基于非差模型的GPS衛星實時鐘差估計精度分析
2018-02-01 01:13:52,,,
導航定位與授時 2018年1期
,,,
(長安大學 地質工程與測繪學院,西安 710054)
0 引言
實時精密單點定位技術(Real Time Precise Point Positioning,RT-PPP)已成為當前全球衛星導航系統(Global Navigation Satellite System,GNSS)領域的研究熱點,也將是目前乃至未來實時高精度動態定位的主要技術手段之一。其中,實時精密衛星軌道和實時精密衛星鐘差是實現RT-PPP應用的兩大關鍵技術[1-3]。目前,國際GNSS服務組織(International GNSS Service,IGS)提供的全球定位系統(Global Positioning System,GPS)超快速預報軌道產品精度為5cm,最終軌道產品精度為2.5cm,兩者精度量級相當。然而,GPS超快速預報鐘差產品精度僅為3ns,等效距離誤差為0.9m,遠低于標稱精度為75ps的最終鐘差產品[4]。雖然GPS超快速預報軌道產品能夠滿足時間和精度要求,但是GPS實時衛星鐘差的精度和穩定性限制了RT-PPP的精度,直接制約了其在大氣研究、時間傳遞、低軌衛星精密定軌等方面的精密應用。另一方面,鐘差的內插或者外推精度遠遠不如軌道的外推精度,在較短的時間內,外推或內插的結果誤差就可達到數米,這一點對實時精密單點定位也非常不利。
針對這種情況,國內不少機構和組織也在開展實時GPS精密軌道和鐘差的相關研究,如武漢大學、同濟大學、長安大學等[5-7]。實時鐘差估計多采用歷元間差分方法,以提高處理效率,保證鐘差產品的實時性。通過在歷元間求差,能夠消除大量的模糊度參數,只保留數量相對較少的衛星鐘差、接收機鐘差和對流層參數,因此處理效率較高[8-9]。近年來有學者研究了基于非差觀測量的實時鐘差估計以及非差和雙差混合差分的鐘差估計方法[10-12]。利用非差觀測量進行實時鐘差估計能夠保留模糊度參數,為后續雙差模糊度固定和衛星硬件延遲估計提供可能。鑒于此,本文采用非差觀測模型對衛星鐘差進行實時解算,通過算例分析得出,采用最終軌道估計的實時鐘差精度在0.2ns左右,采用實時軌道估計的實時鐘差精度在0.25ns左右。
1 非差衛星鐘差估計模型
對于非差衛星鐘差模型,一般采用消電離層組合觀測值。單個測站單顆衛星的觀測值,非差載波相位和偽距觀測值誤差方程如下:
利用由上述公式建立的誤差方程,未知參數包括接收機鐘差、衛星鐘差、對流層延遲和模糊度,參數求解方法可采用序貫最小二乘。針對模糊度參數和對流層濕延遲參數,在分段時間內對流層濕延遲參數是不變的,在沒有發生周跳時衛星模糊度參數也是不變的,因此將其作為分段非時變參數。
2 實時鐘差估計算法流程
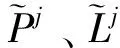
