基于LADRC的反滲透海水淡化溫控系統①
2018-01-11 01:59:40劉宏利劉世佳俞永江陳小奇
化工自動化及儀表 2017年12期
關鍵詞:系統
劉宏利 劉世佳 康 權 俞永江 邵 磊 李 季 陳小奇
(1.天津理工大學天津市復雜系統控制理論及應用重點實驗室;2.國家海洋局天津海水淡化與綜合利用研究所)
基于LADRC的反滲透海水淡化溫控系統①
劉宏利1劉世佳1康 權2俞永江2邵 磊1李 季1陳小奇1
(1.天津理工大學天津市復雜系統控制理論及應用重點實驗室;2.國家海洋局天津海水淡化與綜合利用研究所)
針對反滲透海水淡化系統中溫度參數的非線性、時變、遲滯及存在擾動等特點,采用線性自抗擾(LADRC)控制器建立反滲透海水淡化溫控系統。設計LADRC控制器可實現輸入對輸出的實時跟蹤和實時補償,并利用李雅普諾夫穩定性方法證明了該一階LADRC中二階線性擴張狀態觀測器LESO的穩定性問題。仿真結果表明:LADRC控制比PID控制響應速度更快,穩態精度更高,抗干擾能力更好,對整個系統穩定高效運行、降低系統能耗,有著重要的實用價值和研究意義。
反滲透 LADRC控制 LESO 溫度控制 李雅普諾夫穩定性
水資源短缺已經成為全球性問題,而海洋占地球上所有水的97%,所以海水淡化成為解決水資源匱乏最具發展前景的一種途徑[1]。海水淡化主要分為熱法和膜法,熱法主要為多效蒸餾和多級閃蒸,膜法主要為反滲透、電滲析和納濾[2]。而反滲透以投資省、能耗低(無相變)、建設周期短及占地少等優點,在全球海水淡化裝機總量中占主導地位。
反滲透海水淡化過程直接或間接地受到多種因素的影響,如操作壓力、操作溫度、水質、濃差極化、結垢程度及膜特性等。在這些因素中,工作溫度顯著地影響整個過程的性能[3]。因此,需要優化反滲透海水過程中的工作溫度,使它恒定保持在一個最優值,以提高反滲透海水淡化的整體效率,降低系統能耗。
常用控制算法為傳統PID控制,該控制方法結構簡單,但對溫度這樣的大時滯系統并不能達到很好的控制效果。還有PID與智能算法的結合,如模糊控制算法[4]、遺傳(GA)算法[5]及BP神經網絡算法[6]等,這些控制算法的穩態精度以及對擾動的抗擾控制效果并不好。筆者采用線性自抗擾控制器(LADRC)控制算法,對溫度能達到很好的穩態控制效果,抗干擾能力強,可為系統穩定高效運行提供保障。
1 反滲透海水淡化過程中的模型分析
反滲透過程中的溶解-擴散模型為[7]:
式中Aw、Bs——水滲透系數與鹽滲透系數;
Cjm、Cjp——反滲透膜在進料側和滲透側的鹽濃度;
Js、Jw——鹽滲透通量和水滲透通量;
Δp——膜層兩側的壓差;
Δπ——反滲透膜的滲透壓。
因為進料溫度增加不僅導致滲透壓Δπ增加,而且導致水的粘度降低。在反滲透海水淡化過程中,如果膜兩側壓差Δp是一個定值,則過程的凈驅動力(Δp-Δπ)會降低,水滲透通量也會降低。另外,水粘度降低,RO膜的滲透性增加。由于以上這些效應,在反滲透海水淡化過程中更高的溫度導致滲透流量和總溶解固體TDS增加[8]。因此,需要對溫度進行控制,使它保持在一個最優的恒定值,從而提高系統運行整體效率,降低系統能耗。
2 線性自抗擾控制器的設計
2.1 線性自抗擾控制器的基本控制思想
LADRC繼承了自抗擾控制器(ADRC)利用誤差反饋進行控制的思想,它省去了自抗擾控制器中的跟蹤微分器(TD),而且擴張狀態觀測器(ESO)和非線性誤差反饋(NSEF)都采用線性函數[9]。
一階線性自抗擾控制器的結構框圖如圖1所示,其被控對象的結構為單輸入單輸出(SISO)結構,框圖中的參數kp、b0和線性擴張狀態觀測器(LESO)中的參數ω0為3個待整定的控制參數。其中kp為比例常數,ω0為觀測器帶寬,b0為擾動補償因子。

