工程車輛多電機驅動系統同步協調控制策略
2018-01-15 03:15:54涂群章蔣成明傅中明張洪新
裝備制造技術 2017年11期
關鍵詞:控制策略
黃 皓,涂群章,蔣成明,傅中明,張洪新
0 引言
為適應工程車輛路況復雜、行駛載荷多變、機動性要求高的要求[1],同時滿足乘座舒適性,電傳動工程車輛的驅動方式正逐步由單電機驅動向多電機驅動方向發展[2],雙側電機獨立驅動是如今運用最多的電傳動方案(如法國“響尾蛇”地對空導彈車,德國的“黃鼠狼”步兵戰車,美國的M113兩棲裝甲運兵車等[3]),它具有傳動效率高、結構簡單、系統布置靈活等優點[4],但由于其兩側電機不存在機械連接,在直線行駛過程中,如果兩側電機受到的地面負載不同,會導致前輪兩側的速度不同步,將會產生車輛方向盤不受控制、跑偏、打滑等問題,這將影響車輛行駛的安全性和舒適性[5-6]。
在實際的多電機傳動工程車直線行駛工況中,能否實現在多變載荷工況下,多電機速度的同步協調控制,直接關系到車輛的安全性和舒適性,因而多電機系統的同步協調控制問題是該類車輛研發的一個急需解決的關鍵問題,目前逐漸成為國內外研究熱點[7]。為此,本文針對多電機同步協調控制的發展現狀,對多電機協同控制策略進行了論述[8-9],重點介紹和分析了:(1)經典控制策略,主要包括并行方式、主從方式、交叉耦合方式[10];(2)現代控制策略,主要包括偏差耦合控制和環形耦合控制[11];(3)智能控制策略,主要包括基于模糊控制器的同步控制和基于神經網絡的同步控制[12-13],探討了多電機同步控制的發展趨勢,為多電機傳動工程車輛行駛過程中速度協調控制技術研究提供借鑒。
1 經典控制策略
同步協調控制指的是按照工程要求,實現兩個或多個傳動軸之間的輸出值的協調控制。經典同步控制理論是在20世紀80年代由Y.Koren教授[14]和Robert.D.Lorenz教授[15]創立的,控制方式主要有并行方式、主從方式和交叉耦合方式。
1.1 并行控制策略
并行控制系統中,控制系統中所有單元共享一個控制信號,讓每個單元都有理想一致的輸出結果,從而使控制系統穩定性優良,動態性能好,并行控制結構圖如圖1所示。
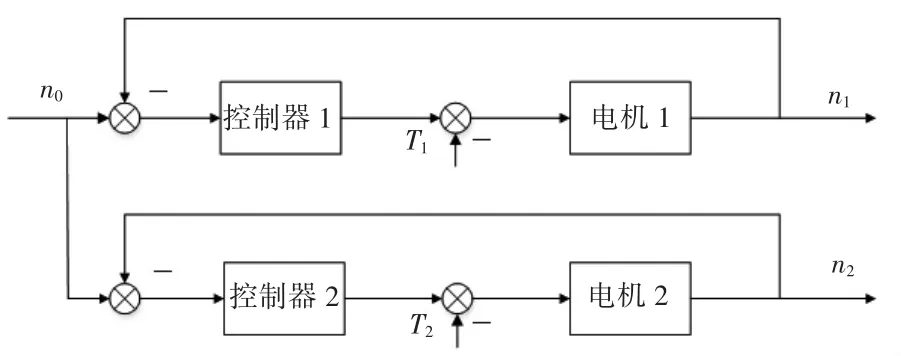
圖1 并行控制結構圖
并行控制結構簡單,運算較快,控制方便,但是它的缺點也很明顯,由于每個電機都是獨立控制的,當其中一臺或者多臺電機受到外界干擾時,這些電機轉速會發生變化,而其他電機由于是獨立控制的,不會受到影響,這就導致了控制系統失去了同步性[16],這在工程車輛路況復雜、行駛載荷多變的情況下,難以達到要求。
