激光陀螺誤差分析的Allan方差法改進研究
2018-02-01 01:14:08,
導航定位與授時 2018年1期
,
(1.遼寧石油化工大學 信息與控制工程學院,遼寧 撫順 113001;2.哈爾濱工程大學 自動化學院,哈爾濱150001)
0 引言
激光陀螺的固態特性使其成為構建高精度捷聯慣性導航系統的理想器件。憑借著瞬時啟動快、耐沖擊能力強、數字輸出、工作可靠、平均無故障時間長等諸多優點[1],激光陀螺被廣泛應用于航海、航空、定位定向、陸地導航和航天火箭等領域[2-4]。作為高精度慣性器件,激光陀螺的隨機誤差特性是影響其精度提高的重要因素,因此,準確且有效地分析和辨識出激光陀螺隨機誤差中的各種噪聲效應,針對各效應的影響的比重進行有效地補償或改進,是提高激光陀螺精度的一種有效途徑[5]。
Allan方差法是對激光陀螺的隨機誤差進行辨識與分析中被普遍采用的有效手段之一[6-7]。然而文獻[8]指出Allan方差法沒有包含導航用的零偏不穩定性項,并通過經典方差法與Allan方差法之間的恒等關系指出角速度隨機游走項和速率斜坡項均為負值,且量化噪聲項也有負值情況出現的可能,而這與方差為正值的思想相悖。因此需以經典方差法來評價激光陀螺的性能。文獻[9]采用阻尼振蕩的思想建立功率譜密度的數學模型,最終通過建立經典方差法的擬合公式來完成漂移項的估計,解決了上述Allan方差法在分析過程中存在的不足,但經典方差法的擬合精度要比Allan方差法的擬合精度差。文獻[10-12]提出的動態Allan方差法能夠全面和準確地評價陀螺的性能,由于動態Allan方差法是由Allan方差法通過窗口截取得到的,其本質是三維的Allan方差表現形式,所以Allan方差法中存在的諸多不合理之處都會直接引入到動態Allan方差法中。
為此,本文將阻尼振蕩法的分析思想和模型引入到動態Allan方差法中,建立了改進動態Allan方差法的數學模型,并通過改進Allan方差法對實際測量激光陀螺數據的誤差特性進行了辨識與分析,仿真和分析結果驗證了改進動態Allan方差法的正確性和有效性。
1 阻尼振蕩形式的隨機漂移模型
阻尼振蕩形式的隨機漂移模型是將噪聲項假設為各種阻尼振蕩形式,推導出其功率譜密度,并將其與量化噪聲項的功率譜密度結合起來形成隨機漂移的功率譜密度表達式,經傅立葉逆變換后,得到時域上的經典方差表達形式:
(1)



(2)
式中,m′代表慢漂類阻尼振蕩,m″代表快漂類阻尼振蕩,m代表不快不慢漂類阻尼振蕩。文獻[13]對此已經給出了詳盡的定義及推導過程,本文在此便不再贅述。
式(1)和式(2)也可以分別簡化為如下所熟知的表達形式:
(3)
(4)
