風(fēng)機葉片多點靜力加載試驗解耦控制方法研究
2018-01-15 03:15:56烏建中
裝備制造技術(shù) 2017年11期
烏建中,許 旺
風(fēng)機葉片作為風(fēng)力發(fā)電機組的核心部件之一,對其全尺寸結(jié)構(gòu)檢測等領(lǐng)域的研究顯得十分重要。根據(jù)IEC61400-23標(biāo)準(zhǔn),對于新研制或者工藝做出重大更改后的葉片,均需做靜力加載試驗,驗證葉片的靜強度儲備,并為剛度檢驗以及結(jié)構(gòu)優(yōu)化設(shè)計等提供必要的數(shù)據(jù)。多點靜力加載過程中,各個加載點之間存在交叉耦合情況,導(dǎo)致加載精度不高,需要有效的解耦控制算法以提高加載精度[1]。
本文詳細(xì)研究了變速積分PID解耦算法與神經(jīng)網(wǎng)絡(luò)變速積分PID解耦算法,并對這兩種算法進(jìn)行仿真分析以及現(xiàn)場試驗驗證;通過對比仿真與試驗結(jié)果,總結(jié)出兩種算法的適用范圍,據(jù)此針對不同的工況選擇合適的算法,保證靜力加載過程的順利進(jìn)行,為深入研究風(fēng)機葉片的性能打下基礎(chǔ)。
1 風(fēng)機葉片多點靜力加載解耦算法分析
1.1 風(fēng)機葉片多點靜力加載耦合分析
風(fēng)機葉片多點靜力加載是多個節(jié)點的作用力通過鋼絲繩同時作用在葉片上的一種等效加載方式,如圖1所示。

圖1 多點靜力加載裝置
根據(jù)IEC61400-23標(biāo)準(zhǔn),各加載點分別按最大載荷40%-60%-80%-100%-80%-60%-40%依次進(jìn)行逐級加載與卸載,其中在100%階段載荷持續(xù)時間至少10 s,如圖2左所示。由于葉片上各節(jié)點的夾具位置不同,以及葉片不同截面剛度等特性的差異,產(chǎn)生了不同節(jié)點之間載荷耦合情況。如圖3所示,風(fēng)機葉片在力F1作用下A點產(chǎn)生撓度△,當(dāng)F1、F2、F3同時作用時產(chǎn)生撓度y.即A點的撓度不僅僅與F1相關(guān),F(xiàn)2、F3也對其產(chǎn)生了影響。那么在沒有解耦控制算法情況下,多點靜力加載將產(chǎn)生非常嚴(yán)重的交聯(lián)耦合,嚴(yán)重影響葉片試驗的正常進(jìn)行,如圖2右所示[2]。
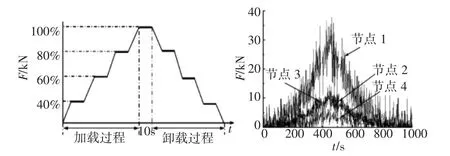
圖2 靜力加載階段曲線圖
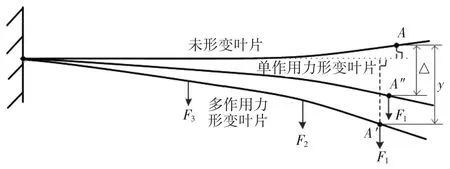
圖3 某一節(jié)點多點同時加載與單獨加載撓度示意圖
1.2 離散變速積分PID解耦算法