1.2 主從控制策略
以雙電機主從控制為例,主從控制系統結構圖如圖2所示。主電機的輸出轉速作為從電機的轉速的輸入參考值,從動機的輸出由主電機的輸出轉速控制,使之達到同步協調控制。在這種控制方法下,每個從電機單元都能準確快速的跟蹤參考值,實現良好的跟蹤性。
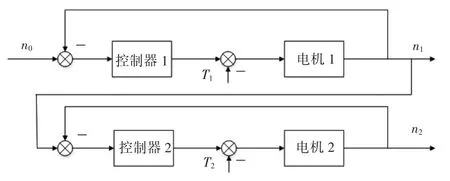
圖2 主從控制結構圖
從圖2可以看出,在主從控制結構下,將一臺電機作為主電機,主電機的輸出信號為參考信號控制從動機,理想情況下,能達到較好地同步效果,但是假設從動機收到外界負載的干擾,從動機的速度會發生改變,由于主動機不受從動機的控制,主電機的速度不會隨之改變,從而導致兩電機存在速度的誤差,無法達到理想的控制效果。
1.3 交叉耦合控制策略
交叉耦合控制策略是解決多電機同步協調控制十分有效的方法[15],主要運用于解決外界因速的影響對多電機造成的速度不同步問題,針對控制系統中各個對象建立耦合關系,實現系統的同步協調控制,這種控制方式能反映出任何一臺電機的負載變化,顯著提高了控制精度[6]。交叉耦合控制策略結構圖如圖3所示。
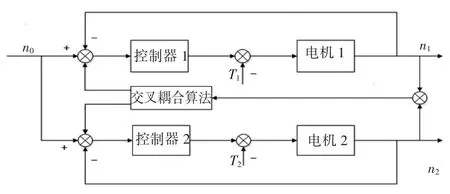
圖3 交叉耦合控制結構圖
交叉耦合同步控制策略在實際中已經開始運用,1990年美國俄亥俄州立大學的K.Srinivasan教授運用交叉耦合算法設計出了一種控制器[11],通過系統的運動軌跡斜率實時調整控制器參數,使控制器達到良好的時變性。
2 現代控制策略
隨著現代工業的飛速發展,對同步精度的要求越來越高,導致經典控制策略很難滿足日益遞增的精度要求,更高精度的控制策略需要被創建,導致現代控制策略在經典控制策略的基礎上發展出來,主要分為偏差耦合控制策略和環形耦合控制策略。
2.1 偏差耦合控制
針對上述提出的交叉耦合控制策略無法滿足三臺以上電機的穩定控制,人們研究出了偏差耦合控制,偏差耦合控制主要控制方法是通過比較各個電機的輸出速度進行補償反饋[17]。偏差耦合控制結構圖如圖4所示。
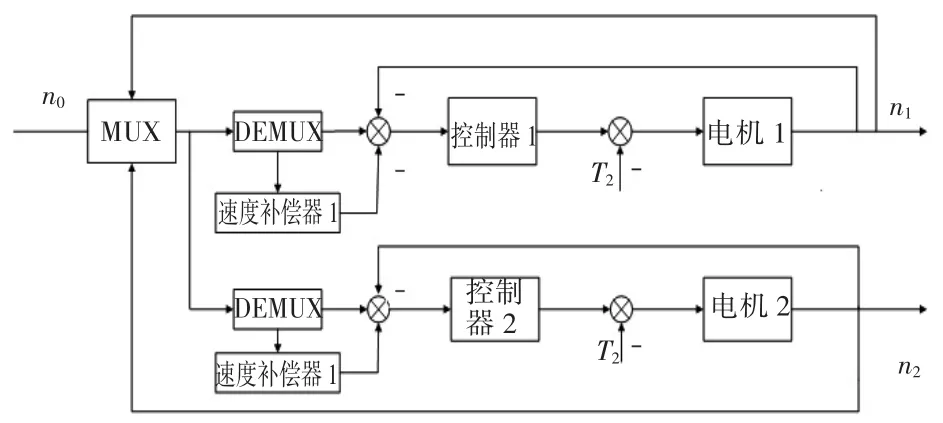
圖4 偏差耦合控制結構圖
偏差耦合控制相對于經典控制策略,克服了信號響應延時性大的缺點,同時適用于兩臺以上的多電機系統,響應迅速,誤差較小。西北工業大學[18]以多臺無刷直流電機為研究對象,采用偏差耦合控制策略協調系統的同步控制,在Matlab/Simulink中的仿真結果表明了偏差耦合控制策略控制效果優良、無超調現象、響應迅速。