對比式(3)和式(4)可以看出,式(4)的慢漂項中缺少了a0項,此項是由1/f噪聲引起的,通常稱之為零偏不穩定性項,傳統Allan方差法并非缺少對此項的估計,而是在采用阻尼振蕩法之后,由經典方差法表達式轉化Allan方差法表達式的過程中,此項中不包含相關時間而最終被消去。對于整個誤差項的估計需通過經典方差法輔助Allan方差法來完成。實際上,只需完成經典方差法的參數估計,再通過式(3)與式(4)之間系數的關系直接計算出精細的Allan方差法的各項系數,可省去對Allan方差法的估計過程。
在傳統Allan方差法中,各誤差項的方差為正值,因此,要求各誤差項均大于零。而采用阻尼振蕩形式的隨機漂移模型只要求這三類漂移分別大于零,而并未要求每類漂移中所包含的子誤差項均大于零,這便巧妙地避開了傳統Allan方差法中的量化噪聲項、角度隨機游走項和速率斜坡項出現負值卻無法給出合理解釋的情況。
由經典方差法推得的Allan方差的擬合精度略遜于傳統的Allan方差法[8]。相比傳統Allan方差法,動態Allan方差法的擬合結果又更為精確些。所以,本文將阻尼振蕩法的經典方差模型引入到動態Allan方差法之中,用以提高擬合結果的精細程度。
2 基于動態Allan方差的改進Allan方差法
動態Allan法是Allan方差法的三維表現形式,能夠體現出慣性器件的瞬時穩定性[14-15],它的一個突出優點就是能夠體現隨機誤差的非平穩性變化。在動態Allan方差法中,通過一個以給定時刻t1為中心點,長度為T的矩形窗口來截取數據進行Allan方差估計。然后窗口滑動到下一中心時刻t2,估計這一時刻矩形窗口數據的Allan方差。需要注意的是相鄰兩時刻的矩形窗口須有交疊部分。如此反復地進行此項工作就能夠觀察出代表隨機誤差的Allan方差隨時間增長而不斷演變的過程,這也就是動態Allan方差法的形成過程。而改進Allan方差法的形成過程與動態Allan方差法的形成過程是一致的,只是對窗口截取數據的Allan方差估計采用經典方差法的式(3)來完成,其推導過程如下。
考慮連續時間的數據測量,假設x(t)為激光陀螺輸出的隨機誤差數據。可以使用窗口區間為t-T/2≤t′≤t+T/2的矩形窗口PT(t′)對隨機誤差數據x(t′)進行截取,截取得到的數據為
xT(t,t′)=x(t′)PT(t-t′)
(5)
式中,xT(t,t′)就是截取所得的數據。長度為T的矩形窗口PT(t)有如下的定義形式:
(6)
對于任意一個窗口來說,時刻t是一個固定的參數,它代表著分析窗口PT(t-t′)的中心。t′代表著窗口內流失的時間。由式(3)可得到t′時間內經典方差的估計窗口Aτ(t′),通過截取的數據和Aτ(t′)進行卷積運算可建立一個增量過程Δ(t,t′,τ)。