由于各加載節(jié)點存在交聯(lián)耦合的情況,需要設(shè)計一些算法來對整個加載過程進(jìn)行解耦控制。
傳統(tǒng)PID算法在實際載荷與目標(biāo)載荷誤差變化較大時,容易產(chǎn)生積分飽和作用,該作用會引起大幅度的超調(diào),使系統(tǒng)穩(wěn)定性下降。設(shè)法改變積分項的累加速度,使其與偏差大小相對應(yīng),即偏差越大,積分越慢,反之越快,以消除積分飽和情況。離散變速積分PID的積分項可表示為:

其中,v(k)為積分環(huán)節(jié)在采樣序列k時輸出的控制量。f(e(k+1))與e(k+1)的關(guān)系可以是線性的,也可以是非線性的。設(shè)

其中,a、b為常量,且a+b=1;r(k)為時間序列k時設(shè)定的輸入信號。則

據(jù)此離散變速積分PID解耦控制器結(jié)構(gòu)如圖4所示,系統(tǒng)輸入e(k)為反饋載荷與目標(biāo)載荷的差值,由公式(3)求得 u(k),經(jīng)過控制器控制輸出,得出反饋載荷。
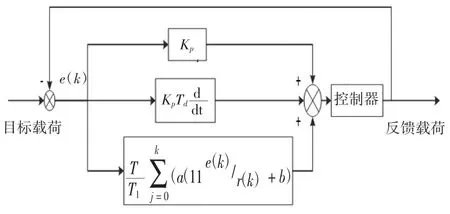
圖4 離散變速積分PID解耦控制器結(jié)構(gòu)
1.3 神經(jīng)網(wǎng)絡(luò)變速積分PID解耦算法
不同葉片以及葉片的不同加載方向性能差距較大,為了提高加載系統(tǒng)適應(yīng)不同葉片剛度變化的能力,采用了BP神經(jīng)網(wǎng)絡(luò)與PID相結(jié)合的方法,使用BP神經(jīng)網(wǎng)絡(luò)在線調(diào)整PID的比例系數(shù)。據(jù)此設(shè)計神經(jīng)網(wǎng)絡(luò)變速積分PID解耦控制器,如圖5所示。各節(jié)點輸入e(k)為反饋拉力與預(yù)設(shè)拉力之差,通過變速積分算法得到PID控制器的積分系數(shù)ki;同時,偏差e(k),累計偏差 Σe(k)以及偏差增量作△e(k)為 BP神經(jīng)網(wǎng)絡(luò)的三個輸入,經(jīng)過神經(jīng)網(wǎng)絡(luò)NN得到PID控制器的比例系數(shù)kp;由于該系統(tǒng)時滯較短,微分系數(shù)設(shè)為0.PID控制器輸出鋼絲繩的繩速,作用在葉片上,得到反饋拉力。BP神經(jīng)網(wǎng)絡(luò)變速積分PID解耦控制結(jié)構(gòu)框圖如圖5所示。
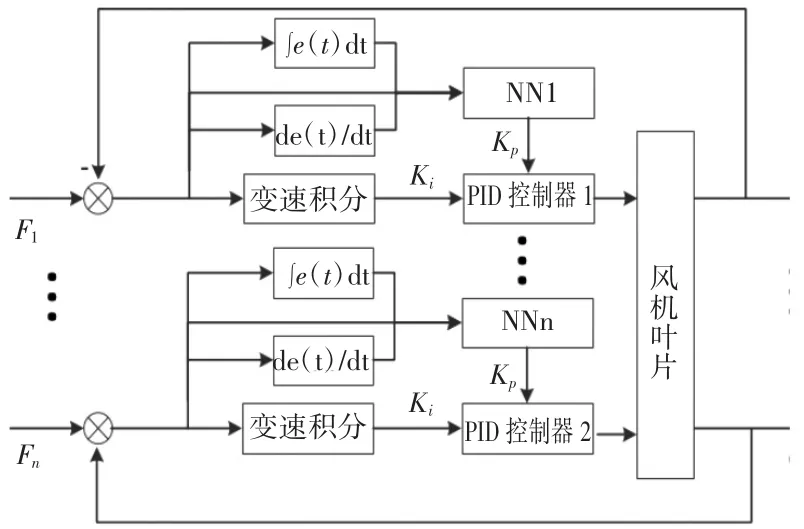
圖5 BP神經(jīng)網(wǎng)絡(luò)變速積分PID解耦控制結(jié)構(gòu)框圖
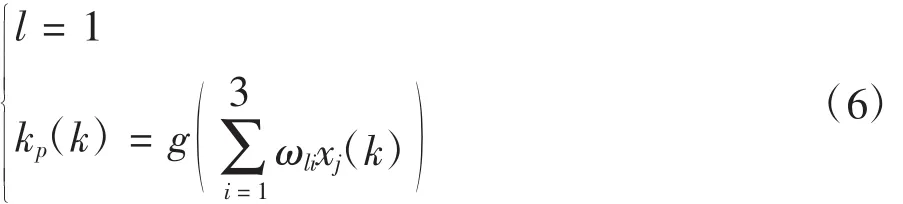
