基于北斗短報文通信的水質監測系統設計*
2018-01-29 01:42:30王星星趙賢林
網絡安全與數據管理 2018年1期
王星星,姜 嵐,黃 科,趙賢林
(中冶華天工程技術有限公司,江蘇 南京 210000)
0 引言
巢湖是我國五大淡水湖之一,坐落于長江和淮河之間,位于安徽省中部,流域獨特的地理位置、良好的生態環境和豐富的自然資源,為地區經濟發展提供了優越的條件,巢湖水環境質量狀況直接關系到當地社會經濟發展目標的實現[1]。20世紀 60~70年代初期巢湖處于中營養狀態,80年代中期,受人類活動的影響,巢湖及其流域生態系統遭到嚴重破壞,湖盆淤積,水質迅速惡化,已經成為長江下游地區典型的富營養湖泊[2]。因此,針對巢湖水質實施自動在線監測,構建巢湖水環境評價預警系統顯得尤為重要。
國內現有的遠程水質數據采集主要有3種方式:一為采用PLC采集通過以太網傳輸,此種方式需要基建施工架設網絡,工程量大、施工周期長、資金消耗大;二為采用ZigBee或者無線電波的方式傳輸數據,此種方式通信距離近,中控室需要建立在水質采集點附近,對中控室的選點造成很大的限制;三為采用GPRS方式傳輸數據,此種方式雖然能夠實現大面積覆蓋,但是依賴基站通信,在人跡較少或者多山地區容易出現信號盲區,導致數據傳輸的中斷。而本文提出的基于北斗短報文通信的遠程水質采集傳輸系統,在實現大面積范圍覆蓋的同時,又能做到無信號盲區,保證水質采集的連續與穩定。
1 系統總體架構設計
基于北斗短報文通信的水質監測系統設計主要由水質傳感器模塊(如溫度、pH、濁度、溶解氧、電導率、COD、氨氮、TP、TN等傳感器)、信號調理模塊、傳感器清洗模塊、北斗通信模塊、北斗指揮型用戶機組成。系統結構框圖如圖1所示。
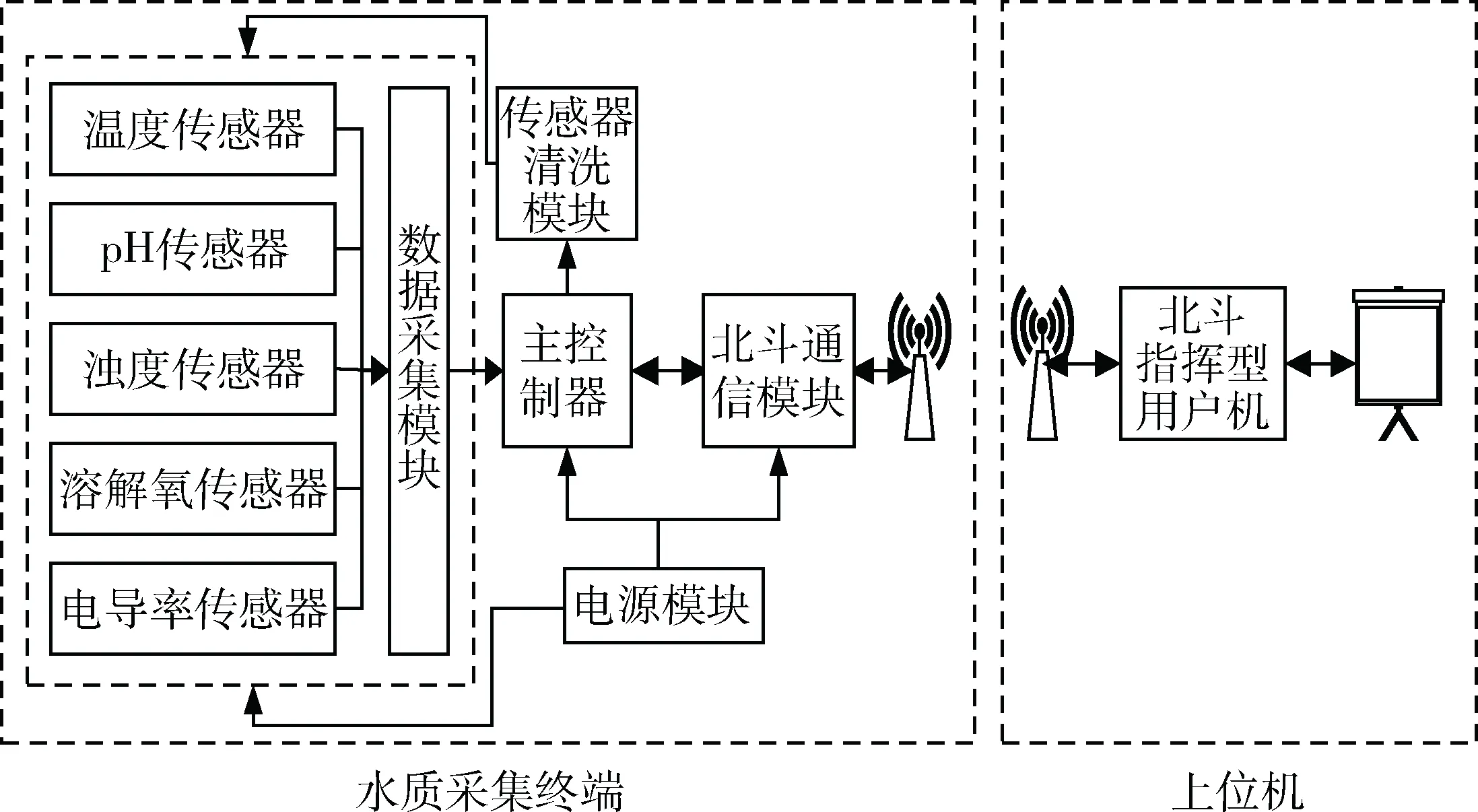