圖1 一階線性自抗擾控制器結構框圖
LESO為狀態空間方程標準形式:
C=I2×2
D=02×2
其中,z為狀態觀測向量,z=[z1z2]T;y為系統輸出;u為系統輸入。
對于被控對象為一階的系統,通過調整3個控制參數(kp、ω0和b0)可以保證整個系統有界輸入有界輸出(BIBO)穩定。
2.2 基于LADRC的反滲透恒溫供水系統設計
考慮到該系統溫度參數具有時滯性,存在擾動等,采用LADRC控制器可以有效減少時滯對系統產生的影響,而且不需要精確的數學模型,還可以實時補償擾動。系統控制回路如圖2所示。

圖2 恒溫控制回路
2.3 穩定性分析
由圖1可知該算法是一個帶反饋的閉環控制算法,存在穩定性問題,針對文中的一階模型對它進行穩定性證明(在擾動給定的情況下)。
系統的LESO為:
(1)
L為觀測器增益向量,選取增益為:

(2)

(3)

定義李雅普諾夫函數V(ε)=εTPε,則:
(4)


(5)

(6)
根據李雅普諾夫漸進穩定性的意義,有:
(7)
LSEF采用的是P控制率,本文的控制率u0為:
u0=kp(v-z1)
(8)
式中kp——比例常數;
v——輸入值。
此時,u0是誤差反饋控制量,但并不包括對擾動估計值的補償。在上文已設計的二階 LESO的基礎上加入對擾動補償的考慮,最終的控制量u可取為:

(9)
由式(8)、(9)可得:
(10)
設e=v-y1,由式(10)得:

(11)
(12)
完整的線性自抗擾控制器中有跟蹤微分器這個環節,這個環節的作用是安排理想的過渡過程并給出過渡過程的微分信號[10]。但考慮到時滯對象本身就反應延遲,所以去掉跟蹤微分器。則系統變為:
(13)
式 (13) 寫成狀態空間的形式為:
(14)

對于穩定性的分析,得出線性自抗擾控制器穩定的條件,為參數整定提供了可靠的理論基礎[10]。
3 仿真與結果分析
搭建系統的Simulink仿真系統模型,將反滲透海水淡化系統中的溫度換熱過程抽象成一階慣性環節[11]:

式中Kw——系統放大倍數;
Tw——供水系統慣性時間常數;
τ——系統純滯后時間。
用階躍信號來模擬反滲透海水淡化過程中的溫度,根據現場實驗數據,取Kw=1、Tw=500對線性自抗擾控制器進行仿真,同時搭建PID控制,兩者進行對比。
LADRC和PID控制下的系統仿真結果如圖3所示。

