一種基于監控視頻的車速測量方法
2017-12-14 05:46:48于子凡
數碼設計 2017年6期
于子凡*
(武漢大學遙感信息工程學,湖北武漢,430079)
一種基于監控視頻的車速測量方法
于子凡*
(武漢大學遙感信息工程學,湖北武漢,430079)
本文提出了一種模版匹配用于道路實時平均車速測量的方法,其特點是:不再進行復雜的運動目標檢查與跟蹤,不受光照、氣候、車輛差異等外部條件變化影響。介紹了該方法的原理、計算方法和必要的外部條件,并用交通監控視頻驗證了該方法的有效性。
交通監控視頻;車速測量;模版匹配
引言
及時提供城市各道路實時車速,可以方便司機做出道路選擇,總體上有利于整個城市交通均衡,提高城市信息化和服務水平。前提是實時測量車速。測量車速方法可以分為三類[1-3]:基于地感線圈,基于聲、光、電、磁感應器,基于監控視頻。前兩類方法需要加裝設備,實施起來投入巨大。基于視頻的方法利用現有的城市交通視頻監控系統,既節省了設備投資,又挖掘了現有設備的潛力,因此研究的焦點逐漸集中于基于監控視頻的方法。
基于視頻測量車速常見方法是在視頻中取出一定時間間隔的圖像幀,在它們中提取出同一移動目標,測量它們的位移量。童劍軍[4]以車燈為目標計算車速,但攝像場景限定為一個車道寬度。徐偉[5]以檢測與跟蹤圖像中汽車的Harris角點計算車速,但實驗場景中只有一輛汽車,當場景中汽車數量增加、光照條件變化,都可能影響特征點的匹配與跟蹤。高浩軍[6]以整輛車為目標計算車速,但攝像機安放在與汽車行進方向水平垂直位置,與道路交通監控攝像頭有較大差異。提取和分割運動目標的這類算法很容易受到光照、霧霾等時間、氣候因素的影響,為了消除這些影響,又要設計出大量的處理方法[7],增加了計算復雜度。
如果以提供車輛實時流速為目的,不必采用復雜的目標跟蹤,特定目標的速度不代表群體的速度,而且各種車輛和環境因素的巨大差異給算法帶來的困難很難克服。倒是采用的方法必須適應不同光照條件、不同氣候條件、不同車輛數量的差異帶來的變化。
本文基于這樣一個情況:成像時間間隔很短的兩幀影像,光照環境條件相同,背景部分幾乎沒有變化,有變化的部分只是由于目標移動造成的,并且移動目標位移量不大,大部分目標都能在兩幀影像上出現。本文的思路是將一幅影像分成大小相同的模板,將所有的模板在另一幅影像上進行模板匹配,找到匹配點。只要模板大小設計合適,不論場景中車輛的類型、數量有多么不同,都不影響模板匹配的總體效果。每一對匹配點計算一個速度值,所有匹配對的速度平均值作為該道路的實時車速。
1 時序影像獲取方法
視頻是一系列等時間間隔獲取的圖像幀組合起來的。不同格式的視頻文件組織數據的方式不同,必須根據視頻文件的數據結構,獲得需要的圖像幀。本文試驗視頻從常用前景檢測數據庫[8]中選取的視頻 highwayII-raw.avi,利用OpenCV開源軟件提供的函數cvQueryFrame從視頻中提取時間間隔為0.12秒的圖像幀。從highwayII-raw.avi視頻中提取出來的是24比特彩色BMP影像,為了減小計算量,將它們轉化為8比特灰度圖像,轉化的方法是將每個像素的紅綠藍三個分量取平均值作為該像素的灰度值。處理完畢的兩幅影像如圖1所示,它們的尺度為320x240。20x240
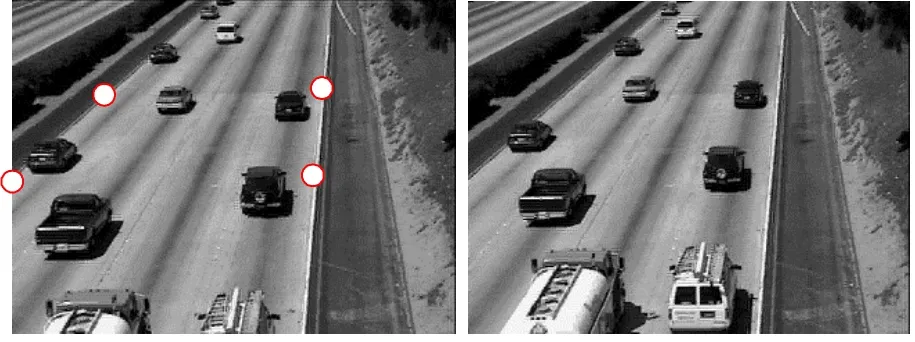
圖1 序列影像中時間間隔為0.12秒的兩幅影像
2 影像動目標位移信息獲取
即將左邊影像劃分成一系列 32x32大小的模板,每次用一個模板在右邊影像上邊移動邊計算匹配相關系數,計算公式如下[8]:

