一種基于機載三通道SAR的艦船成像方法
2018-01-09 00:42:52夏慧婷黃翔飛
雷達科學與技術 2017年1期
關鍵詞:信號
夏慧婷,李 勇,黃翔飛
(1.南京航空航天大學電子信息工程學院,江蘇南京211106;2.雷達成像與微波光子技術教育部重點實驗室(南京航空航天大學),江蘇南京211106)
一種基于機載三通道SAR的艦船成像方法
夏慧婷1,2,李 勇1,2,黃翔飛1,2
(1.南京航空航天大學電子信息工程學院,江蘇南京211106;2.雷達成像與微波光子技術教育部重點實驗室(南京航空航天大學),江蘇南京211106)
運動艦船在合成孔徑雷達(SAR)圖像中會發生散焦。為解決運動艦船精細成像的難題,提出了一種基于機載三通道SAR系統對艦船實現海雜波抑制和聚焦成像的信號處理方法。鑒于艦船運動的未知性,利用三通道SAR結構對艦船目標定位,可以抑制成像背景的強海雜波影響,同時引入數字聚束技術與廣義二階Keystone變換,解決了運動目標SAR成像中跨距離單元走動和散焦的問題,可對圖像中多個不同運動狀態的艦船實現并行成像處理,獲取聚焦良好的圖像。仿真數據結果驗證了所述方法的有效性與可行性。
合成孔徑雷達(SAR);艦船成像;數字聚束;廣義二階Keystone變換
0 引言
利用合成孔徑雷達(Synthetic Aperture Radar,SAR)對海面運動目標(如艦船)進行定位、成像以及識別,在海洋遙感領域有著重要應用前景。海面動目標處于復雜的背景環境中,海面回波對動目標而言為雜波,由于動目標信號中同時疊加了海雜波、噪聲等干擾信號,尤其是高海情下的強海雜波會嚴重影響動目標定位精度。多通道SAR動目標檢測技術可以實現海雜波的有效抑制,提高運動目標的信雜噪比并對動目標進行精確定位,實現該技術的主要方法有DPCA(Displaced Phase Center Antenna)技術[1]、ATI(Along-Track Interferometry)技術[2]、STAP(Space-Time Adaptive Processing)技術[3]等。
常規的動目標成像以犧牲圖像分辨率為代價,限制動目標的距離徙動不超過一個分辨單元,使得動目標成像分辨率較低。隨著逆合成孔徑雷達(Inverse Synthetic Aperture Radar,ISAR)技術的發展,針對艦船成像的特殊性出現了SAR與ISAR技術相結合的成像方法[4],但ISAR的方位向分辨率依賴于艦船自身運動,在成像時間段中由于艦船不斷變化的運動狀態使得方位向分辨率降低,目標細節難以分辨,且ISAR成像的計算量相對較大,對目標實時成像存在困難。目前,采用SAR技術進行艦船檢測的相關研究已經十分完善,因此研究SAR成像技術對海面艦船的成像有著重要意義。本文考慮到當成像區域中存在多個運動目標且運動狀態各異時,僅僅采用統一的運動補償方法很難獲得高質量SAR圖像,將數字聚束技術引入成像算法中,根據動目標的各自位置坐標的定位結果進行二次運動補償,并行地對每個動目標進行聚束處理,改善成像效果。由于動目標運動狀態的不可預知性,數字聚束處理后的動目標圖像可能仍然存在距離徙動和散焦現象,因此加入廣義二階Keystone變換[5]校正剩余距離彎曲以及距離頻率和方位時間的耦合,實現動目標的良好聚焦成像。最后通過實驗仿真驗證了本文方法的正確性。
1 運動目標SAR成像散焦原因
建立雷達動目標成像模型,如圖1所示。假設雷達工作在正側視聚束模式(可推廣至斜視情況),載機速度大小V a,離地面高度Z0,O點是所選的成像參考點,星下點距O點Y0;動目標在方位向慢時間t=0時位于P(x0,y0,0)處,與雷達APC相距,運動狀態分解成沿x方向的速度V x與加速度a x以及沿y方向的速度V y與加速度a y;動目標瞬時坐標為(x t,y t,0),則雷達至運動目標的瞬時距離R(t)表達式為

