基于位置修正的軌跡測量方法研究
2017-12-06 05:27:06崔蒞杭陳貴金王勇剛
導航定位與授時 2017年6期
崔蒞杭,陳貴金,王勇剛
(湖北三江航天紅峰控制有限公司,湖北 孝感 432000)
基于位置修正的軌跡測量方法研究
崔蒞杭,陳貴金,王勇剛
(湖北三江航天紅峰控制有限公司,湖北 孝感 432000)
傳統精密軌跡測量方法大都采用GPS、全站儀等設備,存在設備不易架設、數據不連續、對環境要求較高等缺點。針對該問題提出一種基于航位推算系統的軌跡測量方法。該方法在航位推算基礎上引入了位置修正技術,通過起始點與終點坐標即可計算出系統俯仰角誤差、方位角誤差及里程儀標度因數誤差。系統完成航位推算計算后,用求解出的系統誤差對航位推算軌跡進行修正,即可獲得高精度的軌跡數據。最后通過試驗驗證該方法可行,系統行進153m誤差小于0.12m。
軌跡測量;慣性導航;航位推算;位置修正
0 引言
精密軌跡測量對確保大型工程(如橋梁、隧道等)的順利實施、工程的優質、日常運營狀況的安全檢測等有著重大意義。目前國內實施重大工程項目的測量儀器普遍使用GPS接收機、全站儀、精密水準儀等,在隧道內還部分使用陀螺定向儀、激光指向儀等檢測設備[1-4]。這種測量方法存在著眾多局限性:基準點不易確定,測量設備不易架設等難點;只能進行多點測量,不能提供連續的測試數據;環境要求較高,測量過程中GPS無信號或視線被遮擋等狀況會影響測量精度。針對傳統方法的不足,文獻[5-6]提出了采用光纖陀螺進行軌跡測量的方法,但該方法只能進行二維數據測量,使用場合受到限制。文獻[7-8]提出利用慣性導航系統進行軌跡測量的方法,雖然慣性導航系統能夠進行三維測量,但是其誤差隨時間累積,單純的慣性導航系統無法滿足測量的精度需求。
