光伏電站巡檢機器人電磁導航系統設計*
2017-12-20 08:29:16蘭建軍李春來劉寅東
電測與儀表 2017年9期
蘭建軍,李春來,劉寅東
(1.東北電力大學自動化工程學院,吉林 吉林132012;2.國網青海省電力公司電力科學研究院,西寧810008)
0 引 言
為了保證光伏電站可靠高效運行,需要電站巡檢員定期檢查組件積灰,鋼化玻璃變色、破損等情況。隨著變電站的無人值守化的逐步推進,光伏電站現場的機器人巡檢也將成為一種趨勢。由于巡檢機器人的運行軌跡相對固定,因此電磁導航方式是一種低成本、高可靠性的導航方式[1-2]。電磁導航研究早期,主要以位置和方向檢測為主[3],隨著應用的不斷普及,目前該技術逐步轉向了自由空間場的定位和導航應用[4-5],該技術實用性強,具有良好的發展前景。為了保證電磁導航機器人沿著預定的電磁軌道可靠運行,電磁軌道的磁場信號檢測與轉向控制是電磁導航機器人研究的重點。伍洲等進行了電磁傳感器IIR濾波器的設計,改善了傳感器數據的線性度[6],黃水提出了基于模糊控制的舵機轉向控制算法,改善智能車的動態性能[7]。唐昊等通過三次多項式曲線擬合方式進行了機器人位置解算,較好的完成了電磁導航機器人的轉向控制[8]。
為了進一步準確獲取巡檢機器人偏離導航信號線距離,實現巡檢機器人轉向的準確控制。文章在現有電磁導航理論的基礎上,在機械結構上設置了8個對稱分布的電感傳感器進行電磁導航巡檢機器人的信號檢測,利用數據加權融合算法對傳感器的數據進行融合,準確計算出巡檢機器人的轉向角度。最后在設計的巡檢機器人裝置上對方案進行了效果測試,給出了實驗測試數據。
1 檢測原理與傳感器布局
1.1 磁場檢測原理