2.2 環形耦合控制
環形耦合控制是利用各個單元之間的速度補償形成的現代控制策略。環形耦合控制方式同時考慮了被控對象的輸出與給定輸出之間的誤差關系以及相鄰單元之間的輸出誤差關系[19],環形耦合控制策略的結構圖如圖5所示。
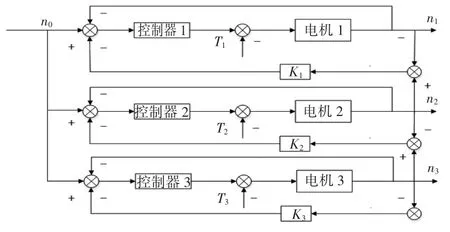
圖5 環形耦合控制結構圖
大連理工大學[20]在多電機的同步控制領域提出一種基于滑模變結構方法的環形耦合控制策略,經過仿真和實驗證明,這種控制方法在控制過程中不受外來干擾和自身參數影響,具有良好的抗干擾性和魯棒性。
3 智能控制策略
上述的經典控制策略和現代控制策略,在對控制系統設計的過程中必須建立精準的數學模型,但是工業控制中很多復雜的系統,數學模型難以建立,為了解決這類問題,人們將智能控制技術應用于控制器設計中[21],智能控制策略中運用較多的有基于模糊控制器的同步控制和基于神經網絡的同步控制。
3.1 基于模糊控制器的同步控制
模糊控制理論以模糊數學為基礎,用語言規則表示方法的先進算法技術,將模糊的數學模型利用語言方式表達出來[22-23],其基本結構如圖6所示。
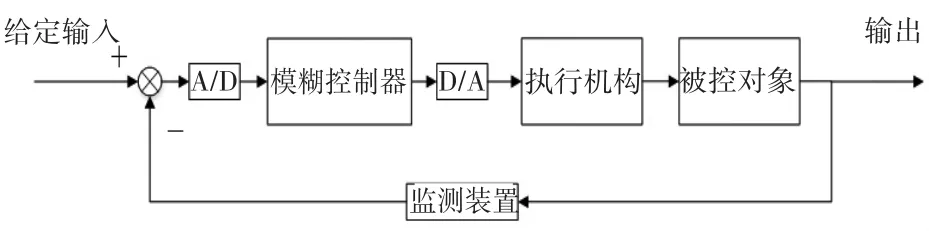
圖6 模糊控制系統
近年來,模糊技術逐漸運用于多電機同步協調控制,文獻[24]設計出了基于模糊控制器的改進耦合多電機同步控制,該控制器結構原理圖如圖7所示。
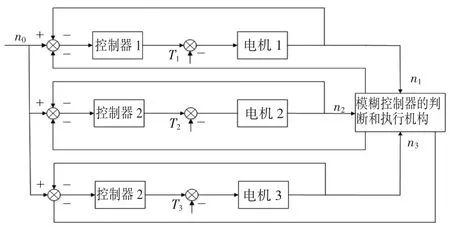
圖7 基于模糊控制器的改進耦合多電機同步控制系統
在該系統中,各個電機輸出速度之間的耦合關系依靠模糊控制器實現,將各個電機的輸出轉速輸入到模糊控制器中,根據制定的模糊規則確定各電機的補償速度,執行器再將補償速度反饋到各個電機[25-26],最終達到同步協調控制。
3.2 基于神經網絡的同步控制
神經網絡控制是20世紀80年代末期發展起來的自動控制領域的前沿學科之一,它是智能控制的一個新的分支。神經網絡控制主要由神經網絡結構、神經元模型、神經網絡學習方法三個內容組成[27-28]。
神經網絡神經元模型和生物神經元模型類似,可將其視為多輸入單輸出的模型[29],其模型如圖 8所示。
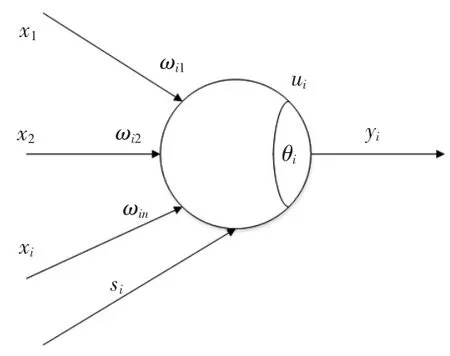
圖8 神經網絡神經元結構圖
