基于模糊控制電控空氣懸架車身高度控制策略研究
2018-01-15 03:16:18關欣
裝備制造技術 2017年11期
關鍵詞:模型
關 欣
隨著汽車技術的快速發展,電控空氣懸架越來越多地應用于汽車當中。為了提高汽車行駛的綜合性能,需要設計模糊控制器控制汽車行駛時的車身高度,使汽車高速行駛時,電控空氣懸架控制車身高度降低,以減小風的阻力,提高汽車的經濟性與穩定性。當汽車在顛簸的路面上行駛時,控制車身高度升高,提高車輛的通過性.
1 電控空氣懸架數學模型
電控空氣懸架主要由空氣壓縮機、儲氣罐、充氣閥、空氣彈簧、排氣閥、減震器組成。空氣懸架充氣時,ECU控制充氣閥打開排氣閥關閉,儲氣罐中的空氣充入到空氣彈簧中;空氣懸架排氣時,ECU控制排氣閥打開,充氣閥關閉,空氣彈簧中的空氣排入到大氣當中。
1.1 管路流量數學模型
空氣在空氣懸架中流經充排氣閥產生的空氣質量流量對空氣彈簧的非線性特性有著重要的影響[1],空氣質量流量公式如下:
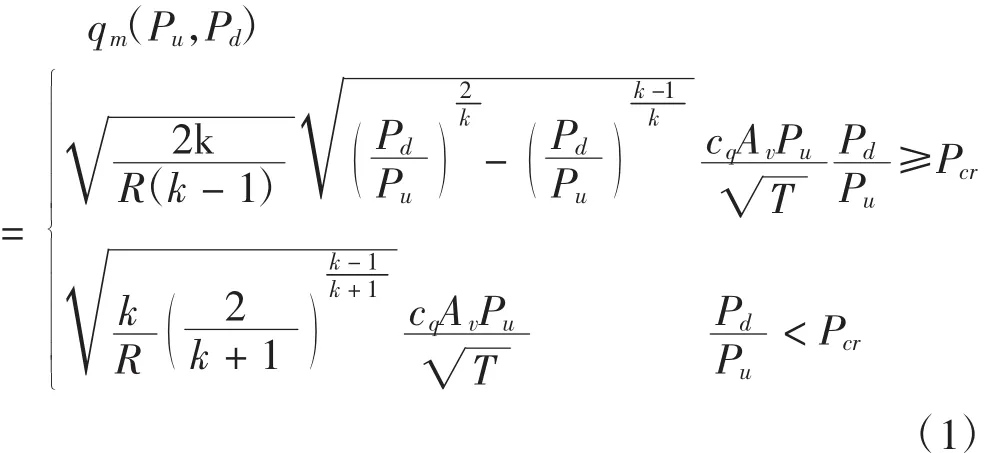
式中:R為氣體常數,cq為氣路流阻系數,Av為電磁閥等效截面積,T為氣體熱力學溫度。當充氣時,Pu為儲氣罐壓力,Pd為氣囊內絕對壓力。當排氣時,Pu為氣囊絕對壓力,Pd為大氣壓力,Pcr是臨界壓力比,對理想的氣體,取Pcr為0.528 2.
1.2 空氣壓力數學模型
根據文獻[2]充氣過程中,空氣彈簧的壓力模型為

式中:V(y)= V0+ βy,V0為空氣彈簧的初始體積,β為空氣彈簧體積變化率,y為空氣彈簧位移,v為空氣彈簧位移變化率。
排氣過程中,空氣彈簧的壓力模型為

1.3 空氣彈簧動力學數學模型
空氣彈簧在工作過程中,簧載質量受到氣體壓力、減振器阻尼力、重力以及慣性力作用。

式中:M為簧載質量,c為減振器阻尼。
1.4 電控空氣懸架系統Simulink模型
根據式(1)~(4)應用 Matlab/simulink 軟件建立電控空氣懸架系統模型如圖1所示。
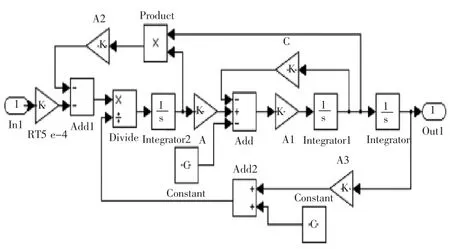
圖1 電控空氣懸架系統simulink模型
圖中輸入in1為中的空氣質量流量,輸出out1為車身高度。第一章中建立的模型均為數學模型,1.4中simulink模型為根據數學模型建立的,圖1中in1為空氣質量流量qm,add1口的輸出為公式(4)中的-kRTqmu-APv,out1輸出為車身高度x,A3模塊為β為空氣彈簧體積變化率,constant1為空氣彈簧的初始體積V0,計算得add2的輸出為V(y),所以Divide右端為dp/dt.intergrater2右端為p.