對標世界技能大賽培養機器人高技能人才助力中國制造2025
2018-01-15 03:15:52鄧三鵬祁宇明權利紅
裝備制造技術 2017年11期
鄧三鵬,祁宇明,權利紅
0 引言
世界技能大賽由世界技能組織舉辦,被譽為“技能奧林匹克”,是世界技能組織成員展示和交流職業技能的重要平臺。中國在第41屆首次參加收獲1枚銀牌,在第44屆世界技能大賽上獲得了15金、7銀、8銅和12個優勝獎的好成績,列金牌榜首位[1];其中移動機器人(Mobile Robotics)賽項獲得銅牌,實現了該賽項獎牌零的突破。為選拔優秀技能人才,培育工匠精神,促進機器人技能人才隊伍建設,推動國內技能競賽與世界技能大賽接軌,全國機械職業教育教學指導委員會、機械工業教育發展中心等單位聯合舉辦“2017年全國機械行業職業院校技能大賽-‘博諾杯’移動機器人競賽”,該賽項由天津博諾智創機器人技術有限公司等單位承辦,來自全國13個省市的86支代表隊參與了本次大賽的角逐。
1 賽項任務
競賽為團體賽,每組由2人組成,不僅考核參賽選手完成比賽任務的情況,而且還考驗選手對于機械、電氣、程序聯調的綜合水平,以及對編程方式、比賽策略的把握。競賽任務如下:
(1)完成移動機器人機械部分的安裝調試。保證運動部件運轉靈活,無卡阻、爬行現象,在運動過程中,電線不與其它零件發生碰擦,機械零件連接緊固、正確,電氣接線符合要求,裝配后美觀整潔,排線整齊。
(2)使用myRIO及攝像頭作為硬件,實現臺球的識別。掌握物體識別的方法,掌握一種適合的顏色識別算法,使用myRIO的視覺處理模塊并完成硬件的連接,進行不同臺球的區分。
(3)移動機器人在場地中遙控或自主尋找指定的臺球并抓取。完成手動遙控器與移動機器人的通信連接,考察通過硬件設備觀測地形的能力,以及機器人的路徑規劃策略,完成移動機器人的自主路徑規劃。
(4)自主搬運臺球通過場地的通道,將臺球放在指定圖形碼的存儲區內,并重復動作。完成移動機器人的直線、轉向以及平移運動,運用傳感器融合技術,保證移動機器人運動過程中的安全無碰撞。
2 大賽平臺