非差模型的實時鐘差估計是利用實時數據預處理后的偽距、載波觀測值,軌道及其他輔助文件,采用非差模型實時解算衛星鐘差。其算法流程主要包括衛星天線相位中心改正、潮汐改正、地球自轉改正等各項誤差改正,非差觀測模型組建,衛星鐘差實時解算,壞測站剔除和解算精度評估,對流層和模糊度參數約束,鐘差參考基準選擇幾個方面。非差模型的實時鐘差估計算法流程如圖1所示。
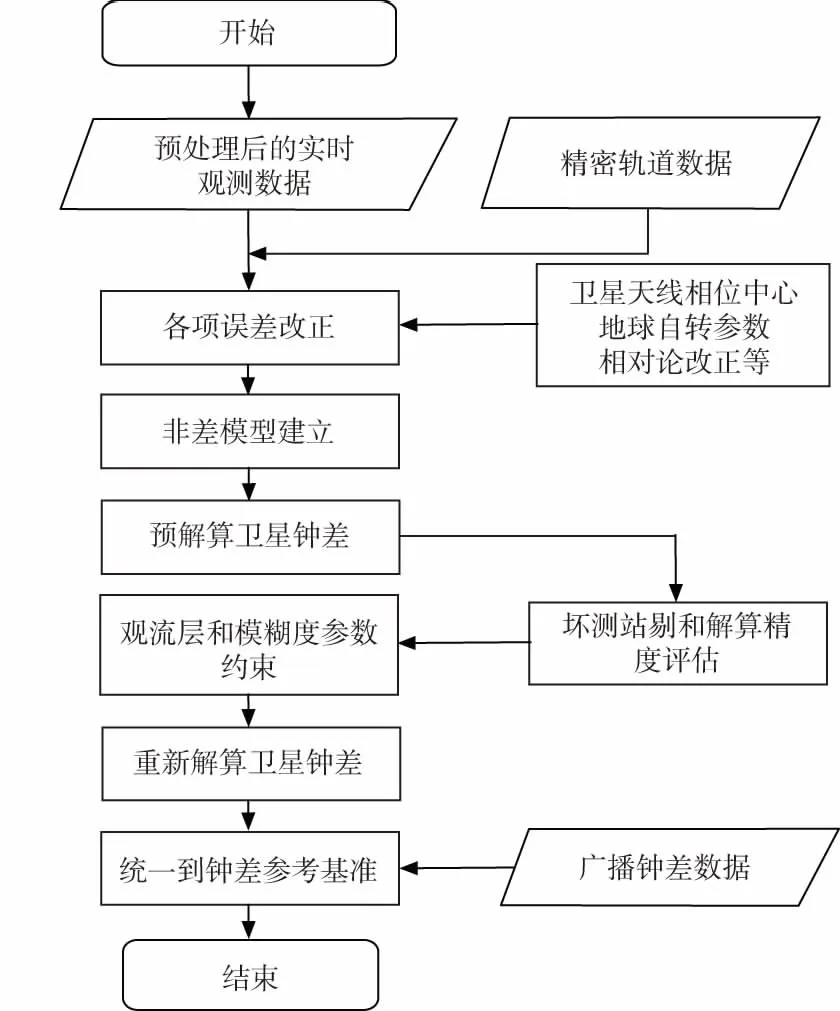
圖1 非差模型的實時鐘差估計算法流程Fig.1 Real-time clock estimation algorithmfor un-differenced model
在鐘差估計過程中,首先讀取所有測站的觀測數據并確定解算基準測站鐘,讀取軌道數據、地球自轉參數、天線相位中心和硬件延遲偏差等數據,然后進行潮汐誤差、相對論誤差和天線相位纏繞等誤差的改正,確定對流層干延遲和濕延遲投影系數,最后建立非差估計方程,采用序貫最小二乘進行參數估計。
因為GPS量測值是站星之間的相對時間延遲,這意味著不能同時確定所有的衛星和接收機鐘差,必須先固定一個基準鐘,再求匹配該基準鐘的相對鐘差。已有專家證明只要保證基準鐘的鐘差精度都優于10-16s,相對鐘差的系統性偏差完全可以被接收機鐘差吸收,不影響定位結果[13],因此本文引入某個外接高精度原子鐘的測站接收機鐘作為基準鐘。另外,為了得到更可靠的鐘差結果,在第一次解算結束后,根據鐘差估計結果得出各測站每顆衛星的殘差值,根據其值進行后驗控制,剔除各測站殘差較大的衛星。
為了全面地分析基于非差模型的GPS衛星實時鐘差估計精度,本文利用區域和全球測站分別解算實時鐘差,兩者在解算時采用的策略一致,但是考慮到區域測站所形成的衛星觀測弧段不完整,區域鐘差與全球鐘差的精度評估方法會有所區別。
3 算例分析
3.1 鐘差精度評估方法
在鐘差精度評估時,首先選擇一個參考衛星,將實時解算的鐘差與最終鐘差產品分別與各自的參考衛星鐘差作差,消除基準不同對鐘差結果的影響,而后再在各自消除基準鐘影響的計算結果之間作差,所得的二次差能夠較好地反應鐘差參數的估計效果[14]。因此,本文采用二次差的標準差(Standard Deviation,STD)作為實時鐘差估計精度,具體公式為

當采用區域數據實時解算衛星鐘差時,可觀測到的衛星弧度是不連續的,每1h所有測站能觀測到的衛星都在變化,所以本文每小時選擇一次參考衛星(原則:觀測時長最長的衛星作為參考衛星),每小時統計一次STD,然后對一天的STD取平均作為當天的鐘差精度。當進行全球實時鐘差解算時,可觀測到的衛星弧度是連續的,所以一天內選擇同一顆衛星作為參考衛星,每天統計一次STD作為當天的鐘差精度。
3.2 區域實時鐘差估計精度分析
為了分析區域實時鐘差估計的精度,本文選擇歐洲區20個能夠提供高頻觀測數據的監測站作為實驗站點進行試驗驗證,測站展圖如圖2所示。

圖2 歐洲區域實時鐘差解算的測站分布Fig.2 Distribution of station used for real-time clockestimation in European region