圖1 系統結構框圖
本系統工作原理:水質傳感器信號輸出形式分為兩種,第一種為4~20 mA信號,此種傳感器通過I-V轉換電路將電流信號轉化為電壓信號,現場水質采集終端中主控制器接收該電壓信號之后通過AD轉換為數字信號并進行相應的處理。第二種為RS485信號,此種信號通過RS485收發控制器轉換之后由主控制器讀取并作處理。主控制器對采集到的傳感器數據通過“加權平均法”、“移動平均法”等進行初步處理,去除一些冗余信息,將處理結果通過北斗通信模塊發送到北斗指揮型用戶機以便上位機軟件進行下一步分析處理,傳感器清洗模塊則定時對所有水質傳感器進行清洗,以確保每次采集水質數據的準確性。
2 系統軟件設計
水質監測系統軟件包括三部分:北斗通信協議、主控制器軟件程序、上位機軟件。北斗通信協議主要包括針對北斗短報文通信特點而特殊定制的通信協議;主控制器軟件程序主要包括傳感器數據讀取、傳感器探頭清洗和北斗通信等功能模塊之間的邏輯關系;上位機軟件用Java開發,主要實現水質數據接收、存儲、統計、分析以及實現人機交互和水質預警。
2.1 北斗通信協議設計
終端的短報文傳輸帶寬由用戶卡決定,與設備本身無關,以一個用戶卡為例,有兩個參數:傳輸容量和傳輸頻度。傳輸容量:7~120漢字/min,也就是說每條報文最大長度為120 B。傳輸頻度:1 次/min或2~3次/min,取決于ID卡級別。按每分鐘單向1次報文傳輸,每條短信報文100 B計算,單卡終端:6 KB/h,60 KB/10 h,144 KB/d[3]。與GPRS通信方式相比,使用北斗衛星的數據通信具有以下優點:覆蓋范圍大,沒有通信盲區。北斗系統覆蓋了中國及周邊國家,不僅可為中國服務,也可為周邊國家服務,特別適合集團用戶大范圍監控管理與數據采集和數據傳輸;北斗系統是我國自主研發的衛星通信系統,不但性價比高,而且具有安全性、可靠性、穩定性和保密性強的特點,適合關鍵部門應用[4]。
