09型搗固車起撥道電路數據異常的控制研究
2018-01-15 07:11:10崔北祥
科學與財富 2017年21期
崔北祥
摘要:本論文就是對09型搗固車作業過程中問題的研究,提出建立搗固車起撥道電路數據監控,解決目前搗固車作業過程數據出現異常時產生錯誤的操作動作,造成鐵路工務線路質量出現大的偏差問題。論文對09型搗固車作業起撥道異常對現場應用帶來的較大風險隱患進行分析,提出管控措施,構建起撥道數據異常控制處理系統,實現作業過程起撥道異常數據監控,減少搗固車作業故障引發起撥道失控,并能做出相應的報警和控制操作。
關鍵詞:09型搗固車;起撥道;異常數據分析;過程監控
一、論文的研究背景及意義
1、論文研究的背景。
09系列搗固車是鐵路大型養路機械施工的主力車型,隨著鐵路提速和電氣化廣泛應用,線路作業后的軌控要求越來越高,尤其在一些客專和城際鐵路,必須在作業過程中保證萬無一失,但是搗固車在過程中可能出現故障和誤操作,造成起撥道電路數據出現異常大偏差值,給鐵路正常運輸生產帶來極大威脅,
2、建立09型系列搗固車起撥道數據異常監控的意義。
實現對09型搗固車起撥道狀態數據能夠準確測量,數據分析,對搗固車主要作業功能進行控制,減少出現因大型養路機械化作業帶來潛在重大風險,滿足鐵路運行安全可控的要求。
下面就對搗固車作業對線路質量產生重大影響的起撥道作業電路數據功能進行分析,并提出解決方案。
二、09型搗固車實現起撥道電路數據監控的思路
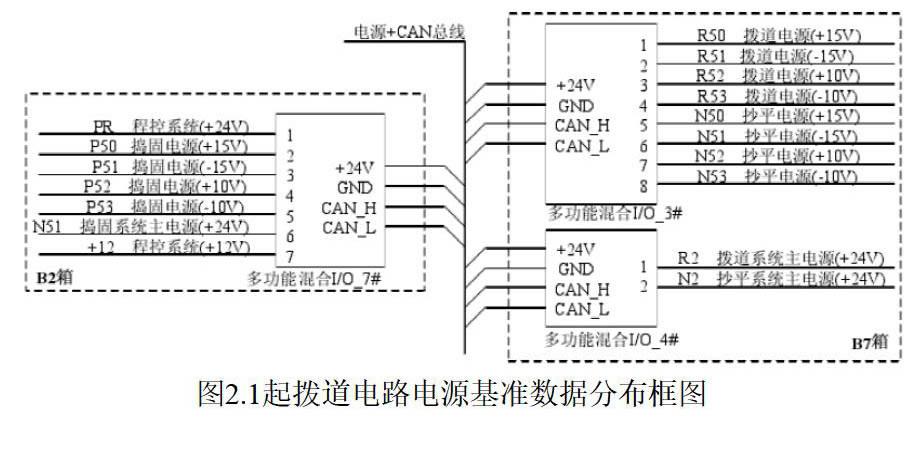
利用監控系統對起撥道電路前后兩次數據進行比較和存儲,輸出控制指令和報警語音提示。起撥道電路數據進行分析有兩種,一種是基準值固定電源電壓,基準值確定,通過計算機可以容易識別出異常值,如圖2.1所示;另外一種作業過程數據,也即起撥道量,是多數據在控制電路運算結果量,對線路作業結果有直接性影響,這也是數據控制的難點,本文重點對起撥道數據進行分析,構建起撥道監控系統,實現起撥道的控制。
控制原理是利用作業前后線路的平順要求,前后兩次作業量偏差必須一定限度內,在監控系統內對采集的起撥道電路數據前值對比,并及時對當前數據信息進行保存,當在下個循環可以被再次調取使用,當對比過程中判斷出起撥道電路數據異常時,輸出控制動作及報警提示。硬件部分可通過安裝在搗固車上的車載控制模塊,也可以對09型搗固車進行升級,增加起撥道數據監控功能,時時顯示整個搗固車系統的實時動態信息,起撥道控制過程原理一致,下文就以起道電路為例進行說明(如設定的基準值X、起撥道觸發信號產生時起道量電壓值Y、以及作業前后兩次電壓差值ΔYa等),利用這些動態的過程數據信息處理,實現對起道作業動態實時控制。在實際應用中可結合具體情況,安裝手動控制開關在控制面板箱上,實現對作業過程數據監控功能的轉換。
