基于GNSS速度信息輔助的飛行器姿態(tài)保持技術研究
2017-12-06 05:22:15申亮亮邵會兵
導航定位與授時 2017年6期
王 彬,申亮亮,邵會兵
( 北京控制與電子技術研究所,北京 100038)
基于GNSS速度信息輔助的飛行器姿態(tài)保持技術研究
王 彬,申亮亮,邵會兵
( 北京控制與電子技術研究所,北京 100038)
為了提高飛行器精確打擊和偵察探測能力,針對飛行器組合導航系統(tǒng)高精度、長航時和高可靠的姿態(tài)保持問題,研究了一種基于 GNSS 速度信息輔助的飛行器姿態(tài)保持技術。通過采用開環(huán)修正和閉環(huán)修正結合的工作方式,克服了慣性導航誤差隨時間不斷積累引起的濾波精度下降問題;通過對GNSS信息進行χ2檢測,避免飛行器作大機動飛行或有外部干擾時引起的 GNSS 信息異常,確保GNSS信息的有效性;通過對GNSS 速度信息的時間延遲進行擴展建模,抑制 GNSS 數(shù)據(jù)延遲對姿態(tài)保持算法的影響。仿真和實際數(shù)據(jù)處理結果表明:該姿態(tài)保持技術充分利用慣性導航系統(tǒng)和GNSS的優(yōu)點,技術方案合理,能夠滿足飛行器高精度、長航時和高可靠姿態(tài)保持的需求,具有較好的工程應用價值。
GNSS;飛行器;姿態(tài)保持
0 引言
為了提高飛行器精確打擊和偵察探測能力,飛行器的導航系統(tǒng)要能夠為自身制導與控制系統(tǒng)提供高精度的姿態(tài)基準。
高空、長航時飛行器由于飛行距離遠、航行時間長,對導航系統(tǒng)的自主性和精確性提出了很高的要求。慣性導航系統(tǒng)(INS)以其短時精度高、自主性強、信息連續(xù)性好等優(yōu)點而被廣泛采用,但它也存在著自身不可克服的缺點,即誤差隨時間不斷積累[1-3]。為了克服其缺點,目前普遍采用基于慣性導航的組合導航系統(tǒng)。衛(wèi)星導航系統(tǒng)(GNSS)以其全天候工作、精度高、實時提供三維速度、位置信息等優(yōu)勢,成為高精度導航定位的重要手段[6-7]。美國的GPS是目前世界上應用最廣、精度最高的衛(wèi)星導航系統(tǒng),俄羅斯也成功研制了自己的 GLONASS衛(wèi)星導航系統(tǒng)。我國已成功建成北斗導航系統(tǒng),并正在建設具備全球導航能力的北斗二代衛(wèi)星導航系統(tǒng)。鑒于衛(wèi)星導航系統(tǒng)能夠提供穩(wěn)定的三維速度、位置信息,利用衛(wèi)星導航系統(tǒng)與慣導組成的組合導航系統(tǒng)得到廣泛應用,并已經(jīng)成為目前長航時導航領域主要的導航系統(tǒng)。GNSS系統(tǒng)可以對外輸出位置和速度信息,考慮到機載GNSS的速度測量精度高、飛行器空中環(huán)境下的激勵充分、基于速度信息輔助INS/GNSS組合導航算法收斂速度較快等因素,設計了一種基于GNSS速度信息輔助姿態(tài)保持技術,利用飛行器上INS和GNSS的速度誤差作為觀測量,估計飛行器INS失準角,進而用以修正INS姿態(tài)信息,實現(xiàn)長航時姿態(tài)保持。
1 方案概述
典型長航時飛行器的飛行過程包括起飛前準備、爬升飛行、飛機空中盤旋飛行、返航等階段。在飛行過程中,飛行器的姿態(tài)保持系統(tǒng)采用INS/GNSS組合導航技術,進行INS系統(tǒng)的姿態(tài)保持。具體方案如圖1所示。

