基于圖像識別的太陽能電池片缺陷檢測
2018-01-03 05:46:04秦文麗
設備管理與維修 2017年12期
秦文麗
(北京信息科技大學機電工程學院,北京 100192)
基于圖像識別的太陽能電池片缺陷檢測
秦文麗
(北京信息科技大學機電工程學院,北京 100192)
一種應用于工廠流水線快速分選檢測的方法,即基于圖像識別的太陽能電池片檢測方法。通過顯著圖模型對生產線上的電池片進行圖像采集,通過基于OpenCV的程序對圖像進行處理,得出電池片對應的顯著圖并判斷是否有色斑等缺陷。實驗表明,該方法為快速且較準確地進行分選檢測提供了一種新的手段,較傳統的人工檢測或通電檢測方式有更好的實際應用意義。
圖像識別;Itti模型;顯著圖;OpenCV
10.16621/j.cnki.issn1001-0599.2017.12.12
0 引言
能源短缺和環境污染是當今世界關注的重要問題,由此提出的基于新能源的各類利用方式成為發展和解決問題的主要支撐點。為了更好的利用太陽能這種具有諸多優點的一次能源,太陽能電池片已經廣泛的出現在大眾生活中。一些研究機構在提高太陽能使用率方面也加大了研究力度。從1999年至2009年,全球太陽能電池產量平均年增長率達到48.5%,而最近 5 a,這個數據更是高達 55.2%[1]。
雖然太陽能電池具有成本低、電池使用壽命長、無公害等優點,但生產太陽能電池片的過程中,由于材料和制作工藝等因素,生產的產品中可能有斷角、缺柵、色斑或顏色不均等缺陷。色差類缺陷影響電池片的轉換效率;缺陷類型為缺柵斷線,則可能直接成為廢品。當有色差的太陽能電池片與正常合格品放在一起使用時,將會影響整體的光電轉換效率,所以在太陽能電池片生產后,還要按照同樣的顏色標準進行檢測。
為適合工廠生產自動化的檢測方式,提出一種適用于流水線快速分選檢測的方法,即基于圖像識別的太陽能電池片檢測方法。該方法主要通過顯著圖的方法,先對生產線上的電池片進行圖像采集,再將采集到的圖像傳輸到計算機,通過在Visual Studio程序對圖像進行處理,得出它對應的顯著圖并判斷是否有色斑等缺陷。
1 太陽能電池片缺陷檢測
現代生產太陽能電池片的工藝,會出現不少帶有缺陷的電池片,而這些缺陷不僅對電池片光電轉換率造成影響,從而降低發電量以外,還對整個組件的表面美觀造成一定影響。太陽能電池片的加工工藝流程如圖1所示[2]。

圖1 太陽能電池片加工工藝流程
太陽能電池片缺陷類型[3]:①邊緣漏電——去背結不完全引起的漏電;②前電極燒結過度——電極金屬過于深入發射極易造成漏電;③發射極破損、漿料污染、雜質污染、掛鉤點——易漏電;④裂紋——可見和不易見的微小裂紋;⑤斷柵——細柵局部不連續;⑥網帶印;⑦背場缺陷——鋁背場出現明顯的異常區域;⑧電極接觸不良;⑨無pn結;⑩黑芯片、位錯簇、硅料邊緣缺陷。
對不同缺陷的太陽能電池片的檢測方法,根據是否需要通電,分為通電檢測和非通電檢測;根據主要檢測的缺陷類型分為電致發光檢測、光致發光檢測和紅外測量等方法[4]。E(I電致發光)適用于檢測電池片電不均勻性缺陷,但是EI測試的劣勢為不是總能確定某些缺陷的成因細節[5]。PL(光致發光)測量可用于整個太陽能電池制造過程的缺陷檢測,且該測量有助于研究有材料缺陷或接觸問題引起的太陽能電池功率損耗問題。IR(紅外測量)適用于檢測電池片的短路、分流、不活躍的電池部件或濕氣等,但研究表明[5]并不是所有缺陷都會導致電池溫度的升高,而且正常太陽能電池片在有較高的功率損耗時也會出現熱區。故IR有時并不能正確識別缺陷。
