張力腿平臺長距離濕拖研究
2017-12-24 13:28:17魏佳廣李懷亮黃山田張立邦王浩宇
石油工程建設 2017年6期
魏佳廣,李懷亮,黃山田,張立邦,王浩宇,李 可
海洋石油工程股份有限公司,天津 300461
張力腿平臺長距離濕拖研究
魏佳廣,李懷亮,黃山田,張立邦,王浩宇,李 可
海洋石油工程股份有限公司,天津 300461
TLP平臺的海上運輸、安裝均屬高技術、高風險、高難度作業,其長距離濕拖則更具挑戰性。以流花油田某TLP平臺長距離濕拖為例,在給出了適應中國海域TLP平臺長距離濕拖設計嘗試方案的基礎上,計算了TLP平臺的拖航力,配置了濕拖資源(包括拖輪選型及配合方式),并對整個運動過程進行了數值分析。模擬計算結果表明,該嘗試方案給出的關鍵設計參數均滿足設計要求,可為我國TLP長距離濕拖工程實踐提供指導。
TLP平臺;長距離濕拖;拖航阻力;運動分析
世界淺海油氣資源日益枯竭,深水已成為油氣儲量和產量的主要接替區。在“十二五”期間之前,我國海洋油氣資源開發主要集中在渤海、黃海、南海西部等淺海區域,我國海洋工程實踐經驗僅局限在300 m水深之內,此水深范圍的工程設計、建造、安裝、運行和維護等方面的技術與國外基本同步。隨著淺海石油天然氣資源勘探開發的日益枯竭,深水油氣開發是世界油氣開發的大勢所趨[1],“十三五”期間我國深海油氣資源開發也將迎來空前的發展良機。
目前應用于深水開發的浮式系統主要有SPAR、SEMI、FPSO、TLP四種結構形式[2]。TLP(Tension Leg Platform)平臺作為國際上深水油氣田開發設施中的一種重要形式,在國外已有近30年的應用歷史,目前全球有近30座TLP平臺在使用,而TLP平臺的海上運輸、安裝在我國尚屬首次。TLP平臺無論是模塊的重量、結構型式等自身條件,還是水深限制等外部條件,其長距離濕拖及海上安裝都存在著極大的技術與風險挑戰[3]。
本文基于流花油田某TLP平臺前期工程設計研究,主要從TLP的基礎參數、濕拖影響因素、拖航阻力、濕拖運動分析及濕拖方案設計等幾個方面,針對TLP平臺的安裝難點之一長距離濕拖進行研究,為工程實踐提供理論指導。
1 流花油田TL P平臺簡介
流花某油田位于中國南海珠江口盆地,油田水深約403.7 m,油田開發的前期工程設計方案中首次考慮在國內應用TLP平臺。流花油田TLP平臺由上部組塊、浮體(hull)、張力腿(tendon)、頂張力井口立管和樁基礎(foundation pile) 構成[4],其概念設計的主要組成及各部件參數見表1。本刊2017年第4期的文章中對該平臺的概況已有介紹[5],本文著重研究該平臺的長距離濕拖運輸工藝。
2 某TL P平臺濕拖方案設計
2.1 濕拖路線