圖1 姿態(tài)保持系統(tǒng)具體工作過程Fig.1 The measurement principle of attitude hold system
根據(jù)長航時飛行過程各個階段的特點,在起飛開始階段姿態(tài)保持系統(tǒng)僅輸出INS系統(tǒng)的導航信息;待GNSS數(shù)據(jù)穩(wěn)定后,GNSS信息可用時,姿態(tài)保持系統(tǒng)再輸出濾波后的導航結果;考慮到系統(tǒng)長時間工作時的誤差積累引起濾波精度下降,采用開環(huán)修正和閉環(huán)修正結合的方式,在姿態(tài)保持計算過程中主要對INS信息進行開環(huán)修正,但需要每隔一段時間對INS系統(tǒng)的計算結果進行一次閉環(huán)校正。卡爾曼濾波的觀測量為INS系統(tǒng)輸出速度與GNSS速度的差值,觀測噪聲和系統(tǒng)噪聲的設定以實際設備的精度指標為參考。
2 姿態(tài)保持系統(tǒng)數(shù)學模型建立
2.1 GNSS信息傳輸延遲的補償
將INS、GNSS的速度差值作為觀測信息時,在載體靜止或勻速運動的情況下,GNSS解算的位置和速度信息基本不變,時間延遲的影響可以忽略;但是在載體轉彎、加速等機動情況下,位置和速度信息是時變的,INS、GNSS的速度信息會由于時間延遲而產生較大的誤差,影響誤差的估計和補償精度。
當INS與GNSS之間的時間延遲未知時,可以將INS、GNSS之間的時間延遲作為一個隨機常值處理,即假設GNSS數(shù)據(jù)的時間延遲為Δt,則其在組合導航系統(tǒng)中的狀態(tài)模型為[3]

(1)
據(jù)此可將其擴充到系統(tǒng)的狀態(tài)量中,利用卡爾曼濾波估計出時間延遲并補償。
2.2 GNSS信息有效性的判斷
GNSS系統(tǒng)在導航定位過程中,當載體作大機動飛行或有外部干擾時,GNSS信息有可能中斷,或可能因動態(tài)誤差過大而引起單點突跳。因此在組合導航過程中必須對GNSS信息的有效性進行判斷。通過設定合理的門限,對PDOP值、解算衛(wèi)星顆數(shù)以及每一時刻GNSS位置和速度信息的變化率進行比較,即可實現(xiàn)對GNSS信息有效性的初步判斷。
在此基礎上,利用χ2檢測法對卡爾曼濾波觀測量殘差進行故障檢測來進一步判斷GNSS信息的有效性[9]。先根據(jù)極大似然比檢驗原理,構造信息(卡爾曼濾波觀測量殘差)異常檢測函數(shù);再利用預先設定的門限值和異常信息判別準則來判定GNSS信息是否存在異常。具體的實現(xiàn)過程如下。
組合導航中,系統(tǒng)的濾波殘差為
rk=Zk-HkXk,k-1
(2)
其中,Zk為系統(tǒng)的觀測量,Hk為觀測矩陣,Xk,k-1為系統(tǒng)的一步狀態(tài)預測值。
通過對濾波殘差的均值進行檢驗就可以確定GPS速度信息是否發(fā)生異常。根據(jù)極大似然比檢驗原理,構造信息異常檢測函數(shù):
(3)
其中,Rk為觀測噪聲矩陣,Pk,k-1為濾波噪聲方差矩陣。

(4)
當某一時刻GNSS速度信息出現(xiàn)異常時,只進行狀態(tài)更新不進行量測更新。
2.3 INS/GNSS組合系統(tǒng)狀態(tài)模型


(5)
其中,狀態(tài)轉移矩陣F(t)可以根據(jù)INS系統(tǒng)位置、速度和姿態(tài)誤差模型建立,Δt可以根據(jù)式(1)建立。
系統(tǒng)噪聲矢量為

(6)

2.4 組合系統(tǒng)的量測模型
基于GNSS速度信息匹配的組合導航系統(tǒng)的量測方程為
Zk=HkX+V
(7)
其中,V為觀測噪聲矩陣;Zk=[ΔvxΔvyΔvz]T,Δvx、Δvy、Δvz分別為INS與GNSS速度差值在當?shù)氐乩硐迪碌耐队埃幌到y(tǒng)的觀測矩陣為
(8)