2 顯著圖方法
典型圖像識別系統的基本組成如圖2所示,該系統一般分成2個階段,訓練階段,訓練集經過預處理、特征提取,然后利用提取到的特征學習分類器的參數,在學習的過程中,根據一些反饋信息重新調整預處理和特征提取的方式,直到學習出一個滿意的模型為止[6]。
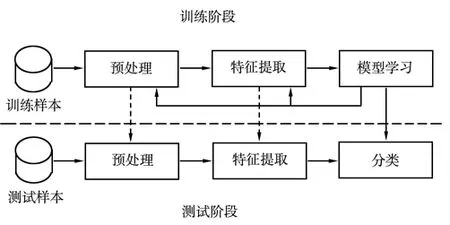
圖2 典型圖像識別系統的基本組成
顯著圖是在視覺環境中表明物體顯著性的一種二維圖像。當觀察一張非純色的圖像時,人的視覺一般會在某些區域先進行觀察,這些區域往往是一些相比與周圍畫面更突出的區域。將較周圍環境突出的區域和觀察者感興趣的區域稱為顯著區域[7]。
Itti模型在顯著圖方法的發展和實現中具有重要意義。該顯著圖模型的具體實現方法如圖3所示,基本過程如下[8]。首先將輸入圖像表示為9層的高斯金字塔,第0層是輸入圖像,第1~8層是5×5高斯濾波器對上一層圖像進行線性濾波采樣得到的,大小為上一層圖像的1/2n。利用中心邊緣算法計算每個特征,中心采用細致標度、邊緣采用粗糙標度。將某一點作為中心,該點的像素相當于金字塔比例 C={2,3,4}而周圍區域的比例為 s=c+d,d={3.4},所以每個特征就會產生6個特征圖。研究中所選的特征為一般視覺特征,即亮度特征、顏色特征和方向特征。因三原色分別是紅、綠、藍,所以將顏色特征劃分為紅綠、黃藍特征。亮度特征相對好提取。方向特征劃分為4個:0°,45°,90°,135°。此時出現42個特征圖。而迭代側抑制方法使每張特征圖中顯著性競爭實例化。競爭實例化后,將每個特征類型的幾個特征圖融合成1個顯著圖。然后再將3個特征顯著圖融合成1個最終的地形顯著圖。這個顯著圖就是實現了刺激整合神經元的二維表。該過程中還有返回抑制機制,該機制的作用是先通過WTA網絡掃描大多數的顯著點或區域并找到注意力趨向的點或位置,找到后通過返回抑制機制瞬時抑制顯著圖中找到的該最顯著點,使注意指針指向下一個最顯著的點,然后相同的方法多次進行。
3 建立模型及具體實現
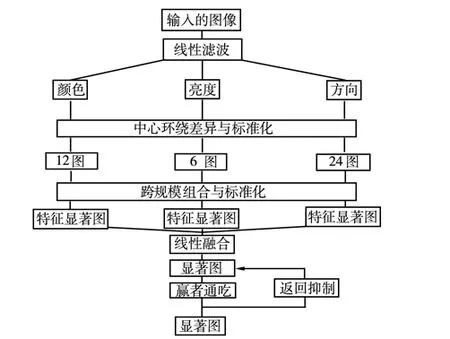
圖3 遺傳算法運算過程
基于Itti模型的基礎提出一種針對檢測太陽能電池片缺陷的模型。為了適合生產線檢測的需要,借鑒傳統的ITTI模型主體思路的基礎上先加入攝像頭采集圖像過程,其次將整體過程劃分為圖像預處理部分、顯著圖計算部分和結果判定部分。通過OpenCV的C++程序編譯,使計算機程序的快速處理滿足工廠生產線流水線快速性、高效性、自動化的要求。
(1)圖像預處理部分。由于圖像在獲取過程中,往往會受到外界因素的干擾,造成實際獲取的圖像信息有所干擾,且需要對整個模型系統進行一個初步的處理,所以需要采用預處理[9]。通過程序調用普通相機攝像頭拍攝流水線上的太陽能電池片,每隔1000 ms進行一次圖像采集,并將采集到的圖像傳送到計算機中,作為程序的輸入,然后在程序中進行檢查是否為空和載入內存操作。
