無人機在林業上的應用初探及操作實例
2018-01-24 14:19:52阮志華
綠色科技 2018年4期
阮志華


摘要:指出了傳統模式下的林業作業具有效率低、誤差率高等不足,并且作業監測盲區較多。無人機應用在林業上能有效避免傳統作業模式的缺點,提高林業作業效率。隨著我國綜合國力增強,無人機及其技術廣泛應用于社會生產中,無人機在林業上的應用也備受關注。基于此,以無人機及其技術為出發點,圍繞無人機在林業資源調查、森林巡護、林政執法、營造林檢查等方面的具體應用進行了闡述,并以大疆精靈4無人機在林業中的實際應用為例,就如何提高無人機在林業中的工作效率提出了一些建議。
關鍵詞:無人機;林業;應用;操作實例;注意事項
中圖分類號:S757.2
文獻標識碼:A
文章編號:1674-9944(2018)4-0227-04
1 引言
基層林業工作多依靠人工觀測采集數據,且多為定點監測,但林地通常面積大且地形復雜,而傳統的林業工作基本上是“一張圖,一支筆,兩條腿,一路走”的工作模式,效率極其低下,并且因作業監測盲區較多而導致錯誤率高,誤差率大,不再適應當前“精準林業”的時代需求。無人機應用在林業上能有效避免傳統工作模式的缺點,提高林業工作效率。近年來,無人機及其相關技術迅速發展,憑借其靈活性高、成本相對較低、操作相對簡便、采集數據更為快速精準的優勢,在林業資源調查、森林巡護、林政執法、營造林檢查等方面運用廣泛,并初步凸顯出先進、高效的特性[1],其應用必將成為趨勢。因此探索無人機在林業中的應用已成當前林業研究的重點課題。
2 無人機及其技術
2.1 無人機
無人駕駛飛行器是指無需駕駛員,通過程序或者通過操作人員遙感控制進行作業的飛機,簡稱為無人機。為了實現遠距離控制飛機,一般無人機上面配備了遙控、監測、衛星定位等大量系統,不同于載人飛機,它小巧便利、成本較低、環境適應力好[2]。
2.2 無人機技術
無人機技術的重點在于應用無人機。近年來,無人機技術迅速發展,現已應用于在各大領域并且成效顯著,例如影視制作、遙感測繪、電力巡檢、農業植保等。應用于林業時可根據中具體所需搭載諸如紅外掃描儀、多光譜成像儀等相應設備,無人機技術憑借其簡便的操作和較少的能源消耗,大大降低了作業風險、節約了時間、人力和物力[3]。
3 無人機在林業上的應用
無人機在林業中的應用即是使用無人機改變傳統以定點監測為主的人工與衛星結合的監測方式,通過無人機實時動態監測林業資源,對各項數據和信息進行綜合處理。
3.1 林業、林政執法
裝備紅外熱成像儀和可見光相機后,無人機可在固定范圍內的林地進行高頻次遙感監測,根據航拍影像,林業執法部門能夠及時發現林區中出現的違法行為,例如違法占地、盜砍濫伐、違章用火等;通過分析森林受損位置及程度,可及時制止和處罰毀林行為;應用正射影像技術工作人員獲取森林受災面積和受災程度,從而確定營造林所需面積及株樹。
3.2 森林巡護、森林病蟲害、森林火災監測及災后調查評估
無人機被廣泛應用于森林防火,森林火災是林業生產中影響重大的災害之一,而目前防火還是依靠衛星遙感技術。使用無人機搭載攝像設備和影像傳輸設備等即可輕松開展火災探測工作,無人機可將探測到的影像傳遞給工作人員,便于工作人員掌握火場情況,制定有效滅火措施,有效地降低火災帶來的危害。據近年來的實踐統計,無人機技術對森林火災的檢測率達到了88.6%,識別率達到了90.1%[4]。無人機還應用于病蟲害防治,同樣可依靠無人機監測發現發生病蟲害林地位置、面積等信息,從而預測發展趨勢并做災后評估,之后可以應用植保無人機對林地進行大面積病蟲害治理作業,亦可結合攝影測量軟件快速找到病死木、觀測有害生物,同時完成對森林病蟲害的精準施藥[5]。
