一種采摘機器機械手的控制系統設計
2017-12-19 09:19:59胡尕磊
科學與財富 2017年33期
關鍵詞:設計
胡尕磊
摘要:水果采摘費用高且勞動量大,為快速且正確完成采摘作業,需要加快研發采摘機械手設計。本文以蘋果采摘機械手運動控制為研究對象,對機械手進行運動學分析與建模,設計并實現了基于PLC的蘋果采摘機械手運動控制的實驗系統,可為其他類型采摘機械手設計提供一定參考作用。
關鍵詞:機械手運動控制;建模;設計
引言
隨著社會經濟的快速發展,農業生產正朝著規模化、多樣化、精確化方向發展,農業勞動力的成本迅速上升,勞動力不足的現象日趨明顯,在此背景下,機器人技術越來越受到了人們的關注。但是,目前國內的采摘自動化程度仍然很低,尤其是采摘機器人的關鍵部位——機械手,為此,本文以PLC 控制器作為控制中心,對蘋果采摘機械手運動控制系統進行設計,旨在提高采摘自動化及降低人工成本,為種植戶帶來最佳的經濟效益。
1.蘋果采摘機械手運動控制系統整體設計
1.1運動控制系統設計要求
蘋果采摘機械手包括手臂和手腕兩個執行部分,機械手準確采摘目標果實,需要靈活的避開途中障礙物,而實現該功能需要依靠機械手的自由度。一般情況下,采摘機械手運動范圍取決于手臂自由度,為了使機械手靈活、運動范圍大,手臂至少需要3個以上自由度。同理,采摘機械手手腕是用來控制機械手空間姿態的,為了使其獲取更多運行姿態,手腕也至少需要3個以上自由度。
蘋果采摘機械手運動控制系統先從上位機或人機交互界面接受指令,然后驅動對應伺服電機,從而使末端采摘執行器準確采摘目標蘋果。
1.2運動控制系統整體設計
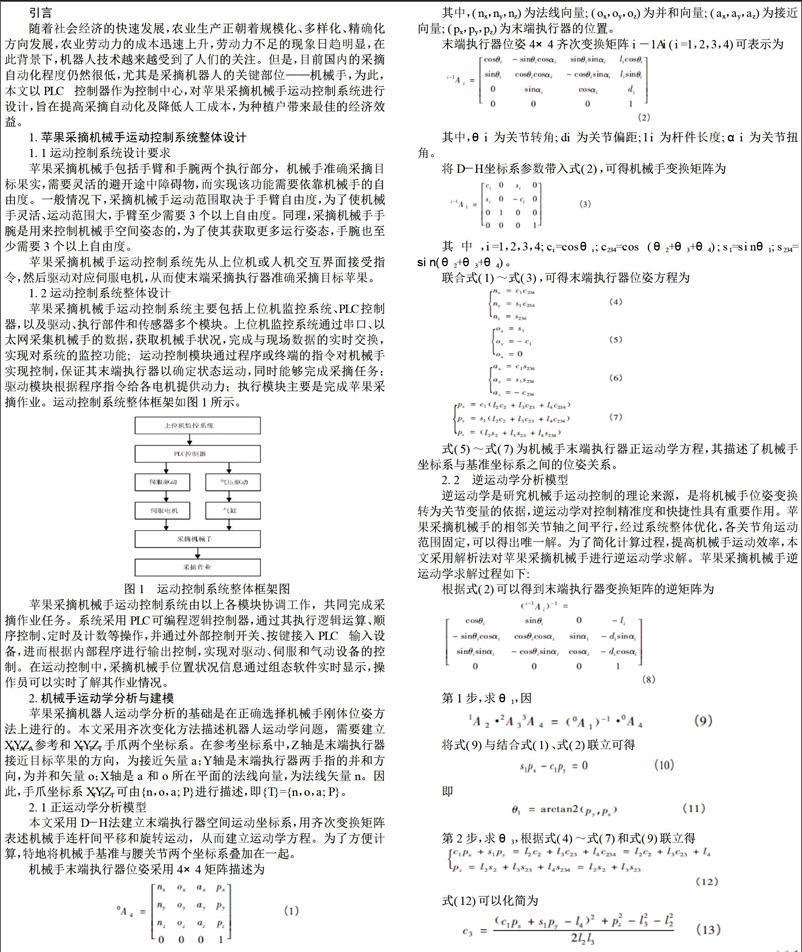
蘋果采摘機械手運動控制系統主要包括上位機監控系統、PLC控制器,以及驅動、執行部件和傳感器多個模塊。上位機監控系統通過串口、以太網采集機械手的數據,獲取機械手狀況,完成與現場數據的實時交換,實現對系統的監控功能;運動控制模塊通過程序或終端的指令對機械手實現控制,保證其末端執行器以確定狀態運動,同時能夠完成采摘任務;驅動模塊根據程序指令給各電機提供動力;執行模塊主要是完成蘋果采摘作業。運動控制系統整體框架如圖1所示。
蘋果采摘機械手運動控制系統由以上各模塊協調工作,共同完成采摘作業任務。系統采用PLC可編程邏輯控制器,通過其執行邏輯運算、順序控制、定時及計數等操作,并通過外部控制開關、按鍵接入PLC 輸入設備,進而根據內部程序進行輸出控制,實現對驅動、伺服和氣動設備的控制。在運動控制中,采摘機械手位置狀況信息通過組態軟件實時顯示,操作員可以實時了解其作業情況。