對式(1)作菲涅爾近似并忽略二次以上項可得

結合方位時間長度和艦船運動的非高機動性,忽略目標的加速度,式(2)簡化成

易知,當動目標同時存在方位向速度V x與地距向速度V y時,距離歷程包含常數項、關于方位時間的一次項和二次項,后兩項分別代表動目標距離走動和距離彎曲。雷達發射線性調頻(LFM)信號,回波經正交解調和距離脈壓后表示成
式中,τ和t分別為方位向慢時間和距離向快時間,w a(t)為方位向包絡,λ為發射波長,sinc(·)為采樣函數,B為發射信號帶寬,c為光速。
由式(4)的相位求出運動目標的多普勒頻率為

則多普勒參數表達式為
式中,fdc和fdr分別為動目標的多普勒中心頻率和多普勒調頻率。如果目標靜止,則上述多普勒參數表達式變為

可以看出,靜止目標的多普勒頻率僅與雷達運動速度V a有關。常規的SAR成像算法均以靜止目標作為參考進行運動補償,若直接用來對動目標成像,會因為動目標多普勒參數中包含與自身運動參數相關的量而無法實現動目標聚焦成像。從文獻[6]的運動點目標成像結果看出,徑向速度會導致動目標圖像發生跨距離單元走動和方位偏移,而切向速度會導致多普勒調頻率的變化使得方位向分辨率下降,產生圖像散焦等現象,將嚴重影響到運動目標的檢測。
2 海雜波抑制及動目標定位
2.1 海雜波模擬
由于研究對象是海面艦船,需要模擬目標所處的背景環境,即海雜波仿真。受海浪、涌流等因素影響,海雜波的特性復雜多變,與雷達自身參數和自然環境等有密切關系。雷達波束照射下的海面并非一個平面,各散射單元反射電磁波的方向和強度均不相同,因此將整個波束照射的海面看作是按照雷達距離分辨率和方位分辨率劃分的雜波單元,單個雜波單元內的目標可以看作點目標處理,所有雜波散射單元回波的疊加即構成總的海雜波回波信號。
根據雷達方程,第i個距離單元、第j個方位單元處的雜波單元的海雜波回波信號[7]可以表示成

式中:st(t)為雷達發射信號;為該海雜波單元回波的時間延遲為該散射單元至雷達的距離;?ij為該海雜波單元的隨機相位;A ij為該海雜波單元的幅度調制函數,表達式為

式中,G ij為天線波束指向處的功率增益,σ0為海雜波后向散射系數,S ij為海雜波單元的雷達照射面積,n ij為海雜波幅度調制因子。海雜波幅度分布的概率密度函數可以用瑞利分布、對數正態分布、韋布爾分布和K分布四種統計模型近似得到,其中K分布模型作為一種復合統計模型,是被公認為能夠較準確地模擬雷達海雜波的模型之一。本文仿真的海雜波幅度分布為服從時空相關二維K分布的隨機序列,具體方法參考文獻[8]。
2.2 回波模型
多通道SAR系統收發信號的方式有:全孔徑發射、多孔徑同時接收的常用方式;一個子孔徑發射、多孔徑同時接收的主從方式;子孔徑輪流發射、多孔徑同時接收的乒乓方式。本文以三通道系統為例,采取常用收發方式。
三通道SAR幾何模型如圖2所示,雷達仍采用正側視聚束觀測模式,A、B、C點是3個子孔徑天線,相鄰子孔徑間隔均為d,雷達發射信號采用全孔徑方式,相位中心位于B點,經場景反射后的回波信號由3個子孔徑同時接收。一般來說,目標到雷達的距離要遠大于子孔徑間隔d,目標回波可近似為平面波,定義BP與雷達發射孔徑相位中心的夾角為目標方位角,則方位角θ處靜止目標P點的回波在相鄰兩子天線間存在相位差


圖2 三通道SAR幾何模型
若P點為動目標,假設其相對于雷達有徑向運動,那么P點在SAR圖像中顯示的方位位置將發生偏移,出現在P′點。設P′點對應的空間方位角為θ′,在圖像中位于距離方位像素單元(m,n)處,m和n分別代表距離和方位單元索引號。設該像素單元同時疊加有靜止場景雜波,則該處的靜止目標在相鄰通道間相位差為