3.3 森林資源調查、營造林成效檢查與動態監測
林區植被分布和生態環境評價常根據林區地表植被覆蓋率判定,森林資源調查成為重要的林業工作。此前,我國常用衛星遙感和人工采集兩種方法來統計植被覆蓋率,但衛星遙感成本較高、精度較低,人工采集工作量大、效率低下。而無人機憑借超強的靈活性根據不同需求設計飛行的區域、航線、高度等,這避免了傳統采集方式的缺點,同時提高了采集數字影像效率和監測的準確性,應用無人機技術檢測植被覆蓋率變化成為有效手段[6]。當前,我國已經將這一技術應用于研究部分珍貴林木覆蓋率。大量實踐證明,無人機遙感數據可以獲取林地面積、辨認樹種、確定林齡、計算林地密度等,采集到的數據較高的分辨率和時效性能有效提高工作質量,降低成本,從而提高林業調查的技術水平。
4 操作實例
以應用大疆精靈4無人機進行公益林驗收為例,對無人機在林業工作中的實際應用作進一步闡述。
4.1 精靈4無人機的優點
大疆精靈4無人機以其便攜性、易用性、廣泛性及穩定性等特點受行業應用者的青睞,并因此擁有眾多的應用程序支持,DJI GS Pro就是其中之一。DJI GS Pro( Ground Station Pro)是一款可控制DJI飛行器實現自主航線規劃及飛行的iPad專屬應用程序。GS Pro擁有直觀簡易的交互設計,能大幅提升各領域的任務執行效率,其中的測繪航拍區域模式可根據用戶設定的飛行區域以及飛行器相機參數、智能規劃飛行航線,執行航拍任務,并支持將航線任務保存至本地,將拍攝的照片導人PC端,利用Pix4Dmapper等3D重建軟件進行照片處理,之后可生成拍照區域的3D或者正射影像圖‘刀。
4.2 操作步驟
利用精靈4無人機進行公益林驗收就是通過使用DJI GS Pro軟件對公益林地進行區域航線規劃,設置好各項參數之后執行正射影像的航拍任務,航拍完成后將航拍的照片導入PC端,利用Pix4Dmapper軟件進行照片處理,生成TIF格式的正射影像圖,之后打開ArcMap軟件,將TIF影像和公益林數據添加到圖層中進行疊加,公益林地的信息就一覽無余了。相對于之前拿著圖紙到現場對圖驗收的方式,這樣的方法使驗收工作效率以及精準度都大大提高。其具體步驟如下。
4.2.1 外業工作
(1)選擇起飛地點。起飛地點的選擇至關重要,事關外業工作成敗。選擇原則首先是空曠地且視野開闊,這樣有利于信號傳輸及飛行安全;其次是要選擇任務區域的相對高海拔地點,因為無人機要拍攝的是正射影像,且圖像重復率均要求達到70%以上,而精靈4無人機限高,最高飛行相對高度是500 m,如果起飛點海拔越高,無人機與被拍攝區域的相對高差越大,就越容易達到圖像重復率的要求,否則就會導致內業處理失敗,整個工作得推倒重來。
(2)新建飛行任務及參數設置。起飛地點定好之后,打開DJI GS Pro軟件,安裝并連接無人機,在GSPro界面上選擇新建任務,再選擇測繪航拍區域模式和地圖點選模式,然后在地圖上點選任務區域,設定范圍之后對飛行任務參數進行設置。首先,設置飛行高度,一般來說飛行高度應根據任務范圍的大小進行改變,范圍越大,高度越高,反之亦然,本例直接設置飛行高度為500 m,因為飛行高度越高,拍攝范圍就越廣,就能越快的完成任務;其次,設置主航線上的圖像重復率為80%,主航線間的圖像重復率為70%,主航線角度跟隨任務區域的形狀進行調整,其他的參數默認即可[8](圖1)。