模塊A為空氣彈簧截面積,constant為Mg,intergrater左端為垂向速度v,模塊 c為公式(4)中阻尼,模塊 A1為公式(4)中M,intergrator1左端為公式(4)中車身垂向加速度dv/dt.所以圖1為根據數學模型公式(1)~(4)建立的simulink模型。
2 模糊控制器的設計
由于空氣懸架充放氣過程是非線性的,車身高度的控制很難根據精確地用參數來實現。設計了適用于非線性控制、魯棒性能較好、不依賴精確物理參數的模糊控制器[3]。
模糊控制器的輸入變化量1為實際高度與目標高度的高度偏差e,輸入變化量2為高度偏差的變化率ec.輸出量為空氣懸架系統中流經管路的空氣質量流量。模糊控制器輸入輸出框圖如圖2所示。
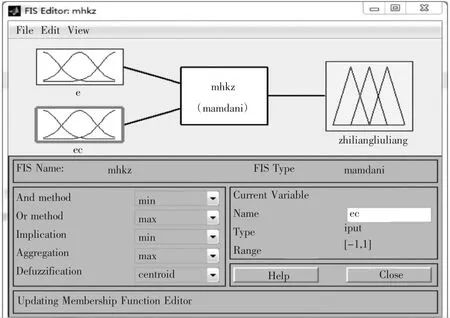
圖2 模糊控制器輸入輸出框圖
輸入變化量 1取 7個模糊子集{SS,S,SM,M,LM,L,LL}.高度偏差取值范圍為 0~0.03 m,論域為[0,3],量化因子為100.輸入變化量2取5個模糊子集{NL,NS,ZE,PS,PL},偏差變化率取值范圍為-0.1 m/s~0.1 m/s,論域為[-1,1],量化因子為 10.模糊控制器輸出量為空氣懸架系統中流經管路的空氣質量流量。輸出量取 7 個模糊子集{SS,S,SM,M,LM,L,LL}。輸出量取值范圍為 0-1×10-8,論域為[0,1],量化因子為1×10-8.
建立模糊控制的規則如表1所示。
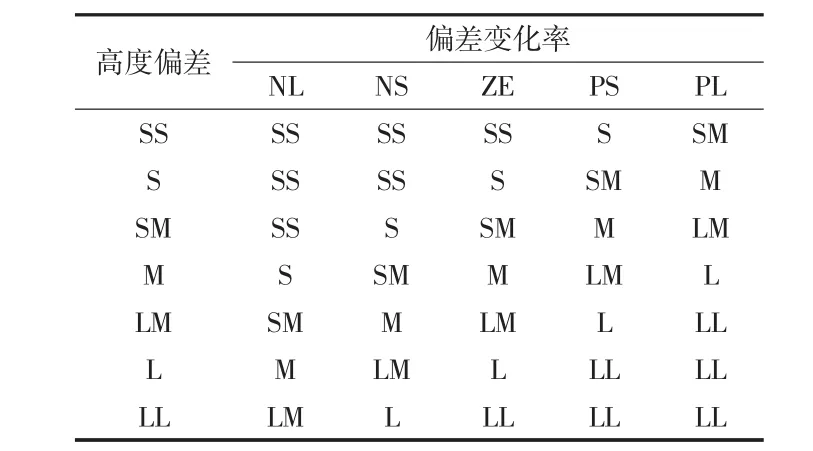
表1 模糊控制規則
3 系統仿真結果
應用Matlab/Simulink軟件對空氣懸架模型及模糊控制器建模仿真,模型如圖3所示。
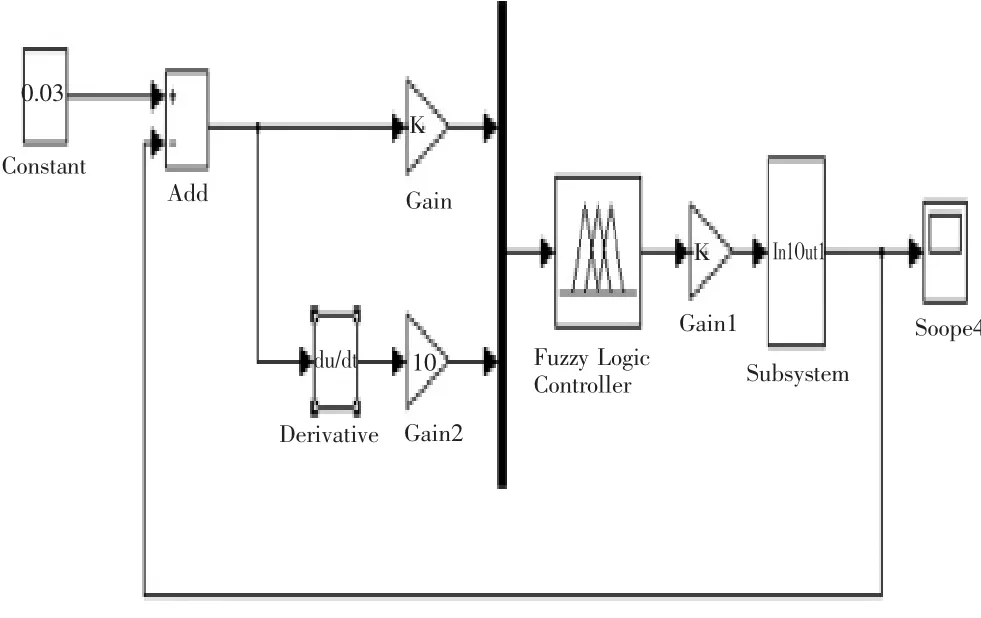
圖3 電控空氣懸架系統simulink仿真模型
圖3 中Fuzzy Logic Controller為所設計的模糊控制器,Subsystem 為根據公式(1)~(4)建立的電控空氣懸架模型。空氣懸架系統所采用的參數:簧上質量為328 kg,最大的減震器阻尼系數為3 500 N·s/m,空氣彈簧有效截面積為0.009 m2,空氣懸架容積變化率為0.046 m3/m,電池閥有效面積為0.000 004 m2,氣體熱力學溫度為293 K,氣體常數為287 J/(kg·K).見圖 4、圖5.