3 仿真實驗與結果分析
3.1 數(shù)學仿真結果分析
(1)仿真條件
結合飛行試驗的基本過程,飛行軌跡的設計主要包括水平加速、爬升、空中盤旋、勻速飛行等過程,飛行時間3h,飛行軌跡如圖2所示。設初始北向、東向失準角誤差為1′,天向失準角為30′;陀螺常值漂移0.09(°)/h,隨機漂移為0.05(°)/h;加速度計零偏2×10-4g0,隨機噪聲為1×10-4g0;GNSS速度測量噪聲為0.1m/s。
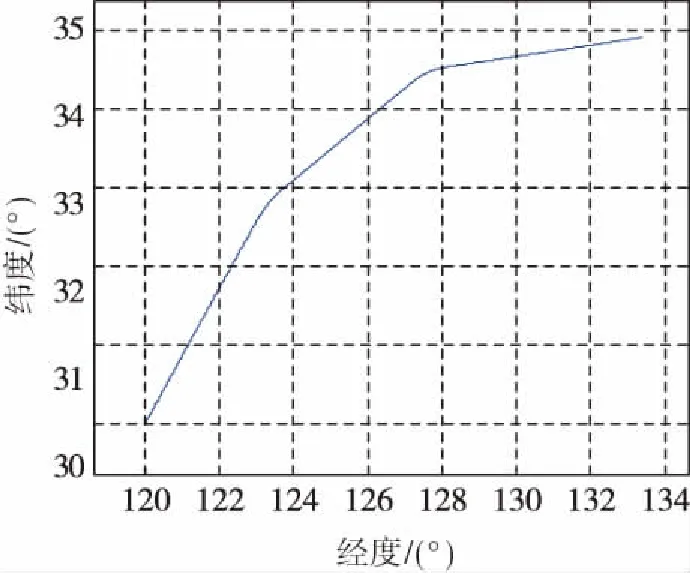
圖2 (a)飛行軌跡在水平面的投影Fig.2 (a)The horizontal projection of flight path

圖2 (b)飛行高度曲線Fig.2 (b)The altitude of flight path
(2)信息傳輸延遲補償仿真
為了凸現(xiàn)時間延遲誤差的補償效果(勻速飛行條件下時間延遲的影響較小),設定載體在空中進行200s的加速和減速運動,加速度最大為0.5m/s2;在組合導航過程中,將GNSS數(shù)據(jù)的時間延遲分為常值和隨機量,分別設定為0.5s和0.1s。
實際設置的時間延遲與組合導航估計出的時間延遲曲線如圖3所示。可以看出,該姿態(tài)保持技術能夠較為準確地估計出GPS數(shù)據(jù)的時間延遲。時間延遲補償前后的姿態(tài)角誤差對比如圖4所示。

圖3 (a)GNSS數(shù)據(jù)時間延遲圖Fig.3 (a)Time-delay of GNSS data

圖3 (b)時間延遲的估計結果Fig.3 (b)The estimate result of GNSS time-delay

圖4 時間延遲補償前后的方位角誤差Fig.4 Azimuth errors before and after time-delay comprehension
從仿真結果可以看出,在動態(tài)條件下,對時間延遲不進行狀態(tài)擴展時,載體的姿態(tài)會存在較大的波動,甚至引起姿態(tài)誤差無法滿足指標要求;對時間延遲進行擴展建模,可以有效估計和補償時間延遲的影響,使系統(tǒng)的姿態(tài)輸出更加平穩(wěn),滿足指標要求。
(3)χ2檢測法仿真
在t=300s、t=600s時,在GPS速度信息中加入幅值為2m/s的單點沖擊異常值;在1100~1300s加入幅值為2m/s的正弦形式異常值。采用基于殘差的χ2檢驗法進行檢驗,異常檢驗曲線如圖5所示。

圖5 信息異常檢驗結果Fig.5 The test result of information abnormity
異常誤差補償前后的姿態(tài)誤差如圖6所示。

圖6 (a)方位角誤差曲線Fig.6 (a)Azimuth errors before and after information abnormity comprehension

圖6 (b)俯仰角誤差曲線Fig.6 (b)Pitching errors before and after information abnormity comprehension
從仿真結果可以看出,GNSS信息存在異常值時,通過χ2檢驗法可以有效抑制異常數(shù)據(jù)對組合導航的影響,保證系統(tǒng)的姿態(tài)測量精度。
(4)姿態(tài)保持技術長航時仿真結果
綜合考慮時間延遲和信息異常對組合導航的影響。將Δt擴充到系統(tǒng)的狀態(tài)并利用χ2檢驗法抑制信息異常的影響后,3h內的姿態(tài)角輸出誤差如圖7所示。
從仿真結果可以看出,設計的姿態(tài)保持技術通過采用開環(huán)修正和閉環(huán)修正結合的方式有效減小了慣性器件誤差引起的累積姿態(tài)角誤差,實現(xiàn)了長航時姿態(tài)保持,并有效抑制GPS數(shù)據(jù)傳輸延遲、GPS信息異常對組合導航的影響。濾波穩(wěn)定后,俯仰角、滾轉角誤差≤1′、方位角度誤差≤6′,能夠滿足技術指標要求,數(shù)學仿真結果證明了技術的可行性。
3.2 實際飛行數(shù)據(jù)處理結果分析
采用實際機載飛行數(shù)據(jù)驗證長航時姿態(tài)保持技術性能,其基本技術指標為:GNSS速度觀測噪聲為0.1m/s;系統(tǒng)噪聲的設定以50型激光慣組的精度指標為參考。GNSS數(shù)據(jù)有效起始時間:70s;GNSS對時起始時間:101.09s。
飛行器的運行軌跡如圖8所示。

