自動駕駛:近在咫尺,還是遙不可及
2017-12-29 21:00:37冬雪
百科知識 2017年24期
冬雪
人工智能已經演變為爭奪未來的戰略高地,得人工智能者得天下!自動(無人)駕駛汽車是人工智能的代表之一,而且因其實用性更強、經濟增量更大,也更吸引人。2017年10月17日,百度阿波羅(Apollo)與廈門金龍客車簽署戰略合作協議,將于2018年7月小批量生產雙方合作研發的無人駕駛微循環車,隨后投入試運營。這將是國內首個實現量產的無人駕駛客車。然而,要使無人駕駛汽車真正上路,需要在技術、倫理、法律和管理多方面獲得“通關”。那么,通過這些關口有多難呢?
技術的問題首先在分級
百度的無人駕駛汽車如期上路其實很懸。無人駕駛微循環車定位于解決“最后一公里”的出行問題,只在特定環境運營,如大型園區內的接駁車、機場擺渡車、旅游景點的觀光車等。這類場地駕駛環境簡單、路線單一,便于發揮無人駕駛的優勢。盡管如此,法律能否批準仍是一個問題。
汽車帶給人們效率和經濟發展的同時,安全也成為一個大問題,因此,世界上才有浩如煙海的交通法規。把人類掌控的方向盤讓位于人工智能,就等于把人、物和車的安全交給人工智能,顯然,人類并無太大的把握,所以無人駕駛要依據循序漸進的原則。
現在,全世界多數國家都按美國汽車工程師學會(SAE)的標準來對自動駕駛進行分類(如簡表)。相比完全靠駕駛員自己操控的傳統駕駛(L0),L1級的自動駕駛能給駕駛員一些幫助。例如,今天已經在很多車上搭載的自適應巡航(ACC)功能能通過雷達探測與前車的實時距離自動控制加減速,從而保持與前車的安全距離。
L2的標準是,汽車除了具備L1級描述中的自適應巡航外,還具備車道保持(LKA)功能或者自動變道功能。也就是說,系統除了能控制加減速,還能對方向盤進行控制。不過,人仍然是駕駛環境的觀察者。
L3級最大的不同在于,道路環境的觀察者由人變更為人工智能系統。系統已經完全能夠識別出直線、彎道、紅綠燈、限速路牌以及路上行走奔跑的人與動物等各種環境。環境觀察和駕駛操作均由系統來完成。此時仍需要駕駛員,以對所有的系統請求進行應答。如突然下雨地面濕滑是否需要減速,前方車輛行駛過慢是否需要超車,前方有人在車道較近處走動是否需要鳴笛提醒等,這些請求系統會反饋給駕駛員,由其決定。
L4級的駕駛操作和環境觀察仍然由系統完成。但是,在L3的基礎上,人不需要對所有的系統要求進行應答,只需要在某些復雜地形或者天氣惡劣的情況時,才由人對系統請求給出決策,其他情況下系統能獨自應付,自動駕駛。
L5級是指車上沒有方向盤、剎車、油門和駕駛員,乘客盡管放心地在車上睡覺、玩手機,系統操作應對一切,直至到達目的地提醒乘客下車。
顯然,L5級自動駕駛才是真正的無人駕駛。現在,世界上最先進的自動汽車才達到L2,要達到L5還有很長的路要走。世界多數車企,如福特、豐田、本田、寶馬、沃爾沃等公司提出的目標是在2020年前后量產能夠達到L3級的自動駕駛汽車。比照上述標準,百度的無人駕駛微循環車并非完全意義上的自動駕駛。
自動駕駛安全嗎?
