油菜紙缽苗移栽機氣動取苗機構設計與軌跡分析
2017-12-04 09:17:02廖慶喜胡喬磊
農業機械學報 2017年11期
關鍵詞:嵌入式
廖慶喜 張 照 胡喬磊 許 博
油菜紙缽苗移栽機氣動取苗機構設計與軌跡分析
廖慶喜1,2張 照1胡喬磊1許 博1
(1.華中農業大學工學院, 武漢 430070; 2.南方糧油作物協同創新中心, 長沙 410128)
針對傳統機械式取苗機構結構復雜、控制不穩定等問題,設計了一種油菜紙缽苗移栽機嵌入式氣動取苗機構。分析了嵌入式氣動取苗機構的結構組成、工作原理及運動學模型,設計了取苗機構的驅動控制系統,基于ADAMS軟件開展了機構參數變化對取苗軌跡和取苗臂姿態影響的研究,確定了取苗機構的優化參數。優化結果表明,當搖桿長度為220 mm,支撐臂長度為170 mm,旋轉臂長度為160 mm,氣缸Ⅰ原始長度為313 mm時,取苗階段取苗軌跡高度可達130 mm。當取苗軌跡高度為80 mm時,取苗軌跡直線度偏差小于2 mm,取苗階段取苗針偏角變化小于4°;投苗階段取苗針偏角變化小于1°,滿足油菜紙缽苗移栽機取苗投苗要求。試驗結果表明,該取苗機構高速攝像呈現的取苗軌跡與理論分析基本吻合,臺架試驗取苗成功率達93.0%,投苗成功率達89.5%,滿足機械自動化取苗的要求,驗證了取苗機構設計的可行性。
油菜; 移栽機; 氣動; 取苗機構; 控制系統
引言
油菜缽苗機械化移栽可緩解長江中下游的種植茬口矛盾,提高種植效率。油菜屬直根系作物,育苗期根系難以包絡基質,采用紙缽育苗有利于機械取苗和移栽而不損壞基質,避免移栽過程中待栽油菜苗脫水變蔫影響移栽效果,且帶基質移栽可增加成活率,減少緩苗期,避免裸苗移栽產生的窩根現象[1-2]。
油菜機械化移栽包括育苗、取苗、栽植、覆土、鎮壓、澆水、施肥等工序,其機械化移栽裝備主要分為手動移栽機、半自動移栽機和全自動移栽機。歐美發達國家移栽機發展較早,現以大型、高自動化和聯合作業機械為代表,而我國以半自動化為主,移栽裝備缺乏或性能低下。油菜缽苗移栽機主要針對導苗管式、吊籃式、擾性圓盤式、鉗夾式旱地移栽機進行結構改進,采用人工取苗,勞動強度大,作業效率低,代表機型主要有2XY-2型二行鏈夾式半自動油菜移栽機和2ZQ-4型油菜移栽機[3-5]。取苗機構的研發嚴重制約了油菜育苗移栽技術的發展與應用[6]。為解決油菜移栽機械取苗技術難題,國內外農機專家和學者根據缽苗特點及栽植模式進行了大量研究,主要借鑒蔬菜移栽機和水稻插秧機的取苗機構。意大利Ferrari全自動蔬菜移栽機采用頂出夾取式取苗機構,缽苗損傷率低,成排自動喂苗效率高[7];RYU等[8]設計了不同結構的氣動取苗爪,采用抓取式一定程度解決了穴盤苗自動取苗難題;日本井關農機株式會社提出的行星輪系與滑道機構組合式自動取苗機構[9-10]、CHOI 等[11]研制的五桿滑道式取苗機構以及田昆鵬等[12]研究的曲柄導桿與凸輪滑槽組合而成的門形取苗機構,可實現取苗,但滑道結構易磨損;浙江理工大學[13-16]研發了多種非圓齒輪行星輪系間歇傳動取苗機構,取苗軌跡滿足取苗要求;王蒙蒙等[17]提出了一種曲柄連桿式夾苗機構,需和穴盤苗頂出裝置配合完成取苗和投苗工作。吳俊等[3]結合水稻插秧機和油菜毯壯苗育苗技術研發的油菜毯壯苗移栽機,可實現取苗移栽,但長江中下游稻板田土壤黏重,可靠性有待提高。綜上所述,國內外移栽機取苗機構以機械式為主,自動化控制不穩定,且油菜缽苗移栽機專用取苗機構研究較少,仍處于初期階段,發展油菜缽苗自動化移栽機需突破自動化取苗技術難題。