設雜波幅度為1,忽略噪聲干擾,三通道SAR圖像同一像素單元(m,n)的信號可表示為
式中:As為動目標信號對靜止雜波歸一化的幅度常數,與動目標的后向反射系數有關;為動目標P點自身信號相位;為三通道中P′點的雜波相位。
2.3 雜波對消
根據上述分析,相鄰通道SAR圖像中P′點處靜止目標存在式(13)的相位差,則該處的空域對消權系數表達式為
通過逐像素單元計算每一像素單元對應的方位角,依照式(15)計算相鄰通道對消權系數進行乘權相減,可以消除靜止目標信號,實現雜波抑制。
空域對消后圖中P′點處信號變為

三通道SAR系統經過空域對消可以實現雜波抑制,得到的兩幅圖像中動目標已經能夠凸顯出來,此時再將兩幅圖像進行干涉處理,即對動目標所在P′點處的信號Sinterf1和Sinterf2繼續作干涉處理,并取相位得顯然,經過空域對消能夠抑制靜止雜波并得到動目標方位角決定的相位差信息。

實際應用中,由于通道幅相誤差、海雜波分布非均勻等情況的存在,按照上述方法所得的理論權系數會有很大誤差,因此采用自適應雜波抑制干涉(Adaptive Clutter Suppression Interferometry,ACSI)技術進行雜波對消。ACSI根據最小均方誤差(Minimum Mean Square Error,M MSE)準則,選擇滿足如下條件的W(m,n)作為待檢測單元的對消權系數:

式中,S i(m,n)和S i+1(m,n)表示相鄰通道像素單元(m,n)處的信號。
2.4 動目標檢測及定位
對雜波對消后的任一結果圖進行CFAR檢測,即根據固定虛警概率設定門限值,將大于門限值的判定為動目標、低于門限值的判定為靜止目標,從而將動目標從圖像當中檢測出來。由檢測出的動目標所在距離方位像素單元數(M p,N p),根據式(10)、(17),求出動目標真實方位角的估計值為

在遠場假設的前提下,得到動目標相對于雷達波束中心的坐標位置為

式中,R0為雷達作用距離;Nr,pr分別為距離向采樣點數和距離向像素間隔,且實際定位過程中,如果雷達載機攜帶有全球定位系統(GPS)或者慣性導航系統(INS),結合式(20)可以很容易地將動目標的相對坐標轉化為絕對的經緯度位置信息,從而達到實時制導的目的。
3 動目標聚焦成像方案
3.1 數字聚束處理
本文的三通道SAR成像流程采用線性距離多普勒(Linear Range Doppler,LRD)算法,作為一種簡化的極坐標格式算法(Polar Format Algorithm,PFA),當成像場景范圍較小時,線性RD算法可以實現目標區域的快速成像,算法實時性強、計算量少的特點均有利于實現動目標的實時定位。
在線性RD算法流程中,統一選取雷達波束照射中心作為運動補償參考點,也即成像中心點。事實上,這樣簡單的處理方式僅僅對場景中心點實現了精確運動補償,其余場景中的各點均有誤差,尤其是偏離場景中心點越遠處運動補償誤差越大[9],運動目標由于徑向速度和切向速度的存在依然會導致距離徙動和方位向散焦。三通道SAR系統CFAR檢測后,動目標凸顯出來,對雜波抑制后的圖像數據采用數字聚束處理,信號處理流程圖如圖3所示。操作步驟如下:
①對CFAR檢測后的圖像域數據進行截取,加窗截取第i個動目標的圖像數據,以減小運算量。
② 對截取的數據進行方位向逆傅里葉變換(IFFT)回到方位時域,并進行運動補償逆處理,包括相位補償逆處理和距離對準逆處理。這里的逆處理針對原成像算法選取的參考點,目的是將截取的動目標圖像數據塊還原到僅完成距離脈壓的結果。
③將估算的動目標位置坐標作為新的運動補償參考點進行二次運動補償和方位聚焦。
④截取第i+1個動目標的圖像數據。重復上述操作,直到遍歷所有動目標。
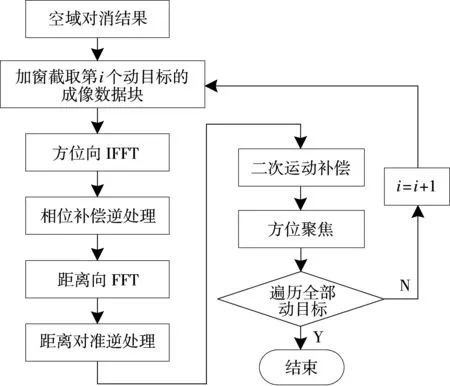
圖3 數字聚束信號處理流程
以動目標的定位結果作為參考點進行二次運動補償即距離對準和相位補償后,信號可以表示為