根據以上北斗短報文傳輸的特點和所受限制,結合水質數據采集的具體需求,本系統設計了一套簡單可行的短報文傳輸的可靠性算法,該算法簡單易行,具體實現思路如下:
(1)每個數據包包含水質采集站ID、數據類型標識、數據包校驗字節。
(2)發送方發送之前先暫存要發送的數據,發送之后在約定的超時時間內如果沒有收到確認收到數據的回復,就重發要發送的數據,如此循環發送三次,如若三次發送全部失敗則丟棄此包數據,轉而進入下一輪數據發送環節。
(3)北斗指揮型用戶機具備通播功能,可以對同一時間內接收到的所有采集站點的數據進行回復確認。
本系統設計了如表1所示的通信協議。
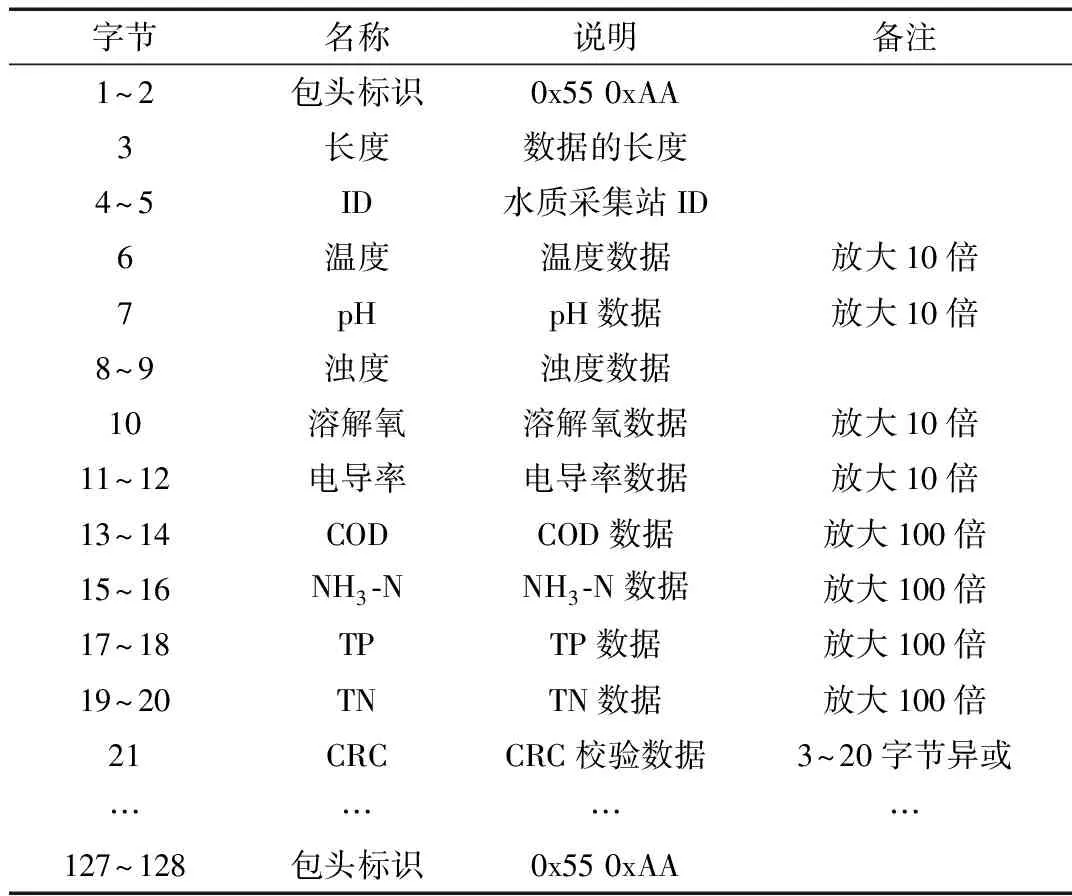
表1 北斗通信數據報文協議
應用此通信協議可以最大限度地使用民用北斗卡的服務頻度,在一次服務頻度周期內發送間隔10 s的6次采樣數據,10 s的水質數據刷新周期可以滿足大部分水質監測的應用。另一方面,北斗短報文通信具備雙向通信能力,可以接收北斗指揮機發送的配置指令,也可以配置水質數據采集周期、水質傳感器清洗間隔等參數。
2.2 系統軟件程序設計
水質數據采集終端主要包含水質傳感器、信號調理模塊、傳感器清洗模塊、北斗通信模塊。采集終端上電后,系統先初始化傳感器、北斗模塊以及其他接口,系統開始工作循環檢測北斗衛星信號,檢測到信號之后,每隔10 s讀取一次所有水質傳感器數據暫存,北斗用戶卡發送頻度1 min時間到達之后,把6次暫存的水質數據通過北斗發送到目標北斗指揮機。當水質數據采集周期比較長時(比如5 min一次),系統會在每次水質數據采集之后,將北斗等功耗較大的模塊進入睡眠模式,在下一次采集周期到來之前自動喚醒,以節約終端的功耗。