里程儀是用來測量載體行駛速度和距離的儀器,可以利用里程儀和慣性導航系統組成航位推算系統對慣性導航系統的誤差進行抑制。本文研究了一種基于航位推算系統的軌跡測量方法。首先,對航位推算誤差進行了分析,之后針對航位推算誤差引入了位置修正技術,最后通過推行實驗對該方法進行了驗證。
1 航位推算誤差分析

航位推算是陸用系統常用的導航定位方法,陀螺進行姿態、方位解算,里程儀計算位移增量,其誤差模型已經比較成熟[9],這里直接引用:
式中:






KD為里程儀標度因數;
其中,RM與RN分別為子午圈曲率半徑與卯酉圈曲率半徑。
在實際測量操作中,系統由人工推行因此車速不會高于2m/s;其次,推行路程較短,軌跡誤差小于10m。因此忽略高階小量,式(1)可簡化為
(2)
通過式(2)可以看出,對航位推算系統位置誤差影響最大的因素為系統姿態誤差角φD與里程儀標度因數誤差δKD。
如果能夠對φD和δKD進行修正,將可以提高航位推算系統的精度。
2 位置修正
位置修正技術基于航位推算的相似性原理[10],利用載體起點、終點坐標以及航位推算解算出的坐標可以計算出姿態誤差角φD以及里程儀標度因數誤差δKD。由于系統運行較短,因此認為在運行過程中各誤差量不變。
φD包括兩種誤差:對準誤差ΦD與m系相對于b系的安裝誤差αD。其中橫滾安裝偏差角αDY對定位誤差沒有影響[6],而對準水平姿態誤差比較小(小于0.02°),因此可以不對橫滾引起的位置誤差進行修正。
2.1 方位誤差角估計

(3)
方程左側為兩邊與夾角之積,右側為向量叉乘第三分量。方位誤差角由式(3)可以求出
(4)

圖1 方位誤差估計原理圖Fig.1 The scheme of azimuth estimation