該部分程序的功能是調取攝像頭采集圖像并返回數據。編程方法為先初始化一個capture指針,判斷是否該指針中有數據,若有則通過OpenCV的cvCaptureFromCAM(0)從攝像頭讀入數據并放入capture中;若無則創建視頻文件,然后判斷該指針是否為空,若為空則退出程序;若不為空則將圖像放入Ip1Image類型的以frame命名的內存空間下[10]。
(2)顯著圖計算部分。該模型的主體框架主要由5個模塊組成。即當采集到流水線上太陽能電池片的圖像并進行初步的預處理后,首先進行亮度特征模塊處理,再進行顏色特征模塊處理,方向特征模塊處理;其次進入中心邊緣模塊處理,最后進行特征融合模塊,最終生成顯著圖。
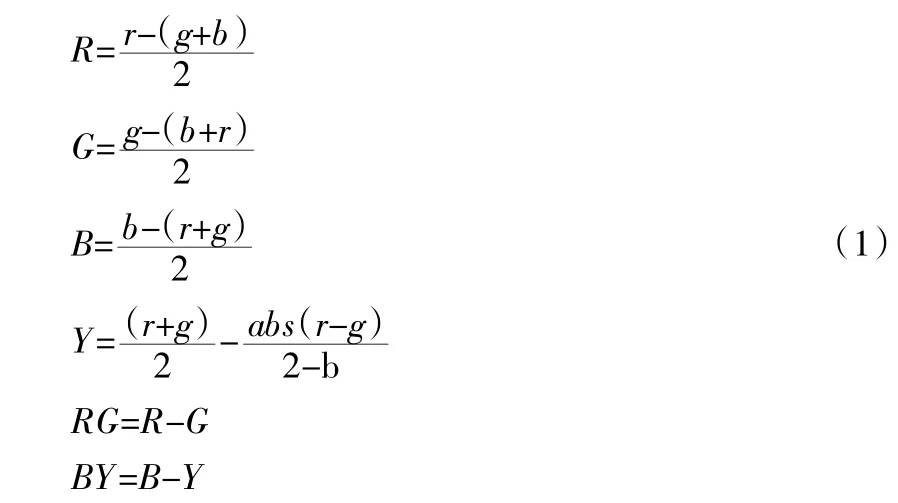
當有原始圖像輸入時,亮度特征通過I=(R+B+G)/3公式計算后得出提取后的亮度特征圖。第二個模塊程序的功能是對亮度特征圖進行處理,提取出一張RG特征圖和一張BY特征圖。編程方法為首先輸入之前處理過的亮度特征圖,然后判斷圖上所有點的值是否小于最大值的0.1倍,若小于則結束該模塊;若大于或等于則重新定義每一點的r,g,b值,且g值和b值算法相同。再通過公式(1)計算求出RG顏色特征圖和BY顏色特征圖。
方向特征模塊的功能是依舊對每張亮度特征圖提取4張方向特征圖。編程方法為輸入亮度特征圖,然后通過filter2D濾波器就可以分別提取出4個不同方向的特征圖。由于信號或圖像的能量平常集中在幅度譜的低中頻段,所以要對圖像進行濾波,抑制較高頻段的噪聲對該頻段有用信息的影響。
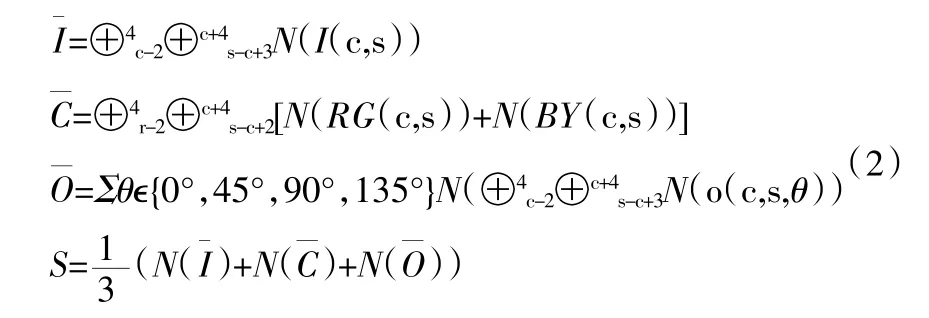
中心環繞模塊即center-surround,該模塊的功能為對上述模塊結果特征圖進行center-surround算法處理,最終得到6幅亮度特征圖、12幅顏色特征圖和24幅方向特征圖。特征融合模塊的功能是首先進行亮度、顏色、方向三大類的自身融合,得到3張特征圖,再融合成最終的顯著圖。具體編程為將標準化后的特征圖統一到σ=4的尺度上相加,用⊕表示,通過公式(2)進行計算提取。
(3)結果判定部分。對生成的顯著圖進行缺陷判斷。若最終的顯著圖上除柵線位置白色區域面積是否大于柵線所占面積來實現。
當得出最終的顯著圖之后,若圖上有顯著區域,即圖中有部分區域內的值大于某一限定值,則對該顯著圖中的顯著區域進行面積計算。將所有顯著區域面積減去柵線面積后判斷是否大于0,若大于則為有缺陷的電池片。上述中的限定值選為0.8。
4 實驗結果及分析
基于建立的模型及對應程序,進行生產流水線檢測模擬。通過在電腦攝像頭前投放不同太陽能電池片來模擬工廠采集圖像過程;當程序處理出對應顯著圖并判斷是否有缺陷后,一次實驗結束,相同方法重復多次。
由圖4可看出,該方法得出了原圖像對應的顯著圖,而且在顯著圖上可清楚地觀察到色斑的位置形狀大小等。而正常的太陽能電池片對應的顯著圖中只有主柵位置較為顯著,其他區域沒有顯著區域。實驗中采集檢測一張圖像的時間為(3~5)s。由此實驗可得出該顯著圖方法對于太陽能電池片缺陷的檢測十分有效,能準確找出電池片上的缺陷位置并最終判斷出該電池片是否為缺陷產品。由于檢測過程的速度較為快速,適合工廠生產流水線的檢測,滿足了預期要求。