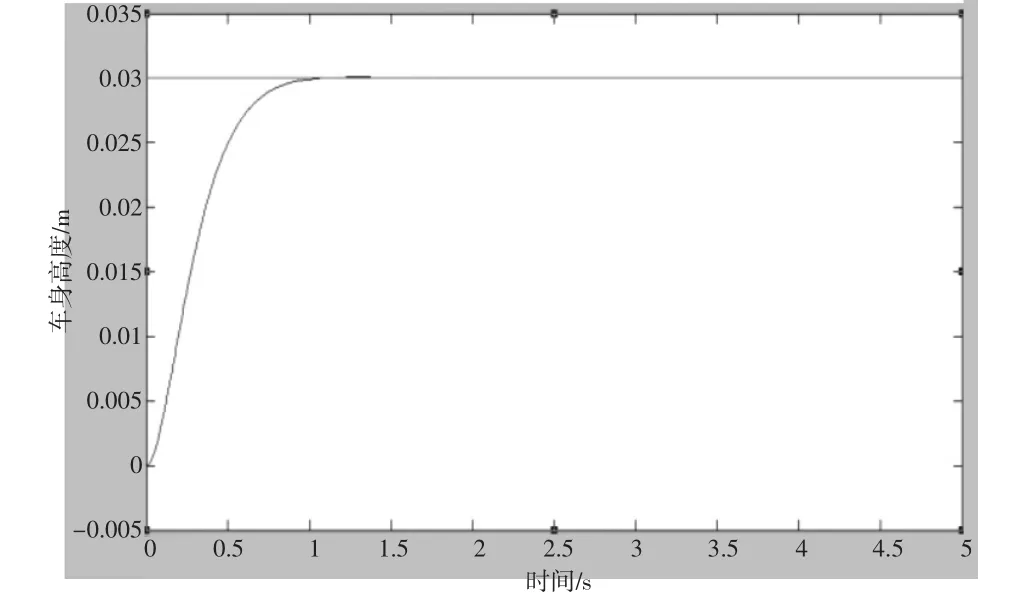
圖4 充氣過程車身高度控制響應
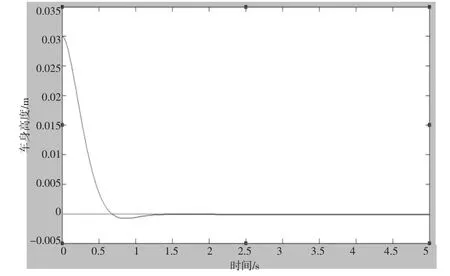
圖5 排氣過程車身高度控制響應
圖2 與圖3分別為模糊控制充氣與放氣時車身實際高度隨時間變化的響應。圖4為0 s開始,車身目標高度由“中位”0處變到“高位”0.03 m處,車身實際高度根據模糊控制規則也變化到“高位”處,經過1 s,車身高度達到目標高度,并保持穩定狀態。圖5為0 s開始時,車身目標高度由“高位”0.03 m降到“低位”0處,車身根據模糊控制規則也變化到“中位”處,經過0.7 s,車身達到目標高度處產生了微小的超調,1.2 s處,車身穩定在目標高度處。結果表明,模糊控制器能對車身高度穩定調節,且無過充過放現象。
4 結束語
本文針對汽車車身高度調節過程中,對電控空氣懸架進行充排氣,而產生的非線性特性,設計了模糊控制調節車身高度的方法。仿真結果表明,模糊控制適用于車身高度調節非線性控制當中,并能快速調節到目標高度并保持穩定,且超調量小,保證調節的精確性。
[1]Alberto Isidori.非線性控制系統[M].北京:電子工業出版社,2005:26-32.
[2]馮元元.半掛車電控空氣懸架系統的建模與控制仿真[D].廣州:華南理工大學,2011.
[3]Zdenko Kovaic,Stjepan Bogdan,模糊控制器設計理論與應用[M].北京:機械工業出版社,2010:7-17.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