本文采用3×6×1的神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu),輸入層參數(shù) x1,x2,x3分別為偏差 e(k),累計偏差 Σe(k)以及偏差增量△e(k);輸出層的輸出為PID控制器的比例系數(shù)kp,如圖6所示。該算法由前向傳播算法和反向傳播算法兩部分組成,前向傳播根據(jù)各個神經(jīng)元中的激活函數(shù)以及各個神經(jīng)元連接權(quán)系數(shù)計算得出輸出結(jié)果kp,反向傳播根據(jù)該結(jié)果與預(yù)設(shè)結(jié)果的差值由后層網(wǎng)絡(luò)向前層網(wǎng)絡(luò)依次修改神經(jīng)元連接權(quán)系數(shù)。其中,隱含層激活函數(shù)f(x)=tanh(x);輸出層激活函數(shù) g(x)=0.5(1+tanh(x))。j,i,l分別表示輸入層、隱含層、輸出層神經(jīng)元序號。ωij為輸入層j號神經(jīng)元至隱含層i號神經(jīng)元的連接權(quán)系數(shù)。ωij為輸出層l號神經(jīng)元至隱含層i號神經(jīng)元的連接權(quán)系數(shù)[4]。
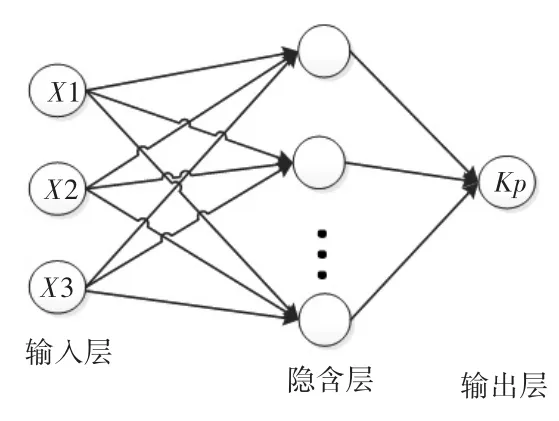
圖6 BP神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)圖
(1)前向傳播
1)輸入層輸入
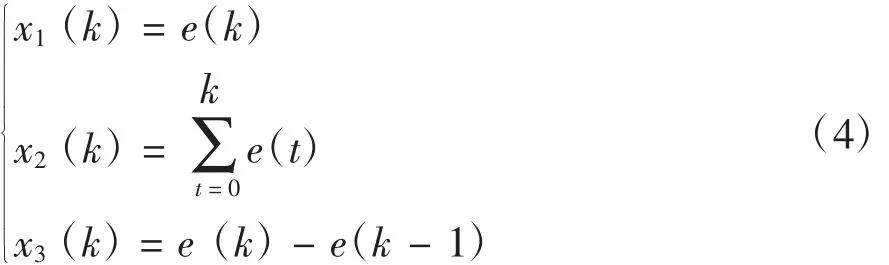
2)隱含層輸出yi(k)

3)輸出層輸出kp(k)
(2)反向傳播
用性能指標(biāo)函數(shù)JS來衡量加載系統(tǒng)性能的優(yōu)劣。

當(dāng)系統(tǒng)性能指標(biāo)函數(shù)值大于系統(tǒng)設(shè)定值,則系統(tǒng)進(jìn)行反向傳播,調(diào)整神經(jīng)元的連接權(quán)系數(shù)。例如取設(shè)定值為a,當(dāng)JS>a時按照梯度下降法調(diào)整神經(jīng)元的連接權(quán)系數(shù)ωij和ωli.
1)隱含層至輸出層神經(jīng)元連接權(quán)系數(shù)增量為△ω(lik):
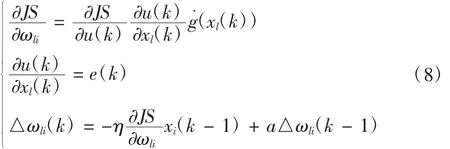
其中:η為學(xué)習(xí)速率。a△ωli(k-1)是為了加快全局收斂的附加慣性項,a為慣性項系數(shù)。
則神經(jīng)網(wǎng)絡(luò)輸出層至隱含層連接權(quán)系數(shù)的計算公式為:
2)輸入層至隱含層神經(jīng)元連接權(quán)系數(shù)增量為△ωij(k).