2.2 里程儀標度因數估計
根據相似性原理,不論載體如何運行,最終計算位移與實際位移之比均為常值1+δKD,所以有

(5)
2.3 俯仰誤差角估計
由式(2)分析可知,高度位置誤差為航位推算計算的行駛路程在高程方向投影產生,而產生投影的原因為存在俯仰誤差角。因此有公式
(6)

則俯仰誤差角為

(7)
航位推算計算路程可由b系下的里程儀輸出累計求得。
3 軌跡測量算法
通過A、B兩點坐標采用式(4)、式(5)、式(7)分別計算出角度誤差φDZ、φDX及里程儀標度因數誤差δKD,利用3個估計誤差對航位推算軌跡進行修正。
在實際工程中,軌跡測量一般使用全站儀坐標系進行數據處理。該坐標系定義如下:
1)坐標原點為起點;
2)從起點向終點在水平面內的投影引直線,該直線方向定義為X軸,指向終點方向為正向;
3)垂直于水平面為Z軸,朝天為正;
4)Y軸與其他兩軸成右手定則。
采用全站儀坐標系后,原點坐標P0=[0 0 0],其后坐標均為相對于P0點的位移,因此修正公式如下
(8)
式中:


為修正矩陣。
4 試驗驗證
4.1 試驗準備
為驗證文中軌跡測量方法,采用實際系統進行相關試驗。慣性導航系統安裝于試驗小車上,車輪上裝有里程儀,車體上裝有指針用于進行路標點對點,驗證用系統相關參數如下:
1) 陀螺零漂≤0.15(°)/h;
2) 加計零偏≤0.2mg;
3) 里程儀標度因數為1.7×10-4m/p。
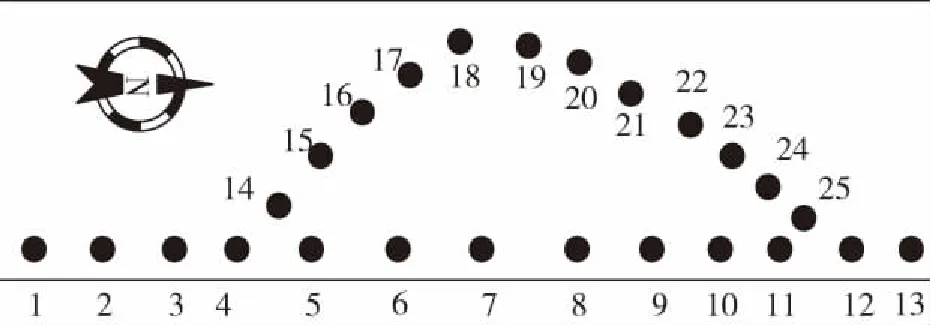
圖2 路線圖Fig.2 Route map