本文以油菜紙缽苗為研究對象,設計一種基于單片機控制的自動嵌入式氣動取苗機構。通過單片機控制氣缸動作驅動取苗機構運動,使MHS4氣缸與取苗針組成的取苗末端執行器的運動軌跡滿足取苗要求,實現取苗投苗功能且能滿足多行同步取苗投苗。
1 油菜紙缽苗移栽機整機結構與工作過程
油菜紙缽苗移栽機主要由三點懸掛裝置、機架組合、空氣壓縮機、氣動取苗機構、栽植機構、紙缽苗放置裝置、取苗末端執行器和旋耕裝置等組成,其結構示意圖如圖1所示。
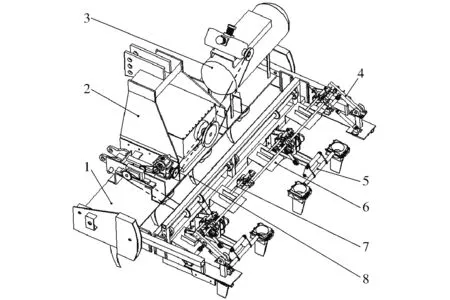
圖1 油菜紙缽苗移栽機結構示意圖Fig.1 Sketch of rape paper pot seedling transplanter1.機架組合 2.三點懸掛裝置 3.空氣壓縮機 4.氣動取苗機構 5.栽植機構 6.紙缽苗放置裝置 7.取苗末端執行器 8.旋耕裝置
工作時,油菜紙缽苗移栽機經三點懸掛裝置與拖拉機掛接,動力由拖拉機動力輸出軸提供,同時驅動旋耕裝置、空氣壓縮機和栽植機構工作。旋耕裝置高速旋轉完成苗床整備,空氣壓縮機為氣動取苗機構提供壓縮空氣,驅動其動作,使取苗末端執行器按照設定的取苗軌跡運動,將紙缽苗放置裝置內的油菜紙缽苗取出并投入鴨嘴栽植器中,通過栽植機構帶動鴨嘴栽植器運動,完成油菜紙缽苗移栽。
2 油菜紙缽苗移栽機氣動取苗機構運動分析
2.1 氣動取苗機構組成和工作過程
嵌入式氣動取苗機構是油菜紙缽苗移栽機關鍵部件之一,其主要由機架、搖桿、旋轉軸、旋轉臂、氣缸Ⅰ、氣缸Ⅱ、氣缸Ⅲ、手指氣缸、取苗針、脫苗板和電磁閥等組成,其中氣缸Ⅲ、MHS4手指氣缸、取苗針和脫苗板組成取苗末端執行器,其結構示意圖如圖2所示。氣缸Ⅰ和氣缸Ⅱ一端與機架鉸接,另一端分別與旋轉臂和搖桿鉸接;搖桿一端與機架鉸接,另一端與旋轉軸鉸接;氣缸Ⅲ和旋轉臂分別與旋轉軸固接,且兩者夾角呈45°;取苗針安裝在手指氣缸上,手指氣缸與氣缸Ⅲ活塞桿一端鉚接,脫苗板一端套在取苗針上,另一端與氣缸Ⅲ缸體鉚接。
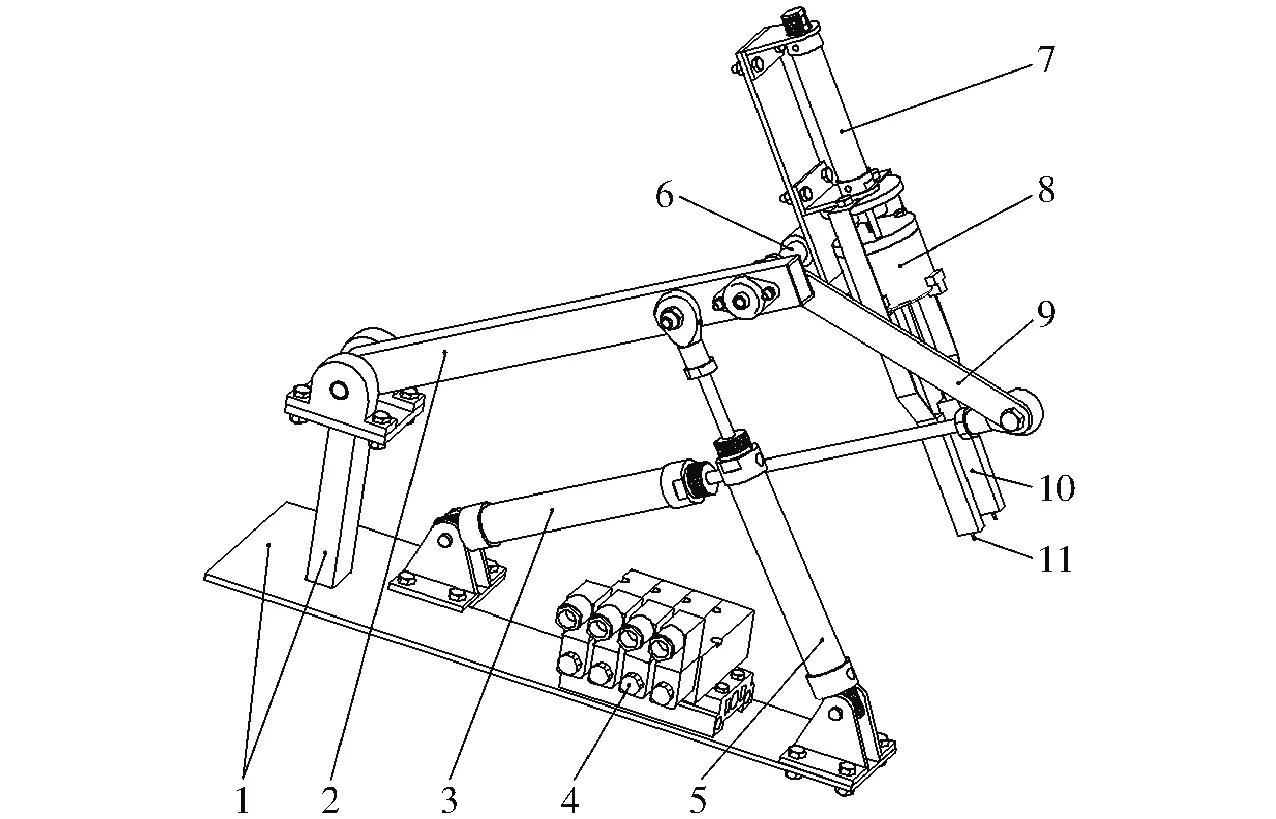
圖2 嵌入式氣動取苗機構結構示意圖Fig.2 Sketch of pneumatic pick-up mechanism1.機架 2.搖桿 3.氣缸Ⅰ 4.電磁閥 5.氣缸Ⅱ 6.旋轉軸7.氣缸Ⅲ 8.MHS4手指氣缸 9.旋轉臂 10.脫苗板 11.取苗針
為簡化控制系統,避免各氣缸復合運動影響取苗效果,氣缸動作單個逐一完成。嵌入式氣動取苗機構初始狀態如圖2所示,氣缸Ⅰ呈伸長狀態,氣缸Ⅱ和氣缸Ⅲ呈收縮狀態,手指氣缸呈張開狀態,其工作時具體步驟如下:①氣缸Ⅲ伸出,驅動手指氣缸和取苗針,使取苗針插入缽苗基質中。②手指氣缸收縮,驅動取苗針向內運動,夾緊缽苗基質。③氣缸Ⅱ伸出,驅動搖桿逆時針旋轉,使缽苗隨取苗針遠離苗箱,實現取苗。④氣缸Ⅰ收縮,驅動旋轉臂順時針旋轉,使缽苗運動到鉛垂方位,即投苗位置。⑤手指氣缸張開,驅動取苗針松開。⑥氣缸Ⅲ收縮,驅動手指氣缸和取苗針縮回,在脫苗板的推擋作用下,取苗針從缽苗基質中抽出,缽苗落入栽植器中。⑦氣缸Ⅰ伸出,氣缸Ⅱ縮回,使取苗機構回到初始狀態。
2.2 氣動取苗機構取苗針運動要求
