閉環控制回路多指標性能評價
2017-12-07 02:05:44趙洪洲
化工自動化及儀表 2017年11期
趙洪洲 趙 眾 朱 磊
(北京化工大學信息科學與技術學院)
閉環控制回路多指標性能評價
趙洪洲 趙 眾 朱 磊
(北京化工大學信息科學與技術學院)
針對目前基礎回路控制器性能評價方法存在直觀性差、易讀性差和不可溯源的問題,提出一種多指標性能評價方法。采用相對性能指數評價回路的響應和設定值跟蹤情況,采用振蕩指數指標評價回路振蕩情況,采用有效投用率評價控制器的投用情況。仿真與工業應用結果均證實了所提方法的可行性和有效性。
基礎回路控制器 閉環控制回路 多指標性能評價 有效投用率
基礎回路的自動控制投用率和自動控制效果是提高產能、減少人工勞動力的根本所在[1]。目前,提高回路自動控制投用率和效果的常用方法有最小方差控制基準評價方法、應用于多變量系統的最小相位評價方法[2]及線性二次高斯控制基準評價方法[3]等。其中,最小方差控制基準評價方法已從單回路拓展到了多入多出系統、非最小相位系統及先進控制系統等。
然而,在實際工業過程中現有的方法僅能給出控制器的評價結果,導致現場操作人員理解難度大、學習成本高。為此,筆者提出了一種閉環控制回路多指標性能評價方法,根據采集到的閉環控制回路生產數據,計算控制回路的多項指標,推斷控制器性能下降的可能原因,以便進行輔助維護。
1 系統模型
閉環控制回路系統框圖如圖1所示。

圖1 閉環控制回路系統框圖
則脈沖響應模型為:
y(k)=Gd(q-1)a(k)+Gp(q-1)Gc(q-1)(r(k)-y(k))
(1)
式中r(k)-y(k)——拉氏變換運算符;
q-1——偏差。
模型辨識方法選擇子空間辨識方法[4,5],其表達式如下:

(2)
式中A、B、C、D——系統模型矩陣;
u(k)——控制器輸出,u(k)∈Rm;
v(k)——系統過程中的測量噪聲干擾,v(k)∈Rl;
w(k)——系統過程中的噪聲干擾,w(k)∈Rn;
x(k)——過程狀態量,x(k)∈Rn;
y(k)——系統輸出,y(k)∈Rl。
設k為某一時間點,f為預計的周期,則式(1)可轉換為:
yf=Γfx(k)+Hfuf+Gfwf+vf
(3)
其中,向量yf、uf、wf、vf、Γf為廣義可觀測矩陣。
子空間通常由兩步計算得到模型:

b. 得出系統模型矩陣。
系統的模型階次與f成正相關關系,如果選擇的f過大,則系統階次過高,導致計算量增加。為此可以采用奇異值分解得到系統階次的最佳值。基于正交投影原理,根據QR分解和SVD分解,得到的計算式為:
(4)
根據Frobenius范數,即可得到A、B、C、D的估計值。轉換為傳遞函數,有:
G(s)=C(sI-A)-1B+D
(5)
2 多指標性能評價
2.1相對性能指數
相對性能指數(Relative Performance Index,RPI)用以顯示控制相對于基準值的響應速度,其中基準值是根據期望穩態時間得到的。RPI值越接近1就表示系統傳遞函數的響應效果越接近預期設定值,控制性能越好,小于1則為較差,大于1則表示系統響應速度快于預期設定值。RPI的計算式為:
式中Tr(actual)——實際辨識模型的穩態時間;
Tr(desired)——基準模型的穩態時間。
閉環回路中,將控制器和過程對象閉環后,可近似作為一個二階系統進行分析。在二階系統中:

(6)
當系統無阻尼振蕩頻率ωn不變時,阻尼比ζ越大,系統超調量越小,系統穩定性越強;但同時系統響應會變慢,穩態時間會變長。根據實際操作經驗,ζ的理想取值為0.6~1.0。
系統響應時間ts的計算式為:


(7)
其中,V為相對誤差。根據式(7)可以反推出ωn,然后即可得到式(6)的數學表達式。
2.2振蕩指數
振蕩是受控變量變動中具有重復性的現象。受控變量處于振蕩狀態時,除影響自身的穩定性外,還會影響前后回路的穩定性[6]。采用自相關系數計算振蕩指數ρk,則有:
(8)
式中k——滯后數;
yt——t時刻的測量值;
自相關函數對于變量在不同時間的值的相關程度有較好的度量。振蕩指數越大,越接近1,說明振蕩越強;反之越平穩。
2.3有效投用率
投用率是生產平穩的重要表征指標,通常越高越好。但是該投用率只是DCS端控制回路狀態量的值,對于控制器是否真實有效,閥門是否起作用無從得知。因此筆者提出有效投用率指標,用以評價控制器的實際效果。有效投用率是以控制器真正起作用時間的占比進行計算的。將控制器無效的時間段和操作量MV值飽和狀態時間段去除,從而得出控制器的有效時間。其計算公式如下:

(9)
投用率和有效投用率的數據曲線如圖2所示,可以看出,雖然DCS端控制回路全程顯示投用,但是控制器控制效果有限,其有效投用率僅為53.58%。

圖2 投用率和有效投用率的數據曲線
3 應用情況
基于閉環控制回路多指標性能評價方法,筆者開發了相應的控制器性能評價(Controller Performance Analysis,CPA)軟件。在某化工企業的現場應用系統結構框圖如圖3所示。CPA軟件通過OPC工業標準采集生產過程中的數據,對4個分廠的6 000多個基礎控制回路進行實時監控。CPA軟件對所監控的基礎控制回路給出優、良、中、差4個等級,并提供控制性能的改進建議。

圖3 某企業現場應用系統結構框圖
圖4為評價結果為中的回路詳細報告。其中,期望穩態時間為600s,未達到預設要求。實測值PV跟隨設定值SV良好,且PV與控制器輸出MV相匹配,說明MV的作用效果明顯,因此有效投用率較高。但是回路曲線整體存在明顯的振蕩,所以綜合后的評價結果為中。

圖4 評價結果為中的回路詳細報告
圖5為評價結果為差的回路詳細報告。其中,期望穩態時間為600s,未達到預設要求。PV跟隨SV良好,且PV與MV相匹配。然而MV存在極值狀態,此時控制器為放任狀態,即認為無效,同時曲線又存在振蕩,所以綜合后的評價結果為差。
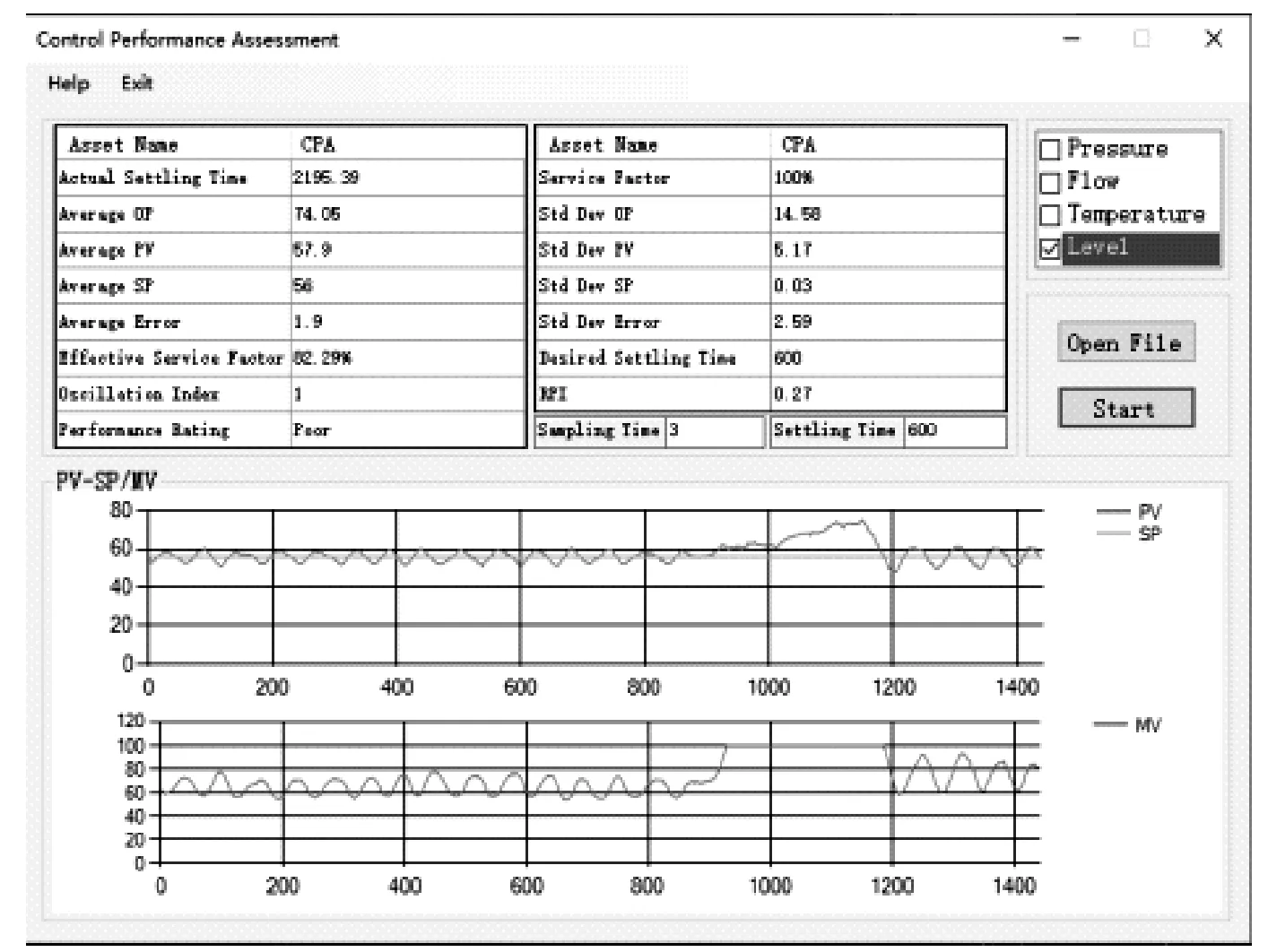
圖5 評價結果為差的回路詳細報告
4 結束語
針對目前控制器性能評價方法存在直觀性差、易讀性差和不可溯源的問題,提出了一種多指標控制器性能評價方法。僅通過生產過程中的實際數據,即可評價回路的控制性能,并可根據不同指標的不同評價結果,有針對性地查找問題出處。各項指標與生產過程緊密結合,提高了控制器性能評價的可用性。仿真結果和工業應用結果均證實了筆者所提方法的可行性和有效性。
[1] Mcmillan G K.Tuning and Control Loop Performance[M].New York:Momentum Press,2014.
[2] Thornhill N F,Huang B,Zhang H.Detection of Multiple Oscillations in Control Loops[J].Journal of Process Control, 2003,13(1):91~100.
[3] Huang B.Performance Assessment of Processes with Abrupt Changes of Disturbances[J].Canadian Journal of Chemical Engineering,2010,77(5):1044~1054.
[4] 羅小鎖.基于子空間辨識的預測控制方法研究[D].重慶:重慶大學,2011.
[5] 羅小鎖,陳學昌,曹保山.有色噪聲條件下的子空間辨識改進方法及應用[J].計算機工程與應用,2015,51(1):234~237.
[6] Liao K,Xu Y,He Z,et al.Second-order Sliding Mode Based P-Q Coordinated Modulation of DFIGs against Interarea Oscillations[J].IEEE Transactions on Power Systems,2017,PP(99):1.
EvaluationofControlLoopPerformancewithMultiple
IndexBasedonSubspaceModelIdentification
ZHAO Hong-zhou, ZHAO Zhong, ZHU Lei
(CollegeofInformationScienceandTechnology,BeijingUniversityofChemicalTechnology)