其中,xi代表模板像素值,代表整個模板像素均值;yi代表模板覆蓋影像像素值,代表模板覆蓋區域影像像素均值。隨著模板移動,每個模板對應一系列相關系數。取相關系數最大位置為最佳模板匹配位置,每個模板都可以在右影像中找到一個最佳匹配位置。模板在左影像中的位置與右影像中的最佳匹配位置形成一對匹配點。為了直觀顯示,將每一對匹配點用直線連接,并剔除線段長度小于3的匹配結果,得到的模板匹配結果如圖2所示:
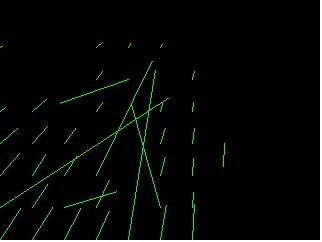
圖2 模板匹配結果
對比圖1,可以看到有錯誤匹配結果。產生原因:一是模板與自身的匹配。完全由背景組成模板,沒有運動目標干擾,與自身的匹配系數很容易達到最高。不需要這種匹配結果,通過剔除匹配線段長度小于3可以消除。圖2中已經經過這種處理。二是出現張冠李戴匹配結果,原因是背景和目標的相似性。圖2中較長的線和方向差異太大的線就是錯誤的匹配結果。可以在計算速度過程中通過設置差異閾值加以剔除。
3 速度計算方法
3.1 動目標實際位移計算方法
計算速度,要將影像上的位移換算成實際路面上的移動距離,要完成像點到物點的坐標轉換。本文關心的是目標實際移動距離,建立的坐標系以方便計算為主要考量。以影像左下角作為像片坐標原點、水平向右為X軸、垂直向上為Y軸建立像片坐標系。假設公路路面為一個平面,在這個平面上建立路面坐標系:坐標系原點為攝像頭對該平面的垂直投影點,以公路向前方為Y軸,以公路橫截線向右為 X軸。需要根據一些已知條件,建立這兩個坐標系的變換關系。
這是平面到平面的透視投影變換關系,可以用簡化的三點共線方程表示,公式如下[9]:
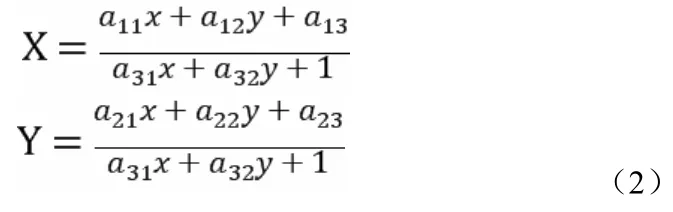
其中,(x,y)為像點坐標,(X,Y)為像點(x,y)對應的路面點坐標。在變換公式中存在a11,a12,a13,a21,a22,a23,a31,a32一共8個未知變量需要求解。由于除了監控視頻文件外,缺乏內外方位元素和監控場景等一切相關信息,只能通過估計至少4個參考點一些點坐標的方式獲得這8個參數。
觀察圖1影像,場景主要由4車道公路路面和右側硬路肩組成,路面坐標Y軸基本處于右側硬路肩1/3分界線上。根據《公路工程技術標準(JTG B01-2014)》,可以獲得公路和車輛的基本參數。高速公里車道寬度為3.75米,右側硬路肩寬度為3米,高速公路監控立桿高度為6.5米。場景中出現最多的轎車一般具有如下尺度:車寬約1.8米,車高1.4米,長度范圍4.6~5.3米。選4個參考點如圖1左像片圓圈所示,它們的路面坐標需要通過觀察估算出來。觀察圖1像片,像片底線對應的路面直線與路面坐標系X軸平行,監測像片底線處監測俯角約為30度,因此這條直線與X軸的距離估計為6.5/tg30°≈10.2米。在這些數據基礎上,考慮場景中汽車的長度和間距,參考點的像點坐標和對應點在路面坐標系中的估計坐標如表1所示。

