海上遇險目標漂移與搜尋區域優化確定分析?
2018-01-04 01:33:02王光源劉建東章堯卿毛世超
艦船電子工程 2017年12期
王光源 劉建東 章堯卿 毛世超
1 引言
我國擁有約300萬平方公里的遼闊海域,跨越熱帶、亞熱帶和溫帶,是東北亞地區通往世界各地的主要海上交通要道。隨著我國海上交通運輸與海上經濟開發活動的不斷發展,以及海上軍事訓練活動的延伸拓展,在遭受熱帶氣旋、寒潮、海霧等惡劣海洋天氣影響,以及海上突發的船舶碰撞與軍事沖突等,極易帶來各類海難事故的發生,嚴重威脅海上遇險人員的生命安全[1~2]。遇險目標失去自身動力后,漂浮和移動狀態會不斷變化,在海風、海流聯動下呈現出帶隨機性運動。因此,快速確定遇險目標所處海域,將有效幫助搜救人員及時掌握遇險目標所處海域海情信息,制定科學的搜救方案,有效控制事態發展,提高海上搜救效率和成功率[3~4]。
海上遇險目標產生漂移運動主要受到海流和風壓影響,本文根據遇險海域海流和風壓的矢量特性,通過矢量疊加方法,估算出遇險目標所在的可能位置,進一步估算出搜索半徑,從而確定搜尋區域。
2 遇險目標受力分析
海上遇險目標在自身失去動力且忽略垂直海面方向運動的前提下,其在海面上的水平漂移主要受海風、海浪、表層海流的共同影響[5]。根據牛頓力學定律,海上漂移目標的運動加速度關系為
其中,V為遇險失去動力目標的漂移速度,Fa為海風施加的外力,Fw為海浪的推動力,Fc為表層海流的涌動力,m為海面遇險目標的質量,m'為目標表面附著的水粒子的加速度所產生的附加質量。k為附加質量的系數,其取值與搜尋的遇險目標的幾何外形有關[6](圓柱體 k=1,球體 k=0.5 ,長軸:短軸=2的橢球體k=0.2)。
其中,Cd為海面風施加的外力的系數(主要與目標的外部形狀有關),ρa為海面上空的大氣的密度,Aa是遇險漂流目標處于海面上方的部分在迎風垂直面上的投影的面積,Wa為海面上空海風的速度。
式中,Ciw是遇險海域海面海波浪的反射系數,g是重力加速度,A是該海域海浪上下波動的幅度,ρw是海水的密度,Lt是遇險目標的長度。Fc=1/2?CcdρwAwVb(4)式中,Ccd是海面洋流的推動力的系數,Aw為遇險漂流目標處于海面水下部分垂直洋流方向的投影面積,Vb為遇險目標相對于海水的漂移速度。
在遇險漂流目標長度(通常認為50m以下,包括船體殘骸、墜海人員、救生橡皮艇、落水直升飛機等)比海面波浪的波長小的情況下,海波浪的輻射力Fw通常可以忽略,也就是Fw為0[6]。海上遇險目標在漂移最初階段,受到外力的作用,會出現加速很快的現象(瞬時加速度可以理解為無窮大),隨著時間的推移,漂移目標受到的外力趨于平衡,漂移速度相對穩定,加速度可以近似為0。
將式(2)、(4)代入式(5)整合可得:
式子左邊部分的大小是由遇險海域海風的速度決定的。因此,根據海洋環境信息中的遇險海域的風場數據信息和漂移目標的本身參數信息就可以推算出遇險目標相對于海水的漂移速度Vb。
3 遇險目標海上漂移模型
遇險目標的海上漂移速度是目標相對于海水的速度與目標所處海域海流速度的矢量疊加[7],如下式:
式中,Vrelative是遇險目標與海水的相對速度,Vcurrent是表層海流速度。Vrelative包含的是遇險海區海風、海浪對目標海上漂移速度的影響。當遇險目標尺寸與周邊海浪的波長相比較小時,可以忽略海浪的影響[8~9],海風引起的漂移由Vrelative體現(Vrelative又稱風致漂移速度,也稱為風壓,而Vcurrent則主要由表層海面的海流影響)。Vcurrent通常由海面表層海流和海浪導致的漂移兩者組成。對于大型海上遇險目標,海浪的影響比較明顯,必須要進一步分析,本文主要研究的是長度小于50m海上遇險目標的搜尋,可以忽略海浪的影響。