機械自動取苗過程主要通過模擬人工取苗動作來實現。參考油菜紙缽苗自然翻轉角,設計放置油菜紙缽苗的苗箱安裝角為30°。取苗機構運動時,取苗針的運動軌跡和姿態變化對取苗效果影響較大,取苗針運動需滿足以下要求[7,14,18]:①取苗段軌跡:取苗針軌跡近似直線,與苗箱垂直最佳,直線段長度不小于苗缽高度。②取苗段擺角:取苗針擺動角越小,對缽苗基質損傷越小,與苗箱干涉越小,取苗針以定姿態取出油菜缽苗為理想狀態。③投苗角:取苗針將油菜缽苗運送至鴨嘴栽植器上方時,油菜缽苗應靠近鉛垂方位,與鴨嘴栽植器軸線偏角為零時最理想。
2.3 氣動取苗機構運動學模型建立
為了方便分析,將嵌入式氣動取苗機構進一步簡化,建立如圖3所示的直角坐標系,以氣缸Ⅰ與機架的鉸接點O作為坐標系原點,水平方向為X軸,垂直方向為Y軸,各桿角位移以X軸正方向為基準,逆時針為正。為直觀清晰,將嵌入式氣動取苗機構中氣缸Ⅲ、手指氣缸及取苗針作為取苗臂DF進行分析。在分析取苗機構的運動學模型過程中假設各零件為剛性結構,不發生彈性變形,且不考慮各轉動副之間的轉動間隙。確定機構運動狀態所需的相關參數及說明見表1,初始狀態時,AD∥OE,CB∥DF,DF⊥AD,O點與B點在同一水平線上,DE與DF夾角為45°。
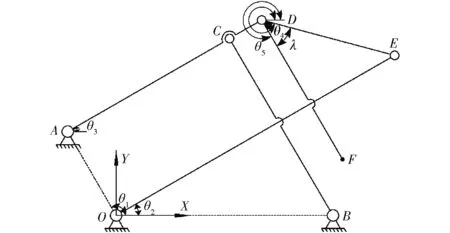
圖3 嵌入式氣動取苗機構簡化示意圖Fig.3 Schematic diagram of pneumatic pick-up mechanism
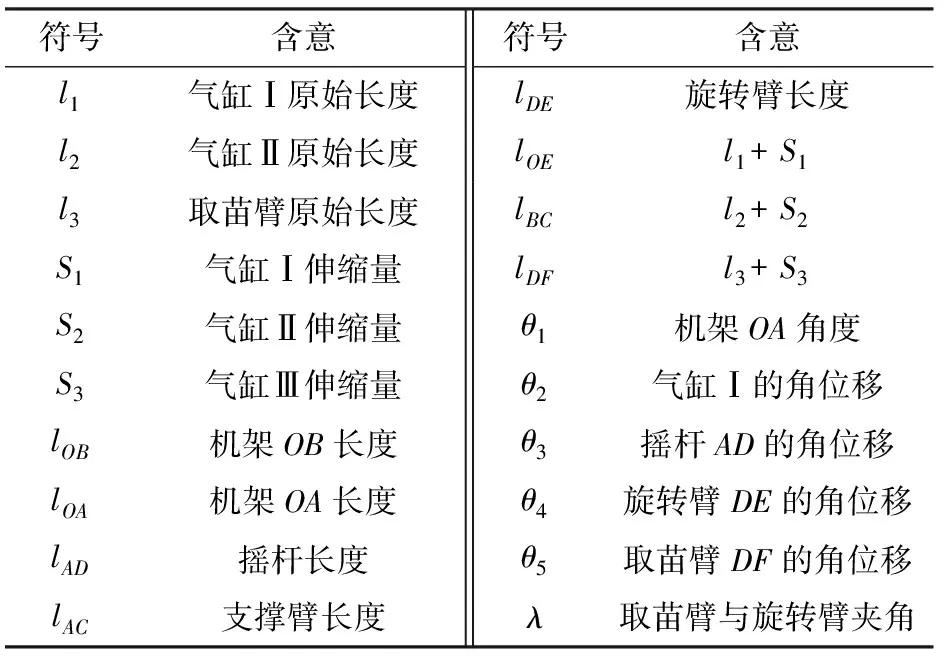
符號含意符號含意l1氣缸Ⅰ原始長度lDE旋轉臂長度l2氣缸Ⅱ原始長度lOEl1+S1l3取苗臂原始長度lBCl2+S2S1氣缸Ⅰ伸縮量lDFl3+S3S2氣缸Ⅱ伸縮量θ1機架OA角度S3氣缸Ⅲ伸縮量θ2氣缸Ⅰ的角位移lOB機架OB長度θ3搖桿AD的角位移lOA機架OA長度θ4旋轉臂DE的角位移lAD搖桿長度θ5取苗臂DF的角位移lAC支撐臂長度λ取苗臂與旋轉臂夾角
根據圖3建立封閉矢量方程為
lOF=lOA+lAD+lDF
(1)
將矢量方程轉換為解析形式,得出F點位置方程為
xO=yO=0
(2)
(3)
(4)
(5)
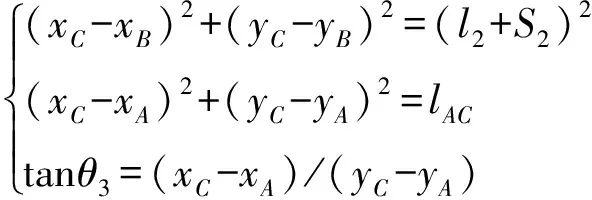
整理式(2)~(5)可得
(6)
其中
油菜紙缽苗移栽機嵌入式氣動取苗機構根據取苗步驟由各氣缸單一逐個伸縮實現取苗功能,運行過程中,不同階段對應的某個氣缸伸縮量為自變量,其余氣缸伸縮量為定值,如表2所示。
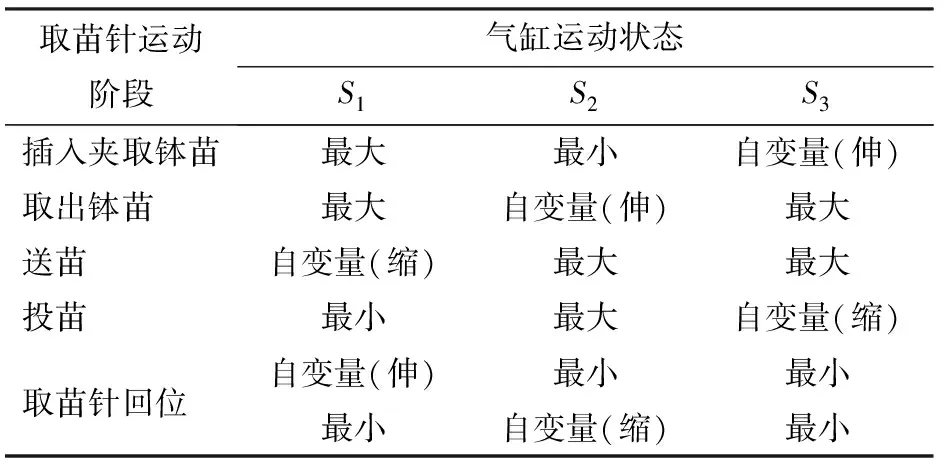
表2 取苗各階段氣缸運動狀態Tab.2 Motion states of pneumatic cylindersat different stages
不同階段對式(6)的自變量求一階和二階導數即可獲得取苗針端點F各階段的速度和加速度方程。根據運動學模型可建立取苗機構參數化模型,開展取苗軌跡優化。
3 取苗末端執行器結構設計與取苗軌跡優化
3.1 取苗末端執行器結構設計與參數確定