同上述方法,隱含層連接權(quán)系數(shù)的計算公式為:
2 風(fēng)機葉片多點靜力加載解耦算法仿真分析
風(fēng)機葉片多點靜力加載交聯(lián)耦合可用公式(11)表示:

其中:F矩陣為各節(jié)點加載力,矩陣為Y各加載點撓度,T為耦合矩陣。
以風(fēng)機葉片三點靜力加載為例,仿真初始條件如表1,表2所示。
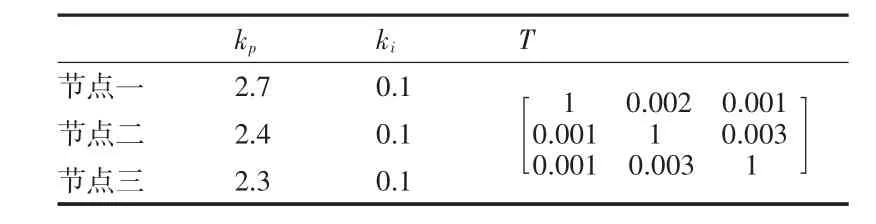
表1 工況一仿真初始條件
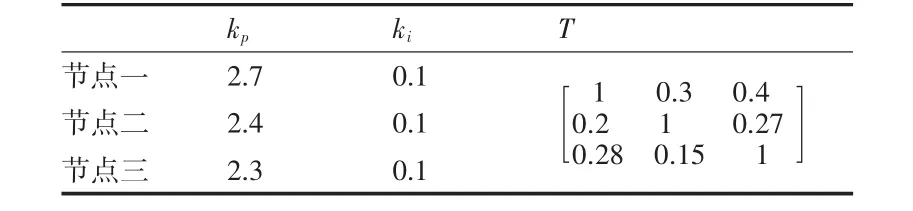
表2 工況二仿真初始條件
通過MATLAB建立葉片三點靜力加載變速積分PID解耦控制仿真模型,仿真結(jié)果如圖7、圖8所示。可以看出耦合情況變化不大時,變速積分PID解耦控制器可以很好地解耦,如圖7所示;當(dāng)耦合情況發(fā)生較大變化時,解耦效果不甚理想,如圖8所示。
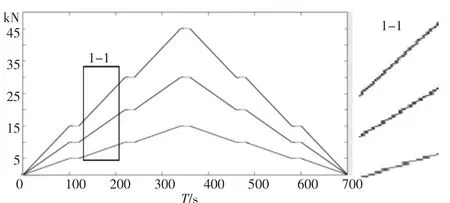
圖7 工況一解耦效果仿真曲線圖
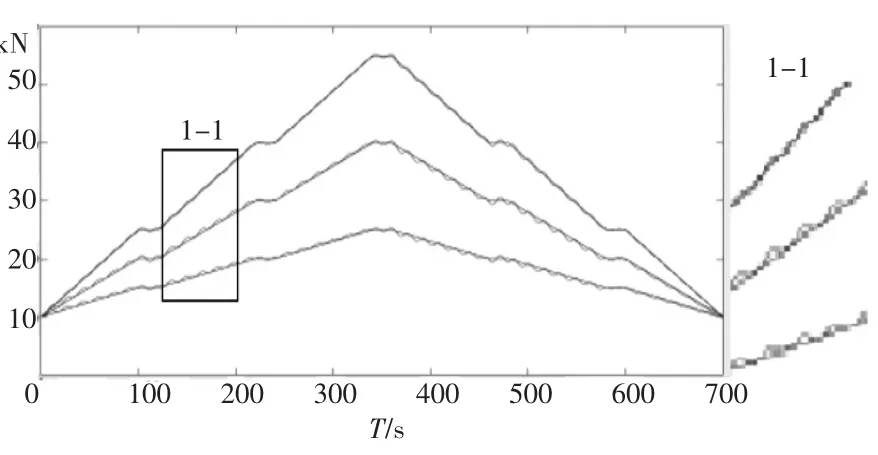
圖8 工況二解耦效果仿真曲線圖
建立葉片三點靜力加載BP神經(jīng)網(wǎng)絡(luò)變速積分PID解耦控制仿真模型,仿真結(jié)果如圖9、圖10所示。可以看出對于耦合情況變化不大時,BP神經(jīng)網(wǎng)絡(luò)變速積分PID解耦控制器可以很好的解耦,如圖9所示;當(dāng)耦合情況發(fā)生較大變化時,仍可獲得較好的解耦效果,如圖10所示。
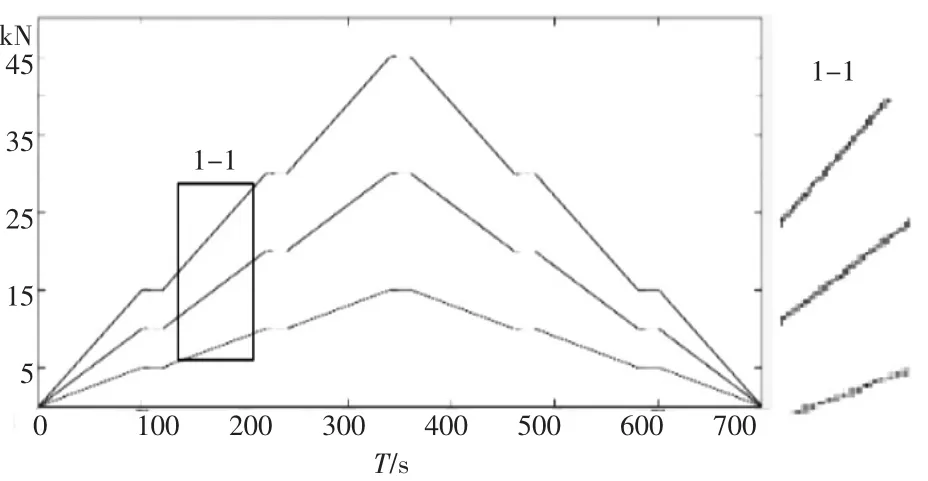
圖9 工況一解耦效果仿真曲線圖
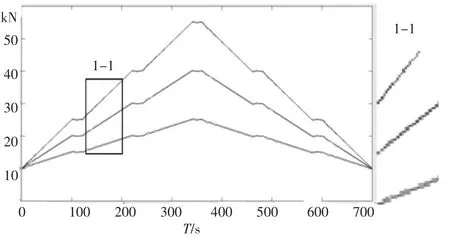
圖10 工況二解耦效果仿真曲線圖
3 風(fēng)機葉片多點靜力加載試驗與分析