水質數據采集終端流程圖如圖2所示。
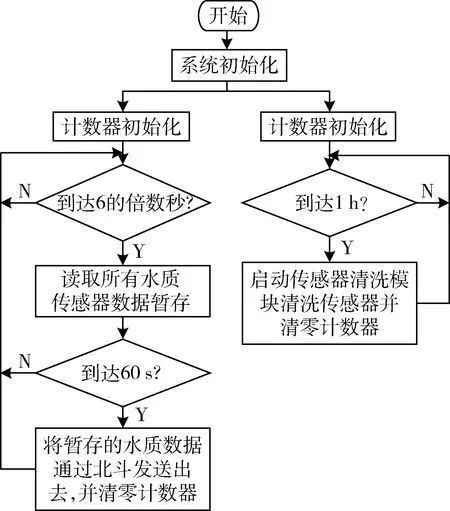
圖2 主控制器流程圖
2.3 上位機軟件設計
上位機軟件即是水質數據管理系統軟件,包含通信層、數據層、應用層三個部分[5]。
通信層模塊采用JavaScript開發,主要功能有兩個:一是讀取北斗指揮機接收到的各個水質采集站上報的水質數據,根據ID進行解析,添加時間等必要信息之后分類、存儲;二是接收配置參數指令,通過北斗指揮機發送給水質數據采集終端。
數據層模塊主要功能是實現水質數據的分類存儲與備份。
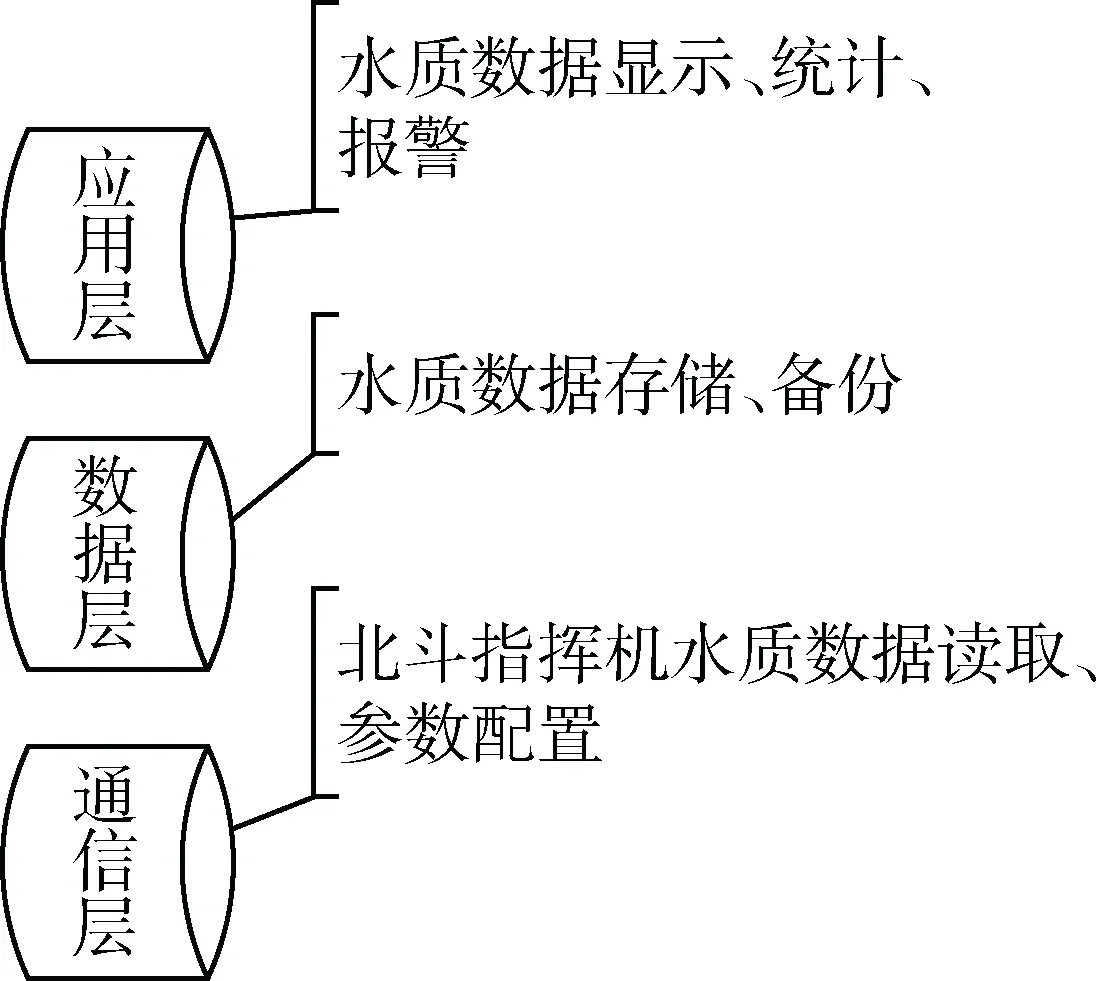
圖3 上位機軟件架構
應用層模塊包括人機交互、顯示各站點水質數據、采集站點參數配置、歷史水質數據查詢、水質數據報表打印、水質閾值報警等功能。
上位機的軟件架構如圖3所示。
3 部分系統硬件設計
3.1 數據采集單元
數據采集單元包含水質傳感器、信號調理單元、485總線收發單元。其結構框圖如圖4所示。

圖4 數據采集單元結構框圖
電源電路采用AOZ1284PI開關穩壓芯片將24 V電源電壓轉換為5 V電壓。采用AMS1117-3.3芯片將5 V轉為3.3 V。經過兩級降壓后,系統功耗大大降低,工作時的散熱也減小了很多,增加了系統穩定性[6]。
北斗模塊在發送信號的瞬間需要20 W的功率,保證穩定的電源供應是北斗模塊正常工作的先決條件。電源模塊電路如圖5所示,采用AOZ1284PI開關電源芯片將12~24 V電源電壓轉換成5 V電壓,此芯片最大可以達到5 A電流,且輸出電壓可調整(Vo=0.8×(1+R2/R1))。