(7)
式中,各變量的約束條件如下:
(8)
t-(T/2-τ)≤t′≤t+(T/2-τ)
(9)
0<τ≤τmax
(10)
其中,τmax是經典方差估計窗口內數據的最大的觀測時間間隔,可以選為
τmax=T/3
(11)
經典方差法的實質是先對一組陀螺輸出信號求取均值,通過陀螺輸出信號與均值作差,得到的差值序列即被認定為隨機誤差,最后對隨機誤差序列平方的總體取均值,其簡化形式可寫成
(12)
式中,Δ(tk,τ)就是tk時刻,相關時間為τ時的隨機誤差。符號<·>代表對時間序列的總體取均值。
將式(7)中的增量過程代入式(12),可得

(13)

=E[<Δ2(t,t',τ)>]
(14)
(15)
此外,需要指出的是選擇不同的分析窗口類型可以有效地改進其性能,例如選擇海明、漢寧、高斯或者三角窗口等。本文旨在對阻尼振蕩形式的動態Allan方差法進行驗證與分析,因此,本文中僅采用了單一的矩形分析窗口,而并未過多地對其他窗口進行深入研究。但若需進一步提高改進動態Allan方差法的表現性能,窗口的選擇是后續值得進一步深入研究的。
3 激光陀螺零偏數據的誤差特性分析
本文對實驗室內現有的某型激光陀螺的零偏數據進行了實際測量。并分別采用了基于阻尼振蕩的Allan方差法和改進動態Allan方差法對采集的激光陀螺零偏數據進行了辨識與對比分析。
試驗數據采集過程中,將激光陀螺固定在靜止的速率轉臺之上,由速率轉臺為其提供一個水平基準。采樣時間為10多個小時,采樣頻率為1Hz。采樣得到的激光陀螺數據如圖1所示。
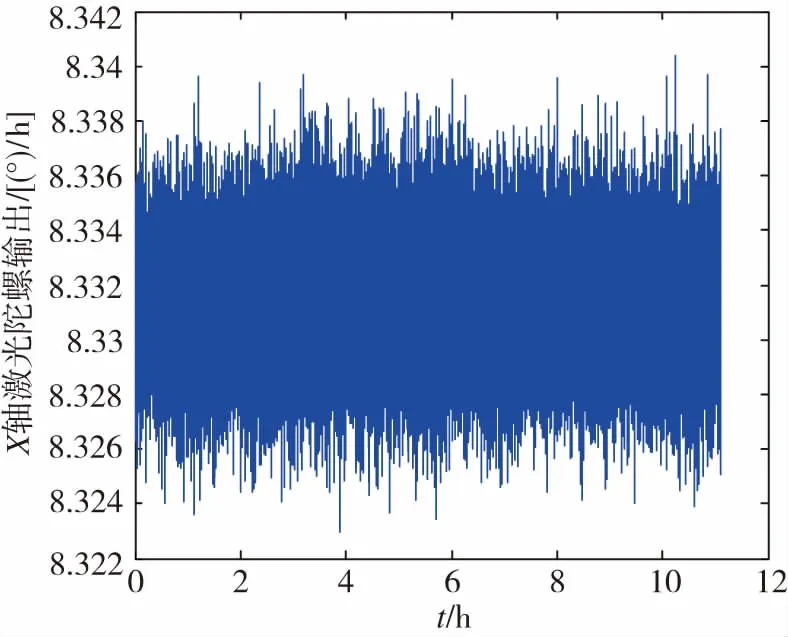
圖1 X軸激光陀螺輸出Fig.1 The output of X axis Laser gyro
對采集的數據進行功率譜密度分析,功率譜密度的低頻和高頻部分分別如圖2和圖3所示。
從低頻部分圖2中可以估計出頻帶的弛豫時間τm為1個多小時,較采樣周期τ大很多,即τ/τm?1,因此可以看作慢漂類漂移。因此在式(3)中應包含慢漂類漂移。而從高頻部分圖3中可以看出,激光陀螺的零偏數據中只含有快漂類漂移,而不含有不快不慢類漂移。所以對此次采集的激光陀螺零偏數據的誤差項估計應采用下面的經典方差擬合公式。
(16)
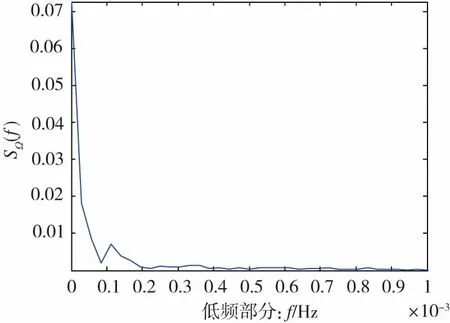
圖2 激光陀螺輸出數據的低頻部分Fig.2 Low frequency part of the laser gyro output data
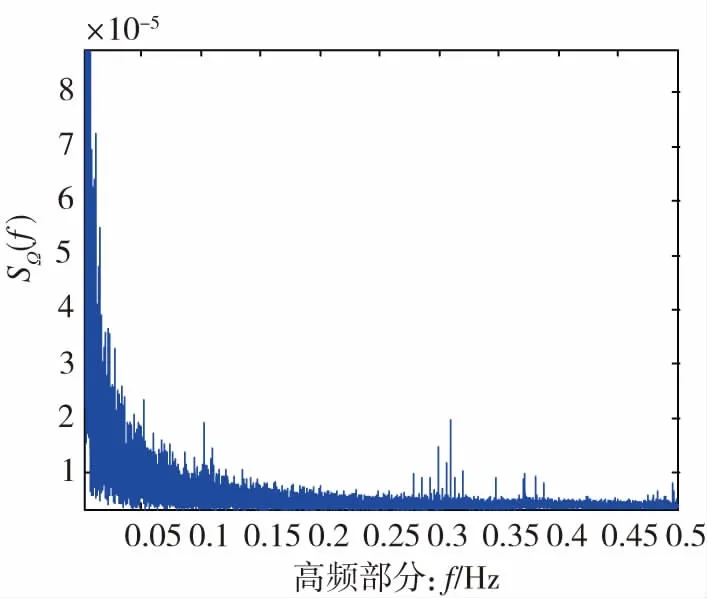