假設V1為遇險海區表層的海流矢量流速,V2為海風引起的遇險目標的漂移矢量速度,用V表示遇險目標漂移的速度矢量是
可得目標的漂移模型:
4 風壓模型
風壓(Leeway),洋面也稱風壓差,是遇險目標暴露在水面以上部分的在海風的作用下所產生的相對海水的運動,具有方向性,風壓的大小就是運動速度的大小。風壓角表示風壓的方向,按照海風下風方向,左用負表示,右用正表示。影響風壓的因素主要有遇險目標的大小和尺寸,以及目標本身的入水體積與整體的比值。Allen在研究論文[9]的研究成果基礎上將風壓分解為crosswind和downwind兩個方向,兩者相互垂直,圖1為風壓矢量的分解示意,L為整體風壓的矢量,Lα為風壓角,Ld為下風方向風壓(downwind)矢量,Lc為橫風方向風壓矢量(crosswind)。
根據有約束和無約束兩種情況,風壓可用無約束風壓模型(Y-Model)和有約束風壓模型(0-Model)[5]表示。 Y-Model模型依據實驗數據統計回歸建立,但它僅是“原點”,也就是風速為0的時侯風壓并不為0,不符合常識,因此需要將風速很小(或為0)的情況下的風壓做特殊考慮。0-Model模型經過“0點”,風速很低(為0)時會產生不能忽略的較大誤差。
Y-Model模型中,Ld,Lc與海平面上的海風風速之間的關系式是:
0-Model模型中,Ld,Lc與海平面上的海風風速之間的關系式是:
式中,W10為海面風速;ad,ac,bd,bc是回歸系數。ad和ac為downwind矢量與crosswind矢量對應的海面風速的斜率,bd,bc為downwind矢量與crosswind矢量對應的偏移量。漂移目標沿下風偏移左右方向不同,ac和bc系數取值不同。式(12~13)過原點,其downwind矢量與crosswind矢量對應的偏移量bd和bc為0。由實驗表明,最初狀態下漂移目標的下風偏移在左右兩個方向上具有相同的概率,無法在漂移運動前確定其漂移的準確方向,隨著目標沿某一方向發生了漂移運動,風壓的實際方向就會以4%~6%/小時的變化概率改變,且方向的改變、發生的概率與目標的自身沒有關系。對于航空搜尋,一兩個小時內方向改變的概率相對很低,所以在計算的時候可以認為一旦遇險目標開始漂移,它的漂移方向就不再改變。圖2為目標海上漂移方向、大小的矢量計算圖。
5 遇險目標漂移位置模型
假定指揮中心接收到的海上遇險目標最后已知位置信息為P(a0,b0),從此刻開始無人機飛行到出事海域航行時間為t,據海洋環境數據查到的海流速度大小為V流,與正東方向為γ,風壓導致漂移速度為V風,與正東方向為α(α≤π 2),左右風壓角為 β,與以P點為原點,正東方向為x軸,正北方向為 y軸,建立直角坐標系[7]。經過t時刻目標的理論漂移位置根據風壓的左右概率50%應有兩個理論基準點,分別是P1(xt1,yt1) 和 P1(xt2,yt2),如圖3。
T時刻,P1( )xt1,yt1坐標應該是:
P1(xt2,yt2)坐標應該是:
最終基準點相對于最后已知位置的確定坐標Pt(xt,yt) 即為
最后經過直角坐標系與大地坐標系的轉換和疊加就能得出遇險目標的經緯度坐標。
6 確定搜尋區域
根據基點Pt( )xt,yt確定搜尋區域,首先以 Pt為圓心,作半徑為搜尋半徑R的圓,然后對該圓的做外切正方形,即為搜尋區域,如圖4。