基于本文提出的BP神經(jīng)網(wǎng)絡(luò)變速積分PID解耦控制算法,進(jìn)行了現(xiàn)場試驗,被加載葉片長度為53.8 m,分別進(jìn)行了葉片揮舞方向及擺振方向4點靜力加載,加載結(jié)果如圖11、圖12所示。現(xiàn)場實測試驗結(jié)果顯示,BP神經(jīng)網(wǎng)絡(luò)變速積分PID解耦控制算法在剛度變化較大的葉片揮舞方向與擺振方向都取得了良好的解耦效果,進(jìn)一步試驗表明,該算法在葉片不同加載點數(shù)、葉片不同加載方向等剛度變化較大的工況下都可以獲得較好的解耦效果。
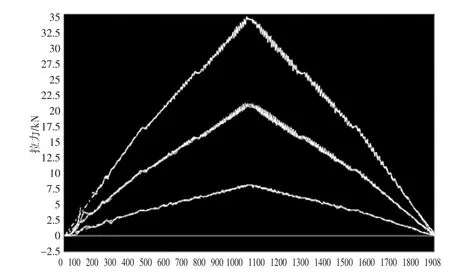
圖11 揮舞方向4點靜力加載結(jié)果曲線圖
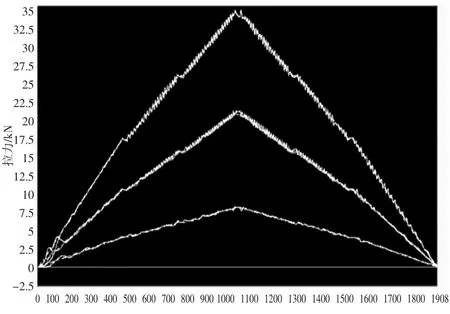
圖12 擺振方向4點靜力加載結(jié)果曲線圖
4 結(jié)束語
通過變速積分PID解耦算法與神經(jīng)網(wǎng)絡(luò)變速積分PID解耦算法的仿真分析與現(xiàn)場試驗驗證,得出以下結(jié)論:在風(fēng)機葉片多點靜力加載試驗中變速積分PID解耦算法可以在耦合情況變化不大的情況下獲得較好的解耦效果,而神經(jīng)網(wǎng)絡(luò)變速積分PID解耦算法可以在耦合情況變化較大的情況下依然可以獲得較好的解耦效果。
[1]烏建中,蔣時春.風(fēng)機葉片靜力加載電液控制系統(tǒng)研究[J].機電一體化,2014,0(04):23-27.
[2]張磊安,黃雪梅.風(fēng)電葉片全尺寸靜力試驗加載力協(xié)調(diào)控制算法[J].太陽能學(xué)報,2015,36(6):1418-1422.
[3]烏建中,范漢文.風(fēng)電機組葉片多點靜力加載神經(jīng)網(wǎng)絡(luò)PID解耦控制[J].風(fēng)能,2015(02):94:97.