圖3 激光陀螺輸出數據的高頻部分Fig.3 High frequency part of the laser gyro output data
設定改進Allan方差法的矩形窗口長度T為3600s。由式(16)可以得到激光陀螺數據的Allan方差法和改進Allan方差法的曲線擬合結果如圖4和圖5所示。圖4中紅色曲線為激光陀螺輸出零偏數據的Allan方差曲線,藍色曲線為其擬合曲線。
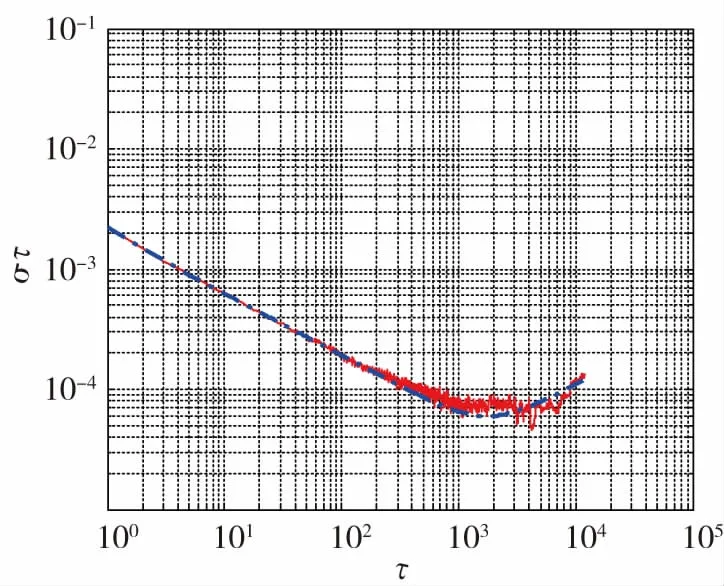
圖4 基于阻尼振蕩法的Allan方差雙對數擬合圖Fig.4 Double logarithmic fitting of Allan variancebased on damped oscillation method
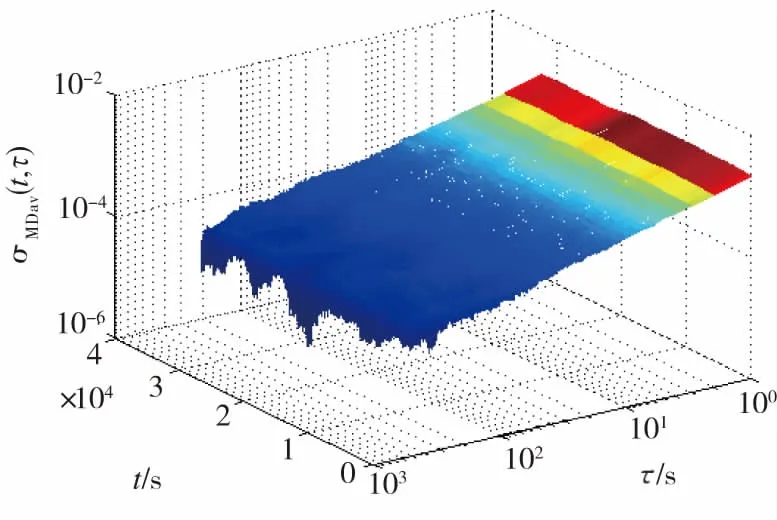
圖5 激光陀螺輸出數據的改進Allan方差曲線Fig.5 Improved Allan variance curve of laser gyro output data
由上述兩種方法的擬合結果得到的快漂項和慢漂項及其展開得到的各子誤差項的結果如表1所示。
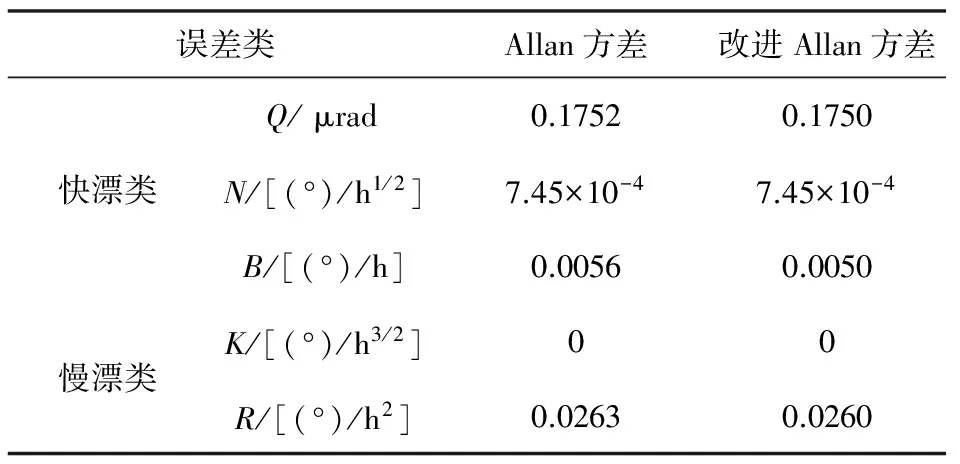
表1 兩種分析方法辨識結果的對比
表1中的Q、N、B、K和R分別為激光陀螺的量化噪聲項、隨機游走項、零偏不穩定性項和角速率隨機游走項和速率斜坡項。Allan方差法是由經典方差法經恒等關系式推導出來的,其誤差項直接由辨識系數經單位轉換得到,而改進動態Allan方差法的誤差項是由擬合后得到的經典方差系數a0~a4經式(4)得到Allan方差系數,再由Allan方差系數經單位轉換得到的。表1中的K項的辨識結果均為零,說明在此激光陀螺輸出的零偏信號中不存在馬爾科夫過程。N項和B項都很小,說明該激光陀螺的諧振腔的品質較高。
在對表1結果的整體對比中可以看出,Allan方差法與改進Allan方差法辨識出的快漂類和慢漂類漂移結果基本保持一致,只是在部分誤差項的辨識結果中,改進動態Allan方差法的辨識結果顯得更為精細些。這是因為DAVAR是由多個固定長度的Allan方差所組成的,其擬合結果為多個Allan方差的擬合結果的平均,反映的是多次計算所得的各誤差系數的平均水平。因此,在隨機信號為平穩信號的情況下,改進動態Allan方差法的辨識結果就顯得更為精確些。
改進Allan方差法的另一個優勢是從它的分析圖中能夠觀察出隨機信號受污染的情況,特別是受溫度、濕度等環境干擾的情況。從圖5中可以看出,該隨機信號是較為平穩的,受環境影響較小。