采用IGS的最終軌道產品,以及歐洲區域20個測站2015年1月1日—2015年3月31日1s高頻觀測數據實時解算GPS衛星鐘差,將獲取的鐘差結果與IGS最終精密鐘差(30s)進行二次差比較,統計其平均STD值。結果如圖3所示。
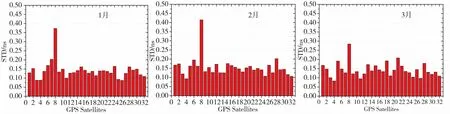
圖3 歐洲區鐘差平均估計精度Fig.3 Average accuracy of clock estimation in European region
從圖3可以看出 ,采用IGS最終軌道實時解算GPS區域衛星鐘差,估計精度基本處于0.15ns,其中G08衛星的實時鐘差精度較差,是因為此段時間內G08衛星的觀測數據較少。統計鐘差精度的平均值、最差值和最優值,結果如表1所示。

表1 歐洲區鐘差平均估計精度
從表1可以看出,采用IGS最終軌道產品,以及歐洲區域20個測站2015年1月1日—3月31日1s高頻觀測數據實時解算衛星鐘差,1月份的平均估計精度為0.141ns,2月份的平均估計精度為0.155ns,3月份的估計精度為0.143ns,連續90天平均估計精度為0.145ns。除了G08號衛星外,鐘差精度總體較為平穩。
3.3 全球區域實時鐘差估計精度分析
為了分析全球實時鐘差估計的精度,本文選擇全球范圍內80個能夠提供高頻觀測數據的監測站作為實驗站點進行試驗驗證,測站展圖如圖4所示。
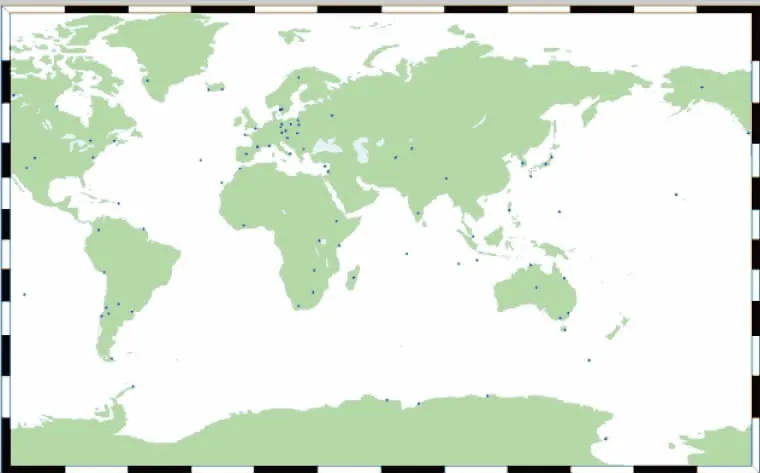
圖4 全球區域實時鐘差解算的測站分布Fig.4 Distribution of station used for real-time clockestimation in Global region
采用IGS的最終軌道產品,以及全球80個測站2016年1月1日—3日1s高頻觀測數據實時解算GPS衛星鐘差,將獲取的鐘差結果與IGS最終精密鐘差(30s)進行二次差比較,統計其STD值。結果如圖5所示(G01為參考鐘)。

圖5 全球區鐘差平均估計精度Fig.5 Average accuracy of clock estimation in Global region
從圖5可以看出,采用IGS最終軌道實時解算GPS全球衛星鐘差,估計精度基本處于0.2ns。統計鐘差精度的平均值、最差值和最優值,結果如表2所示。
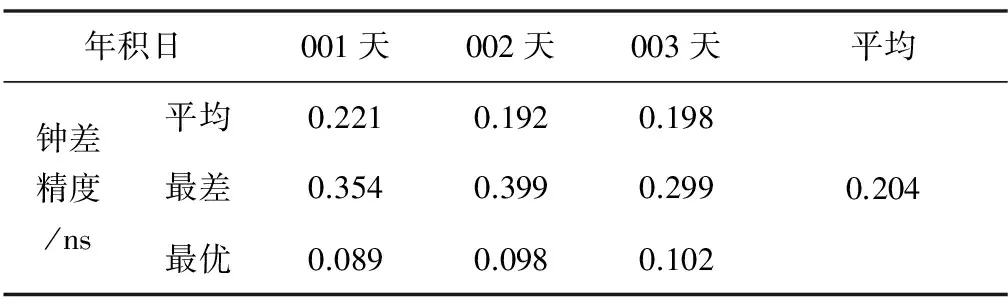
表2 全球區鐘差平均估計精度
從表2可以看出,采用IGS最終軌道產品,以及全球80個測站2016年1月1日—3日1s高頻觀測數據實時解算GPS衛星鐘差,001天的估計精度為0.221ns,002天的估計精度為0.192ns,003天的估計精度為0.198ns,連續3天平均估計精度為0.204ns。鐘差精度總體較為平穩,偶爾會出現比較大的現象。
3.4 IGS實時鐘差產品精度評估及對比