搜尋半徑R的確定是由總搜尋誤差和搜尋安全系數相乘[10]得到,即:
其中,E為總搜尋誤差,與初始位置誤差E0和搜尋設備位置誤差E1有關。 f0為搜尋的安全系數,它隨著同一區域搜尋次數的增加而增加[11],取值可參考表1。
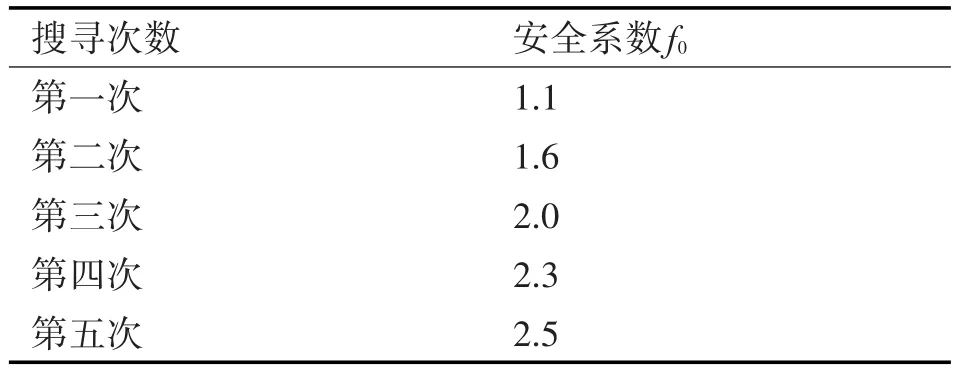
表1 安全因數[12]
總搜尋誤差E為
初始位置誤差為
其中Fx0為搜尋目標定位誤差,取值可參考表2,Rx0為目標航跡推算誤差,大型船一般取推算航程的5%,小型艇一般取15%。搜尋設備及誤差E1=Fx0+Rx0,取值和意義參考初始位置誤差的解釋。
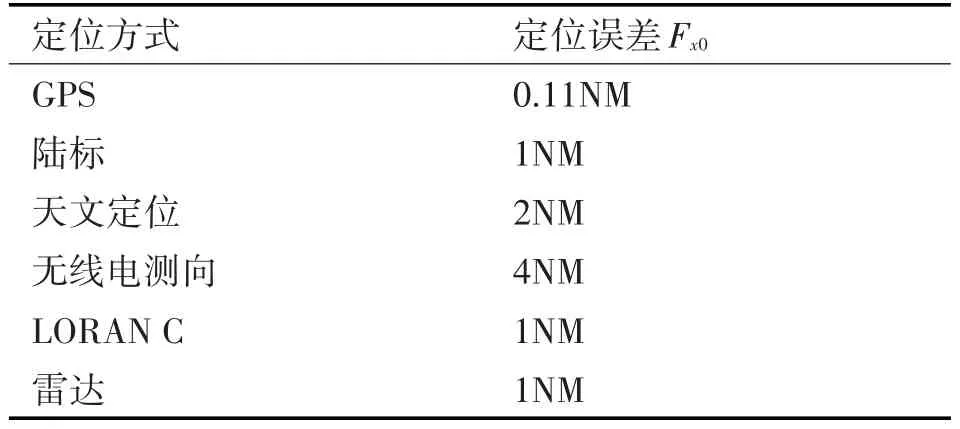
表2 定位誤差
7 結語
快速搜尋發現遇險目標是海上搜救解決的首要核心問題,在分析海上風與流的氣象水文要素特性基礎上,根據海洋風流要素變化和遇險海域風壓差、流壓差的方向和大小,對海上遇險目標進行受力分析,建立了遇險目標漂移模型和風壓模型,以矢量迭加的方法估算出遇險目標海上漂移的方向和速度,通過漂移位置模型,分析估算出遇險目標位置的漂移變化,并進一步求出搜尋半徑,確定最佳有效的搜尋區域。該模型有助于快速制定科學的搜救方案,有效地配備海上搜救力量,降低遇險目標失事風險,具有較高幫助與參考價值。
[1]王亞男.馬航搜救對民航業及我軍裝備發展的啟示[J].國防科技工業,2014(4):22-25.
[2]李小文.海上搜救服務系統有效性評價[D].大連:大連海事大學,2012:1-5.
[3]孔凡郁,阮巍.我國海上搜救管理體系探析[J].水運管理,2004(7):22-25.
[4]王平莊.海南海上搜救概況與分析[J].中國應急搜救,2007(1):12-14.
[5]中華人民共和國海事局.國際航空和海上搜尋救助手冊[S].北京:人民交通出版社,2003:198-206.
[6]梁揮凡.大風浪條件下海上搜救的方法[J].中國應急救援,2008(2):24-25.
[7]于衛紅,賈傳勞.海上搜救中搜尋區域確定方法研究[J].中國航海,2006,67(2):34-37.
[8]Anderson E,Odulo A,Spaulding M.Modeling of Leeway Drift[R].Groton:U.S.Coast Guard Researeh and DeveloPment Center,1998:128-130.
[9]Wang Yi,Fan Wei,etal.Effct of atmospheriec and ground condition on the target-backgound contrast[J].Chinese Journal of Quantum Electronics,2004,21(1):92-97.
[10]R.Koester,D.C.Cooper,Sweep Width Estimation for Ground Seareh and Reseue[R].Potomaemanagement GrouP,Ine,Deeember,2004:53-55.
[11]宋旭升,夏軍等.直升機海上搜救與光電穩定轉塔[J].中國水運,2012(1):109-111.
[12]陳明東.海上搜尋技術研究[D].大連:大連海事大學,2007:62-63.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