為了進一步說明改進Allan方差法對非平穩信號的分析能力。本文通過溫箱控制激光陀螺的工作環境溫度變化,采集了近30h的激光陀螺零偏數據,為了提高改進Allan方差法的運行效率,對采集的激光陀螺零偏數據進行了百秒平滑,平滑后的結果及溫箱溫度變化情況如圖6所示。

圖6 變溫環境采集的激光陀螺數據Fig.6 Laser gyro data collected in achanging temperature environment
由于圖6中的激光陀螺輸出信號為非平穩信號,而Allan方差法只能對平穩信號進行辨識,因此本文僅給出了改進Allan方差法的辨識結果。設定矩形窗口長度T為330,得到變溫環境下的激光陀螺零偏數據的改進Allan方差如圖7所示。
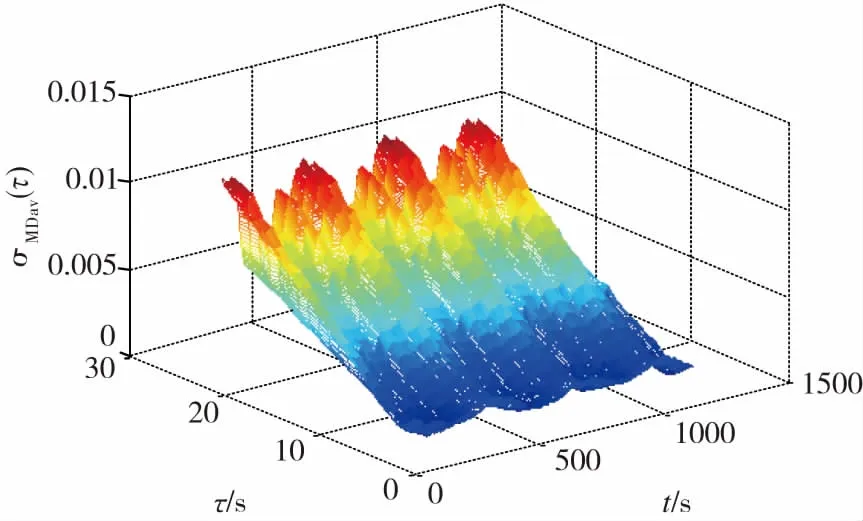
圖7 變溫環境下激光陀螺數據的改進Allan方差圖Fig.7 Improved Allan variance curve for laser gyrodata in changing temperature environment
從圖7中可以很清晰地看出動態誤差信號隨時間發生的周期性變化,即該方法能夠表現出激光陀螺的隨機誤差特性受溫度影響而變化所體現出的時變特性。因此,從上述對改進Allan方差法的辨識和分析結果中可以看出,改進Allan方差法對激光陀螺的誤差特性進行辨識與分析是有效和可行的,不僅能夠對激光陀螺輸出的平穩信號進行辨識與分析,還能夠完成在變化環境下所采集到數據的非平穩信號分析。
4 結論
傳統Allan方差法對各誤差項的分析存在不足,而阻尼振蕩方法在對各誤差項的分析較為合理,但其通過經典方差法擬合的結果導致擬合精度稍差。因此,本文在阻尼振蕩法的基礎上引入了動態Allan方差法,將阻尼振蕩模型與動態Allan方差法模型結合起來進行改進,并給出了改進Allan方差法的具體推導過程。通過實測的激光陀螺零偏數據對Allan方差法和改進Allan方差法進行了辨識結果的對比和分析。分析結果驗證了改進Allan方差法的有效性和可行性。通過對變溫環境下的激光陀螺零偏數據進行對比分析可知,改進Allan方差法同時具備平穩信號和非平穩隨機信號的處理分析能力。
[1] 唐百勝,江騰飛. 基于貝葉斯理論的激光陀螺可靠性評估[J]. 導航與控制,2016,15(2): 51-56.
[2] 周冉輝. 艦用高精度激光陀螺慣導內桿臂誤差分析及補償方法研究[J]. 艦船科學技術,2016,38(7): 120-123.
[3] 楊建強,劉燦,尹中鋒,等. 激光陀螺定位定向系統工作模式機理分析[J]. 激光與紅外,2017,47(3): 332-336.