2.機械手運動學分析與建模
蘋果采摘機器人運動學分析的基礎是在正確選擇機械手剛體位姿方法上進行的。本文采用齊次變化方法描述機器人運動學問題,需要建立XAYAZA參考和XTYTZT手爪兩個坐標系。在參考坐標系中,Z軸是末端執行器接近目標蘋果的方向,為接近矢量a;Y軸是末端執行器兩手指的并和方向,為并和矢量o;X軸是a和o所在平面的法線向量,為法線矢量n。因此,手爪坐標系XTYTZT可由{n,o,a;P}進行描述,即{T}={n,o,a;P}。
2.1正運動學分析模型
本文采用D-H法建立末端執行器空間運動坐標系,用齊次變換矩陣表述機械手連桿間平移和旋轉運動,從而建立運動學方程。為了方便計算,特地將機械手基準與腰關節兩個坐標系疊加在一起。
式(5)~式(7)為機械手末端執行器正運動學方程,其描述了機械手坐標系與基準坐標系之間的位姿關系。
2.2 逆運動學分析模型
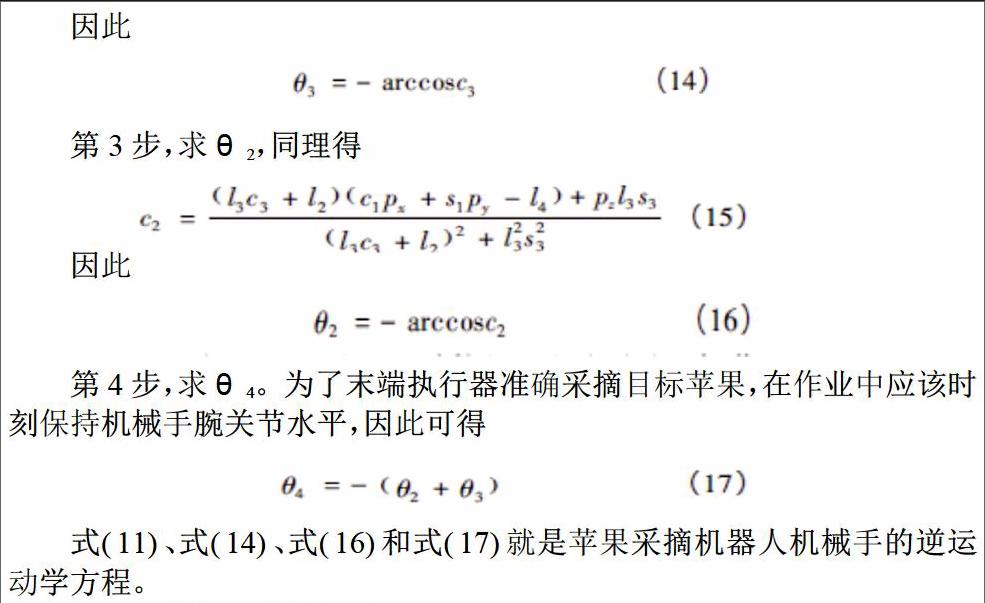
逆運動學是研究機械手運動控制的理論來源,是將機械手位姿變換轉為關節變量的依據,逆運動學對控制精準度和快捷性具有重要作用。蘋果采摘機械手的相鄰關節軸之間平行,經過系統整體優化,各關節角運動范圍固定,可以得出唯一解。為了簡化計算過程,提高機械手運動效率,本文采用解析法對蘋果采摘機械手進行逆運動學求解。蘋果采摘機械手逆運動學求解過程如下:
根據式(2)可以得到末端執行器變換矩陣的逆矩陣為
3.運動控制硬軟件設計
3.1硬件設計
該機械手控制系統主要由PLC、監控圖像管理、觸摸屏、行走電機驅動板、執行機構電機驅動板和伺服電機組成。整個控制系統采用三菱公司FX2N-48MT-DPLC控制器,該處理器具有40個I/O端子(24個輸入點、16輸出點),點數余量充足,系統采用編程語言簡單,開發周期短。因此,PLC控制系統比較穩定,可靠性強、費用低、抗干擾性強。監控圖像管理系統采用Windows操作系統、PCI總線、單屏操作方式,并融合了圖像通信技術,可以實現對圖像的輸入輸出、圖像文件的存儲與加載,以及對機械手的監測和控制;觸摸屏控制器的作用操作員可以人為控制機械手進行采摘作業,能夠準確地控制機械手的運行速度和距離;行走電機驅動板和執行機構電機驅動板分別給行走設備和機械手各伺服電機提供動力。
3.2軟件設計