本次大賽的競賽平臺采用天津博諾智創機器人技術有限公司基于第44屆世界技能大賽研制的BNRT-MOB-44型智能移動機器人(如圖1所示)。該平臺由移動平臺、智能視覺系統、機械手爪、傳感系統、myRIO控制單元和通信六個模塊組成,其中包括攝像頭、絲杠、導軌、連接架、舵機、機械手、機架、超聲波傳感器、麥克納姆輪、伺服電機、滾珠滑塊等機構。
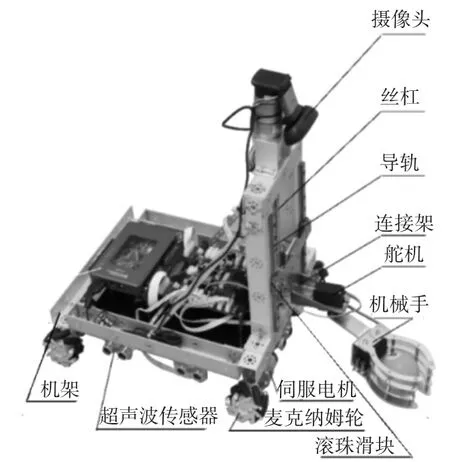
圖1 BNRT-MOB-44型智能移動機器人
工作場地為2 m×4 m地面平整的空間(如圖2所示);場地共分為臺球放置區1,走廊2,臺球散落區3、4和發球區5五個部分。
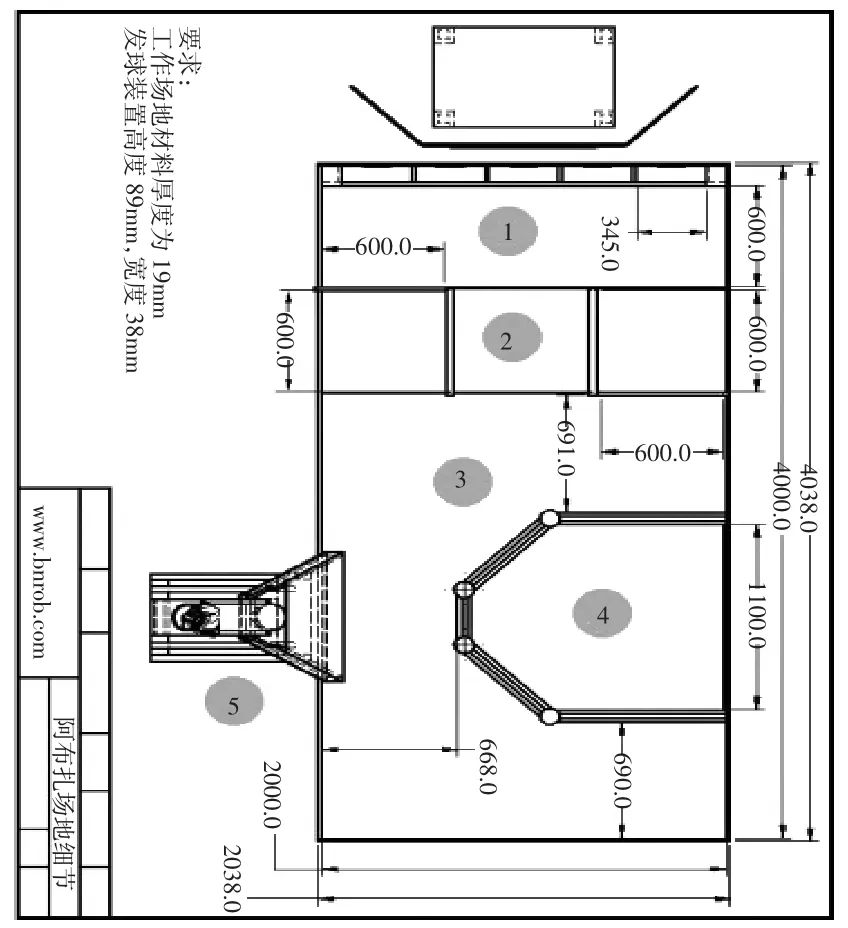
圖2 移動機器人運行工作場地
主要特點如下:
(1)路徑規劃與自主移動技術。移動機器人需要將指定的臺球抓取到其對應的圖案處,完成這一任務的核心是路徑規劃與自主移動技術。當移動機器人處在一個簡單或復雜、靜態或動態、已知或未知的環境中時,機器人的首要任務是按照一定的性能指標,基于環境感知,在避開障礙物的同時,搜索到一條從初始位置開始的實現其自身目的的最優或次優路徑,以最小或較小的消耗完成指定的任務。移動機器人做好路徑規劃后,在場地中自主移動,以找到對應的臺球。
(2)圖像處理以及顏色識別技術。在比賽過程中,移動機器人需要識別16種不同的物體。使用myRIO控制器的圖像處理模塊并配合LabVIEW的圖像編程模塊,區分出臺球不同的顏色以及圖案,并將這些數據反饋給主程序。圖像處理以及顏色識別技術在實際生產中應用地越來越廣泛,世界技能大賽移動機器人賽項將圖像處理的難度加大,由幾種顏色的區分發展到現在16種不同顏色以及圖案的處理。
(3)傳感器多源信息融合。移動機器人需要從起始位置出發,在不碰到走廊墻壁的前提下,沿著走廊墻壁行走,移動到達臺球散落處,將臺球抓取后移動至走廊入口處,在移動機器人移動的過程中,需要避免障礙物的碰撞。多傳感器集成與融合技術對環境和對象的復雜性、不確定性感知性很強,其具有互補性、冗余性、低成本性及實時性等優點,利用多個不同的傳感器完成信息的采集并實現信息的融合,大大提升了移動機器人的靈活性。
