醫護服務機器人的UWB定位研究
2018-01-04 12:02:04喻恒丁亞飛
電腦知識與技術 2018年29期
喻恒 丁亞飛
摘要:醫護服務移動機器人最重要最基礎的問題之一是精確定位問題,本文將基于UWB定位算法和系統應用于醫護移動服務機器人的研究,論述了UWB無線通信的定位原理,建立了機器人的數學模型和定位方案,從而實現了機器人的室內定位,為后期的自主導航創造前提條件。
關鍵詞:服務機器人;超寬帶定位;TOA
中圖分類號:TP319 文獻標識碼:A 文章編號:1009-3044(2018)29-0197-02
Abstract:Precise positioning is one of the most important problems in the research of mobile robot for medical service.This paper will study the application of UWB location algorithm in medical mobile service robot.Based on the discussion of UWB positioning principle, established the positioning system and mathematical model of robot so then The indoor positioning of robot is realized .The method creates prerequisites for later autonomous navigation.
Key words: Service robot; UWB Location;TOA
隨著人口不斷增加以及老齡化的發展,我國醫療服務行業的壓力越來越大,為了解決病患服務需求不斷增加和醫療工作人員數量增速緩的矛盾,降低醫生及護士工作量,進一步減輕相關工作壓力,代替人完成危險易傳染醫療環境的作業任務,醫療服務機器人的相關技術在近年來開始逐步進行研究,其中室內自主巡視查房類機器人開始應用到醫護日常輔助工作中。專門用于醫護服務的機器人研究主要包括精確定位和導航、機構設置、信息融合、能源管理以及無線數據傳輸等,其中精確定位是室內自主移動機器人的最基礎的研究內容。本文通過分析,將超寬帶(UWB,Ultra-Wide Band)室內無線定位系統應用于面向醫院的醫護服務機器人的定位,實現了機器人在室內移動的實時定位,機器人在醫院的病房的復雜環境下能夠自主移動到指定病床,實現病房巡視、送藥。該系統將TOA定位結合UWB,通過建立坐標模型和定位算法,初步實現了機器人的精確定位。
1 UWB定位技術
1.1 UWB技術概述
UWB技術作為一種高速率高帶寬的短距離無線通信技術,越來越受到物聯網行業科研人員的關注。超寬帶(UWB)技術相比較于常見的短距離無線通信技術如藍牙、WIFI、ZigBee等,其特有的多址技術和調制方式使得帶寬很寬、數據傳輸速率高、較低的功耗以及很好的安全性等特點[1]。近年來國內外開始研究將UWB應用在近距離精確室內定位,獲得比較好的效果。其亞納秒級超窄脈沖在無線定位特別是室內無線定位章具有較高的優勢。
1.2 UWB定位方法