依據麥克斯韋電磁場理論,交變電流周圍會產生交變的電磁場。可以在輪式機器人運行軌道上敷設導線,導線上輸入20 kHz頻率信號后產生交變磁場,利用該磁場作為輪式機器人的路徑導航信號。磁場的信號檢測利用電感實現,通過LC諧振電路進行選頻,通過濾波電路濾除干擾信號,導線磁感應強度計算圖如圖1所示。
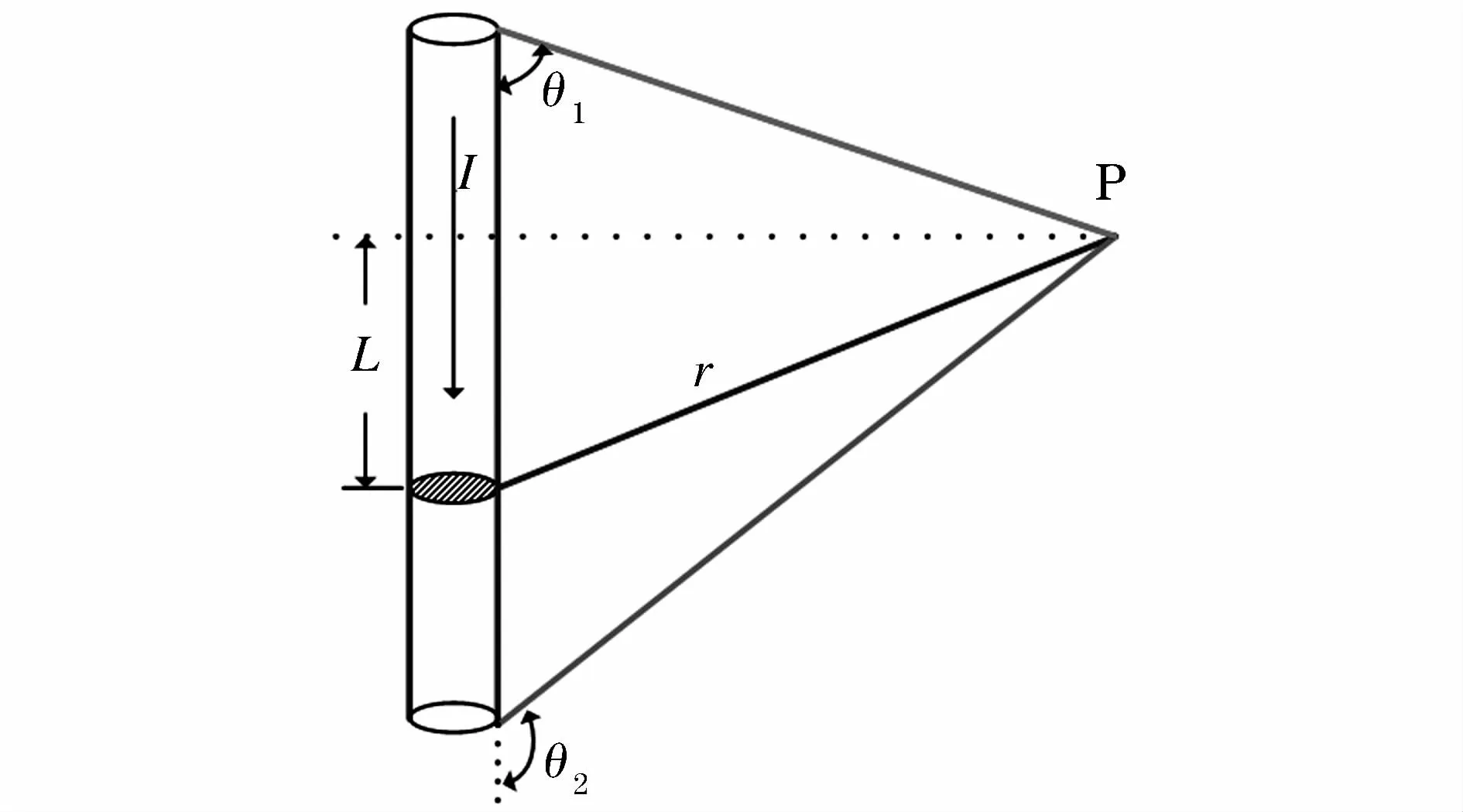
圖1 直線電流磁場計算Fig.1 Linear current magnetic field calculation
依據畢奧-薩伐爾定律可以將距離導線距離為r處P點的磁感應強度推導如下:

對于無限長的導線來說,式中θ1可近似為0,θ2可近似為π,所以磁感應強度B可近似為:

當電感線圈的軸線為水平方向時,設電磁感應線圈中心軸線距離地面的垂直距離為h,水平距離為x時,可以將感應電動勢推導如下:

1.2 傳感器布局
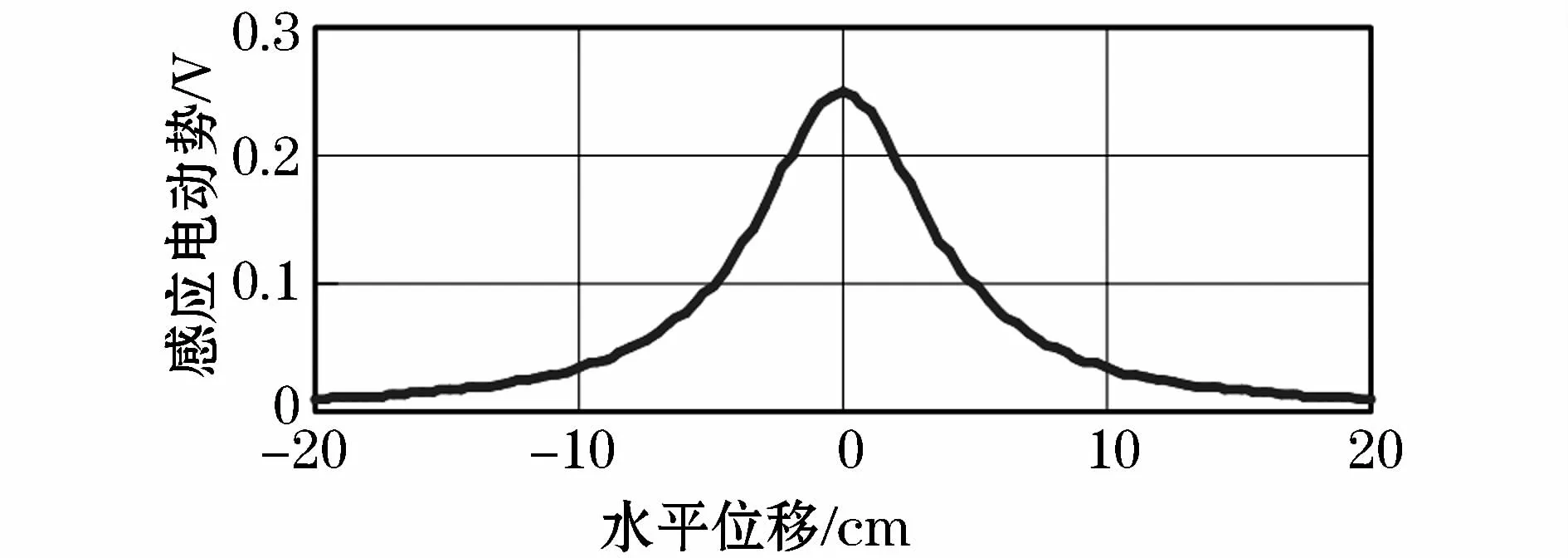
圖2 感應電動勢變化趨勢Fig.2 Development trend of induction electromotive force
當垂直距離固定后,感應電動勢隨水平距離變化趨勢圖如圖2所示。根據圖2所示的曲線變化趨勢可知,當水平偏移距離在4 cm之內時,電感的感應電勢和距離偏移關系趨近于線性。為了提高傳感器輸出的線性程度,傳感器在布局時,兩個電感傳感器中心距離為3 cm,在傳感器支架中心左右兩側共安裝有8個電感傳感器。
2 信號采集與處理
2.1 信號檢測與采集
電感傳感器選用10 mH的工字型電感,可以較好的感應交變電流產生的磁場。通過LC諧振電路實現選頻,經過TLC2274放大后,可以得到50倍以上增益,可以實現距離在15 cm以上距離的可靠檢測,并且有較好的線性度,詳細的傳感器檢測電路原理圖如圖3所示。