試驗場地選擇在車輛較少的公路上,試驗前規劃好行車路線。在行車路線上每隔十幾米設置路標點,用于考察系統精度,如圖2所示,其中1點與13點直線距離為153.07m。所有路標點采用全站儀測量水平位置及高程,全站儀精度優于0.01m。試驗采用人工推行方式,行進平均速度約為1m/s,推行過程中指針會經過所標記的路標點,指針經過路標點時通過軟件進行打標,方便事后進行精度對比。
試驗選擇兩條路線,路線規劃如表1所示,每條路線推行4次。

表1 試驗路線規劃
4.2 試驗結果
兩條線路試驗數據見表2~表5。
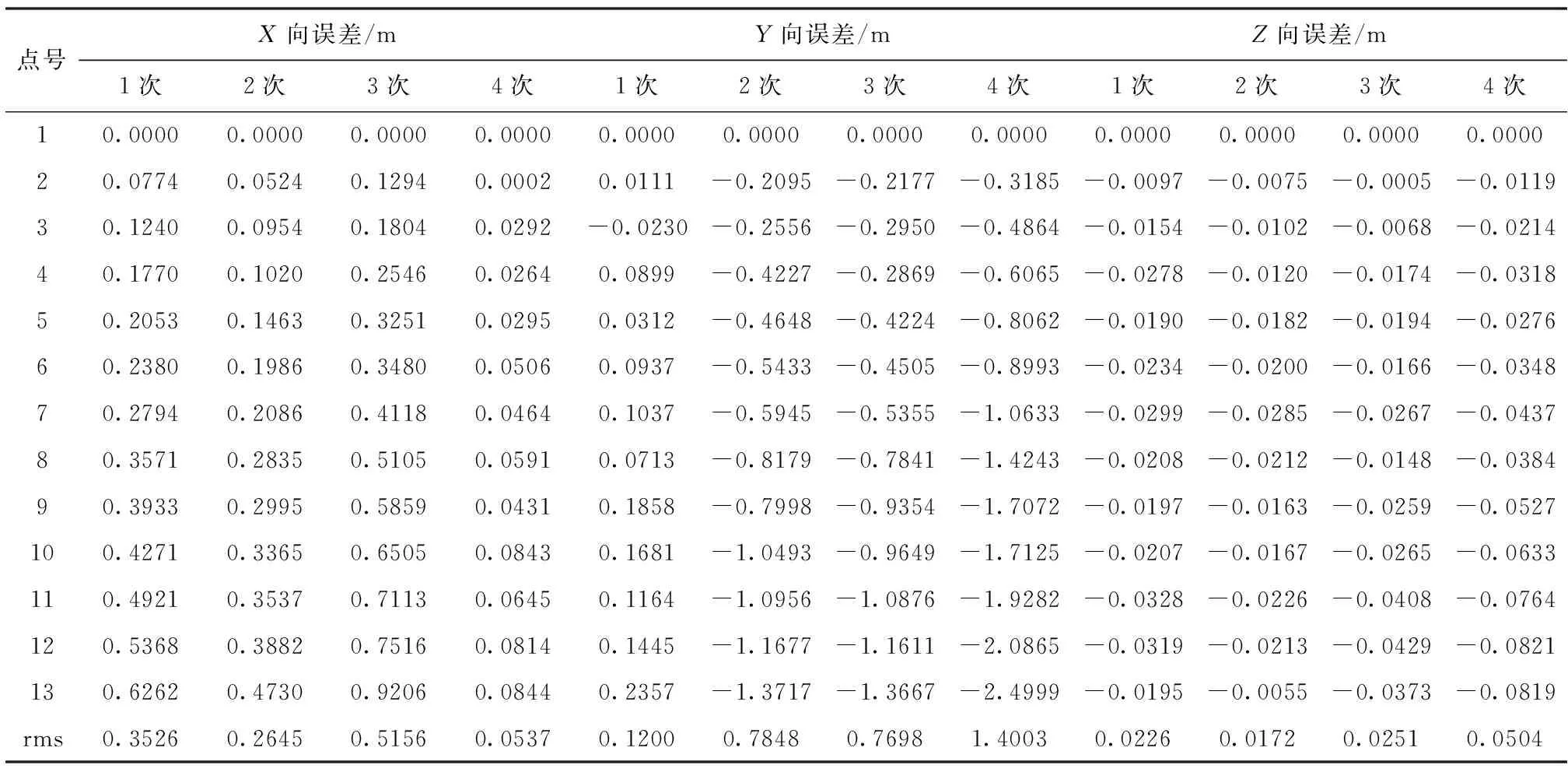
表2 第一條路線航位推算數據
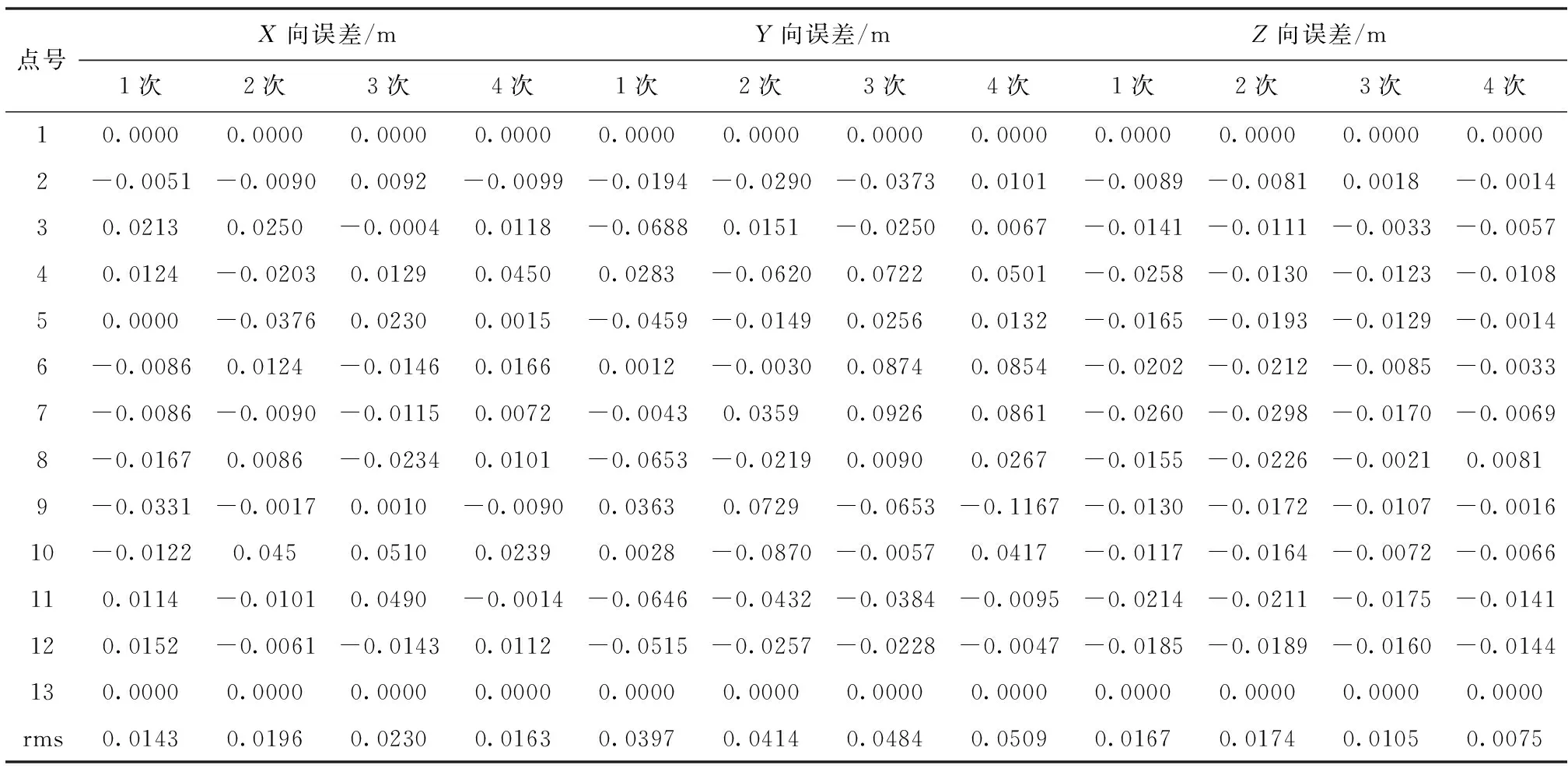
表3 第一條路線位置修正后數據
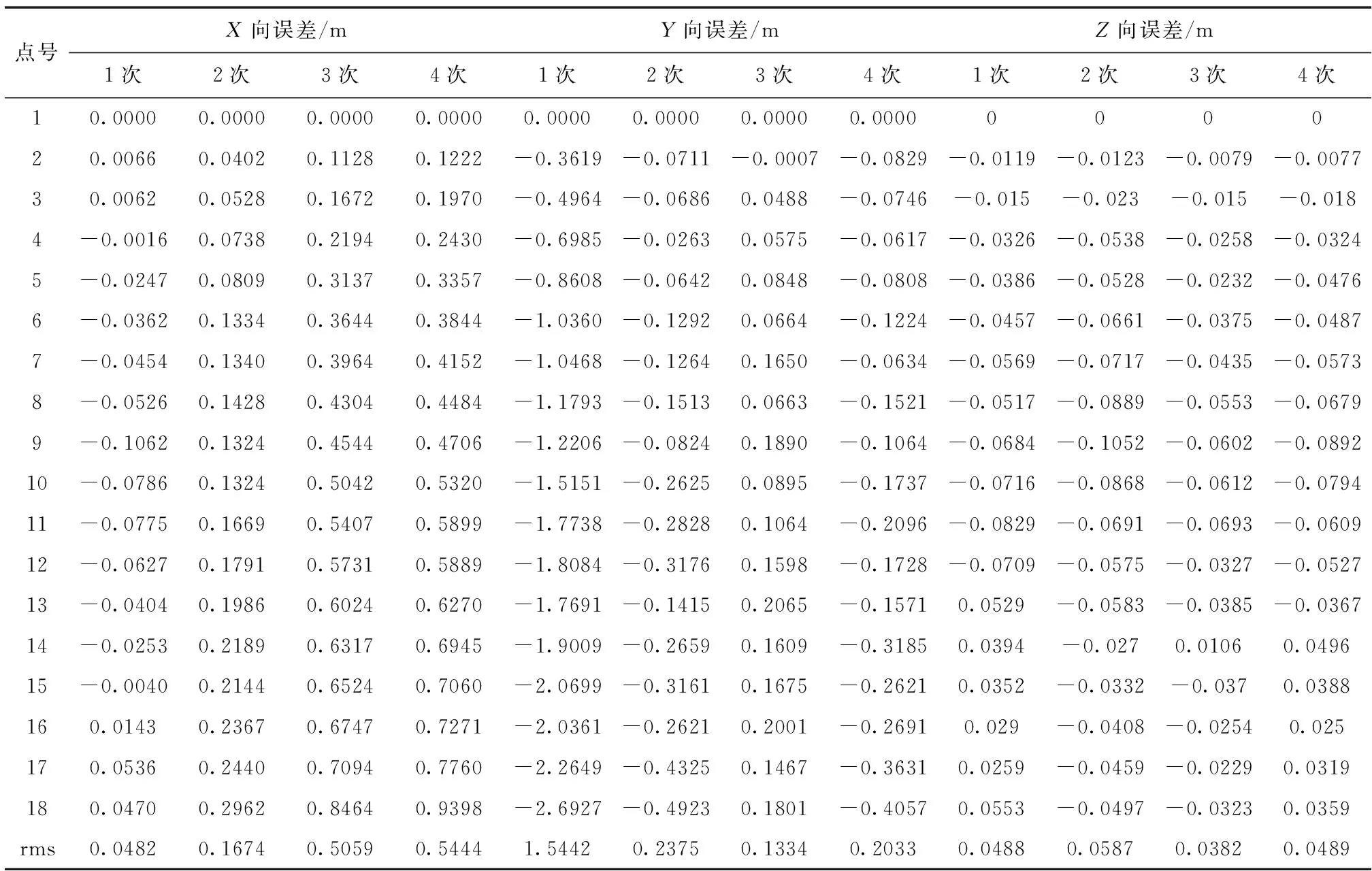
表4 第二條路線航位推算數據
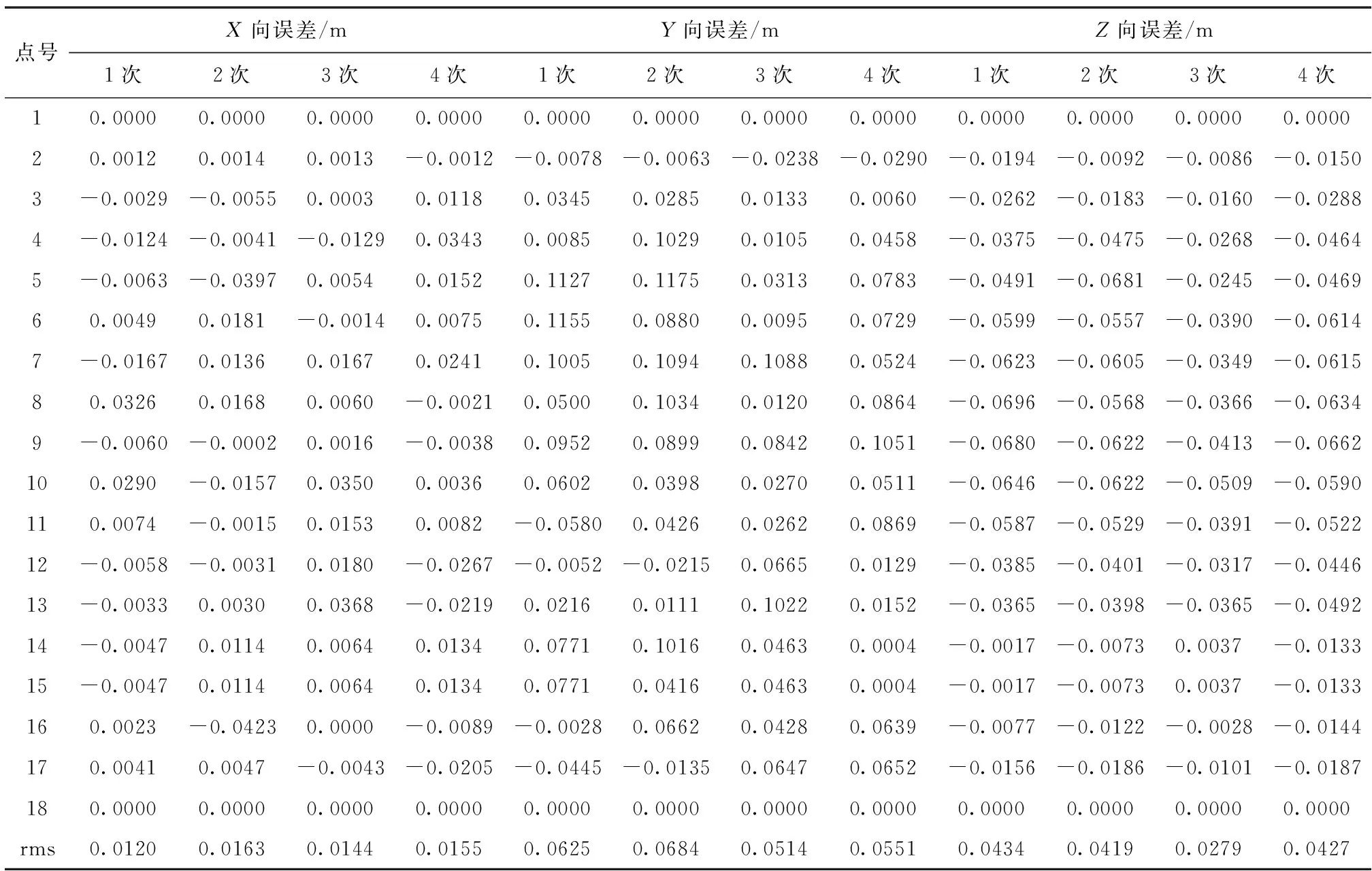
表5 第二條路線位置修正后數據
通過試驗數據可以看出,兩次試驗單獨采用航位推算時X向最大誤差為0.94m,Y向最大誤差為2.69m,Z向最大誤差為0.1m。采用本文方法修正后,X向最大誤差為0.051m,Y向最大誤差為0.1175m,Z向最大誤差為0.0696m。
圖3~圖4所示為第一條路線第一組試驗軌跡圖。從圖3中可以看出,直接采用航位推算進行測量時,由于存在方位誤差角,水平最大誤差,X向為0.63m,Y向為0.24m。而圖4表明高程上由于俯仰誤差角的影響最大誤差為0.0328m。采用本文方法修正后,X向最大誤差為0.03m,Y向最大誤差為0.07m,高程最大誤差為0.026m。