以特斯拉的Autopilot為例,它是一個自動駕駛軟件,配備于特斯拉的一款稱為Model S的汽車上。2016年5月7日,美國人約書亞·布朗駕駛Model S在一處雙向高速公路上行駛時,與一輛拖掛車相撞,不幸身亡。這是全球第一起因自動駕駛而致死的事故。
事后,美國國家高速公路交通安全管理局(NHTSA)針對Autopilot功能展開調查。經過半年的調查,NHTSA于2017年1月19日宣布,未發現Autopilot功能存在問題,同時不會要求特斯拉對汽車進行召回。NHTSA的結論是,特斯拉Autopilot不是完全自動駕駛系統,它根本無法應對所有路況,司機不應該依靠它來防止此類事故。
裝備Autopilot的Model S屬于自動駕駛L2級,離完全自動的L5級差得太遠,并且布朗本人有太多疏忽。事發前37分鐘的行程中,布朗的手僅有25秒被檢測到手握方向盤。Autopilot自動輔助駕駛系統向布朗發出了多次視覺警告、鈴聲警告及語音警告,但布朗均無動于衷。在車禍發生時,布朗的汽車時速超過限速,而且他本人正在車上觀看哈利·波特電影。
除了人禍之外,自動駕駛技術并非沒有缺陷。盡管Autopilot開啟了功能并提醒布朗注意,但強烈的日照和拖掛車白色車身讓Autopilot系統攝像頭短暫“失明”,未能夠在白天強光下及時發現拖車白色側面的反光,導致在自動駕駛模式下的剎車功能未能緊急啟動,使得兩車直接發生撞擊。
特斯拉公司也向美國高速公路交通安全管理局下屬的缺陷調查辦公室提供了配置Autopilot技術的Model S和Model X等汽車在2014~2016年期間所有行駛里程和安全氣囊相關的數據。調查人員利用這些數據計算了Autopilot系統安裝前后的撞車率,得出特斯拉安裝了Autopilot系統后汽車更安全的結論。NHTSA也承認,自從特斯拉汽車于2015年安裝了Autosteer(方向盤自主轉向)軟件以來,特斯拉汽車的撞車率已經下降了40%左右。Autosteer是Autopilot系統的功能之一,能夠讓特斯拉汽車保持在自己的車道上行駛,即使遇到彎道仍能夠讓汽車自行轉彎。
美國2016年的統計表明,美國公路上因交通事故喪生的人數超過35000人,其中94%的事故是因司機失誤導致的。但是,美國特斯拉的車主使用自動駕駛儀(只是L2級)的行駛距離超過2億千米,才只出過一次致死事故。毫無疑問,無人駕駛汽車的安全性高于人類的老司機。
自動駕駛面臨的倫理難題
即便所有的技術難題都能解決,自動駕駛也不會100%的安全,總會出錯,這就涉及一個問題,如何在發生事故前躲避?避免事故的智能軟件設計也就面臨倫理難題。
有調查發現,駕駛員在右前方有障礙(人和物)時一般是往左打方向盤,反之則往右打方向盤,這是一種本能的下意識舉動。當然,更有可能是因車速太快和事發突然而來不及做出規避反應。但是,自動駕駛汽車卻要面臨一種選擇,即“電車難題”,最早由英國哲學家菲利帕·福特在1967年發表的《墮胎問題和教條雙重影響》中提出。
“電車難題”是這樣的:假設5名無辜的人被綁在電車軌道上,一輛失控的電車朝他們駛來,片刻后就要碾壓到他們。不過,你可以拉一個拉桿,讓電車開到另一條軌道上。但是,另一條軌道上也綁了一個人,你面臨兩個選擇:不拉桿,5人死亡;拉桿,1人死亡。你會怎么做呢?按利益最大化或損失最小化,多數人都會選擇拉桿,讓1人死亡救5人。但是,1人死亡還是殺了人,也躲不過良心的譴責。
一旦自動駕駛汽車上路,必然面臨這種倫理難題,并且,人工智能的設計可能會陷入無盡的矛盾中。例如,如果是以死人的多少來設計人工智能的操作程序,那么接下來是否還會根據年齡、性別、地位的高低來選擇“拉桿”?面對一位孕婦和一位老人,汽車出事前該撞向誰?