軟件設計是整個系統正常運行的核心,硬件搭建好后,可以根據蘋果采摘特性,通過設計好的軟件算法控制機械手的運動。
3.2.1人機界面
為了更好地實現對機械手的控制,特地設計了人機界面,該部分能夠實現操作人員與機械手之間的信息交換。本文主要設計了示教和軌跡規劃兩個界面,示教界面如圖2 所示。手動界面可以根據目標果實和機械手的相對距離調節X、Y、Z 軸。在控制過程中,首先選取節點值,然后設置三軸的運動方式,末端執行器運動到目標位置,則按下停止鍵;若存在偏差,則繼續調整。
3.2.2軌跡規劃界面
手動示教界面設定好后,就需要進行機械手軌跡規劃。軌跡規劃界面如圖3 所示。軌跡規劃界面有10個運動順序方框,和右邊10個步驟選擇一一對應,節點選擇與手動示教界面一一對應。
為了檢驗蘋果采摘機械手運動控制系統的可靠性,特將該系統應用到蘋果采摘實驗中。實驗中,設定機械手運動速度上限為200mm/ s,加速度為50mm/s2。首先根據采摘要求設定手動示教界面,然后進行軌跡規劃,軌跡規劃運動順序方框節點設置為1→2→0→0→0→0→0→0→0。按5 段S曲線加減速算法,根據PLC智能控制器計算,可以從控制器得到T1、T2、T3時間值,如表1所示。機械手運動控制從節點1運行到2,X、Y、Z 軸運行情況如表2所示。
實驗結果表明:采用PLC控制器的蘋果采摘機械手軟硬件均能正常運行。該系統具有可靠性高、實時性和穩定性好等優點。實驗數據說明伺服系統脈沖定位精度在一個脈沖以內,能夠精準地定位機械手運動軌跡和位置;此外,人機交互界面人性化程度高,可以比較直觀地顯示和修改運動控制流程。
4.結論
總而言之,采摘機械人在解決勞動力不足、降低采摘成本、提高勞動生產率、保證果實的適時采收以及提高產品的國際競爭力等方面具有很大的潛力。因此,我們必須加快對采摘機器人的研究,使其為我國農業的生產和發展做出重大貢獻。本文對機械手進行運動學分析與建模,設計了基于PLC的蘋果采摘機械手運動控制系統。實驗結果表明,該系統具有可靠性高、實時性和穩定性好等優點,可以幫助采摘機器人快速識別目標并進行正確采摘作業,大大提高了采摘效率,具有廣闊的應用前景。
參考文獻:
[1]蔡明學.基于PLC的搬運機械手運動控制系統設計[J].智慧工廠.2016(12):61-63
[2]張建寶.草莓采摘機械手結構設計與運動控制研究[J].河北農業大學.2016endprint
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04