實現起道電路異常數據監控的過程:作業監控系統開始作業時,系統自動將初始值設為“0”,監控系統通過將當前量與系統初始值進行比較,判斷當前值是否超出監控系統設定范圍,如果超出,系統自動給出報警信號并停止起道作業,如果未超出則控制搗固車繼續進行搗固作業,并將當前起道量設為系統初始值,待下一個起道量進入系統時與其進行對比。這樣循環控制,以實現對起道系統的自動控制與報警提示,從而避免由于搗固車起道出現故障時的誤操作而造成損壞線路的險情出現。
三、起撥道差值計算控制實現方式
1、系統工作模式為:
首先設定當前起道初始值,一般起始工作時起道控制系統的設置的默認值為“0”;獲取當前撥道值,并將起道值與系統初始值進行對比計算,求出起道量ΔYa;根據起道量ΔY穢0斷系統能否是否超出控制的安全參數;超出,給出報警并提示作業人員:未超出,進行撥起作業,并將當前起道值設為初始值,進入下一個循環控制過程。
輸入信號:
手動輸入的前后兩次起道量的變化差值的范圍(0-200個)(輸入1個時表示50mv);
每次起道返回的值;
輸出信號:
1)手動輸入的值<(起道第N次值—起道第N—1次值)則輸出為0(含義為:不進行起道操作)反之則輸出1,進行起道作業;
2)同樣上述情況中,前面小于后面時,則使報警器繼電器連通進行報警,前面大于后面時,報警器不動作。
2、線路起道監控電路設計
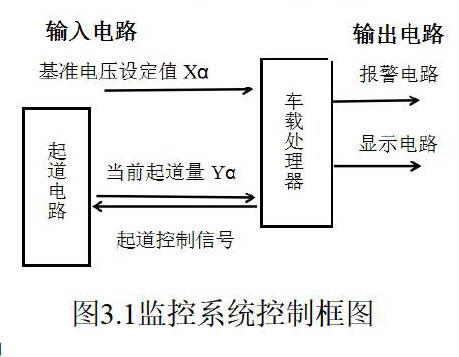
控制器通過輸出起道控制電路與控制報警電路兩路信號實現對線路起道的自動控制,如圖3.1所示。當起道電路相鄰兩輸入信號的起道差值大于設定值后,監控系統自動輸出控制信號,起道停止工作。
在控制起道停止工作的同時,輸出起道報警信號,觸發起道報警電路,輸出系統語音報警,實現線對整個起道系統的動態監控。
四.論文總結和展望
1、論文總結
1)論文在研究過程中重點對起撥道數據偏差進行了研究,還可以增加對作業后軌道電路變化情況進行監控;
2)數據采集點的選擇是發揮作用的關鍵點,應當避免對作業控制過程的干擾;
2、論文展望
1)隨著鐵路對自身安全控制的需要,09型搗固車廣泛應用,作業過程中異常數據受到全面控制的需求也會非常迫切;
2)通過搗固車作業系統功能升級,立足自身硬件條件就能實現數據的時時監控分析,完成自主控制。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
云南畫報(2021年12期)2021-03-08 00:50:54
北京測繪(2020年12期)2020-12-29 01:33:58
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
鐵道通信信號(2018年7期)2018-08-29 01:17:04
家庭影院技術(2017年9期)2017-09-26 03:41:45
故事大王(2016年7期)2016-09-22 17:30:08
通信電源技術(2016年4期)2016-04-04 02:58:04
工程建設與設計(2016年3期)2016-02-27 10:50:46