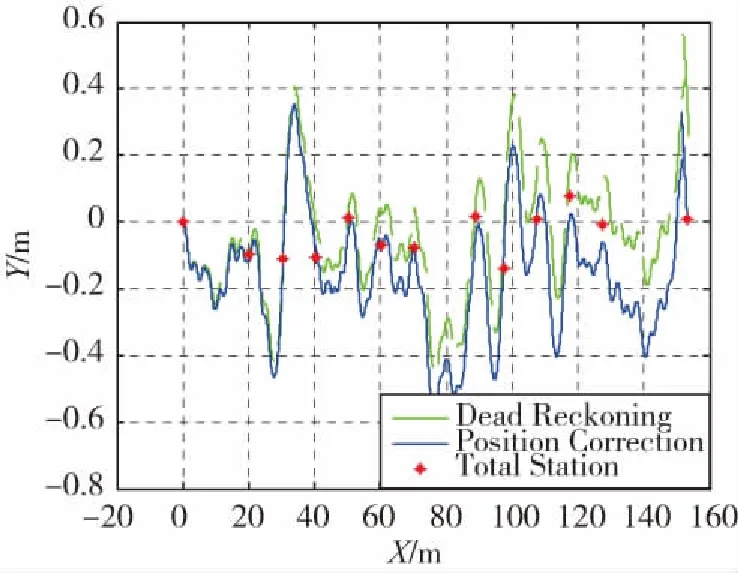
圖3 平面軌跡圖Fig.3 Plane trajectory
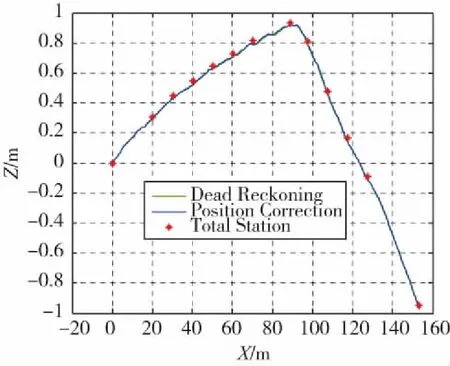
圖4 高程軌跡圖Fig.4 Altitude trajectory
圖5~圖6所示為第二條線路第二組試驗軌跡圖。從圖5中可以看出,直接采用航位推算進行測量時,X向為0.3m,Y向為0.5m。而圖6表明高程上最大誤差為0.1m。采用本文方法修正后,X向最大誤差為0.04m,Y向最大誤差為0.12m,高程最大誤差為0.07m。
修正前后軌跡對比表明采用位置修正可以提高航位推算軌跡的精度。
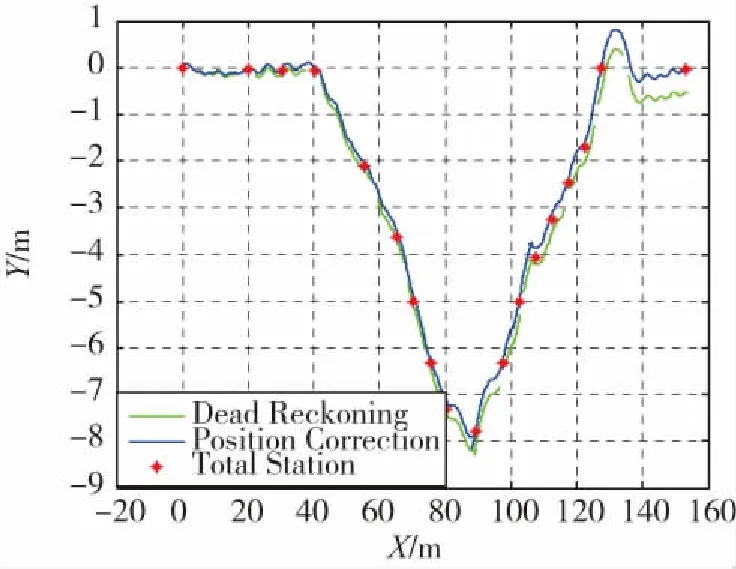
圖5 平面軌跡圖Fig.5 Plane trajectory
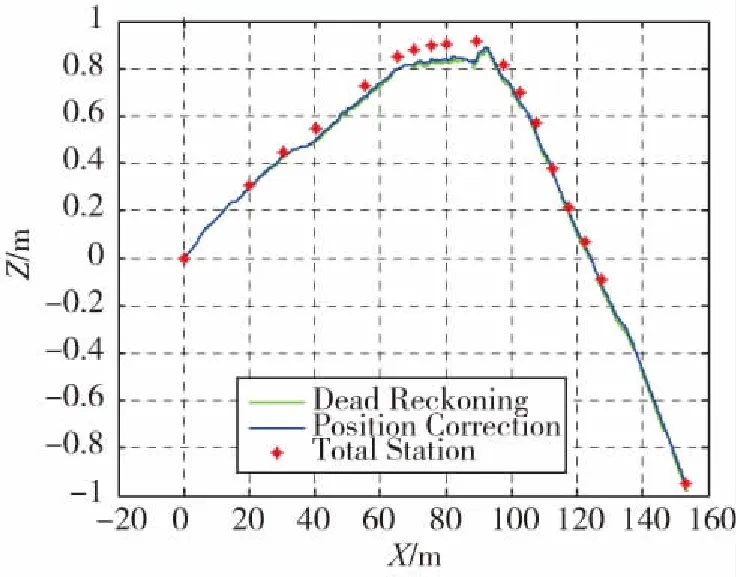
圖6 高程軌跡圖Fig.6 Altitude trajectory
4.3 試驗結果分析
試驗結果剩余誤差進行分析可能原因如下:
1)試驗路面存在裂縫、石子等,因此在行進路程中可能存在里程儀安裝輪懸空或打滑情況;
2)試驗用車體由于要安裝慣導系統、電池組等,因此質量較重,在推行過程中有上下坡情況,因此里程儀標度因數可能在行駛過程中變化;
3)推行過程盡管時間較短,但是陀螺仍在漂移,因此計算的角度誤差僅為部分誤差。
針對以上原因,可以從硬件及算法兩個方面進行改進。硬件方面可以采用提高慣性器件精度或是采用多路里程儀等手段;算法方面可以利用組合導航濾波技術對傳感器誤差進行實時修正。改進具體方法本文不作討論。
5 結論