流花油田某TLP平臺假定于青島船塢建造,并從青島碼頭濕拖至流花油田現場,濕拖航程約1 400 n mile,屬于長距離濕拖。濕拖對航線的選擇、航速的設計、主拖資源的配置、應急預案的制訂要求非常高。其濕拖路線主要途徑青島港、渤海、上海、舟山港、臺灣海峽、終至南海流花目標油田。濕拖工藝流程主要為:青島船塢出港→青島外錨地傾斜試驗→TLP平臺調載(轉換為濕拖模式,吃水與TLP出港時吃水設計不同)→濕拖拖帶系統連接及濕拖準備→主拖輪濕拖TLP平臺至流花油田現場→TLP海上安裝。TLP平臺濕拖路線示意見圖1,濕拖參數見表2。
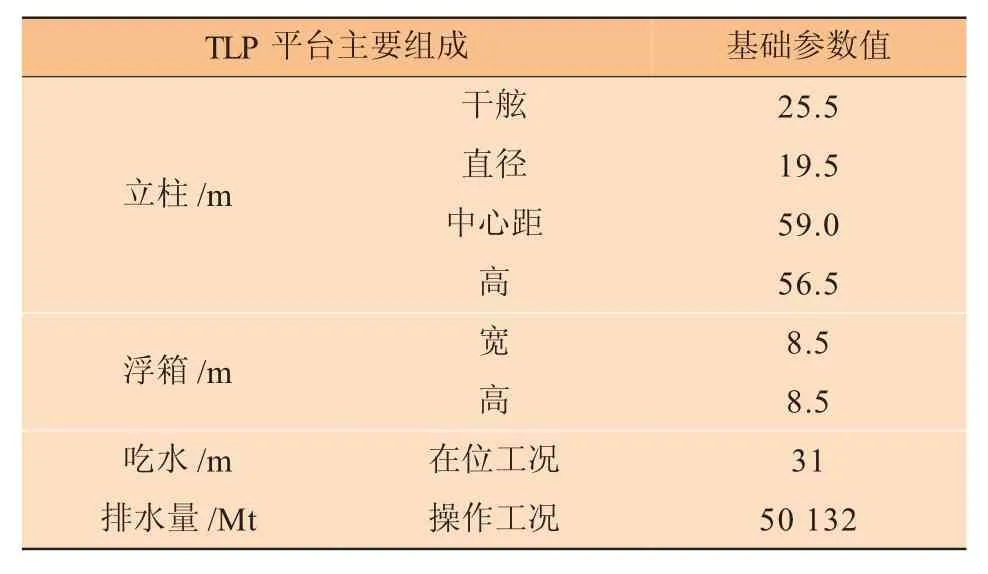
表1 TL P平臺基礎參數
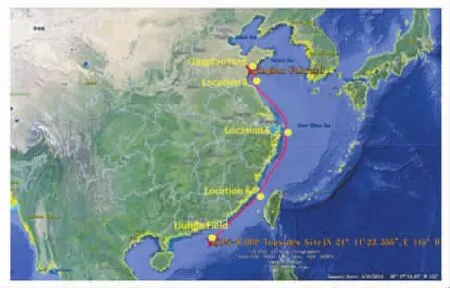
圖1 流花TL P平臺濕拖路線示意
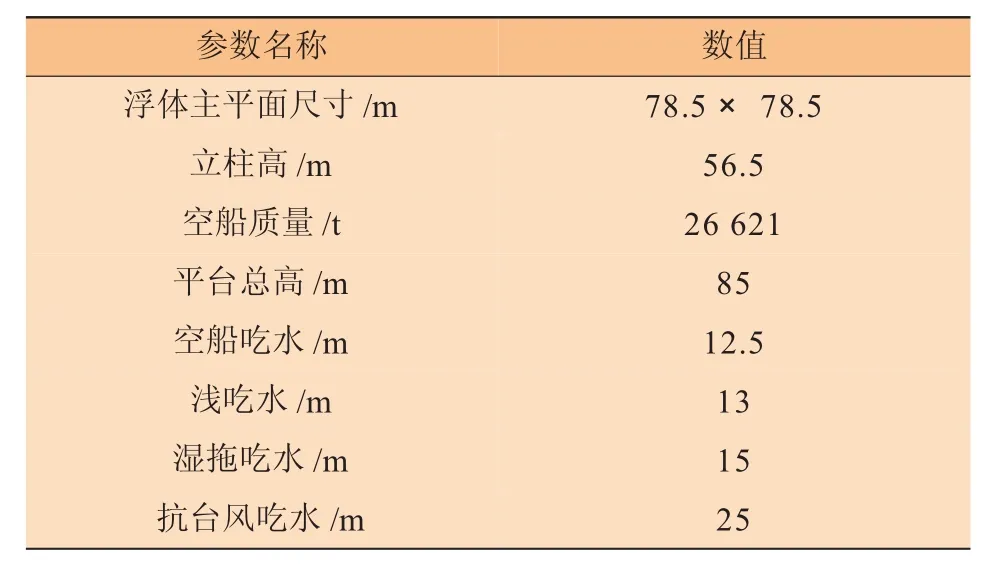
表2 流花TL P平臺濕拖參數
2.2 濕拖阻力及資源配置
濕拖阻力的分析對于濕拖資源配置、濕拖速度的設計、工期的預估、方案的制訂非常關鍵。主拖輪的拖航能力取決于濕拖阻力的大小,一般來說,濕拖阻力由三個因素組成:風載荷、流力和平均漂移力,TLP平臺拖力的設計就是要考慮克服這三部分的阻力,此外還要留有一定的安全系數。
TLP平臺濕拖計算的環境條件取10年一遇的極端海況環境條件[6],見表3,并以此確定拖輪資源配置(拖輪選型)。張力腿平臺可以采用平行拖拉方式,也可以采用對角方向拖拉方式,對角向拖拉方式比平行拖拉方式通常需要更大的拖力。
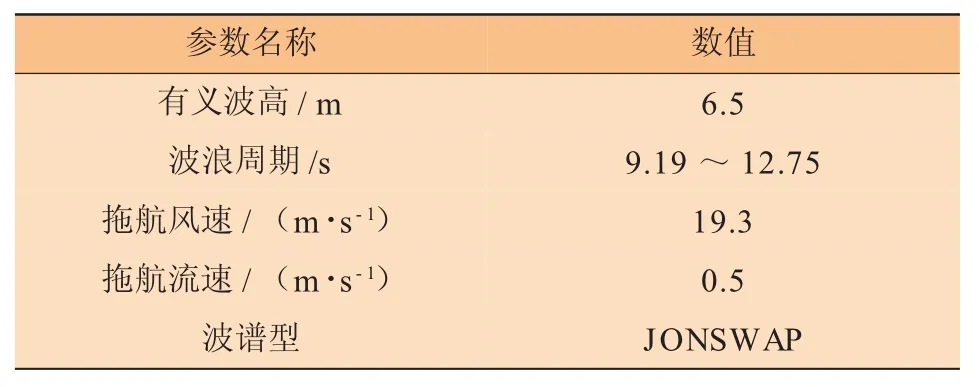
表3 TL P濕拖環境條件(10年一遇)
根據上述濕拖環境條件,計算流花TLP平臺濕拖吃水15 m時拖航阻力與速度的關系曲線,見圖2。
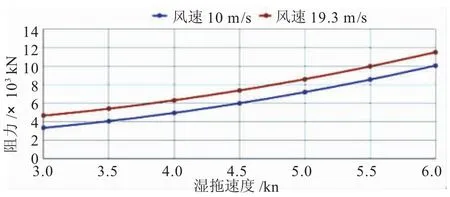
圖2 TL P平臺濕拖阻力與拖航速度的關系
由上述計算結果可知,當濕拖速度分別達到3、4、5 kn時,對應拖航阻力分別達到4 640、6 310、8 600 kN,若按照濕拖5 kn航速來算,則所需拖航系柱拉力大于8 600 kN,再考慮80%的效率,可得系柱拉力不得小于10 750 kN。據此配置拖輪資源,根據國內大部分拖輪資源的系柱力設計規格,可選擇采用3條拖輪主拖TLP的方式進行濕拖,見表4、圖3。
2.3 運動分析
青島至流花油田航程約1 400 n mile,按照平均拖速4 kn計算,航行時間約15 d,因此長距離濕拖需要制訂多種風險應急預案,以確保安全、順利濕拖TLP平臺至油田現場。

表4 TL P拖輪配置

圖3 TL P平臺濕拖方式
拖航過程中最常出現的情況是迎浪,即波浪從船首到船尾,為使計算結果更加全面可靠,對±45°方向來波情況也需要計算[7]。圖4為TLP模型,圖5為橫搖運動的幅值響應函數RAO分析結果。