I-V轉換電路如圖5所示。
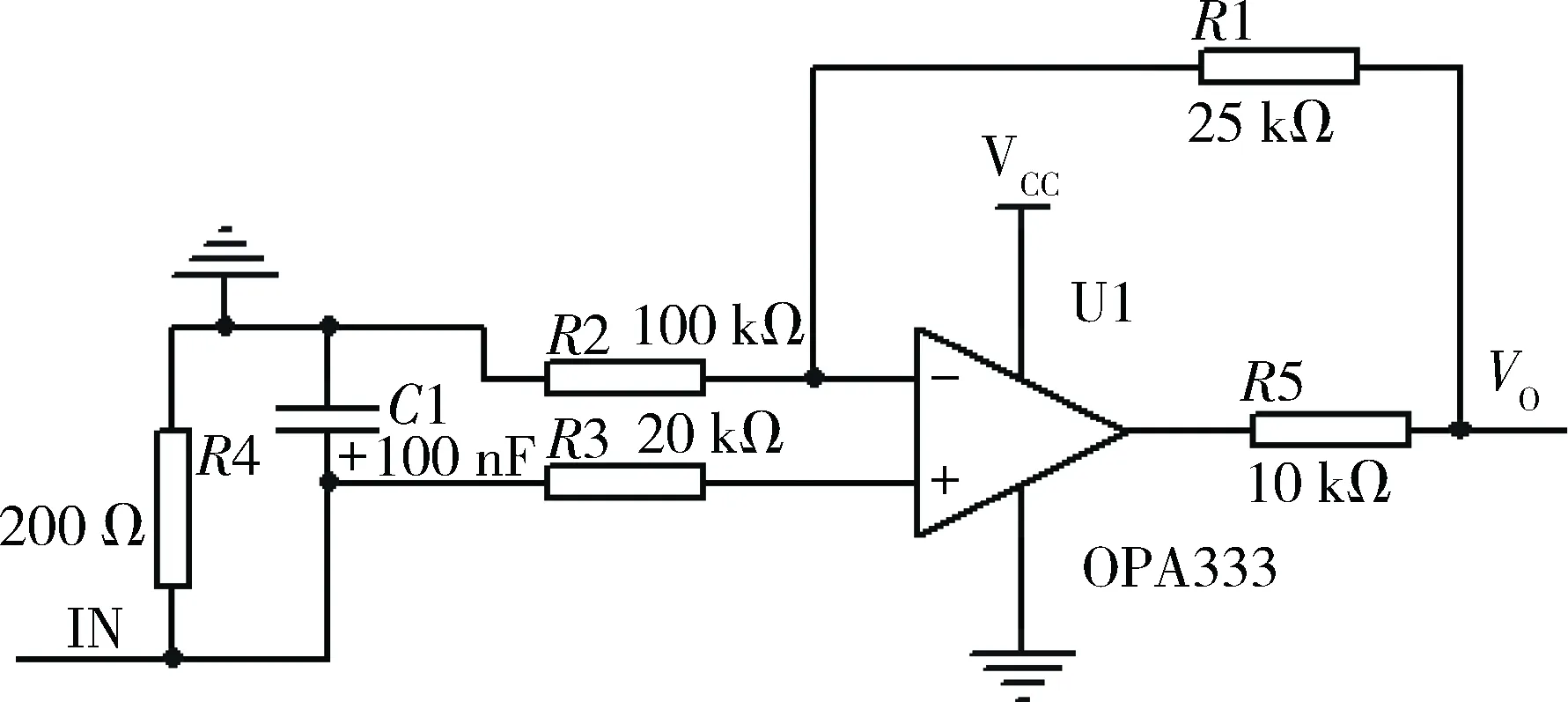
圖5 I-V轉換電路
溫度傳感器和pH傳感器的輸出信號為電流信號,通過圖5所示的I-V轉換電路轉換成電壓之后送到主控制器,主控制器對該信號進行濾波處理,完成信號采集、分析、存儲與轉發。該同相放大電路的放大倍數為:A=1+R4/R2。若按圖中參數取值,當輸入信號為4~20 mA時,輸出電壓為1~5 V。其中C1可以濾除輸入信號的波動,提高轉換的穩定性。
3.2 北斗傳輸模塊
本系統中采用的北斗模塊為GNS1531通信模組,該模組經低噪聲LNA放大所接收到的天線信號,由射頻收發芯片實現下變頻功能,將射頻信號變換到數字中頻信號,作為RDSS基帶芯片的數字中頻輸入。基帶芯片集成了10個獨立的數字接收機通道和1個發射通道,完成北斗RDSS基帶信號的接收和發射基帶信號的生成等功能。該模組通過標準的UART接口與主控制器通信[7],可以直接與MCU相連接,通過AT指令來控制數據的收發。
4 系統測試
為了驗證基于北斗短報文通信的水質監測系統的正確性與穩定性,在馬鞍山雨山湖和博望區博望河安置了5個采集站點進行測試。上位機軟件部署于帶有北斗用戶指揮機的服務器上,各個采集站點部署完成后將會定時上傳采集站點的水質數據。上報的部分水質數據如表2所示。

表2 采集站上報的部分水質數據表
在整個系統測試期間,組織專人對5個水質采集站點進行同步人工采集,將人工采集結果與在同一地點同一時間采集系統上報的結果進行對比。實驗結果表明,自動采集設備采集的結果與人工采集的結果基本一致,該系統能夠實現水質數據的遠程、穩定、正確傳輸。
5 結論