為了分析實時估計的衛星鐘差與IGS實時鐘差產品的差異,采用IGS實時軌道產品,以及3.3節算例中全球80個測站2016年1月1日—3日1s高頻觀測數據實時解算GPS衛星鐘差,將獲取的鐘差結果與IGS最終精密鐘差(30s)進行二次差比較,統計其STD值;同時將IGS的實時鐘差產品與IGS最終精密鐘差(30s)進行二次差比較,統計其STD值。將兩種產品獲得的STD值進行對比,結果如圖6所示(G01為參考鐘)。

圖6 實時估計鐘差和IGS實時鐘差產品精度對比Fig.6 Accuracy comparison of real-time estimation of clock and IGS real-time clock product
從圖6可以看出,采用IGS實時軌道實時解算衛星鐘差,鐘差精度基本在0.3ns以下,IGS實時鐘差產品的精度基本在0.2ns以下。實時估計的衛星鐘差相比IGS實時鐘差產品較差,這是由于IGS實時軌道和鐘差產品的解算方案、解算軟件以及所采用的數據均一致,而本文實時估計的鐘差在很多方面與其不同,如誤差改正模型、數據質量控制方法、觀測模型、殘差控制策略、測站數目及分布、基準鐘和約束條件等,解算得到的結果符合性和相容性都會有差異,且兩種實時鐘差產品在精度評定時選擇IGS最終鐘差產品為參考,這對IGS實時鐘差產品的評估也會有利。統計兩種產品鐘差精度的平均值、最差值和最優值,結果如表3所示。
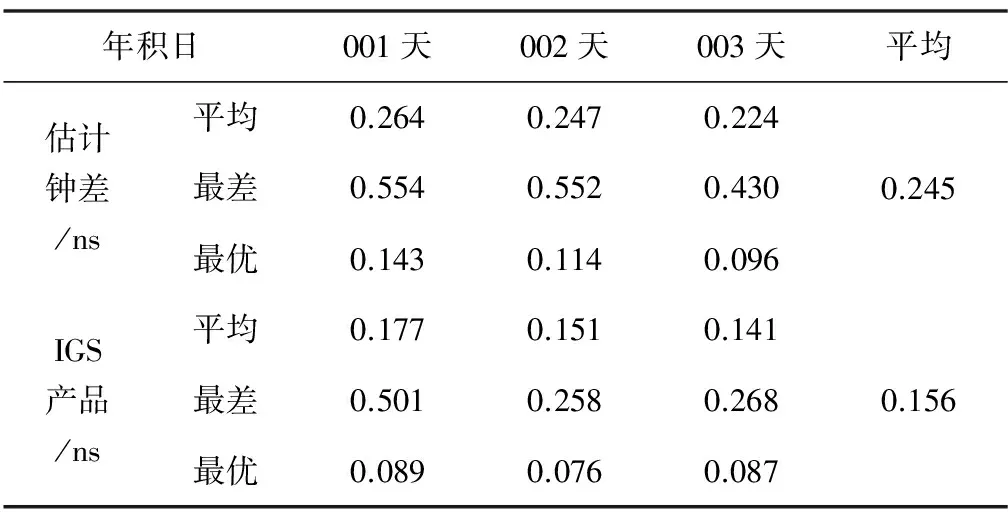
表3 實時估計鐘差和IGS實時鐘差產品精度對比
從表3可以看出,采用IGS實時軌道產品,以及全球80個測站2016年1月1日—3日1s高頻觀測數據實時解算衛星鐘差,001天的估計精度為0.264ns,002天的估計精度為0.247ns,003天的估計精度為0.224ns,連續三天平均估計精度為0.245ns;IGS實時鐘差產品001天的估計精度為0.177ns,002天的估計精度為0.151ns,003天的估計精度為0.141ns,連續三天平均精度為0.156ns。從結果可以看出,目前GPS實時鐘差精度能達到0.2ns以內。
4 結論
本文通過分析實時衛星鐘差估計的解算過程,實現了基于非差模型的GPS衛星實時鐘差估計,利用區域和全球數據、最終和實時軌道分別求解實時鐘差,并將其與IGS實時鐘差產品進行對比,分析了GPS實時鐘差產品的精度,得出以下結論:采用IGS最終軌道產品實時解算衛星鐘差,區域平均鐘差估計精度為0.145ns,全球平均鐘差估計精度為0.204ns;采用IGS實時軌道產品實時解算衛星鐘差,平均鐘差估計精度為0.245ns;IGS實時鐘差產品平均精度為0.2ns以內。實時估計的鐘差和IGS實時鐘差產品精度差異有很大一部分是由于雙方采用的鐘差解算策略不同造成,IGS實時鐘差產品和IGS實時軌道產品是同一軟件求解得到,符合性更好,且兩種實時鐘差產品在精度評定時選擇IGS最終鐘差產品為參考,這對IGS實時鐘差產品的評估也會有利。
本文只分析了GPS衛星的實時鐘差精度,北斗衛星導航系統目前正在啟動全球化布設,下一步將對北斗衛星的實時鐘差精度進行分析。
[1] 施闖,樓益棟,宋偉偉,等. 廣域實時精密定位原型系統及初步結果[J]. 武漢大學學報(信息科學版),2009,34(11):1271-1274.