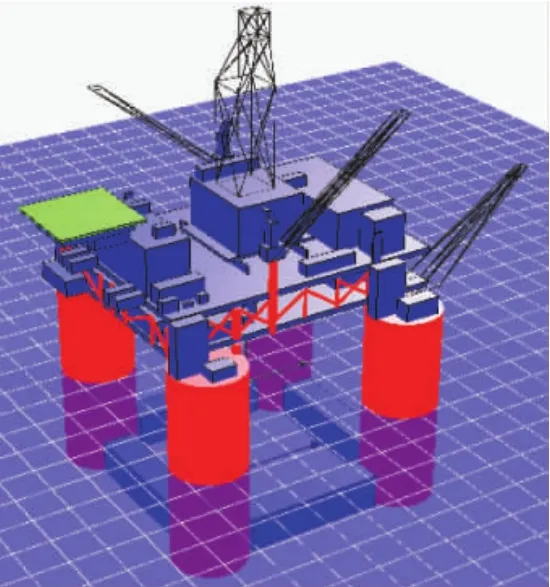
圖4 TL P平臺模型

圖5 TL P平臺運動分析
從上述計算結果得到,對于10年一遇的非颶風環境工況,最大橫傾角7.69°,TLP平臺上部鉆機重心最大橫向加速度為0.180 g(g為重力加速度);對于10年一遇的颶風環境工況,最大橫傾角7.94°,TLP平臺上部鉆機重心最大橫向加速度為0.183 g,平臺的傾斜和搖晃均已經考慮在橫向和縱向加速度中。針對15 m吃水在非颶風工況下和25 m吃水在颶風工況下作了分析,按照GLNoble Denton規范,為保證TLP平臺在10年一遇颶風環境中能穩定住,所需要的最小系柱拖力為2 690 kN。因此應根據平臺的搖晃、升沉起伏情況,選擇好的天氣窗口濕拖TLP平臺。
3 結束語
本文以流花油田某TLP平臺長距離濕拖為例,在嘗試給出了適應中國海域的TLP平臺長距離濕拖設計方案的基礎上,計算了TLP平臺的拖航力,配置了濕拖資源,并對整個運動過程進行了數值分析。模擬計算結果表明,嘗試給出的關鍵設計參數均滿足設計要求,可為我國TLP長距離濕拖工程實踐提供指導。
[1]段夢蘭,陳永福,李林斌,等.海洋平臺結構的最新研究進展[J].海洋工程,2000,18(1):86-90.
[2]張智,董艷秋,唐友剛,等.1990年后世界TLP平臺的發展狀況[J].中國海洋平臺,2004,19(2):35-39.
[3]劉錦昆.深水油氣田開發海工平臺設施及其應用[J].中國造船,2009,50(11):58-64.
[4]馮加果,王世圣,李新仲,等.張力腿平臺濕拖完整穩性及破艙穩性研究[J].中國海洋平臺,2011,26(3):40-46.
[5]魏佳廣,劉浩,黃山田,等.基于半潛船的TLP平臺干拖運輸研究[J].石油工程建設,2017,43(4):37-40.
[6]喻西崇,謝彬,金曉劍,等.國外深水氣田開發工程模式探討[J].中國海洋平臺,2009,3(6):52-56.
[7]李新仲,王桂林,段夢蘭,等.深水油氣田開發中的浮式平臺新技術[J].中國海洋平臺,2010,4(8):36-41.
Research of TLP long distance wet-towing
WEIJiaguang,LIHuailiang,HUANG Shantian,ZHANG Libang,WANG Haoyu,LIKe
Offshore OilEngineering Co.,Ltd.,Tianjin 300452,China