利用UWB定位系統實現定位,須要在室內搭建若干基站網絡,確定移動機器人和各個參考基站之間的位置關系,通過建立坐標模型實現詳細的定位算法,再利用解析幾何的數學方法將測得的參數通過測算確定移動機器人位置信息[2]。UWB的定位方法包括基于接收信號強度法(RSSI)、基于到達角度定位法(AOA)、基于信號到達時間定位法(TOA)[3]。RSSI根據信號接收強度隨著接受距離的增大而減弱的原理,綜合兩者具體函數關系,確定距離從而進行定位。AOA是計算接收節點相對發送節點之間的具體方位即偏移角度,在結合三角測量法測算具體定位信息。TOA則是根據信號從基站節點到達標簽節點消耗的時間計算節點之間的距離,再通過計算多個基站到標簽的距離,利用解析幾何方法實現定位。相比較AOA和RSSI,TOA方法更能發揮UWB技術自身的優點,特別是UWB信號亞納秒級超窄脈沖的特點,可以達到很高的精確度。本文采用的是TOA算法。
2 基于信號到達時間定位法(TOA)
基于 TOA 的無線定位方法原理是:確定兩個節點A,B。將節點A設置為發送節點。B設置為接收節點,信號從A傳輸到B需要一定的時間,系統可以根據從節點間信號傳輸時間來測算兩個節點之間的距離,再通過節點點位置和距離建立三角模型,利用三角定位法實現無線定位。
TOA根據測距量程可以分為有兩種:雙程測距和單程測距。因為UWB發射的是脈沖信號,接近光速的無線信號,可以在極短時間內獲得測量值,因此單程測量和雙程測量在測量效率上相差無幾,但是由于雙程測量的精度高、誤差小,所以TOA更多的使用雙程測距。
雙程測距(TWR,Two Way Ranging)的原理是各個參考節點利用接收與發送節點之間的通信信號往返的路程時間來估算節點間的距離值。發送節點A在初始時刻發送給接收節點B規定信息的數據包,該數據包包含時間信息,節點B接收到信號數據包,提取出數據中的時間信息,同時回傳同樣包含時間信息的數據信號給節點A,節點A以接收到回復包時間確定傳輸完成,節點A根據收到的時間信息數據包來算出傳播時間,從而可計算兩個節點距離值。公式如下:
其中Tr表示因設備反應造成的誤差時間,T1表示A節點收到數據包的時刻,d表示兩節點之間距離,c表示光速。在具體的測量計算中,可通過提前確定Tr值方式以及多次測量取平均值的方式進一步減小測量誤差。
3 系統模型及算法
機器人定位精度和準確度不僅取決于各種定位模型和算法,還包括其所采用的傳感器種類和性能。常見的應用于移動機器人的傳感器有CCD傳感器、激光雷達、測距超聲波、紅外測距、六軸加速度傳感器、陀螺儀、指南針等[5]。本文系統使用DW1000傳感器,該傳感器基于UWB通信,可通過建立基站和標簽節點,實現室內定位,使用方便,性能穩定。
3.1 UWB模型
首先在室內空間安裝基站節點,要求通信信號可以覆蓋整個室內,理論上安裝位置可以隨意,考慮到UWB通信距離在10m以內,為了更好的獲取通信信號,獲得準確測量結果,具體安裝位置可選擇室內屋頂角落處,基站之間距離相距3-5米,形成等邊三角形。考慮到機器人只在地面移動,因此可以不考慮高低空間定位。將一個傳感器節點作為標簽固定于機器人,空間安放的基站發射UWB信號,機器人所載標簽接收信號,通過計算每個基站信號傳輸到標簽的時間,可算出標簽分別距3個基站的距離,再利用結合基站的三角形分布,利用解析幾何測算機器人在室內相對位置和方位,隨著機器人的移動,可選擇空間信號最好的三個基站進行計算。
3.2 坐標模型及定位算法