(3)執行飛行任務。設置好飛行參數之后,點擊DJI GS Pro界面右上角的飛機圖標,彈出準備飛行任務對話框,里面GPS、相機、電池以及任務完成后的動作等信息均有顯示,等待數據傳輸完成就可以開始執行飛行任務了,之后就是等待,期間若一顆電池無法完成飛行任務的話,系統會彈出提示窗口并要求自動返航降落,在更換好電池之后繼續執行飛行任務即可,任務完成后無人機根據預先設置要么自動返航,要么懸停等待下一步指令。
4.2.2 內業處理
(1)影像拼接輸出成果。影像拼接輸出成果的過程就相對簡單了。外業之后整理出任務區域的正射影像,電腦打開Pix4Dmapper軟件,新建項目,選擇所有正射影像圖片,打開,再選擇高精度處理模式,其他的默認即可,最后點擊開始按鈕,計算機就會對影像進行處理,最后生成3D云點模型以及TIF格式的拼接正射影像圖(圖2)。
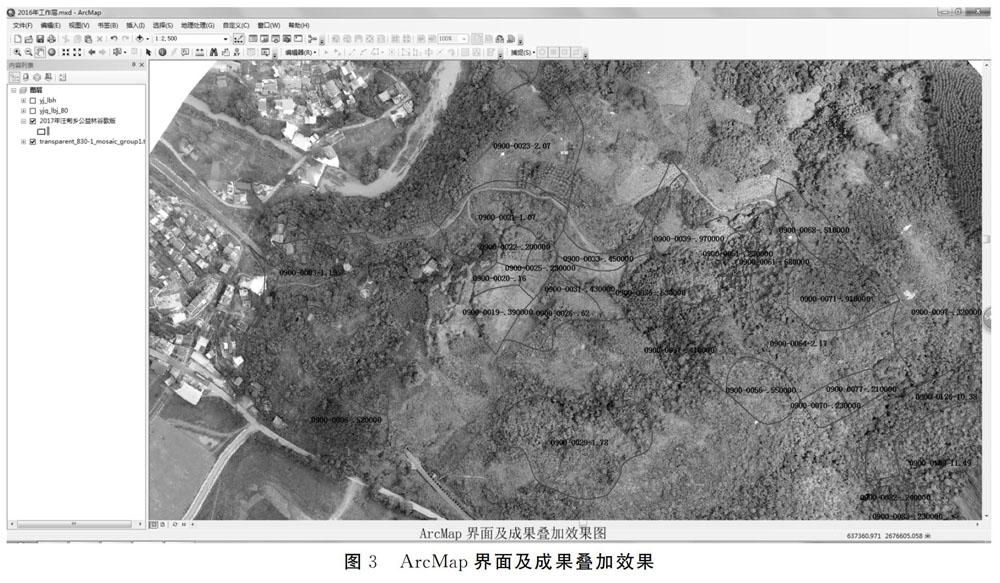
(2)成果數據疊加。成果數據疊加的目的是獲取公益林地的信息,并以此作為公益林地驗收是否合格的主要依據。首先打開ArcMap軟件,添加數據,選擇生成的TIF格式正射影像圖,待影像圖在ArcMap里顯示之后再繼續添加公益林圖層數據,添加成功后公益林地塊的信息便一覽無余了,工作人員可根據公益林的驗收方案和標準進行判斷其合格與否,之后填寫相關驗收圖表。至此,該項工作全部完成(圖3)。
4.3 實際操作過程中的注意事項
4.3.1 大疆應用程序DJI GS Pro與DJI G04的配合使用
DJI G04是大疆公司旗下集飛行、拍攝、編輯和分享為一體的移動應用。先用DJI G04連接無人機,對無人機硬件及周邊環境進行必要的安全檢查,并設置飛行高度、返航高度等重要參數,沒問題之后再切換到DJI GS Pro進行任務新建及參數設置等工作,目的是為了無人機飛行的安全與穩定。
4.3.2 無人機電池的充分利用問題
如若任務區域面積較大,需要用多組電池才能完成的情況下,如何有效利用電池,節約時間久尤為重要,筆者經上百次使用之后總結以下幾點供大家參考。
(1)起飛點與起測點的選擇。在起飛點與起測點的選擇上,兩者不要在同一個地點或者距離太近。如需要兩組電池的話就將起飛點設在任務區域的中部位置,需要三組電池的話將起飛點設在任務區域總長度1/3處,與起測點的距離約為任務區域總長度的1/3左右。這樣做的目的是為了便于無人機電池報警之后的返航,縮短返航距離,減少返航時間。在更換電池后也能讓無人機更快捷的到達起測點執行任務,減少電池損耗,將電池充分應用在任務的執行之上,條件允許的情況下,還可在更換上第二組電池執行任務之后將下一個起飛點移動到大約下個降落點之上,以此類推。
(2)兩個航點之間的距離保持。兩個航點之間的距離不要超過1000 m。因為無人機很有可能在飛到兩個航點中間位置以上時電池即將耗盡而報警并自動返航,這將導致這條航線上之前完成的那部分工作會在更換電池之后重新開始,重新開始意味著浪費電池浪費時間,而航點之間的距離越長,碰到這種情況之后所耗費的電池越多,時間成本越高。
(3)起測點前的飛行控制模式。在無人機從起飛點飛行到起測點的過程中,最好手動控制,讓無人機邊上升邊向起測點方向飛行,到達起測點后再點擊DJI GSPro界面上的飛機圖標開始執行飛行任務。這樣做的目的也是為了減少電池損耗,根據經驗數據,這比從起飛點就開始執行飛行任務能減少至少10%的電池損耗。因為從起飛點開始執行飛行任務時,無人機會先垂直上升至設置的飛行高度,再水平飛行到起測點開始執行任務,本身無人機垂直起飛或者降落的耗電量都是最大的,再加上飛行距離增加了30%以上,耗電量就可想而知了。
4.3.3 任務執行過程中無人機失聯的問題