為了提高取苗機構的自動化程度,本文以60 mm×60 mm×30 mm的倒方錐紙缽苗為研究對象,設計了如圖4所示的取苗末端執行器,主要包括氣缸Ⅲ、MHS4手指氣缸、取苗針和脫苗板。根據苗缽上下端面大小,設定相對兩根取苗針處于張開狀態時軸線之間的距離為40 mm,取苗針根數可依據紙缽苗狀況選擇2或4根。為了避免取苗針在夾取缽體基質過程中發生變形,取苗針選擇4 mm圓鋼,一端與MHS4手指氣缸鉚接,一端呈針狀,參照適栽期油菜缽苗株高大小以及分布情況[19],取苗針長度取170 mm。脫苗板采用1 mm鋼板,與取苗針接觸部分采用封閉式結構,避免工作時損傷幼苗莖葉。工作時,進氣管通氣使氣缸Ⅲ的活塞桿伸出,驅動取苗針插入缽苗基質中,MHS4手指氣缸驅動取苗針向內運動夾緊缽苗,待取苗機構運動將缽苗取出并移送至投苗處,氣缸Ⅲ活塞桿收縮,驅動取苗針縮回,在脫苗板作用下,取苗針脫離缽苗基質,釋放缽苗。
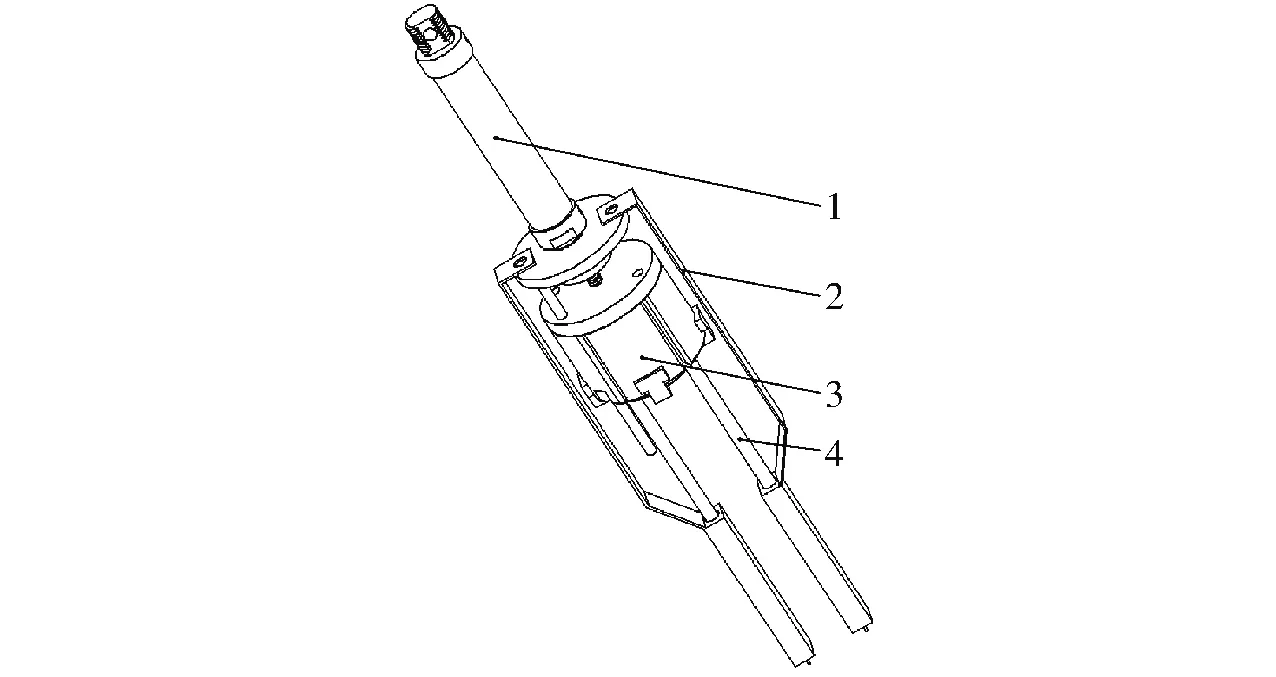
圖4 取苗末端執行器結構示意圖Fig.4 Schematic diagram of picking up seedling using end-effector1.氣缸Ⅲ 2.脫苗板 3.MHS4手指氣缸 4.取苗針
3.2 取苗機構氣缸型號及行程確定
根據油菜缽苗移栽機分苗裝置分苗過程和缽苗缽體完整性分析[20]可知,紙缽苗總質量m約為68 g,故氣缸運行過程中承受的載荷主要來自取苗機構本身。嵌入式取苗方式對取苗機構震動要求較高,震動越大,根土破壞程度越大,取苗成功率越低。為減緩氣缸運行時活塞與氣缸壁產生沖擊而導致的取苗機構震動,選用MAC系列氣緩沖型氣缸,當氣缸活塞運行至兩端時,形成氣緩沖區,避免沖擊。根據MAC系列氣缸各缸徑所能承受的載荷以及取苗機構結構緊湊要求,氣缸Ⅰ和氣缸Ⅱ選用MAC20×100型氣缸,使用壓力范圍為0.1~1.0 MPa,使用速度范圍為0.03~0.80 m/s。根據苗缽高度以及取苗針插入缽苗基質深度[21],氣缸Ⅲ選用MAC16×50型氣缸,使用壓力范圍為0.1~1.0 MPa,使用速度范圍為0.03~0.80 m/s。根據手指氣缸抓取能力和苗缽端面尺寸,選用MSH4型四爪手指氣缸。
3.3 取苗機構主要結構參數對取苗軌跡的影響
考慮取苗臂穩定性,取苗臂懸臂不宜偏長,通過分析由氣缸Ⅲ、手指氣缸和取苗針組成的取苗臂質心分布情況,設計取苗針端面至旋轉軸軸線的垂直距離即lDF為215 mm。
根據油菜紙缽苗移栽機嵌入式氣動取苗機構的結構設計,利用三維造型軟件Pro/E 5.0完成取苗機構的三維設計以及虛擬裝配,并將裝配體導入計算機仿真分析軟件ADAMS中,以所建立的運動學模型為取苗機構參數化關系的依據,利用ADAMS軟件建立取苗機構的參數化模型。在ADAMS中通過更改搖桿長度lAD、旋轉臂長度lDE、支撐臂長度lAC以及氣缸Ⅰ原始長度l1分析其對取苗軌跡和取苗針偏角α的影響。圖5~8中偏角α表示取苗機構運行過程中取苗針與其初始狀態所成偏角,投苗階段取苗針與鉛垂方向偏角為α+30°。
如圖5所示,lDE=160 mm,lAC=170 mm,l1=313 mm時,搖桿長度lAD主要影響取苗階段軌跡直線度、軌跡高度以及取苗針偏角。隨著搖桿長度lAD的增加,軌跡直線度先增加后減小,軌跡高度逐漸增大,取苗階段取苗針偏角變化趨勢逐漸陡峭。
如圖6所示,lAD=170 mm,lDE=160 mm,l1=313 mm時,支撐臂長度lAC主要影響取苗階段軌跡高度以及投苗階段取苗針偏角。隨著支撐臂長度lAC的增加,取苗階段軌跡高度逐漸減小,投苗階段取苗針與鉛垂方向偏角先減小后增大。
如圖7所示,lAD=170 mm,lDE=160 mm,lAC=170 mm時,氣缸Ⅰ原始長度l1主要影響取苗階段軌跡直線度以及取苗階段取苗針偏角。隨著氣缸Ⅰ原始長度l1的增加,取苗階段軌跡直線度先增大后減小,取苗針偏角變化趨勢逐漸陡峭。