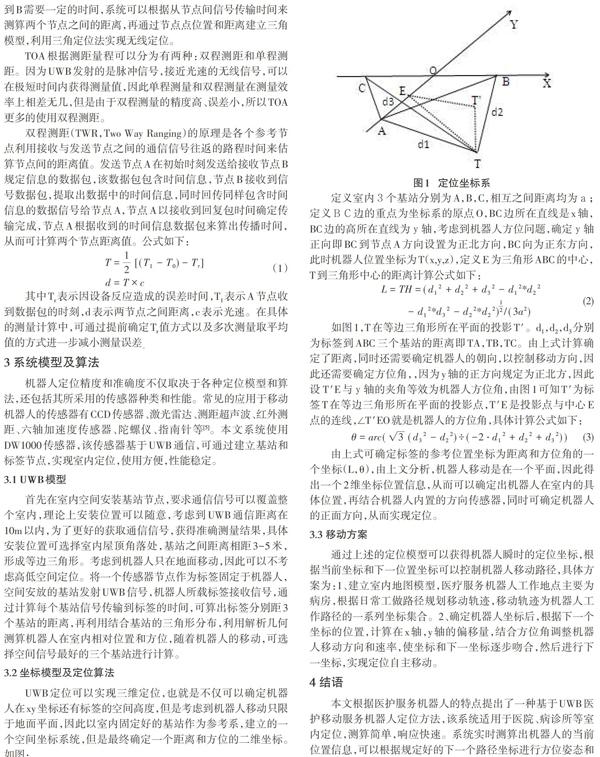
UWB定位可以實現三維定位,也就是不僅可以確定機器人在xy坐標還有標簽的空間高度,但是考慮到機器人移動只限于地面平面,因此以室內固定好的基站作為參考系,建立的一個空間坐標系統,但是最終確定一個距離和方位的二維坐標。如圖:
定義室內3個基站分別為A,B,C,相互之間距離均為a;定義BC邊的重點為坐標系的原點O,BC邊所在直線是x軸,BC邊的高所在直線為y軸,考慮到機器人方位問題,確定y軸正向即BC到節點A方向設置為正北方向,BC向為正東方向,此時機器人位置坐標為T(x,y,z),定義E為三角形ABC的中心,T到三角形中心的距離計算公式如下:
如圖1,T在等邊三角形所在平面的投影T′。d1,d2,d3分別為標簽到ABC三個基站的距離即TA,TB,TC。由上式計算確定了距離,同時還需要確定機器人的朝向,以控制移動方向,因此還需要確定方位角,,因為y軸的正方向規定為正北方,因此設 T′E與y軸的夾角等效為機器人方位角,由圖1可知T′為標簽T在等邊三角形所在平面的投影點,T′E是投影點與中心E點的連線,∠T′EO就是機器人的方位角,具體計算公式如下:
由上式可確定標簽的參考位置坐標為距離和方位角的一個坐標(L,θ),由上文分析,機器人移動是在一個平面,因此得出一個2維坐標位置信息,從而可以確定出機器人在室內的具體位置,再結合機器人內置的方向傳感器,同時可確定機器人的正面方向,從而實現定位。
3.3 移動方案
通過上述的定位模型可以獲得機器人瞬時的定位坐標,根據當前坐標和下一位置坐標可以控制機器人移動路徑,具體方案為:1、建立室內地圖模型,醫療服務機器人工作地點主要為病房,根據日常工做路徑規劃移動軌跡,移動軌跡為機器人工作路徑的一系列坐標集合。2、確定機器人坐標后,根據下一個坐標的位置,計算在x軸,y軸的偏移量,結合方位角調整機器人移動方向和速率,使坐標和下一坐標逐步吻合,然后進行下一坐標,實現定位自主移動。
4 結語
本文根據醫護服務機器人的特點提出了一種基于UWB醫護移動服務機器人定位方法,該系統適用于醫院、病診所等室內定位,測算簡單,響應快速。系統實時測算出機器人的當前位置信息,可以根據規定好的下一個路徑坐標進行方位姿態和移動動作調整,實現機器人自主導航。本文所應用的UWB定位方法將基站安裝在室內,并以此建立參考坐標,由于受房屋結構局限,測量精度不夠,同時路徑需要人為設置,無法實現路徑的自動規劃,后期還需要在本定位方法的基礎上進一步探討室內地圖建模和路徑自動規劃、自主動態避障等功能,以便實現自主導航。
參考文獻:
[1] Jiang Z P, Nijmeijer H. Tracking Control of Mobile Robots: A Case Study in Backstepping [J]. Automatica, 1997, 33(7): 1 393-1 399.
[2]張在琛,畢光國.超寬帶關鍵技術分析及發展策略的思考[J].電氣電子教學學報,2004,26(3):6-16.
[3] 王秀貞.超寬帶無線通信及其定位技術研究[M].上海:華東師范大學,2009.
[4] 趙立軍.室內服務機器人移動定位技術研究[D].哈爾濱:哈爾濱工業大學.2009.
[5] 王麗軍,王景川,陳衛東.動態環境下智能輪椅的規劃與導航[J].上海交通大學學報,2010,
【通聯編輯:梁書】