無人駕駛就是迫使人工智能把人分等級,按人的多與少、高貴與貧賤來選擇,所以躲不開功利主義。當然,這種功利主義還是人的選擇,因為智能軟件是人設計的。不過,人工智能的選擇有時也許要優于人的選擇。比如,在面臨5人與1人時,如果人類駕駛員看到的那1人是自己的親朋,或許會選擇沖撞陌生的5人,但無人駕駛汽車只會按設計的救多數犧牲少數的程序來行事,所以似乎顯得更公平。
現在,新的研究還顯示,無人駕駛面臨更復雜的倫理選擇,例如在將要發生事故時,是拯救車上的乘客還是挽救路人。法國和美國的研究人員合作在2016年6月24日的《科學》雜志上發表了幾項研究結果。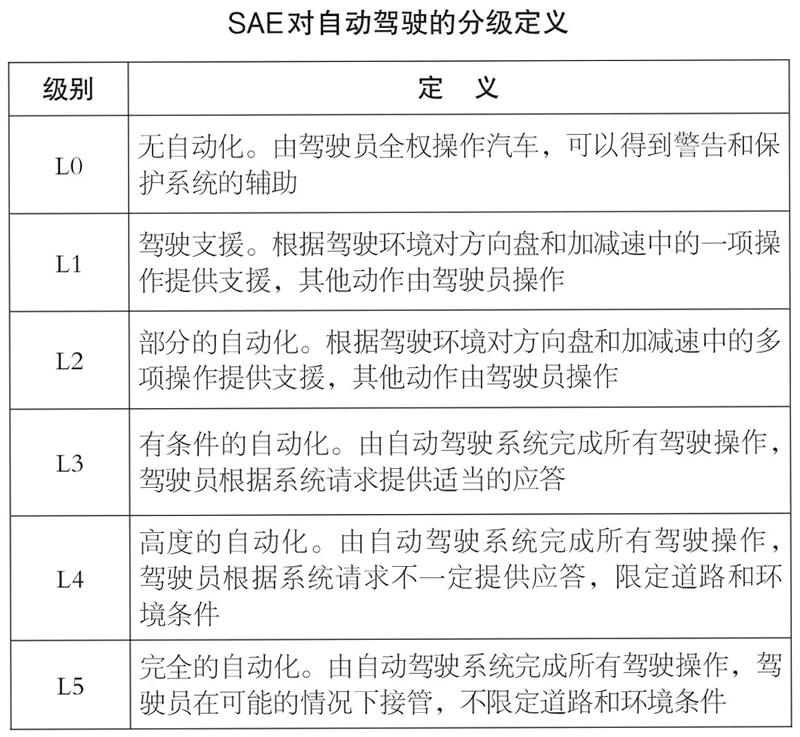
其一,假如存在一場不可避免的事故,是救乘客還是路人?研究人員在線咨詢了451人,當車上只有一名乘客并且只有一名行人時,75%的受試者表示應該救乘客。但是當行人的數量增加時,受試者開始轉變立場。如果有5名行人和1名乘客,50%的受試者表示應該救乘客。當行人人數達到100人,乘客是1人時,有80%左右的受試者表示要救行人。
其二,研究人員詢問了259人,自動駕駛汽車是否應該給車輛設定程序以保護“人數更多的一方”?結果以100點評級方式來衡量,受試者對這一問題的平均支持點數為70點。但是,當被問及他們是否愿意購買犧牲駕駛員的車輛時,其興趣大幅下降,支持點數僅為30點。
上述研究結果反映了人們對于自動駕駛汽車的矛盾心態。人們并非接受保護多數人的觀點,而是趨向于保護車中的乘客,哪怕車上的乘客明顯少于行人。同時,人們又支持為車輛設定程序以保護人多的一方,但不太愿意購買有可能犧牲駕駛員的車輛。
所以,對自動駕駛汽車是人為設定程序還是讓其自主決策,以及“電車難題”是否會造成自動駕駛汽車的困境,莫衷一是。不過,在討論自動駕駛的倫理難題時,有人提出了兩個關鍵點。一是不能把人的生命交由人工智能來處置,即自動駕駛的系統編程不應在人的生命中進行挑選,也不應該在受害者中進行抵消,但自動駕駛應秉持損害最小化原則;二是自動駕駛應避免陷入“電車難題”。從車輛的設計和編程開始,就應考慮以一種具備防御性和可預期的方式駕駛,自動駕駛應重在完善技術,并通過可控交通環境的應用、車輛傳感器、剎車性能、危險情況中給受威脅者發出信號提示、通過“智能”道路基礎設施等來預防危險,最大程度地增強道路安全性,避免兩難局面的發生。
然而,要實現這兩點除了不太可能外,還陷入自相矛盾之中,例如,不應在自動駕駛的編程中涉及功利主義的程序,但又要求自動駕駛應秉持損害最小化原則,后者本身就是功利主義選擇。
法律對自動汽車開了一個口子
人無論做什么事情,都要對結果負責,所以有自然人和法人的負責形式。但是,自動駕駛沒有人,其運營和出了事后誰負責呢?在沒解決這個問題之前,1968年聯合國制定的道路交通公約規定,汽車的控制者必須是人而非電腦。