如圖8所示,lAD=170 mm,lAC=170 mm,l1=313 mm時,旋轉臂長度lDE主要影響取苗階段軌跡直線度、取苗階段取苗針偏角以及投苗階段取苗針偏角。隨著旋轉臂長度lDE的增加,取苗階段軌跡直線度先增加后減少,取苗階段取苗針偏角變化趨勢分析油菜紙缽苗移栽機嵌入式氣動取苗機構各結構參數對取苗軌跡及取苗針偏角影響,獲得了一組滿足油菜紙缽苗自動取苗要求的結構參數:搖桿長度lAD為220 mm,支撐臂長度lAC為170 mm,旋轉臂長度lDE為160 mm,氣缸Ⅰ始長度l1為313 mm。該參數組合下取苗軌跡及取苗針偏角如圖9所示。取苗階段取苗軌跡高度可達130 mm,當取苗軌跡高度為80 mm時,取苗軌跡直線度偏差小于2 mm,取苗針偏角變化小于4°;投苗階段取苗針偏角變化小于1°,滿足油菜紙缽苗移栽機取苗投苗要求。
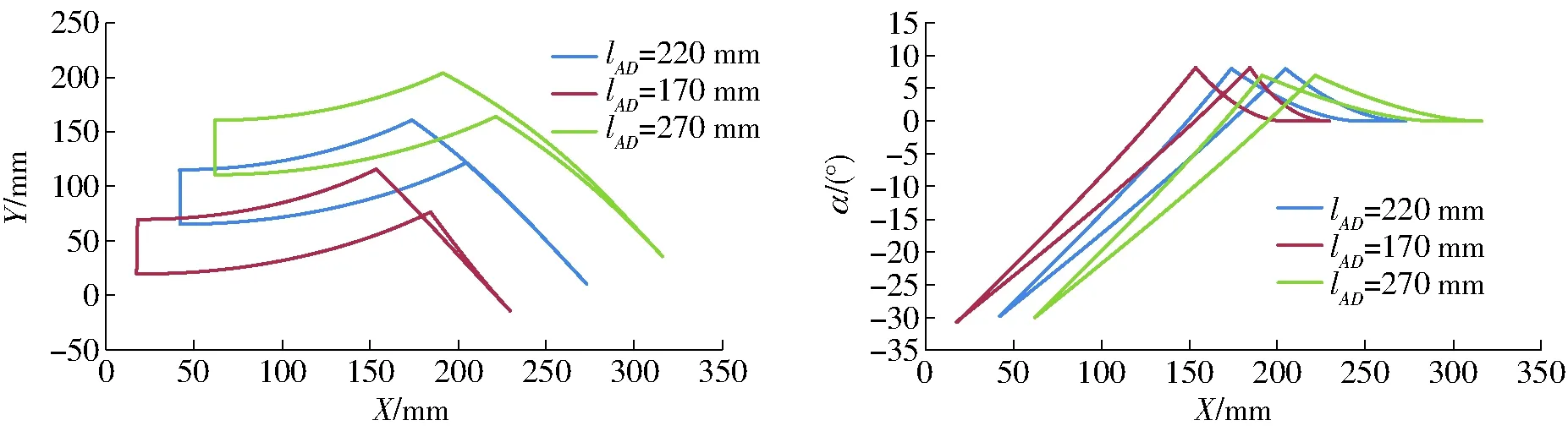
圖5 搖桿AD長度對取苗軌跡及取苗針偏角的影響Fig.5 Influence of length of AD on trajectory and declination
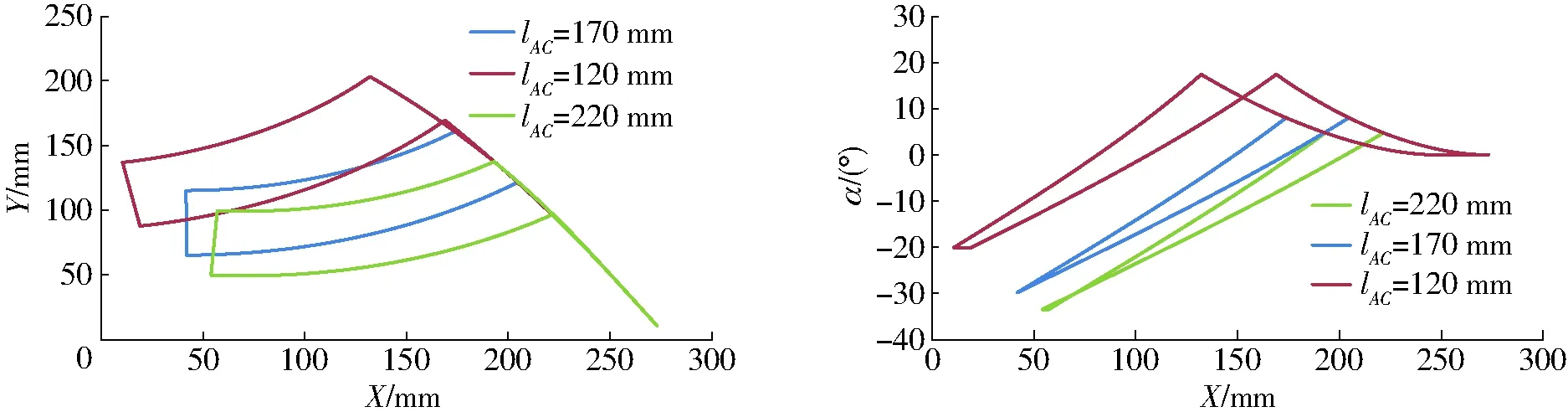
圖6 支撐臂AC長度對取苗軌跡及取苗針偏角的影響Fig.6 Influence of length of AC on trajectory and declination
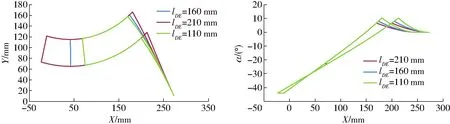
圖8 旋轉臂DE長度對取苗軌跡及取苗針偏角的影響Fig.8 Influence of length of DE on trajectory and declination
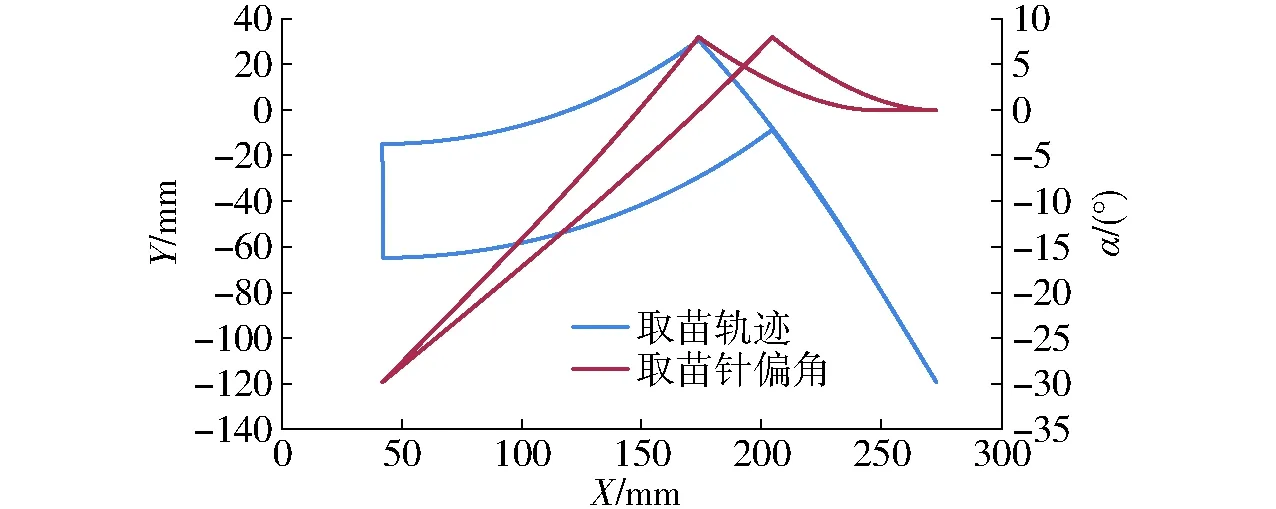
圖9 優化后取苗軌跡及取苗針偏角Fig.9 Optimized trajectory and declination
3.4 取苗機構執行過程中紙缽苗運動分析
當氣缸均以最大額定速度800 mm/s運行時,取苗針端點速度變化曲線如圖10所示。
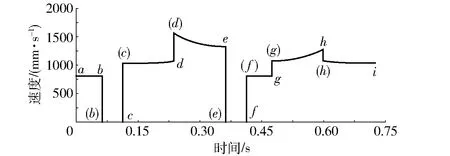
圖10 取苗針端點速度變化曲線Fig.10 Speed curve of picking-up needle end point
由圖10可知,ab段表示取苗針插入缽苗基質階段,取苗針端點勻速直線運動;bc段表示取苗針夾緊基質階段,取苗針端點在XY平面內速度為零;cd段表示將缽苗取出苗箱階段,取苗針端點近似勻速直線運動;de段表示將缽苗從苗箱上方移送至投苗點階段,取苗針端點圓周運動;ef段表示取苗針松開基質階段,取苗針端點在XY平面內速度為零;fg段表示取苗針抽離缽苗基質階段即投苗階段,取苗針端點勻速直線運動;ghi段表示取苗機構回程階段。分析取苗針端點運動形式以及運動速度可知,改變氣缸運行速度,取苗針端點速度變化趨勢不變,如圖10所示,且de段缽苗最易從取苗針滑落,導致取苗失敗。
3.5 取苗針端點運動軌跡試驗
取苗針端點實際工作軌跡即缽苗空間運動軌跡,其合理性和準確性是取苗機構設計是否成功的關鍵[22]。應用高速攝像技術進行樣機取苗針端點運動軌跡與理論軌跡的對比分析。