圖 8 中,ui表示神經元的內部狀態,x1、x2……xn表示輸入信號,ωi1、ωi2……ωin表示連接權系數,si表示外部輸入信號[30]。神經元模型的數學形式可描敘為:

文獻[31]針對兩個電機的同步協調控制策略,以控制系統的轉速和張力作為輸入,提出一種基于神經網絡轉速和張力的解耦同步協調控制方案,利用RBF網絡整定PID控制器參數,這種控制系統具有良好的自適應性和魯棒性,其控制系統結構圖如圖9所示。
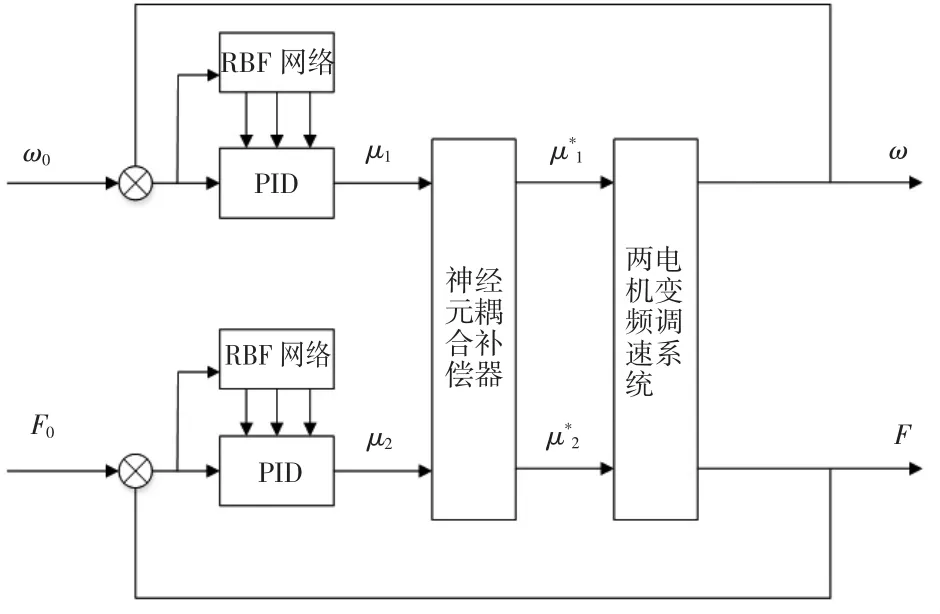
圖9 基于神經網絡二電機同步控制圖
圖中ω0、F0分別為期望電機轉速和載荷,ω、F分別為實際運行電機轉速和載荷,μ1、μ2為2個自適應PID控制器的輸出信號,通過神經元耦合補償器后的信號μ1、μ2作為兩電機變頻調速系統的輸入信號,采用該神經網絡控制方法能夠在保證兩臺電機速度同步的基礎上保證載荷F0的恒定,達到了速度和載荷的解耦控制,并且系統具有很好的動態性能[31]。
4 控制策略分析比較
上述控制方法均有優缺點,經典控制策略中并行控制實現簡單,操縱容易,但不適合電機受到外界干擾較大的情況。主從控制利用主電機作為控制電機,在理想情況下,可以保持很好的同步效果,但如果從動機收到外界負載的干擾,從動機的速度會隨之發生改變,然而主動機不受從動機的控制,主電機的速度不會隨之改變,而且主從控制在控制過程中會出現時滯性。交叉耦合控制能夠根據要求完成同步反饋控制,極大地提高了同步精度,但不適用于兩電機以上的多電機控制。
現代控制策略中偏差耦合控制采用閉環控制,加入偏差耦合控制策略協調各個電機的轉速,其不受電機數量的影響,具有同步性能好、響應速度快、超調量小以及魯棒性強等特點,但是由于結構較復雜,當電機數目較多時,系統的計算量會很大。環形耦合控制是主從控制上發展而來的,系統在啟停階段同步性能較好、響應速度快,但當其中任何一臺電機收到速度波動情況下,它就只能通過與之相鄰的電機將信號傳遞給其他電機,一旦數目較多,就會導致控制延時,從而使得系統的計算量較大。
在智能控制策略中,基于模糊控制器的改進耦合多電機同步系統根據各個電機來制定模糊規則,通過模糊推理來整定PID參數,通過仿真和模擬,與傳統控制相比具有跟蹤迅速、超調量小、單元輸出的實際轉速誤差魯棒性強等特點。神經網絡控制適用于多變量系統的解耦控制,無需測量和辨識被控多變量對象的內部結構和參數,可以得到良好的的解耦效果,但運算量大,控制算法十分復雜,不利于運用到實際工程實踐中。