表1 設定的密應點坐標
將公式(2)變形,得到公式(3)

將表1中四個參考點的對應坐標代入公式3,得到8個方程。用矩陣表示:

其中,A是8x8常數矩陣,B為8個常數組成的列向量,X是8個未知系數組成的列向量,即X=[a11a12a13a21a22a23a31a32]T。由公式4可以計算出8個未知系數:

至此,可以使用公式3完成從像片坐標系到路面坐標系的坐標轉換。
利用公式3,將圖2中線段端點坐標變換到路面坐標系中,并計算線段長度,并轉化為時速。表2是圖2中有效匹配模塊的坐標變換和速度計算結果。

表2 匹配模塊計算速度
3.2 錯誤速度剔除
正常情況下,移動目標速度的大小和方向很接近。表2數據表明,錯誤匹配計算的速度在大小和方向上與多數情況有較大差距,可以利用它,排除錯誤匹配。錯誤匹配結果的數量無法事先估計,采用一次剔除一個的方式。具體方法是先求所有值的平均值,再去掉與平均值差異最大的那一個,并循環這個過程,直到個體值與平均值小于閾值為止。順序是,先用方向值,再用速度大小值。閾值采用經驗值,方向值的閾值是正負30°,速度大小值的閾值是平均值的正負20%。圖3顯示了剔除處理后的匹配結果,計算的平均速度為81.3公里/小時。
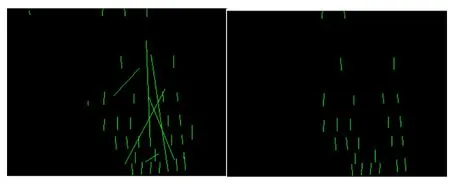
圖3 匹配結果處理前后密比圖
3.3 汽車高度密汽車位置的影響
公式2反映的是平面對平面的透視變換關系。但汽車是有高度的,影像中的汽車并不是位于平面中,而是在平面之上,其關系如圖4所示。
圖中C是視點,它的高度是H,CA是視線。沿著該視線,認為看到的是A點,據此測出的表明其位置的長度是OA。實際上,由于高度h的影響,沿該視線看到的是B點,它的對應位置B’,OB’才是汽車距離原點的精確位置。由圖可以很容易求出:

即根據公式2計算的理論長度需要乘上一個系數1-h/H就能修正高度h造成的影響。考慮到路面坐標系的原點就設置在該圖中的 O點之處,汽車實際坐標值、乃至最終計算出的速度值只需要乘上系數1-h/H就得到修正。
前面已經介紹,高速公路攝像頭高度H為6.5米,汽車的高度h則取決于汽車車型,它是根據通過的車型不斷變化的。考慮到公路上大多數車輛為轎車,就以轎車的高度1.4米確定h值。這樣,剛才計算的81.3公里/小時就修正為64.2公里/小時。
4 實驗
理論上,將上述過程結合起來,采用如下循環:系統設置一個計時器以獲取當前準確時刻,取當前時刻的兩幀圖像?模板匹配?匹配結果轉換到路面坐標系?剔除不合理匹配結果?計算并顯示平均速度,就能實現道路實時車速監控。但試驗中發現模板匹配時間太長,需要約90秒。如果以這么長的時間間隔給出車速信息,實時車速名不副實。上述模板匹配實驗中,在整個影像范圍內尋找匹配點。大部分汽車都在某個速度上限以下,且只沿道路方向運動。根據影像中道路方向的變化范圍,將匹配搜索點限制在以模板為起點的一個扇形范圍內,如圖5所示。根據圖1所示的匹配狀況,確定匹配范圍的虛框定為50x50。具體地,如果模板的左下角坐標為(x,y),則匹配搜索范圍為左下角(x-20,y)、右上角為(x+30,y+50)的窗口范圍內。經過這樣的處理,匹配時間大幅縮短,能夠以5秒的間隔提供公路車速信息。
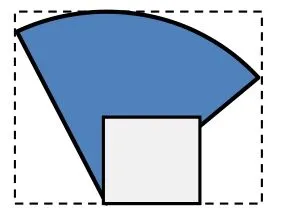
圖5 模板匹配搜索苝圍
5 結束語
此方案只適合于攝像頭靜止不動的情況。如果攝像頭有任何方向的轉動,表1所示的對應點的像點坐標必然發生變化,從而導致映射關系發生變化。表1中控制點的坐標依靠觀察圖像進行估計,既不準確,也不便于實際操作。如果事先為每個攝像頭建立路面坐標系,在攝像視場中布設若干個明顯的反光標志點,并測量出它們在路面坐標系中的坐標值并存儲在控制攝像頭的計算機系統中,則計算機系統能夠根據地物標志點在影像中的位置,自動解算建立透視投影變換關系,以上兩個問題就可以迎刃而解。但這需要事先做大量的基礎工作。
本文限于條件,實驗基于視頻文件,而視頻文件是事先錄制的,已經失去了實時性。要實現實時性,需要直接采用攝像頭提供的視頻流提取時序影像。這在技術上不存在問題,但毫無疑問,還需要在實驗中解決新出現的問題。
[1]王翔,肖建力. 基于視頻的交通參數檢測綜述[J]. 上海理工大學學報,2016,(38): 5,479-486.
[2]徐楊,吳成東,陳東岳. 基于視頻圖像的交通事件自動檢測算法綜述[J]. 計算機應用研究,2011,28(4): 1206-1210.
[3]湯淑明,王坤峰,李元濤. 基于視頻的交通事件自動檢測技術綜述[J]. 公路交通科技,2006,23(8): 116-121.
[4]童劍軍,鄒明福. 基于監控視頻圖像的車輛測速[J]. 中國圖象圖形學報,2005,10(2),192-196.
[5]徐偉,王朔中. 基于視頻圖像Harris角點檢測的車輛測速[J]. 中國圖象圖形學報,2006,11 (11): 1650-1652.
[6]高浩軍,杜宇人. 基于視頻序列圖像的車輛測速研究[J]. 電子測量技術,2007,30(2): 42-49.
[7]王圣男,郁梅,蔣剛毅. 智能交通系統中基于視頻圖像處理的車輛檢測與跟蹤方法綜述[J]. 計算機應用研究,2005,(9): 9-14.
[8]賈永紅. 數字圖像處理(第三版)[M]. 武漢: 武漢大學出版社,2015.
[9]寧津生,陳俊勇,李德仁,等. 測繪學概論(第二版)[M]. 武漢: 武漢大學出版社,2008.
A Method of Video-Based Traffic Speed Detection
YU Zifan*
(Remote Sensing Information Engineering,Wuhan University,Hubei Wuhan,430079,China)
This paper proposes a template matching method for real-time road average speed measurement,its characteristics are: no moving target inspection and tracking complex,is not affected by the change of illumination,climate and other external conditions affect the difference of vehicle. The principle,calculation method and necessary external conditions of the method are introduced,and the effectiveness of the method is verified by traffic surveillance video.
traffic surveillance video; speed measurement; template matching
TP393
A
1672-9129(2017)06-0153-043
10.19551/j.cnki.issn1672-9129.2017.06.054
于子凡. 一種基于監控視頻的車速測量方法[J]. 數碼設計,2017,6(6): 153-155.
Cite:YU Zifan. A Method of Video-Based Traffic Speed Detection[J]. Peak Data Science,2017,6(6): 153-155.
2017-02-05;
2017-03-17。
于子凡(1963-),男,湖南瀏陽,副教授,博士研究生,研究方向:地理信息工程。
Email:yuzifan2012@whu.edu.cn