不過,法律是人制定的,也是隨時代發展而變化的,為適應自動駕駛汽車上路,一些國家已經解凍自動駕駛汽車的法律,允許自動駕駛汽車有條件地上路。自動駕駛汽車上路最大的法律基礎或法理是,把研發、生產自動駕駛汽車的人員和機構作為責任人(法人)。盡管如此,現今的法律也只是有條件地允許自動駕駛汽車上路,主要是測試。
2017年10月12日,美國加利福尼亞州車輛管理局宣布,從2018年6月起允許沒有方向盤、制動踏板、后視鏡和沒有駕駛員的無人駕駛汽車在道路上進行測試,允許公眾乘坐配有無人駕駛技術的車輛。所有上路測試的自動駕駛汽車都屬于L3級自動駕駛汽車,在某些情況下依然還需要人工干預。此外,美國國會正考慮立法,允許廠商生產和部署沒有踏板和方向盤的非傳統類型汽車,同時還允許各州政府制定單獨的自動駕駛監管法案。
相比而言,德國的法律更進了一步。2017年5月12日,德國聯邦參議院通過首部自動駕駛汽車的法律,允許汽車自動駕駛系統未來在特定條件下代替人類駕駛。這部法律首先明確了法律責任,如果在人為駕駛的情況下發生事故,駕駛人承擔事故責任;如果是人工智能系統引發事故,將由汽車制造商承擔責任。
判斷人為駕駛還是自動駕駛將由汽車上安裝的一個類似黑匣子的裝置來確認,該裝置可以記錄系統運作、要求介入和人工駕駛等不同階段的具體駕駛情況,以保證在出現交通安全事故時,明確責任劃分。
當然,德國的這部法律也還沒有涉及自動駕駛的最高級L5級,該法律規定駕駛席必須有司機,并且要保留方向盤、油門和剎車等配置,以保證在自動駕駛系統出現故障的情況下,駕駛者能及時介入,并且在何時能讓自動駕駛汽車上路也語焉不詳。
2017年10月14日,日本國土交通省首次推出了關于自動駕駛的安全標準。規定必須搭載一種功能,在路上自動行駛時,當司機手離開方向盤15秒以上,自動系統將發出警告;如繼續保持手離開方向盤的狀態,50秒后自動駕駛系統將停止,切換為手動駕駛。
顯然,德國的自動駕駛汽車的法律最開放,但時間未定,美國次之,日本的基本還算不上自動駕駛法規。中國目前尚無自動駕駛汽車的法律。因此,無論是國外還是國內,自動駕駛汽車上路和運營還有漫長的路要走。
【責任編輯】龐 云
猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
法律方法(2021年3期)2021-03-16 05:57:02
商界(2019年12期)2019-01-03 06:59:05
IT經理世界(2018年20期)2018-10-24 02:38:24
小康(2017年16期)2017-06-07 09:00:59
南風窗(2016年19期)2016-09-21 16:51:29
公民與法治(2016年4期)2016-05-17 04:09:26
山東青年(2016年1期)2016-02-28 14:25:30
中國衛生(2015年1期)2015-11-16 01:05:56