5 發展趨勢
多電機同步協調控制具有良好的發展前景,近年來,多電機同步協調控制向著以下幾個方面發展與研究。
(1)良好的解耦控制性能。多電機同步控制性能直接受系統參數解耦性能影響,因此在多電機同步控制時要保證強解耦性。
(2)強抗干擾性。在實際運用場合,抗干擾能力是系統控制性能的重要參數,在輪式汽車實際運行的路面會發生各種變化,導致控制參數的漂移,這要求多電機同步協調控制系統具有較強的抗干擾性。
(3)良好的動態響應性。多電機同步控制系統能夠根據外界的變化快速達到穩定性,直接影響到多電機同步控制性能,這也是一項重要研究方向。
(4)較高的穩定性。控制系統穩定性是系統能夠正常運作的前提,能否提高穩定性,直接關系到系統能否正常運作。提高穩定性也是一項關鍵技術。
6 結束語
本文對多電機傳動工程車輛在直線行駛過程中,多電機同步協調控制的策略進行了研究,論述三種控制策略的原理、特點及實現方法。分析比較了各控制策略的優劣性,對多電機同步協調控制技術的主要問題及其發展進行展望,為電傳動工程車輛多電機同步控制系統的研發提供參考。
[1]嚴 糾.電傳動車輛的研究與發展[J].國外坦克,2006(2):44-46.
[2]孫文煥,程善美,王曉翔,等.多電機協調控制的發展[J].電氣傳動,1999(6):3-6.
[3]孫逢春,張承寧.裝甲車輛混合動力電傳動技術[M].北京:國防工業出版社,2008.
[4]朱茂林.多電機速度同步控制策略的研究與應用[D].合肥:合肥工業大學,2013.
[5]李 慧,劉星橋,李 景,等.多電機同步協調系統控制策略[J].電機與控制應用,2014(4):6-11.
[6]Chen S,Zhang K,Zhang W,et al.Design of multi-motor synchronous control system[C]//Control Conference,2010:3367-3371.
[7]Li M,Meng X.Analysis and Design of System for Multi-mo tor Synchronous Control[C]//Advances in Computer Science,Environment,Ecoinformatics,and Education-International Conference,Csee 2011,Wuhan,China,August 21-22,2011.Proceedings,2011:268-273.