高速攝像試驗所用設備及軟件:PCD.dimax HD、CamWare V3.09型高速攝像系統、Startrails圖像分析軟件。試驗過程中,采用Startrails圖像分析軟件對所拍攝照片進行疊加處理,選用高速攝像機的拍攝頻率為1 000幀/s,空氣壓縮機工作氣壓為0.8 MPa,獲得樣機取苗針端點實際運動軌跡,如圖11所示。
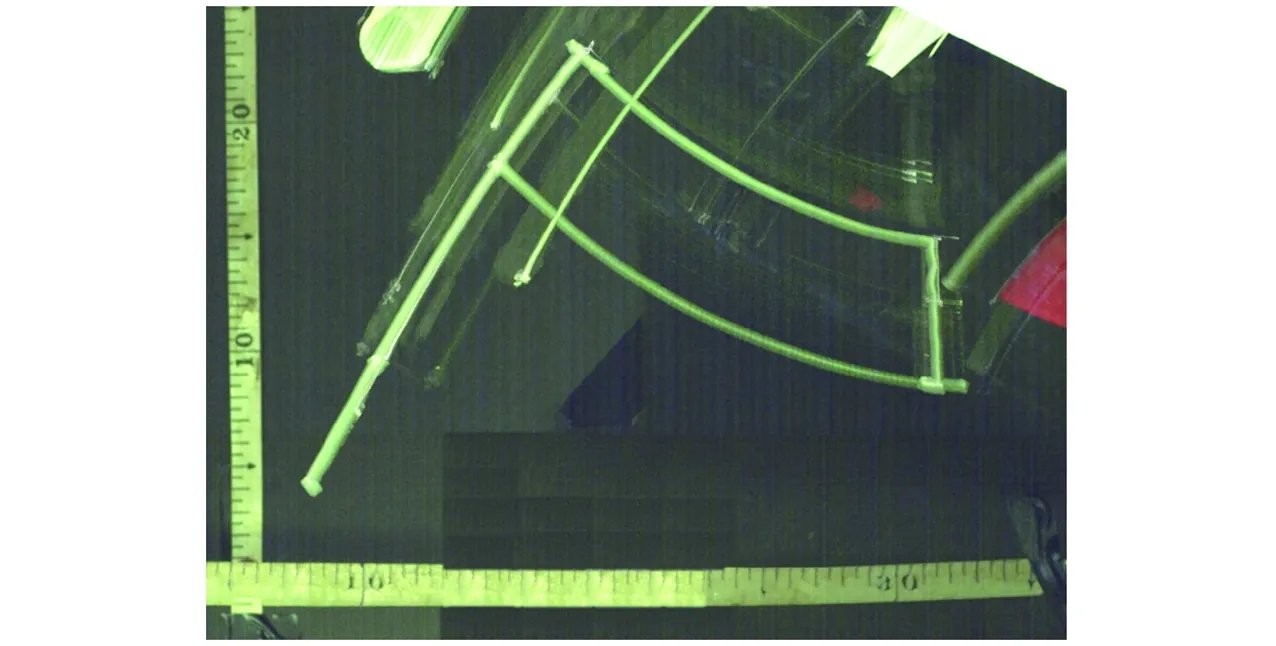
圖11 取苗針端點高速攝影運動軌跡Fig.11 Movement trajectory of seedling claw given by high-speed photography
對比仿真軌跡(圖9)與高速攝像獲得取苗軌跡(圖11)可知,取苗軌跡變化趨勢基本一致,但各氣缸各動作銜接處取苗軌跡存在一定偏差,主要原因如下:機構運轉中試驗臺振動及零部件加工誤差;氣缸活塞桿運行至氣缸端部時與氣缸壁產生沖擊導致取苗針往復式振動。
4 驅動控制系統設計
油菜紙缽苗移栽機嵌入式氣動取苗機構所有部件運動均由單片機控制氣缸完成,氣動動力源由空氣壓縮機提供。取苗系統以時間為信號,根據各氣缸設置的動作時間由單片機控制氣動控制閥,達到對各氣缸動作的控制。氣動驅動系統如圖12所示,A為氣缸Ⅰ,B為氣缸Ⅱ,C為氣缸Ⅲ,D為手指氣缸,J1~J8為節流閥,DT1~DT4為二位五通電磁換向閥,R為空氣過濾器,U為壓力表,Z為儲氣罐,W為冷卻器,P為空氣壓縮機。氣缸Ⅰ~Ⅲ和手指氣缸均由二位五通電磁換向閥控制。取苗系統中氣缸的運行速度由安裝在氣缸兩端的節流閥控制,通過調節節流閥,使氣缸運行速度適中,無沖擊現象,且使氣缸達到行程端兩端的時間稍提前于設定時間,便于各氣缸連續動作時嵌入式氣動取苗機構作業平穩。
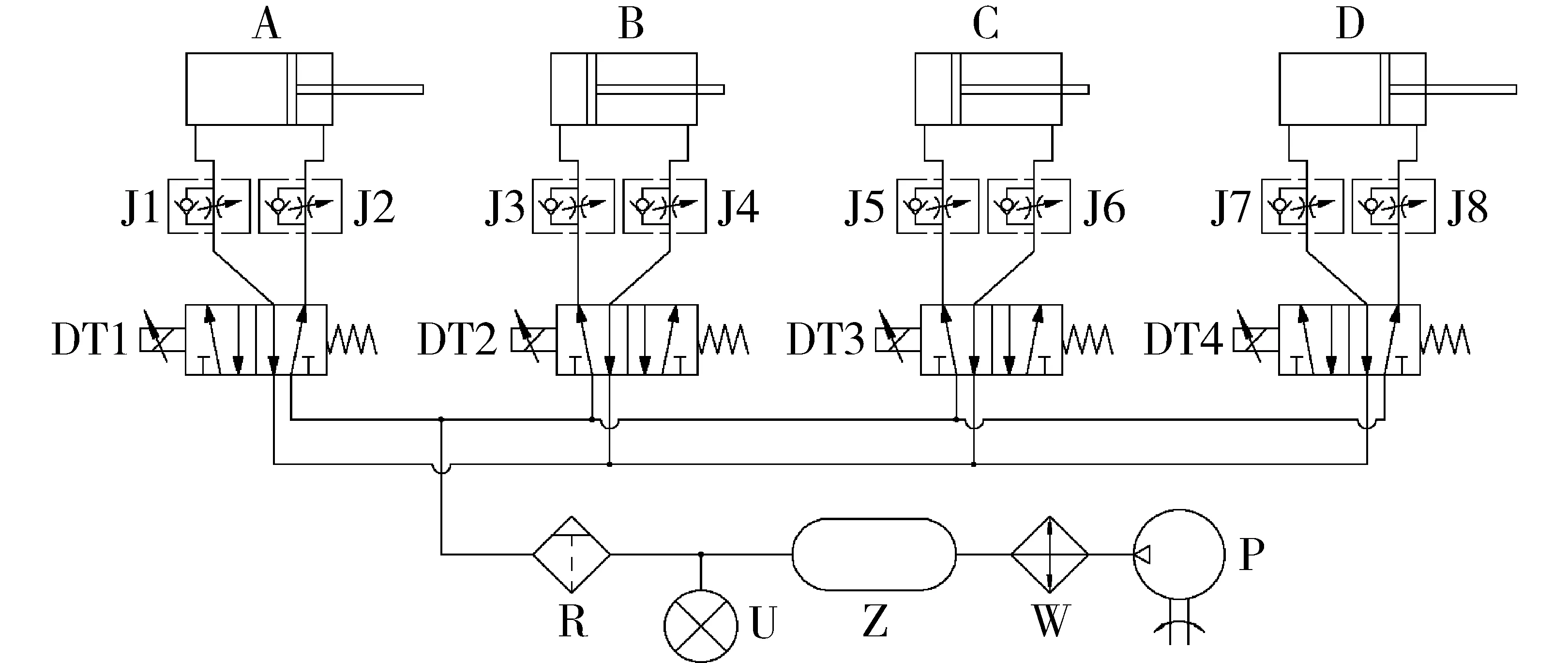
圖12 氣動驅動系統原理圖Fig.12 Schematic diagram of pneumatic driving system
按照油菜紙缽苗移栽機嵌入式氣動取苗機構的工作流程,為單片機連接輸入和輸出控制信號。當氣動系統作業時,各氣缸工作時序圖如圖13所示, Q0.1~Q0.4為控制系統輸出信號;t1~t7為各階段對應氣缸開始動作的時刻;T為取苗周期。啟動控制器,DT3動作,氣缸Ⅲ伸長,驅動取苗針插入油菜缽苗基質中;t1時刻,DT4動作,手指氣缸收縮,驅動取苗針夾緊油菜缽苗基質;t2時刻,DT2動作,氣缸Ⅱ伸長,驅動搖桿將油菜缽苗從苗箱中取出;t3時刻,DT1動作,氣缸Ⅰ收縮,驅動取苗臂將油菜缽苗送至鴨嘴栽植器正上方;t4時刻,DT4動作,手指氣缸張開,驅動取苗針松開油菜缽苗基質;t5時刻,DT3動作,氣缸Ⅲ收縮,在脫苗板的推擋作用下驅動取苗針從油菜缽苗基質中抽出,完成投苗動作;t6時刻,DT1動作,氣缸Ⅰ伸長,驅動取苗臂回到初始位置;t7時刻,DT2動作,氣缸Ⅱ收縮,驅動搖桿回到初始位置;T時刻,整個取苗過程完成。
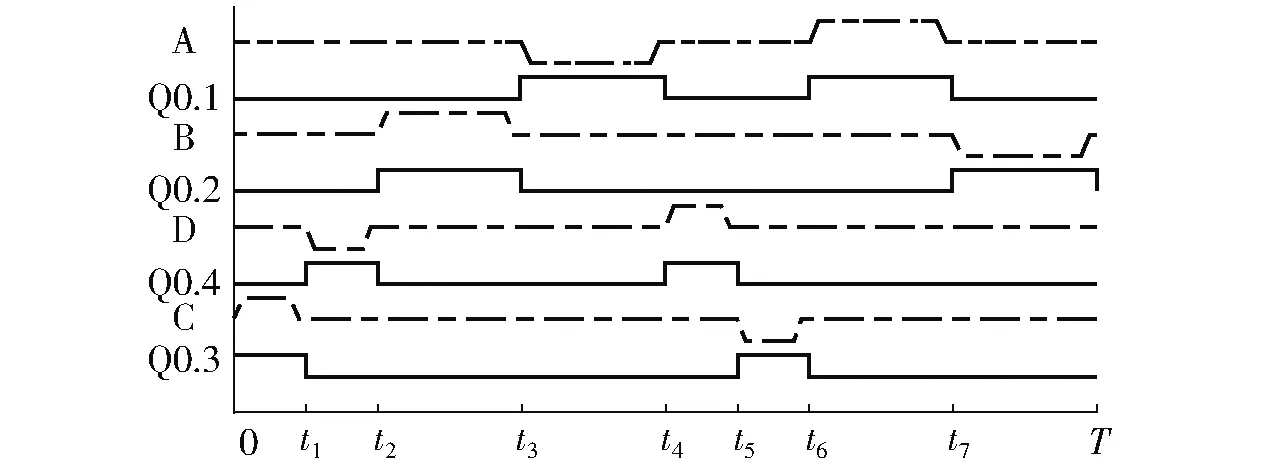
圖13 氣缸時序圖Fig.13 Operation timing chart of air cylinder
根據本文選用的各氣缸參數,計算取苗機構氣動系統最大空氣體積流量[23],計算公式為

(7)
式中Q——氣缸所需的空氣體積流量,L/min
D——氣缸缸徑,cm
S——氣缸行程,cm