式中,ΔR(t)=R(t)-Rtar(t)表示雷達相對于參考點的轉動分量,Rtar(t)表示雷達至動目標定位結果點處的瞬時距離。
令ΔR(t)=C1t+C2t2(忽略三次以上的項),將式(21)信號變換到距離頻域并進行相位補償得到
式中,fτ為距離頻率,fc=c/λ為雷達中心頻率。很明顯,式(22)的指數部分存在距離頻率fτ與方位向時間t的耦合,如果在數字聚束后直接作方位向聚焦還是會存在散焦,因此需要對信號進行距離多普勒解耦合,才能實現聚焦成像。
3.2 廣義二階Keystone變換
Keystone變換通常用于消除線性距離走動。對于本文研究的運動目標,會存在較大距離彎曲的情況,需要采用廣義二階Keystone變換消除。廣義二階Keystone變換的核心思想是關于方位時間t的尺度變換,本小節采用該方法去除距離頻率fτ與方位向時間t之間的耦合關系。令

代入到式(22)得到

可以看出,經過一次廣義二階Keystone變換之后,距離彎曲得以校正,但距離走動依然存在。在消除距離走動之前,需要先將式(24)中的調頻項補償掉,本文采用文獻[10]中基于Radon變換的多普勒參數估計方法,選取一個距離單元的信號對方位向調頻率進行估計,假設調頻率估計值為f m,用該參數對調頻項進行補償,可以去除二次相位項,得到

此時,信號僅剩余距離走動部分,再引入一次廣義二階Keystone變換,令將距離走動中距離頻率fτ與新的方位向時間t m之間的耦合去除,即

可見,經過兩次廣義二階Keystone變換,距離彎曲與距離走動得以消除,再對式(26)進行距離向IFFT變換和方位向FFT即能夠得到非合作動目標的清晰SAR成像結果。本文所提方法的總體流程圖如圖4所示。

圖4 海面艦船SAR成像算法流程
4 仿真結果與分析
本文采用IDL軟件仿真的雷達回波數據驗證算法有效性。雷達工作在X波段,采用正側視觀測模式,系統主要仿真參數如表1所示,距離、方位分辨率均為1 m。
按照成像的像素單元大小劃分海雜波單元,圍繞成像區均勻設置512行、512列雜波點,點源反射率服從Morchin模型[11],該模型簡單、適用范圍廣,并且不需要考慮雷達的極化方式,計算公式如下:

式中,ss為海情級數,θg為雷達入射余角也即擦地角,β=[2.44(ss+1)1.08]/57.29 rad,he≈0.025+0.046ss1.72m,θc=arcsin(λ/4πhe)表示臨界角。采用球不變隨機(SIRP)法生成時空相關的二維K分布海雜波。設計的仿真運動艦船目標點陣模型如圖5所示,尺寸為75 m×30 m(長×寬),點橫豎間距均為1.5 m,一共13個散射點。仿真了兩種不同運動狀態的艦船:艦船目標1的中心點設置在(500,0)處,速度大小為1 000 m/min,方向與+x軸夾角為45°;艦船目標2的中心點設置在(-500,250)處,速度大小也為1 000 m/min,方向與+x軸夾角為120°,初始信雜比、信噪比均為10 d B。

表1 三通道SAR系統參數

圖5 仿真艦船點陣模型
對三通道回波信號進行模擬,加上仿真海雜波及高斯白噪聲,海情級數取3級,得到某一通道的SAR成像結果如圖6所示。采用ACSI對相鄰通道圖像作雜波對消處理,抑制掉海雜波后的結果如圖7所示,可以明顯看到兩個艦船目標在圖像中凸顯出來,背景海雜波得到了極大抑制。在CFAR檢測后,按式(20)對艦船目標的坐標位置進行估計,估計結果見表2,方位向的定位誤差在十幾米量級,實現了有效定位。