Considering poor intuition and readability and traceability of existing basic loop controller’s performance evaluation method, a multi-index-based comprehensive evaluation method was proposed. Having relative performance index adopted to evaluate both loop response and the set point’s tracking ability was implemented, including having oscillatory index employed to evaluate closed loop’s oscillation feature and the effective service index taken to evaluate the controller’s application effect. The simulation and industrial application results verify both feasibility and effectiveness of this method proposed.
basic loop controller, closed control loop, multi-index performance evaluation, application effect
北京市自然科學基金項目(4172044)。
趙洪洲(1988-),碩士研究生,從事生產過程系統模型辨識與性能評測的研究。
聯系人趙眾(1970-),教授,從事先進控制、過程監測、工業控制系統集成的研究,zhaozhong@mail.buct.edu.cn。
TH865
A
1000-3932(2017)11-1019-04
2017-05-23,
2017-08-14)
2018慕尼黑上海電子生產設備展
展會時間2018年3月14~16日展會地點上海新國際博覽中心
2018慕尼黑上海電子生產設備展將于2018年3月14~16日在上海新國際博覽中心舉辦。本屆展會匯聚國內外領先設備廠商,展品范圍涵蓋整個電子行業產業鏈,包括SMT表面貼裝技術、線束加工和連接器制造、電子制造自動化、運動控制、點膠注膠、焊接、電子和化工材料、EMS電子制造服務、測試測量、PCB制造、電磁兼容、元器件制造(繞線機、沖壓、灌裝、涂敷、分選、打標等)和組裝工具等。聯合同期舉辦的慕尼黑上海電子展(Electronica China),展會規模將突破80 000平方米,預計參展商數量將超過1 400家,海內外觀眾數量將達到70 000名。琳瑯滿目的創新設備和制造科技,工業4.0和智慧工廠理念與實踐相結合,Productronica China “智”在創新,帶您盡覽未來電子科技!
主辦方慕尼黑展覽(上海)有限公司
地址上海市浦東新區源深路1088號平安財富大廈11樓
郵編200122
電話+86-21-2020 5516傳真+86-21-2020 5688/5699
郵箱jenny.liu@mm-sh.com
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
石油瀝青(2021年4期)2021-10-14 08:50:44
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
中國教育技術裝備(2015年19期)2015-03-01 02:43:07
俄羅斯問題研究(2012年1期)2012-03-25 09:54:51