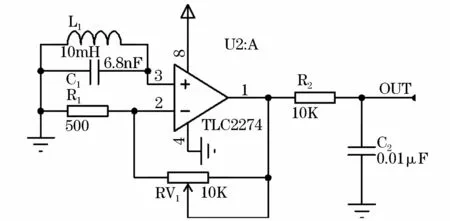
圖3 傳感器檢測電路原理圖Fig.3 Principle diagram of sensor detection circuit
2.2 信號濾波處理
由于電感和后續處理電路等特性不一致的問題,使得不同傳感器在同一高度和同一位置處檢測值不同,如果不進行處理,后續將產生轉向控制誤差。因此首先要對傳感器的輸出值進行歸一化標定,這樣每路傳感器輸出值都歸一化到統一量綱,保證傳感器輸出值只與偏移位置有關,與傳感器及其配套處理電路特性差異無關,歸一化公式如下:

式中VLi為第i個傳感器歸一化后值;adi為第i個傳感器A/D轉換之后值;max為標定的最大值;min為標定的最小值。
3 數據融合算法
3.1 支持度矩陣
數據融合技術是對多源的、多形式、多層次的信息進行有效綜合應用的一種數據綜合處理技術[10-11]。利用n個傳感器從不同方位對同一參數進行測量,設 xi(k)和 xj(k)分別為第 i個和第 j個傳感器在k時刻的測量值,如果二者測量值間相差較大,表明該時刻2個傳感器的觀測值相互支持度較低;相反,如果二者很接近,則表明傳感器的觀測值相互支持度高,將多傳感器測得數據間的這種支持程度定義為支持度。同時,為統一量化處理,利用模糊集合理論中的隸屬函數可將k時刻的支持度函數sij(k)描述如下:

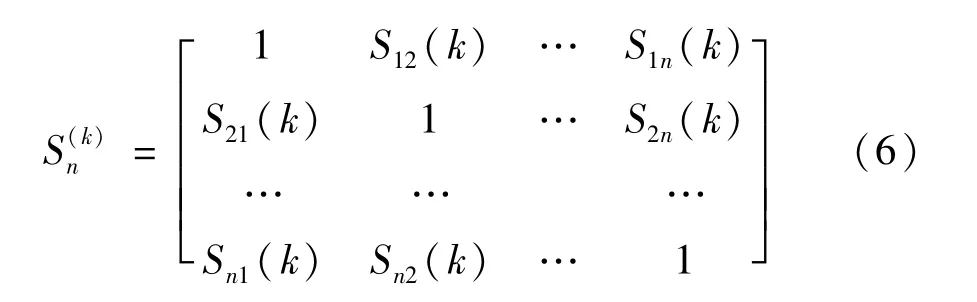
為了衡量傳感器測量值之間的相互支持度,可將k時刻傳感器數據支持矩陣由sij(k)進行構造:
3.2 加權數據融合
為了使測量結果更加準確,需要對多個傳感器的數據進行融合,令wi(k)為k時刻第i個傳感器測量數據xi(k)在融合過程中所占權重,因此可以利用wi(k)對 xi(k)進行加權求和[13],同時對加權系數wi(k)限定條件如下:

這樣多個傳感器在k時刻最終的數據融合值表達式如式(8)所示,通過采用不同的加權系數,保證數據融合結果更加準確。

3.3 加權系數確定
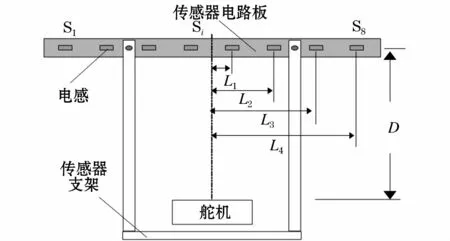
圖4 傳感器布局結構Fig.4 Sensor layout structure
圖4所示為傳感器布局結構圖,8個電感傳感器對稱分布,右邊4個傳感器和小車中心線距離分布為L1、L2、L3、L4,舵機離電路板垂直距離為 D。舵機轉向最大角度為±57°,因此可以根據傳感器偏離中心位置距離L設置加權系數。由于傳感器對稱分布,因此傳感器S1和S8到電路板中心距離均為L4,通過反正切的形式分別計算需要轉換的角度,根據轉換角度計算加權系數。具體的機械參數和加權系數對應關系如表1所示。
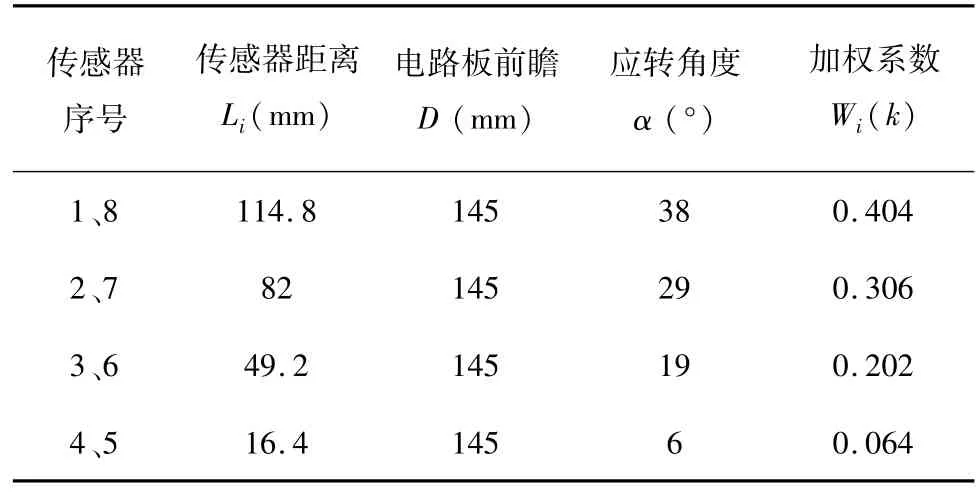
表1 機械參數和加權系數對應關系Tab.1 Corresponding relationship between mechanical parameters and weighting coefficient
4 實驗數據與效果