圖7 (a)3h方位角誤差曲線Fig.7 (a)Azimuth error curve of 3h

圖7 (b)3h俯仰角誤差曲線Fig.7 (b)Pitching error curve of 3h

圖8 實際飛行軌跡在水平面的投影Fig.8 The horizontal projection of actual flight path
姿態(tài)保持算法輸出的3個姿態(tài)角如圖9所示。

圖9 (a)姿態(tài)保持算法輸出的方位角Fig.9 (a)The Azimuth angle of attitude hold algorithm

圖9 (b)姿態(tài)保持算法輸出的俯仰角Fig.9 (b)The pitching angle of attitude hold algorithm

圖9 (c)姿態(tài)保持算法輸出的滾轉角Fig.9 (c)The roll angle of attitude hold algorithm

圖10 信息異常檢驗結果Fig.10 The test result of information abnormity
GPS信息異常檢測和時間延遲的處理結果如10和圖11所示。

圖11 時間延遲的估計結果Fig.11 The estimate result of GNSS time-delay
3個失準角的估計結果如圖12所示。
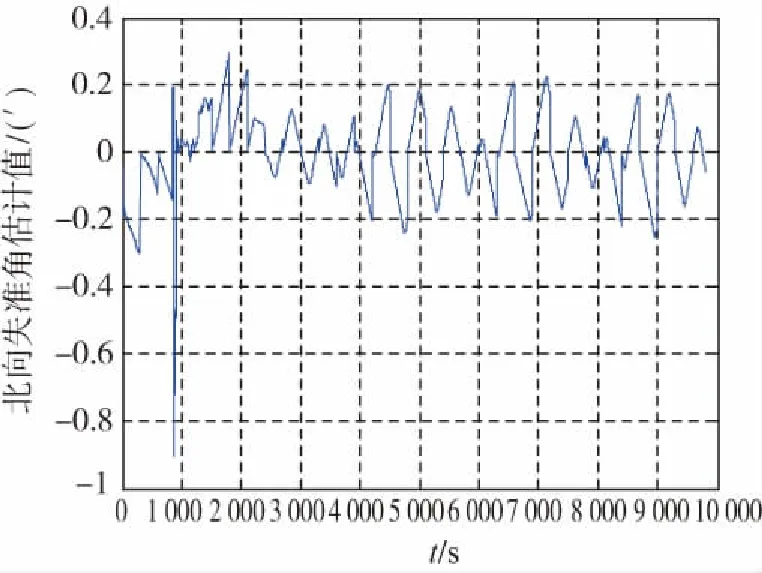
圖12 (a)北向失準角估計值圖Fig.12 (a)The estimate result of north misalignment angle