圖6 某通道SAR圖像
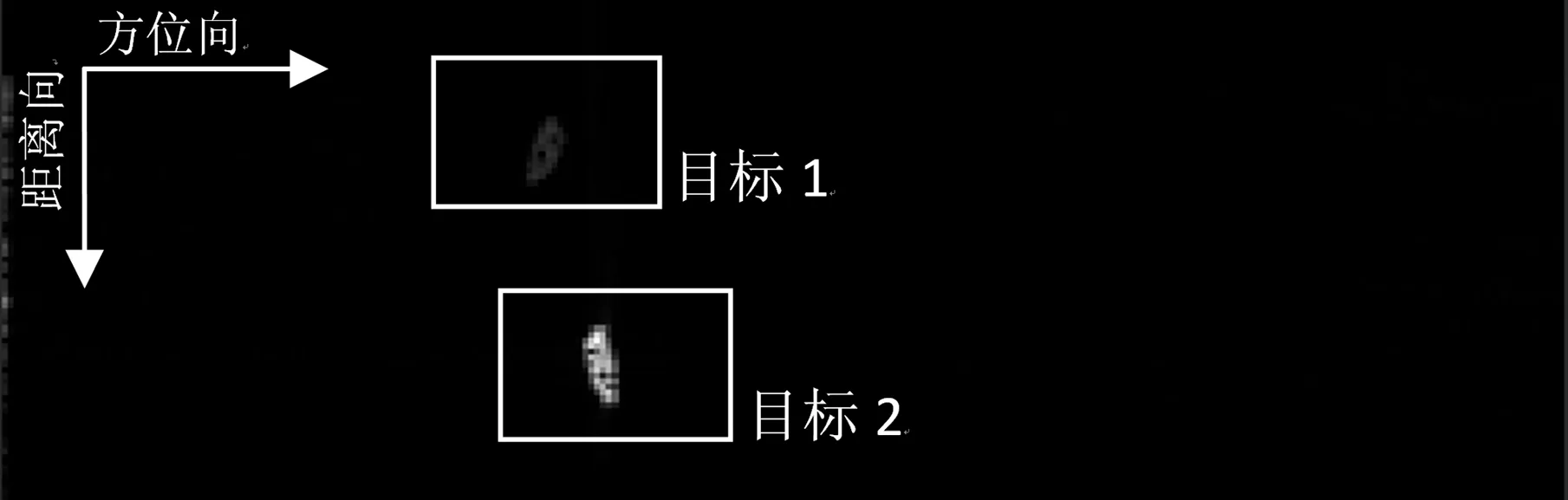
圖7 海雜波抑制后的艦船圖像
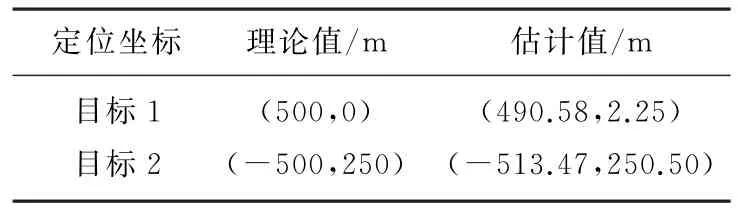
表2 海面艦船目標坐標估計結果
根據檢測到的動目標數目,在任一雜波對消結果圖中進行數據截取,如圖8(a)、(b)所示。分別對截取后圖像進行運動逆補償處理,再依據表2估計出的艦船目標實際位置坐標進行數字聚束處理,成像結果如圖8(c)、(d)所示,顯然,進行過數字聚束后的艦船目標圖像的聚焦效果有了明顯改善,但仍然存在距離徙動和散焦現象。針對此結果,引入廣義二階Keystone變換法對數字聚束后的圖像作距離彎曲校正和去耦合,最終成像結果如圖8(e)、(f)所示,消除了運動艦船點陣目標的大距離徙動,且實現了良好聚焦,成像質量得到了明顯的提升。