本文提出了一種精密軌跡測量方法。首先對航位推算系統誤差方程進行了分析,根據實際使用情況對誤差方程進行了簡化,提煉出了影響系統精度的主要誤差源,針對該誤差源引入位置修正技術并進行了相關公式推導。基于以上分析提出了基于航位推算和位置修正技術的精密軌跡測量方法,最后通過試驗驗證了該方法的有效性,結果表明該軌跡測量方法實測行進153m精度優于0.12m。該方法簡單且不易受外界干擾,具有良好的工程使用前景。
[1] 徐輝.GPS接收機與全站儀相結合在長大隧道橋梁施工控制測量中的運用[J].隧道建 設,2008,28(3):355-358.
[2] 魯超.淺談公路橋梁施工控制測量中GPS的應用[J].科技研究,2014,5:56.
[3] 郭新愿,劉善華.RTK在工程測量和地形測量中的應用[J].建筑工程技術與設計,2014(6).
[4] 馮宇華.GPS技術在工程測量中的應用[J].四川建材,2016,42(1):252-253.
[5] 王立新,胡文彬.光纖陀螺應用于軌跡測量的實驗研究[J].武漢理工大學學報,2002,24(8):50-52.
[6] 段婷婷.光纖陀螺技術用于工程結構形變測量的方法研究[J].數字技術與應用,2013(1):213-214.
[7] 莫文琴,姜德生,胡文彬.基于捷聯式光纖陀螺的工程結構三維形變測量方法[J].光學與光電技術,2004,2(4):15-17.
[8] Obanijesu E O, Macaulay S R A.West African Gas Pipeline(WAGP)project:associated problems and possible remedies[M].Appropriate Technologies for Environmental Protection in the Developing World.Springer Netherlands,2009:101-112.