TLP platform is an important type of floating system in the international deepwater oil and gas field development.The offshore transportation and installation belongs to high technology,high risk and difficulty,especially for long distance wet-towing of TLP.The triallong distance wet-towing scheme of the Liuhua Oilfield TLP is designed to suit China sea area conditions.The towing force calculation,tugboat selection and cooperative wet-towing operations are studied,and the whole motion process during TLP wet-towing is numerically analyzed.The results show that the key design parameters of the trial wet-towing scheme meet the design requirements and have a certain reference for the TLP long distance wet-towing project in China.
TLP;long distance wet-towing;drag force;analysis of motion
10.3969/j.issn.1001-2206.2017.06.013
國家科技重大專項經費資助、工信部“500 m水深油田生產裝備TLP自主研發”資助。
魏佳廣(1986-),男,甘肅白銀人,工程師,2011年畢業于遼寧石油化工大學化工過程機械專業,現主要從事海洋石油平臺等設施安裝設計及相關技術研究工作。Email:weijg@mail.cooec.com.cn
2017-10-02
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
水利規劃與設計(2017年8期)2017-12-20 08:24:07
水利規劃與設計(2017年8期)2017-12-20 08:24:02
海峽姐妹(2017年7期)2017-07-31 19:08:17
水利規劃與設計(2017年6期)2017-07-18 10:56:26
Coco薇(2017年5期)2017-06-05 08:53:16
家庭影院技術(2017年12期)2017-02-06 02:32:16
水利建設與管理(2015年10期)2015-05-09 08:29:47