圖12 (b)東向失準角估計值Fig.12 (b)The estimate result of east misalignment angle

圖12 (c)天向失準角估計值Fig.12 (c)The estimate result of azimuth misalignment angle
實際飛行試驗數(shù)據(jù)處理結果表明:該組合姿態(tài)保持算法能在飛機爬升的過程中完成姿態(tài)失準角的估計,開環(huán)修正和閉環(huán)修正結合的工作方式可以有效抑制姿態(tài)誤差的發(fā)散,空中飛行3h的水平姿態(tài)誤差≤0.5′、方位角誤差≤3′;且該技術能夠有效抑制高空環(huán)境下GNSS數(shù)據(jù)異常和時間延遲對姿態(tài)計算的影響,能夠實現(xiàn)長時間的姿態(tài)保持且能夠滿足高精度姿態(tài)基準的指標要求。結合數(shù)學仿真的處理結果,驗證了姿態(tài)保持技術的可行性,可為飛行試驗的順利進行奠定基礎。
4 結論
本文主要闡述了一種基于GNSS速度信息輔助姿態(tài)保持技術的設計過程。根據(jù)數(shù)學仿真和實際飛行試驗的數(shù)據(jù)處理結果,主要得出了以下結論:
1)在姿態(tài)保持技術系統(tǒng)建模時,對GNSS速度信息的時間延遲進行擴展建模,可以有效估計和補償時間延遲的影響,使系統(tǒng)的姿態(tài)輸出更加平穩(wěn),滿足指標要求;
2)飛行器在飛行過程中,當GNSS信息存在異常值時,通過χ2檢驗法對GNSS信息的有效性進行判斷,可以有效抑制異常數(shù)據(jù)對組合導航的影響,保證系統(tǒng)的姿態(tài)保持精度;
3)該姿態(tài)保持技術能在飛機爬升的過程中完成姿態(tài)失準角的估計,開環(huán)修正和閉環(huán)修正相結合的工作方式能夠保證系統(tǒng)輸出高精度姿態(tài)基準;該技術還能夠有效抑制高空環(huán)境下GNSS數(shù)據(jù)異常和速度信息的時間延遲對姿態(tài)計算的影響,具有較強的抗干擾性。
綜上,基于GNSS速度信息輔助姿態(tài)保持技術繼承了現(xiàn)有的成熟技術,技術方案合理,能夠滿足飛行器長航時姿態(tài)保持的精度需求,可為后續(xù)飛行試驗提供參考。
[1] Wang X, Wang B, Li H. An autonomous navigation scheme based on geomagnetic and starlight for small satellites[J]. Acta Astronaut, 2012,81(1):40-50.
[2] 王新龍,馬閃. 高空長航時無人機高精度自主定位方法[J]. 航空學報,2008,29(S):39-45.
[3] 吳海仙,俞文伯,房建成. 高空長航時無人機SINS/CNS組合導航系統(tǒng)仿真研究[J]. 航空學報,2006,27(2):299-304.
[4] 寧曉琳,蔡洪煒,吳偉仁,等. 月球車的慣性/天文組合導航新方法[J]. 系統(tǒng)工程與電子技術,2011,33(8):1837-1843.
[5] 岳亞洲,張曉冬,田宇,等. 一種新的慣性/天文組合導航方法研究[J]. 光學與光電技術,2008,6(4):89-92.
[6] 于永軍. 高空長航無人機多信息融合自主導航關鍵技術研究[D]. 南京:南京航空航天大學,2011.
[7] 徐帆. 慣性/天文/衛(wèi)星組合導航方法研究[D]. 北京:北京航空航天大學,2008.
[8] 扈光鋒,王艷東,范躍祖. 傳遞對準中測量延遲的補償方法[J]. 中國慣性技術學報,2005,13(1):10-14.
[9] 張華強,趙剡,連遠峰. 基于自適應概率神經(jīng)網(wǎng)絡的SINS/GPS組合導航系統(tǒng)故障診斷方法[J]. 中國慣性技術學報,2012,20(6):749-753.
[10] 王彬. 飛行器高精度自主組合導航系統(tǒng)技術研究[D]. 北京:北京航空航天大學,2012.
ResearchonAircraftAttitudeHoldSchemewithGNSSVelocityInformation
WANG Bin, SHEN Liang-liang, SHAO Hui-bing
(Beijing Institute of Control amp; Electronic Technology, Beijing 100038, China)
In order to improve the precision attack ability and investigation detection ability of aircraft, toward the attitude hold problem of high precision, long endurance and high reliable of aircraft navigation system, an aircraft attitude hold scheme with GNSS velocity information is proposed. The combination of open-loop correction and closed-loop correction is adopted to suppress filter precision decline due to inertial navigation error which accumulates with time. Theχ2test method is used to avoid GNSS information abnormity during high maneuver fight and external disturbances and to ensure the validity of GNSS infomation. The extensible modeling on time-delay of GNSS velocity information is used to restrain the influence of time-delay of GNSS velocity information on attitude hold algorithm. The simulation and data processing results demonstrate that, based on the advantages of GNSS and INS(inertial navigation system), the attitude hold scheme meets the requirement of high precision, long endurance and high reliable attitude hold of aircraft, which has a favorable engineering value.
GNSS; Aircraft; Attitude hold*
10.19306/j.cnki.2095-8110.2017.06.008
V249.32
A
2095-8110(2017)06-0049-07
2017-05-02;
2017-06-26
王彬(1987-),男,碩士,工程師,主要從事慣性導航技術研究。E-mail:wangbinbuaa@126.com
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32