運用顯著圖方法進行圖像檢測的優點:①圖像處理較為迅速。由于目前對視覺感受的要求逐漸提高,處理圖像意味著處理大量的信息,對計算機也是復雜的過程;②顯著圖方法可找出圖像中的顯著區域。顯著圖在其他領域的應用效果顯示結果都較為準確。將顯著圖法應用于電池片檢測,實驗表明該方法可行且取得了預期的效果。
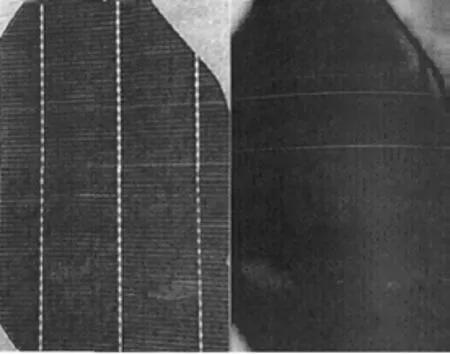
圖4 斷角缺柵的圖像對比
5 結束語
本文利用Itti提出的模型建立既考慮實際應用又保障識別效率、速度等方面的顯著圖模型。實驗結果表明,采用圖像識別的太陽能電池片缺陷檢測,可以對電池片進行有效識別檢測從而達到篩選的目的。圖像識別技術尤其在目前具有更大的提升空間,因為深度學習與神經網絡的發展,圖像識別方法檢測將會具有更廣泛更優化的工廠應用。
[1]童鋼.太陽能電池片分色及缺陷檢測系統的研究[D].南京:江蘇大學.2016.
[2]周達凱.基于VisionPro太陽能電池片外觀檢測系統設計[D].南京:南京理工大學.2016.
[3]王學盂,葉子銳,沈輝,梁璄強,尹浩平.晶體硅太陽能電池缺陷檢測與分類評價體系[J].激光與光電子進展.2013(3):143-147.
[4]陳軍.硅太陽能電池制備過程的全自動視覺檢測設備關鍵技術研究[D].廣州:華南理工大學.2011.
[5]Ebner.R,B.Kubicek,G.Ujvari.Non-destrutive techniques for quality control of PV modules:infrared thermography electro and photoluminescence imaging[J].Conference of the IEEE industrial Electronics Society.2012,Vol.20:8104-8109.
[6]李義.基于相關學習神經網絡的圖像識別方法研究[D].哈爾濱:哈爾濱工業大學.2015.
[7]婁樹旗.基于視覺顯著性的圖像分割方法[D].北京:北京理工大學.2013.
[8]Itti.L,Koch.C.A saliency-based search mechanism for overt and covert shifts of visual attention[J].Vision Research.2000,Vol.40:1489-1506.
[9]韓修禮.面向移動設備的圖像識別算法研究[D].北京:北京交通大學.2016.
[10]Bradski.G,于仕琪(譯者).學習 OpenCV(中文版)[M].北京:清華大學出版社,2009.
TP317.4
B
〔編輯 李 波〕
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
海峽科技與產業(2016年3期)2016-05-17 04:32:12
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52