圖3 LADRC和PID控制下的系統仿真結果
用白噪聲作擾動信號,系統仿真結果如圖4所示。
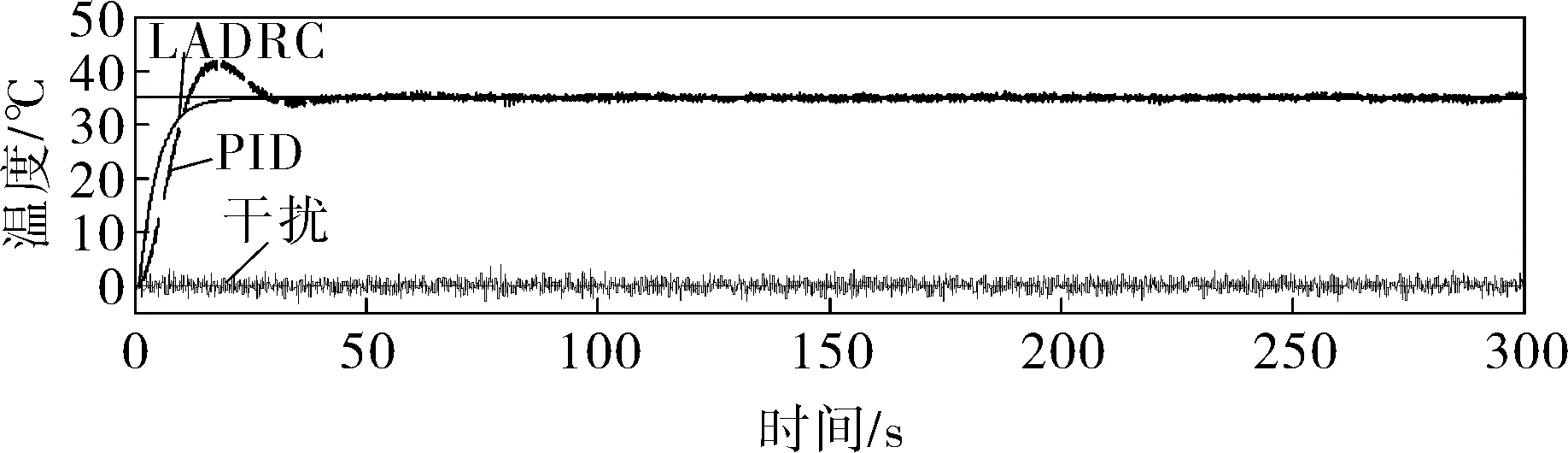
圖4 加入擾動后的仿真結果
從以上仿真結果可以看出,LADRC控制比PID控制達到穩態所用的時間短,過程中無超調現象,穩態精度高,加入擾動后PID控制波動較大,LADRC對干擾信號能實時作出補償,誤差在規定范圍之內,抗干擾能力強。
4 結束語
針對反滲透海水淡化溫控系統這樣一個非線性、大時滯的復雜控制系統,LADRC控制器對溫度的穩態控制更好,響應速度更快,穩態誤差小,可以使系統更快、更準地達到穩態,避免其他能耗,并且利用LESO對擾動進行實時估計,然后將它用于反饋控制中,達到快速消除擾動的目的,抗干擾能力強,滿足了反滲透海水淡化水溫控制的要求,為反滲透海水淡化系統穩定高效運行提供了保障,為系統能耗的降低提供了保障,具有較強的實用價值。
[1] 鄭智穎,李鳳臣,李倩,等.海水淡化技術應用研究及發展現狀[J].科學通報, 2016, 61(21):2344 ~ 2370.
[2] 滿曰南,王曉娟,王銀濤,等.海水淡化技術研究新進展和發展趨勢[J].工業水處理,2014, 34(11):8 ~ 12.
[3] 孫毅,鄭增建,單繼宏,等.基于船用反滲透海水淡化裝置的壓力與溫度參數優化[J].浙江工業大學學報,2016, 44(4):359 ~ 363.
[4] 趙陽,曲興華,李睿.基于模糊算法的自調整溫度控制系統[J].天津大學學報, 2011, 44(1):73 ~ 78.
[5] 傅曉云,方旭,楊鋼,等.基于遺傳算法的PID控制器設計及仿真[J].華中科技大學學報(自然科學版), 2012,40(5):1 ~ 5.
[6] 屈毅,寧鐸,賴展翅,等.溫室溫度控制系統的神經網絡 PID 控制[J].農業工程學報,2011, 27(2):307 ~ 311.
[7] 江愛朋,程文,王劍,等.全流程卷式反滲透海水淡化系統操作優化[J].化工學報,2014, 65(4):1333 ~ 1343.
[8] Seungjoon K, Younggeun L,Sanghoun O,et al.Energy Saving Methodology for the SWRO Desalination Process: Control of Operating Temperature and Pressure[J].Desalination,2009,247(1):260 ~ 270.
[9] 吳超,王浩文,張玉文,等.基于LADRC的無人直升機軌跡跟蹤[J].航空學報,2015, 36(2):473 ~ 483.
[10] 馬幼捷,趙健,周雪松,等.并聯混合型有源電力濾波器的線性自抗擾控制及穩定性分析[J].電網技術,2012, 36(11):211 ~ 216.
[11] 邢健峰,紀志成. 基于模糊PID的Smith預估堿液溫控系統[J].自動化及儀表,2014, 29(7):43 ~ 47.
TemperatureControlSystemforReverseOsmosisSeawaterDesalinationBasedonLADRC
LIU Hong-li1, LIU Shi-jia1, KANG Quan2, YU Yong-jiang2, SHAO Lei1, LI Ji1, CHEN Xiao-qi1
(1.TianjinKeyLaboratoryofControlTheory&ApplicationinComplicatedSystems,TianjinUniversityofTechnology; 2.SOATianjinInstituteofSeawaterDesalinationandMultipurposeUtilization)
Considering nonlinearity, time-varying, hysteresis and disturbance of the temperature parameters in reverse osmosis desalination system, adopting the linear active disturbance rejection control (LADRC) to establish a temperature control system for reverse osmosis searwater desalination was implemented, in which, having LADRC controller designed to realize real-time tracking and compensation of input to output, and the Lyapunov stability method adopted to prove stability of second order linear expansion state observer (LESO) in the first-order LADRC. The simulation results show that, the LADRC control outperforms the PID control in the response speed, steady-state precision and anti-interference abilities. It has practical value and significance in investigating the whole system’s steady and efficient operation and reducing the energy consumption of the system.
RO, LADRC control, LESO, temperature control, Liapunov stability
天津市科技計劃項目(15ZXZNGX00140);天津市應用基礎研究計劃項目(16JCTPJC49400)。
劉宏利(1975-),副教授,從事控制科學與工程、檢測技術與自動化裝置、物聯網和自主機器人的研究。
聯系人劉世佳(1993-),碩士研究生,從事控制科學與工程、檢測技術與自動化裝置、物聯網和自主機器人的研究,984875777@qq.com。
TH865
A
1000-3932(2017)12-1106-04
2017-08-10,
2017-10-31)
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