p——氣缸工作壓力,MPa
油菜紙缽苗移栽機嵌入式氣動取苗機構氣動系統耗氣量計算相關參數如表3所示。
由表中計算可知,油菜紙缽苗移栽機嵌入式氣動取苗機構氣動系統耗氣總量為1.378/T。為保證單個取苗機構氣動系統工作時氣壓穩定,在配套移栽機使用和試驗時應選擇容積流量大于1.378/T的空氣壓縮機。
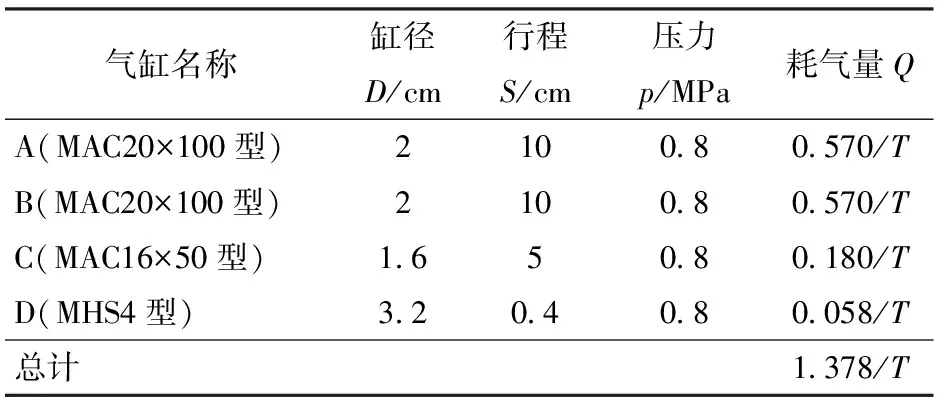
表3 氣動系統耗氣量計算相關參數Tab.3 Relevant parameters of air consumptioncalculation for pneumatic system
5 氣動取苗機構取苗臺架試驗
取苗試驗采用“華油雜62”油菜品種,培育在穴口尺寸60 mm×60 mm,穴底尺寸30 mm×30 mm,缽高為60 mm的倒方錐紙缽中,育苗基質采用營養土與自然土壤1∶2混合。試驗時,油菜缽苗基質含水率約為20%,設置嵌入式氣動取苗機構取苗頻率為20次/min,每次連續取苗20株,共進行10次試驗。測定試驗中油菜缽苗取苗成功率和投苗成功率[24],其取苗試驗如圖14所示,試驗結果如表4所示。
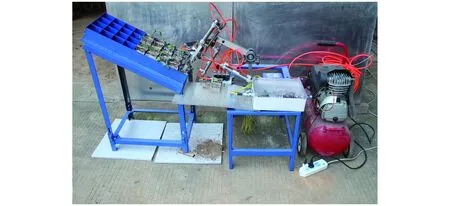
圖14 取苗機構臺架試驗Fig.14 Prototype test of seedling pick-up mechanism
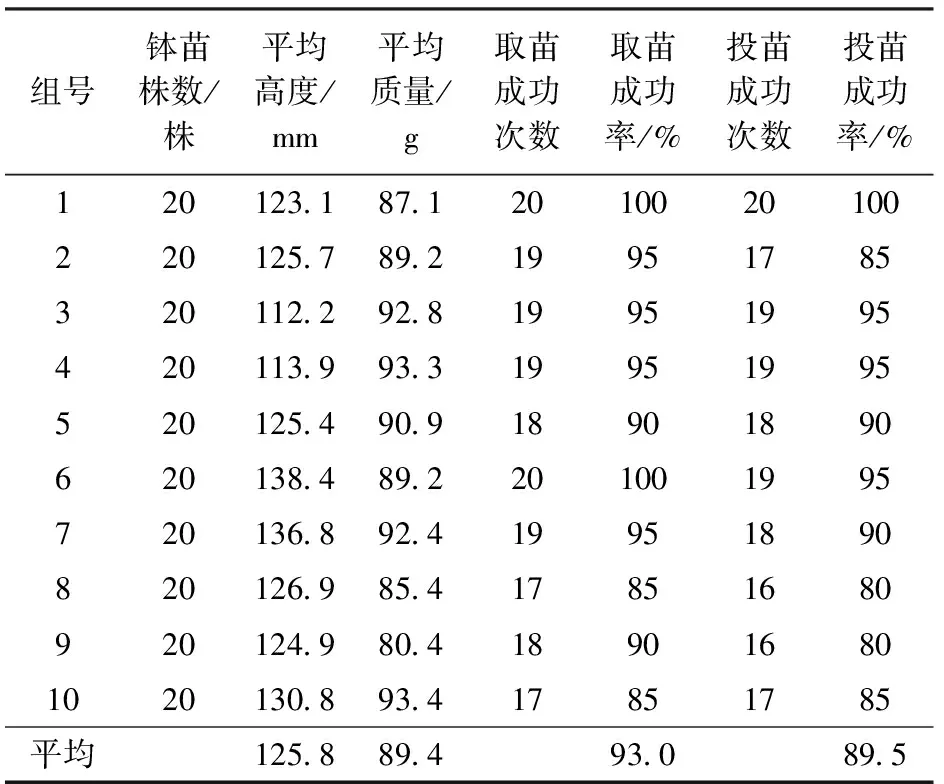
組號缽苗株數/株平均高度/mm平均質量/g取苗成功次數取苗成功率/%投苗成功次數投苗成功率/%1201231871201002010022012578921995178532011229281995199542011399331995199552012549091890189062013848922010019957201368924199518908201269854178516809201249804189016801020130893417851785平均1258894930895
取苗試驗表明,取苗成功率達到93.0%,投苗成功率達到89.5%,取苗時缽苗基質損失較小,取苗機構基本能實現將油菜紙缽苗從苗盤中順利取出的要求,但也存在取苗不成功的比例,主要影響要素有:①缽苗基質松散,油菜幼苗根系不發達,未將基質完全包絡,取苗指針未能將油菜紙缽苗成功取出。②嵌入式氣動取苗機構工作時,各氣缸運動沖擊及取苗機構振動導致油菜紙缽苗提前滑落。
6 結論
(1)設計了一種油菜紙缽苗嵌入式氣動取苗機構,分析了該取苗機構的結構組成和工作原理,建立了取苗機構的運動學模型及驅動控制系統。
(2)確定了嵌入式氣動取苗機構結構參數:搖桿長度為220 mm,支撐臂長度為170 mm,旋轉臂長度為160 mm,氣缸Ⅰ原始長度為313 mm。該組參數下,取苗階段取苗軌跡高度可達130 mm,當取苗軌跡高度為80 mm時,取苗軌跡直線度偏差小于2 mm,取苗針偏角變化小于4°;投苗階段取苗針偏角變化小于1°,滿足油菜紙缽苗移栽機取苗投苗要求。
(3)開展了高速攝影試驗,取苗軌跡與理論分析基本吻合;取苗機構臺架試驗表明,取苗成功率達93.0%,投苗成功率達89.5%,驗證了該取苗機構設計的可行性。
1 向偉,吳明亮,官春云,等.履帶式油菜苗移栽栽植孔成型機的設計與試驗[J].農業工程學報,2015,31(15):12-18.
