,α,β的值不會趨近于0,而是到達一個最小值,使系統保證有足夠的帶寬,這樣在目標跟蹤的穩定階段,就算目標發生機動,目標跟蹤算法也不會發散。當采樣序列k≤30時,α(k),β(k)的取值與式(1)一致,當采樣序列k>30時,α(k )給一個定值,取0.13,β(k)的值根據得,β(k)=0.009,具體表示如下:
由圖4可得,對于變速目標運動模型,自適濾波器的濾波性能明顯變差。因為自適應濾波器跟蹤目標進入穩定階段后,α,β的值都趨近于0,導致系統跟蹤目標主要依賴于目標預測位置,一但目標突然做高加速運動,目標的預測位置偏離實測位置越來越大,從而使誤差越來越大。
綜上分析,對于機動目標運動模型,自適應濾波器的濾波性能無法滿足實際應用中的需求。
3.4 α-β濾波算法的改進
下面分別從變向目標運動模型和變速目標運動模型兩種情況進行驗證,為了方便進行對比,其初始輸入參數信息與表1一致,且在目標轉向和目標做加速運動的時間都分別和上述仿真實驗完全一致。利用Matlab畫出其預測誤差方差分布圖,如圖5所示。
由圖5可看出,改進后的自適應α-β濾波器在目標做機動運動時,其濾波器的性能明顯得到改善,說明這種改進方法是可行的。對于機動性大的目標,α(k)、β(k)最小值應該取大些,對于機動性小的目標,α(k)、β(k)最小值應該取小些。
4 結語
本文基于LabVIEW平臺下完成α-β濾波算法的實現,并闡述了整個程序的編譯過程。然后,在此程序下對各個α-β濾波算法進行仿真,得出的結論是對于常增益α-β濾波器,α的取值在0.5附近,即濾波器對目標的實測位置和預測位置的可信度相當時,其濾波器的性能是最優的,目標預測誤差最小。在勻速運動目標模型下,自適應α-β濾波器的性能要優于常增益α-β濾波器。然后對自適應α-β濾波器分別在變向目標運動模型和變速運動目標模型下進行仿真分析,得出的結論是,在目標做大幅度機動時,自適應α-β濾波器的性能大大降低。最后對自適應α-β濾波器進行改進,讓α,β的值即使在濾波器進入穩定跟蹤狀態后也不趨近于零而是達到一個最小值,使系統保證有足夠的帶寬,這樣在目標跟蹤的穩定階段,就算目標發生機動,目標跟蹤算法也可以適用。通過仿真分析其目標預測誤差,驗證了此改進方法是可行的,這種算法的改進為開展導航雷達目標跟蹤算法的研究提供了技術支持,具有較強的工程應用價值。

圖5 對于兩種模型采用改進自適應α-β濾波算法目標預測誤差示意圖
[1]董小兵,張潤澤.自適應α-β濾波在雷達錄取跟蹤系統中的應用[J]. 大連海運學院學報,1986,1(12):66-72.
[2]章佳榮,王璨,趙國宇.精通LabVIEW虛擬儀器程序設計與案例實現[M].北京:人民郵電出版社,2013.
[3]王世遠.航海雷達與ARPA[M].大連:大連海事大學出版社,1998.
[4]何友,修建娟,關欣等.雷達數據處理及應用(第三版)[M].北京:電子工業出版社,2013.
[5]王紅亮,李楓,趙亦工.一種機動目標跟蹤的自適應α-β濾波算法[J]. 雷達科學與技術,2007,5(4):278-291.
[6]楊常青,鄭振宇.導航雷達與電子海圖[M].大連:海軍大連艦艇學院,2010.
[7]呂昆.雷達目標跟蹤算法的應用研究[D].西安:西安電子科技大學,2012.
[8]ARM 公司 Cortex-M3用戶指導用書[EB/OL].2009:1-9.
[9]穆曄.船用導航雷達ARPA跟蹤算法研究[D].上海:上海交通大學.2007.
[10]張巧麗.基于LabVIEW的運動目標跟蹤算法研究與實現[D].西安:陜西科技大學,2015.
[11]何振亞.自適應信號處理[M].北京:北京科學出版社,2002.
[12]費業泰.誤差理論與數據處理[M].合肥:合肥工業大學,2015.
[13]張明友,汪學剛.雷達系統(第二版)[M].北京:電子工業出版社,2006.
[14]丁鷺飛,耿富錄.雷達原理[M].西安:西安電子科技大學出版社,1997.
[15]周宏仁,敬忠良,王培得.機動目標跟蹤[M].北京:國防工業出版社,1991.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