移動機器人采用美國NI的myRIO1900控制器為核心,使用LabVIEW作為開發工具,使得整個控制流程變得可視化圖形化,例如建立如圖3所示的移動機器人系統調試界面,在界面標題部分需寫有“2017年“博諾杯”移動機器人大賽”,并在Labview前面板相應設置各單元調試模塊。應用LabVIEW,開發速度明顯提高,LabVIEW強大的工具支持內部大量的例程模塊與函數包,使得不論是做控制還是做數據采集與處理分析都變得簡單快捷。

(續下圖)
(續上圖)
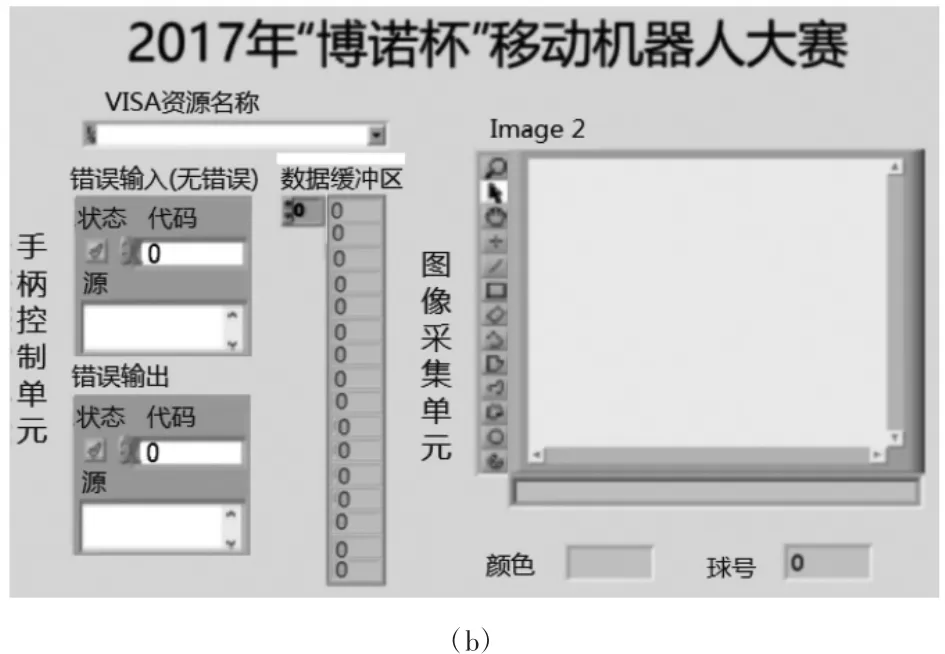
圖3 移動機器人系統調試界面設計
在強大的核心控制器與軟件平臺支持下,圖像識別,定位跟蹤和自主移動等機器人智能技術都可以輕松實現,移動機器人采用標準的鋁型材搭建,配以精巧的機械結構,搭載四個麥克納姆輪,與大量可選傳感器配合(攝像頭視覺,超聲波測距,紅外尋跡,灰度識別,紅外測距等),使得移動機器人能夠適應多種場地,完成多種綜合任務。
3 培養機器人技能型人才助力產業升級
移動機器人技術代表著現代機器人發展的前沿,在工業機器人中占有重要的比重,是中國制造2025重點發展領域中的重要組成部分,也是職業院校以及高等院校的教學重要環節。近年來,國內移動機器人產業表現出爆發性增長態勢,對移動機器人設計、維護、保養方面的專業技術人員的需求也不斷擴大,培養精通移動機器人技術的高水平人才也成為各大院校關注的重點問題。一直以來,天津博諾智創機器人技術有限公司以協助院校進行機器人及相關建設,提升人才職業能力素養為總體目標,充分發揮機器人產業發展優勢,以校企合作為支撐紐帶,不斷推動移動機器人技能型人才培養工作的開展。
3.1 移動機器人教材開發
基于LabVIEW2015-myRIO版編程軟件和智能移動機器人(BNRT-MOB-44)開發了教材《移動機器人技術應用》,通過剖析世界技能大賽移動機器人賽項闡述了移動機器人技術,從移動機器人世賽典型機器人搭建實例及調試、LabVIEW基礎、myRIO配置、myRIO應用、傳感器的通信與調試、LabVIEW拓展訓練、移動機器人世賽典型機器人控制等七部分來講述,按照“項目導入、任務驅動”的理念精選教學內容,內容全面綜合、深入淺出、循序漸進、實操性強,每個項目均含有典型的實施案例講解,兼顧移動機器人應用的實際情況和發展趨勢。