任務執行過程中無人機失聯主要是因為飛行距離過長或者高山阻斷了信號所致,失聯狀態下,屏幕是黑的,無圖傳信號,看不到影像,各種信息參數,包括GPS位置、飛行速度高度均空白,這種情況下也不必慌張,因為DJI GS Pro設置失聯后繼續執行飛行任務,只要等待無人機飛行到合適的位置后恢復聯接即可,不要隨意控制、操作無人機,以免出錯,導致不必要的損失。
4.3.4 內業處理相關問題
首先,是Pix4Dmapper軟件所使用的文件夾及相關目錄不支持中文,必須全英文,否則無法打開相關文件。其次,是計算機在拼接影像時,如若有些影像重疊率達不到要求就會導致處理失敗,以致最終成果影像有缺邊、缺角、模糊或者空窗現象,若想獲得完整的拼接影像只能選擇更高海拔的起飛點重新執行飛行任務,獲得符合要求的影像之后再拿來進行內業處理方可。當然,這是針對大疆無人機限高500 m而言的,對于其他不限高或者固定翼的無人機而言,這一條可以忽略。最后,是坐標的問題,TIF格式的成果影像坐標是WGS84坐標,與國內常用的BJ54及XIAN80坐標有一定偏移,在ArcMap軟件里,要使其準確的重疊在一起,要么使用坐標轉換(較為復雜另述),要么根據經驗數據或者實驗數據計算偏移量進行糾偏,或者設定一到多個明顯地標物體進行糾偏使之匹配即可。
5 結語
無人機的優點顯而易見,高速、高效、精準。經過驗證,一臺配置三顆電池的精靈4無人機平均ld可以完成10000畝的飛行任務,而人工定點監測的話,要花5d時間左右,而且精準度還不高。當然,缺點也是顯而易見,主要是續航太短,監測設備昂貴、單一,應用不夠廣泛,與之配套的軟件及智能化水平略低,欠缺行業應用且專業性不強。但是,無人機應用是必然趨勢,隨著我國科技創新能力水平的不斷提高,無人機的發展也必將突破瓶頸,將我國的生態文明建設引入新時代。
參考文獻:
[1]夏新豐.淺談無人機在林業生產中的應用[J].林業科技情報,2015,47(2):40~41.
[2]王振師,周宇飛,李小川,等.無人機在森林防火中的應用分析[J].林業與環境科學,2016,32(1):31~35.
[3]文怡.無人機概念產品與時尚未來[J].今日科技,2015 (3):55~57.
[4]李濱,楊笑天,王宏宇,等.森林防火中無人機的應用現狀及發展趨勢[J].科技創新導報,2015,12(5):252~253.
[5]李德仁,李明.無人機遙感系統的研究進展與應用前景[J].武漢大學學報(信息科學版),2014,39(5):505~513.
[6]畢凱,李英成,丁曉波,等.輕小型無人機航攝技術現狀及發展趨勢[J].測繪通報,2015(3):27~48.
[7]孫志超,楊雪清,李超.小型無人機非測量相機在林業調查中的應用[J].研究林業資源管理,2017(2):103—109.
[8]周曉敏,趙力彬,張新利.低空無人機影像處理技術及方法探討[J].測繪與空間地理信息,2012,35(2):182~184.
猜你喜歡
今日農業(2021年12期)2021-11-28 15:49:26
少年博覽·小學低年級(2019年10期)2019-11-22 14:08:12
學生天地(2019年35期)2019-08-25 08:58:12
作文評點報·低幼版(2016年43期)2017-01-23 11:46:55
人間(2016年26期)2016-11-03 17:52:40
中國科技博覽(2016年22期)2016-11-01 18:10:31
科技視界(2016年22期)2016-10-18 14:30:27
科技視界(2016年20期)2016-09-29 12:03:12
科技視界(2016年20期)2016-09-29 11:47:01
科技視界(2016年20期)2016-09-29 11:02:20