圖8 多個動目標并行成像結果
5 結束語
本文提出了一種基于三通道SAR的海面艦船成像方法。文中通過仿真時空相關二維K分布海雜波模擬了海面艦船所處的雜波背景環境,并采用ACSI法實現多通道的雜波對消,將動目標從海雜波環境中檢測出來。在動目標檢測后,引入數字聚束技術與廣義二階Keystone變換,去除動目標的大距離徙動和距離方位耦合現象,可并行獲取圖像中多個不同艦船目標的良好聚焦圖像。仿真數據給出了海雜波抑制后的艦船目標SAR圖像、數字聚束處理結果圖,以及廣義二階Keystone變換處理后的成像,對成像效果進行了對比分析,結果表明本文方法能夠很好地實現海面艦船目標的聚焦成像,可以實時對多個動目標進行定位以及聚焦成像,是一種有效的艦船SAR成像方法。
[1]王肖洋,高貴,周石琳,等.一種基于雙通道DPCA的SAR-GMTI雜波抑制方法[J].雷達學報,2014,3(2):241-248.
[2]SUCHANDT S,RUNGE H,BREIT H,et al.Automatic Extraction of Traffic Flows Using TerraSAR-X Along-Track Interferometry[J].IEEE Trans on Geoscience and Remote Sensing,2010,48(2):807-819.
[3]GUERCI J R.Space-Time Adaptive Processing for Radar[M].Norwood,MA:Artech House,2003.
[4]汪玲,朱岱寅,朱兆達.基于SAR實測數據的艦船成像研究[J].電子與信息學報,2007,29(2):401-404.
[5]賀小慧,張龍.基于廣義Keystone變換的機載雷達艦船目標ISAR成像[J].西北大學學報(自然科學版),2013,43(6):885-889,923.
[6]WEI B,ZHU D,WU D.A Novel Approach to Moving Target Screening for UHF-Band SAR GMTI[J].IEEE Geoscience and Remote Sensing Letters,2015,12(10):2095-2099.
[7]張凱,張偉.PD雷達導引頭海雜波回波信號模擬[J].雷達科學與技術,2015,13(2):117-121.ZHANG Kai,ZHANG Wei.Simulation of Sea Clutter Echo Signal for PD Radar Seeker[J].Radar Science and Technology,2015,13(2):117-121.(in Chinese)
[8]管四海,歐陽繕,蔣俊正,等.修正的K-分布海雜波仿真模型和新的海雜波功率譜描述方法[J].桂林電子科技大學學報,2014,34(6):444-450.
[9]CUMMING I G,WONG F H.合成孔徑雷達成像:算法與實現[M].洪文,胡東輝,譯.北京:電子工業出版社,2007.
[10]朱振波,陳風波,湯子躍.一種基于Radon變換的SAR多普勒參數估計方法[J].武漢理工大學學報(交通科學與工程版),2011,35(1):126-129,133.
[11]李云龍,趙宏鐘.基于K分布雷達海雜波建模與仿真[J].制導與引信,2011,32(2):14-19.
An Imaging Method for Maritime Ship Based on Airborne Three-Channel SAR
XIA Huiting1,2,LI Yong1,2,HUANG Xiangfei1,2
(1.College of Electronic and Information Engineering,Nanjing University of Aeronautics and Astronautics,Nanjing211106,China;2.Key Laboratory of Radar Imaging and Microwave Photonics of Ministry of Education(Nanjing University of Aeronautics and Astronautics),Nanjing211106,China)
The moving maritime ships appear blurred in SAR images.In order to solve the problem of fine imaging of moving ships,a signal processing method based on airborne three-channel SAR system for sea clutter suppression and focused imaging is proposed.In view of the unknown nature of ship motion,the three-channel SAR structure is utilized to inhibit the effects of strong sea clutter in the background for the precise location of ships.The digital spotlight technology and generalized second-order Keystone transform are introduced to remove the across-range cell migration and defocusing in SAR images of the moving targets.This method can obtain well-focused SAR images of different moving targets by parallel processing.The results of simulation data demonstrate the effectiveness and feasibility of this method.
synthetic aperture radar(SAR);maritime ship imaging;digital spotlight;generalized second-order Keystone transform
TN959.72
A
1672-2337(2017)01-0001-07
10.3969/j.issn.1672-2337.2017.01.001
2016-07-22;
2016-10-04
南京航空航天大學研究生創新基地(實驗室)開放基金項目(No.KFJJ20150405);中央高校基本科研業務費專項資金資助項目;航空科學基金(No.20142052020)

夏慧婷女,1991年生,江蘇鎮江人,碩士,主要研究方向為合成孔徑雷達信號處理、動目標檢測與成像算法。E-mail:xiahuiting_xht@163.com

李勇男,1977年生,河南洛陽人,副教授、碩士生導師,主要研究方向為雷達信號處理、合成孔徑雷達成像算法、動目標檢測與成像算法、多普勒參數估計、氣象雷達信號處理。

黃翔飛男,1992年生,福建南平人,碩士,主要研究方向為逆合成孔徑雷達成像。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