3.2 開展專業師資培訓
近幾年來,博諾機器人為國內眾多職業院校骨干教師提供專業培訓機會,先后開展了多期“機器人專業帶頭人領軍能力高級研修班”、“機器人骨干師資研修班”和“移動機器人技術研修班”,培訓學員達400多人。同時,博諾智創機器人技術有限公司還結合機器人競賽、工程應用、教學、科研和技能鑒定方面的豐富經驗,編撰了智能制造應用型人才培養叢書,有力支撐了機器人技能型人才培養的需求。
3.3 研發智能移動機器人助力產業升級
博諾機器人與天職師大機器人及智能裝備研究所合作研發出多款工業型智能移動機器人。如圖4所示為應用于工業環境物料轉運的智能AGV機器人。

圖4 智能AGV機器人
如圖5所示為災難環境下信息快速獲取空投機器人,利用GPS、慣性導航信號、手動遙控控制信號控制翼型傘實現機器人精準定點空投,克服了復雜環境的影響,使得機器人在第一時間空投進入災難現場。通過機器人攜帶的各種傳感器探測現場的情況,解決災害環境現場信息獲取問題。災難環境下信息快速獲取空投機器人可應用于地震、化工企業、海上平臺等突發災害現場。
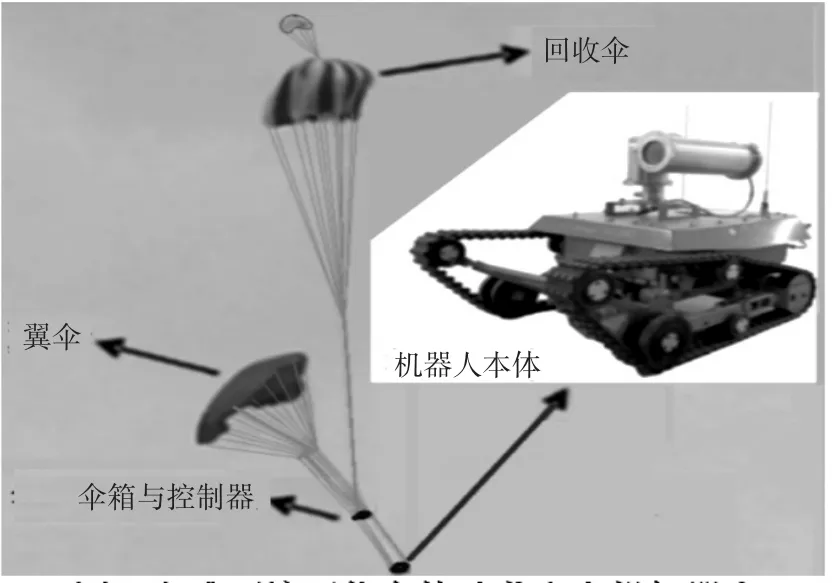
圖5 災難環境下信息快速獲取空投機器人
如圖6所示為儲油罐油泥清理機器人,以超高壓水射流為清洗源,基于現場控制裝置、油氣密度檢測裝置、信息反饋裝置以及多自由度機器人構建清潔體。儲油罐油泥清理機器人把作業人員位于儲油罐外安全的操作環境中,將清理模式、信息反饋有機統一,使得清灌工作安全化、簡單化、智能化,有效地解決了儲油罐清理中的諸多問題。

圖6 儲油罐油泥清理機器人
如圖7所示為基于超高壓水射流的混凝土破拆機器人,基于超高壓水射流研制的混凝土破拆機器人,水射流壓力范圍可達到120 MPa~400 MPa,混凝土破拆厚度大于200 mm,具備高能、冷態、點割的特點,破拆時不產生分層、無熱聚集、無熱影響區、無粉、煙塵污染等特點,提高了破拆質量,尤其是在易燃易爆的環境下,避免了造成二次災害。