[8]楊晨娜,張 怡.雙電機同步控制系統的設計與仿真[J].工業控制計算機,2009,22(1):36-37.
[9]Zhao W B,Zhu J H,Ji-Heng N I.Research of Multi-Mo tors Synchronous Control[J].Techniques of Automation&Ap plications,2012(4):189-195.
[10]Zhang P,Zhang J H,He D S,et al.Based on Adjacent Cross-Coupling of Multi-Motor Synchronous Drive[J].Ad vanced Materials Research,2011(201-203):1093-1097.
[11]Srinivasan K,Kulkarni P K.Cross-Coupled Control of Bi axial Feed Drive Servomechanisms[J].Journal of Dynamic Systems Measurement&Control,1990,112(2):225-232.
[12]張 莉,李彥明,馬培蓀,等.基于模糊PID控制器的多電機同步控制裝置的應用[J].工業儀表與自動化裝置,2003(4):11-13.
[13]Yun-Feng B I,Wang X.Multi-motors'Synchronization Control Based on Fuzzy Control[J].Machinery&Electronics,2008.
[14]Lorenz R D,Schmidt P B.Synchronized motion control for process automation[C]//Industry Applications Society Meet ing,1989.,Conference Record of the,2002(2):1693-1698.
[15]Koren Y.Cross-Coupled Biaxial Computer Controls for Manufacturing Systems[J].Journal of Dynamic Systems Mea surement&Control,1980,102(4):265-272.
[16]劉 艷.多電機同步控制系統控制策略研究[D].沈陽:沈陽工業大學,2013.
[17]彭曉燕,劉 威,張 強.基于改進型偏差耦合結構的多電機同步控制[J].湖南大學學報(自然科學版),2013,40(11):77-83.
[18]喻 鵬,齊 蓉.多無刷直流電動機偏差耦合同步控制[J].微特電機,2008,36(4):42-45.
[19]Sun J,Liu R,Luo Y,et al.Research on Multi-motor Syn chronization Control for Cutter Head of Shield Machine Based on the Ring Coupled Control Strategy[M].Springer Berlin Heidelberg,2009:345-354.
[20]劉 然,孫建忠,羅亞琴,等.基于環形耦合策略的多電機同步控制研究[J].控制與決策,2011,26(6):957-960.
[21]Fan Y.Improvement of multi-motor synchronous control strategy[J].Mechanical&Electrical Engineering Magazine,2007(108):1024-1028.
[22]Passino K M,Yurkovich S.Fuzzy Control[J].Tsinghua U niversity Press,2001,18(4):863-873.
[23]Zadeh L A.Fuzzy Logic[J].Computer,1988,21(4):83-93.
[24]Deng H,Liu H.Multi-motor synchronous control based on fuzzy support vector machine[C]//IEEE International Confer ence on Intelligent Computing and Intelligent Systems,2009:60-63.
[25]Su Y,Gang X.Research of Multi-motor Synchronous Driv ing System Based on Fuzzy Smith Control[C]//International Conference on Electrical and Control Engineering,2010:5466-5469.
[26]ztürk N, elik E.Speed control of permanent magnet syn chronous motors using fuzzy controller based on genetic algo rithms[J].International Journal of Electrical Power&Energy Systems,2012,43(1):889-898.
[27]Simon H.Neural Network:A Comprehensive Foundation[J].Prentice Hall PTR,1994,22(4):71-80.
[28]焦李成.神經網絡系統理論[M].西安:西北工業大學出版社,1990.
[29]袁曾任.人工神經元網絡及其應用[M].南寧:廣西科學技術出版社,1999.
[30]李俊麗,何 勇,王生澤.單神經元PID在多電機同步控制中的應用[J].機電工程,2010,27(8):14-18.
[31]樊衛華,趙國峰,陳慶偉,等.雙電機驅動伺服系統神經網絡控制器的設計[J].電機與控制學報,2006,10(3):260-264.
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36