本文從軟件和硬件兩個方面設計了一種基于北斗短時通信服務的水質監測系統,描述了采集終端軟件功能及流程圖,部分硬件系統設計原理圖等,實現了對水質數據的遠程監測、存儲、顯示、統計等功能。該系統沒有通信盲區、不依賴基站通信、無后續流量費用,并且北斗系統由我國自主研發,安全性、可靠性、穩定性和保密性強。本系統對河道、湖泊的遠程數據采集、傳輸提供了一種科學有效的技術解決方案,具有很好的市場應用前景。下一步工作將會在降低系統功耗、減小采集系統體積、優化采集系統安裝、提高數據通信穩定性等方面進行改進,以擴展系統的應用范圍。
[1] 姜霞,鐘立香,王書航,等.巢湖水華暴發期水-沉積物界面溶解性氮形態的變化[J].中國環境科學,2009,29(11):1158-1163.
[2] 殷福才,張之源.巢湖富營養化研究進展[J].湖泊科學,2003,15(4):37-38.
[3] 龐瑜.基于北斗短報文通信的小水電站用電采集系統研究[D].長春:吉林大學,2016.
[4] 陳鋼.基于北斗的遠程水文監測系統[D].成都:西南石油大學,2013.
[5] 陳東升.基于GPRS的下水道氣體遠程監測系統設計[J].計算機測量與控制,2014,22(12):3932-3934.
[6] 張文建,趙路佳,吳鵬,等. 基于STM32的溫濕度變送器設計[J].計算機測量與控制,2016,24(4):287-290.
[7] 江蘇星宇芯聯電子科技有限公司.GNS1531型模塊用戶手冊[Z].2014.
猜你喜歡
環境(2023年5期)2023-06-30 01:20:01
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
當代水產(2019年1期)2019-05-16 02:42:04
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25