[2] 宋偉偉. 導航衛星實時精密鐘差確定及實時精密單點定位理論方法研究[D]. 武漢:武漢大學,2011.
[3] 易重海. 實時精密單點定位理論與應用研究[D].長沙:中南大學,2011.
[4] http://igsws.unavco.org/components/prods.html.
[5] 蔡華,趙齊樂,樓益棟. 精密衛星鐘差確定系統的實現與精度分析[J]. 武漢大學學報(信息科學版),2009,34(11):1293-1296.
[6] 李浩軍,王解先,王虎,等. 基于GNSS網絡的衛星精密鐘差估計及結果分析[J]. 武漢大學學報(信息科學版),2010,35(8):1001-1003.
[7] Fu W, Zhang Q, Huang G, et al. Performance analysis of real-time BDS clock estimation with different orbit accuracy[C]//China Satellite Navigation Conference (CSNC). Changsha, 2016:99-106.
[8] 李黎,匡翠林,朱建軍,等. 基于IGU預報軌道實時估計精密衛星鐘差[J]. 大地測量與地球動力學,2011,31(2):111-116.
[9] 樓益棟,施闖,周小青,等. GPS精密衛星鐘差估計與分析[J]. 武漢大學學報(信息科學版),2009,34(1):88-91.
[10] 李星星,徐運,王磊. 非差導航衛星實時/事后精密鐘差估計[J].武漢大學學報(信息科學版),2010,35(6):661-664.
[11] 趙齊樂,戴志強,王廣興,等.利用非差觀測量估計北斗衛星實時精密鐘差[J]. 武漢大學學報(信息科學版),2016,41(5):686-691.
[12] 何明憲,李星星,李盼,等. 基于非差與歷元差分兩種觀測模型估計精密衛星鐘差的方法比較[J]. 大地測量與地球動力學,2011,31(1):95-99.
[13] 葉世榕. 非差相位精密單點定位理論與實現[D]. 武漢:武漢大學,2002.
[14] 劉偉平,郝金明,于合理,等. 利用非差觀測量確定導航衛星精密軌道與鐘差的方法研究[J]. 大地測量與地球動力學,2014,34(1):169-172.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
現代裝飾(2022年4期)2022-08-31 01:39:32
現代裝飾(2022年3期)2022-07-05 05:55:06
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
Coco薇(2015年1期)2015-08-13 02:23:50
玩具(2009年10期)2009-11-04 02:33:14
個人電腦(2009年9期)2009-09-14 03:18:46