圖7 基于超高壓水射流的混凝土破拆機器人
如圖8所示為基于雙目云臺和環境監測功能的履帶機器人,該履帶機器人具有雙目云臺控制功能,控制距離5 km;攝像頭升降功能;雙波段視頻成像功能系統;現場環境四參數反饋功能;監測環境有毒氣體;語音播報功能等功能,履帶式機器人可用于機器視覺研究、更強調應用,并且配備了高精度伺服控制和紅外、視覺、激光、超聲等傳感器,具有較高的教學和科研應用價值。
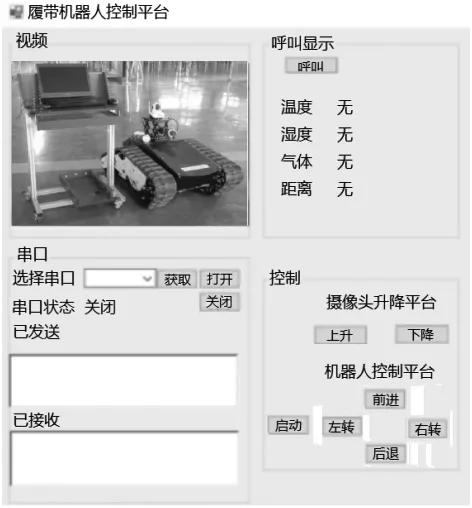
圖8 基于雙目云臺和環境監測功能的履帶機器人
4 結束語
為培養世界技能大賽移動機器人方面的人才,天津博諾智創機器人技術有限公司從設備研發、選手培訓到舉辦“博諾杯”移動機器人大賽,投入了大量的人力物力;一方面,讓移動機器人設備經受了各種考驗;另一方面,通過本次比賽,推動了智能制造的技術進步,加快了博諾機器人挺進“中國制造2025”的步伐,為智能制造人才培養添翼,打造智能制造教育裝備領先企業。天津博諾智創機器人技術有限公司將繼續堅持“政產學研用”的產品開發路線,專注于機器人及機器人技術為核心的教育裝備與自動化生產線相關產品的研發與產業化,踐行中國制造2025.
[1]15金7銀8銅!世界技能大賽中國代表團創歷史最佳[EB/OL].[2017-10-20].http://huaren.haiwainet.cn/n/2017/1020/c232657-31154550.html.
猜你喜歡
故事作文·高年級(2023年10期)2023-10-23 11:21:18
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
中國公路(2017年19期)2018-01-23 03:06:33
學苑創造·A版(2017年6期)2017-06-23 14:10:46
制造技術與機床(2017年3期)2017-06-23 08:11:21
Coco薇(2015年11期)2015-11-09 13:03:51