[9] 嚴恭敏.車載自主定位定向系統研究[D].西安:西北工業大學,2006.
[10] 崔蒞杭,張英敏.位置修正技術在航位推算中的應用[J].火力與指揮控制,2012,37(8):100-103.
ResearchonTrajectoryMeasurementBasedonPositionCorrection
CUI Li-hang, CHEN Gui-jin, WANG Yong-gang
(Hubei Sanjiang Space Hongfeng Control Co.,Ltd.,Xiaogan,Hubei 432000, China)
The traditional trajectory measurement is based on equipments like GPS and Total Station.There are some shortcomings of these methods, such as the equipment is hard to set up, the data is discontinuous, and the requirement for environment is high. A trajectory measurement method that uses the position correction technology based on the dead reckoning system is presented. The heading installation deviation angle,pitch installation deviation angle and the scale factor error of odometer can be estimated by the coordinates of the starting point and the end point. After the completion of the dead reckoning, the high-precision data can be obtained by modifying the trajectory with calculated system error. Experiment results show that the method is feasible and the error is less than 0.12m when the system travels 153m.
Trajectory measurement;Inertial navigation;Dead reckoning;Position correction*
10.19306/j.cnki.2095-8110.2017.06.007
U666.12
A
2095-8110(2017)06-0042-07
2016-07-29;
2016-09-05
崔蒞杭(1982-),男,工程師,主要從事慣性導航及組合導航研究。E-mail:clhcyf@163.com
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45