為了驗證方案的可行性,將小車傳感器中心置于信號線正上方作為0點處數據,之后對傳感器電路板進行左平移和右平移(保證信號線處于單個傳感器正上方或者在兩個相鄰電感的中心位置)。依次分別記錄下8個傳感器的測量數據,將數據進行歸一化處理后進行加權融合。得到如圖5所示的位置-轉向角度關系曲線,依據數據曲線可知,加權融合后的位置-轉向角度曲線和實際位置-轉向曲線基本吻合,表2給出了實際位置-轉角角度和融合位置-轉向角度數據,并進行了誤差分析,分析表明,經過數據加權融合后的角度符合精度要求。
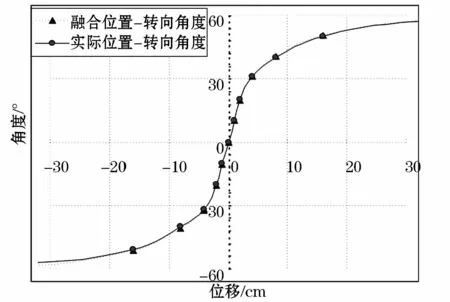
圖5 位置-轉向角度關系曲線Fig.5 Relationship curve between position and steering angle
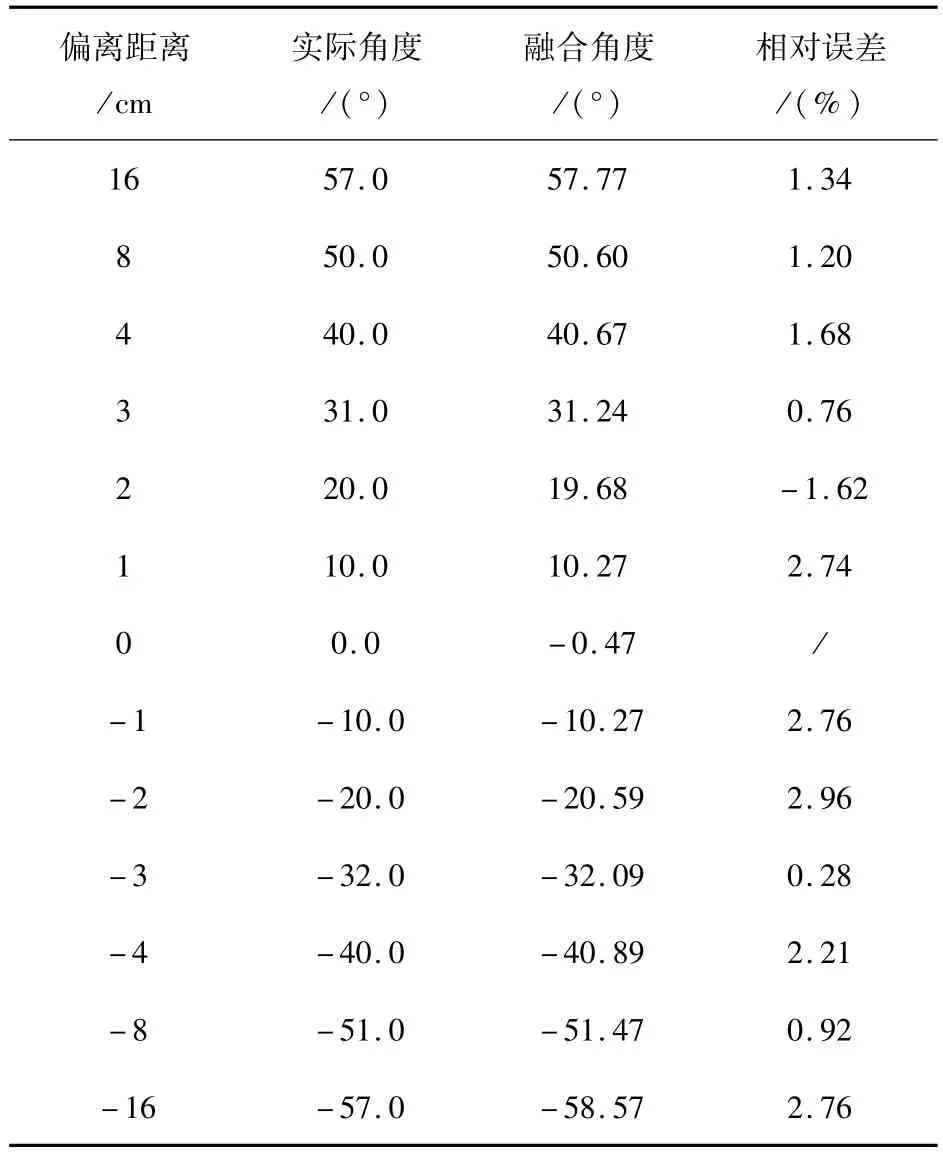
表2 測試數據與誤差分析Tab.2 Test data and error analysis
5 結束語
依據電磁檢測原理,設計了光伏電站巡檢機器人的電磁導航系統。為了保證巡檢機器人實現精確的轉向控制,依據機械結構完成加權系數的設定和計算,采用數據加權融合算法對傳感器數據進行了融合。方案可以根據機器人偏離航線距離準確計算出機器人的轉向角度,獲取了數據加權融合后的位置-轉向角度曲線,并進行了誤差分析。實驗數據表明,該方案可以實現機器人轉向角度的準確測量,測量相對誤差在3%以內,滿足控制精度要求。
猜你喜歡
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
今日農業(2021年19期)2022-01-12 06:16:36
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
無線電工程(2020年11期)2020-10-29 01:25:46