[4] 李龍,梁可,陳林峰,等. 基于菲涅爾透鏡的零閉鎖激光陀螺抗輻照方案[J]. 中國慣性技術學報,2017,25(1): 115-118.
[5] 李漢舟. 基于激光捷聯慣導的實時高精度動態姿態測量系統研究[D]. 西安: 西北工業大學,2015.
[6] 楊鴻波,臧強,高晶敏,等. 四頻差動激光陀螺隨機誤差建模與濾波研究[J]. 壓電與聲光, 2015,37(4): 558-560.
[7] 魏建倉,郭岳山,劉東娜. 船用光學陀螺動態隨機誤差特性分析方法[J]. 水道港口,2016,37(6): 657-662.
[8] 張梅, 張文. 激光陀螺漂移的研究方法(一)[J]. 中國慣性技術學報, 2009,17(3): 210-213.
[9] 張梅, 張文. 激光陀螺漂移的研究方法(二)[J]. 中國慣性技術學報, 2009,17(3): 350-355.
[10] 魏國, 龍興武. 基于動態Allan方差的機抖激光陀螺隨機誤差研究[J]. 中國激光, 2010,37(12): 2975-2979.
[11] 張謙,王瑋,王蕾,等. 基于動態Allan方差的光纖陀螺隨機誤差分析及算法改進[J]. 光學學報,2015,35(4): 57-63.
[12] 汪立新,朱戰輝,李瑞. 動態Allan方差改進算法及其在FOG啟動信號分析中的應用[J]. 紅外與激光工程, 2016 , 45(7): 261-268.
[13] 高伯龍, 王關根. 陀螺數據的數學處理[J]. 國防科學技術大學學報, 1979(1): 91-106.
[14] Galleani L, Tavella P. The dynamic Allan variance V: recent advances in dynamic stability analysis[J]. IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control, 2016,63(4): 624-635.
[15] Draganová K, Moucha V, Volěko T, et al. Non-stationary noise analysis of magnetic sensors using Allan variance[J]. Acta Physica Polonica A, 2017,131(4): 1126-1128.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
終身教育研究(2014年5期)2014-02-28 01:23:06