XIANG Wei, WU Mingliang, GUAN Chunyun, et al. Design and experiment of planting hole forming device of crawler transplanter for rape (Brassicanapus) seedlings[J]. Transactions of the CSAE, 2015, 31(15): 12-18. (in Chinese)
2 廖慶喜,劉明峰,張照,等.油菜缽苗移栽機雙五桿栽植機構多目標優化設計[J/OL].農業機械學報,2015,44(11):49-56. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20151108amp;flag=1.DOI:10.6041/j.issn.1000-1298.2015.11.008.
LIAO Qingxi, LIU Mingfeng, ZHANG Zhao, et al. Multi-objective optimization design of double five-bar transplanting mechanism for rape pot seedling[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 44(11):49-56. (in Chinese)
3 吳俊,湯慶,袁文勝,等.油菜毯狀苗移栽機開溝鎮壓部件設計與參數優化[J].農業工程學報,2016,32(21):46-53.
WU Jun, TANG Qing, YUAN Wensheng, et al. Design and parameter optimization of ditching and compacting parts of rapeseed carpet seedling transplanter[J]. Transactions of the CSAE, 2016, 32(21): 46-53. (in Chinese)
4 葉秉良,俞高紅,陳志威,等.偏心齒輪-非圓齒輪行星系取苗機構的運動學建模與參數優化[J].農業工程學報,2011,27(12):7-12.
YE Bingliang, YU Gaohong, CHEN Zhiwei, et al. Kinematics modeling and parameters optimization of seedling pick-up mechanism of planetary gear train with eccentric gear and non-circular gear[J]. Transactions of the CSAE, 2011, 27(12): 7-12. (in Chinese)
5 崔巍,方憲法,趙亮,等.齒輪-五桿取苗裝置機構優化與試驗驗證[J/OL].農業機械學報,2013,44(8):74-77. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20130813amp;flag=1. DOI:10.6041/j.issn.1000-1298.2013.08.013.
CUI Wei, FANG Xianfa, ZHAO Liang, et al. Structural optimization and experimental verification of geared five-bar linkage seedling pick-up device[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(8): 74-77. (in Chinese)
6 王躍勇,于海業.穴盤幼苗機械手取苗基質完整率影響因素試驗與分析[J].農業工程學報,2015,31(14):65-71.
WANG Yueyong, YU Haiye. Experiment and analysis of impact factors for soil matrix intact rate of manipulator for picking-up plug seedlings[J].Transactions of the CSAE, 2015, 31(14): 65-71. (in Chinese)
7 李華,曹衛彬,李樹峰,等.辣椒穴盤苗自動取苗機構運動學分析與試驗[J].農業工程學報,2015,31(23):20-27.
LI Hua, CAO Weibin, LI Shufeng, et al. Kinematic analysis and test on automatic pick-up mechanism for chiliplug seedling[J]. Transactions of the CSAE, 2015, 31(23): 20-27. (in Chinese)
8 RYU K H, KIM G, HAN J S. Development of a robotic transplanter for bedding plants[J]. Automation and Emerging Technologies,2001,78(2):141-146.
9 TAKEYAMA T. Vegetable transplanter: Japan, JP 2003-76923 A[P].2003-03-20.
10 ITO N, KIYOMIZU S, NIGITA S, et al. Transplanting machine: Japan, JP 1998-318431 A[P].1998-10-20.
11 CHOI W C, KIN D C, RYU I H, et al. Development of seeding pick-up device for vegetable transplants[J].ASAE,2002,45(1):13-19.
12 田昆鵬,毛罕平,胡建平,等.自動移栽機門形取苗裝置設計與試驗研究[J].農機化研究,2014(2):168-172.
TIAN Kunpeng, MAO Hanping, HU Jianping, et al. Design and experimental study on the door-shaped picking seedling mechanism of auto-transplanter[J]. Journal of Agricultural Mechanization Research, 2014(2): 168-172. (in Chinese)
13 趙雄,王川,楊茂祥,等.非圓齒輪行星輪系自動取苗機構逆向設計分析[J].農業工程學報,2015,31(16):30-36.
ZHAO Xiong, WANG Chuan, YANG Maoxiang, et al. Reverse design and analysis of automatic seedling pick-up mechanism with non-circular gear planetary train[J]. Transactions of the CSAE, 2015, 31(16): 30-36. (in Chinese)
14 趙雄,沈明,陳建能,等.棉花移栽機旋轉式取苗機構的運動學分析及虛擬試驗[J].農業工程學報,2014,30(8):13-20.
ZHAO Xiong, SHEN Ming, CHEN Jianneng, et al. Kinematic analysis and virtual experiment of rotary pick-up mechanism on cotton transplanter[J]. Transactions of the CSAE, 2014, 30(8):13-20. (in Chinese)
15 葉秉良,李麗,俞高紅,等.蔬菜缽苗旋轉式取苗機構動力學分析與試驗[J/OL].農業機械學報,2014,45(6):70-78. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20140612amp;flag=1. DOI:10.6041/j.issn.1000-1298.2014.06.012.
YE Bingliang, LI Li, YU Gaohong, et al. Dynamics analysis and test of rotary pick-up mechanism for vegetable pot-seeding[J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(6): 70-78. ( in Chinese)
16 俞亞新,駱春曉,俞高紅,等.橢圓-不完全非圓齒輪行星系取苗機構參數優化[J/OL].農業機械學報,2013,44(6):62-68.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20130612amp;flag=1. DOI:10.6041/j.issn.1000-1298.2013.06.012.
YU Yaxin, LUO Chunxiao, YU Gaohong, et al. Parameters optimization of pick-up mechanism of planetary gear train with ellipsegears and incomplete non-circular gear[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(6): 62-68.(in Chinese)
17 王蒙蒙,宋建農,劉彩玲,等.蔬菜移栽機曲柄擺桿式夾苗機構的設計與試驗[J].農業工程學報,2015,31(14):49-57.
WANG Mengmeng, SONG Jiannong, LIU Cailing, et al. Design and experiment of crank rocker type clamp seedlings mechanism of vegetable transplanter[J]. Transactions of the CSAE, 2015, 31(14): 49-57. (in Chinese)
18 金鑫,李樹君,楊學軍,等.蔬菜穴盤苗取苗機構分析與參數優化[J/OL].農業機械學報,2013,44(增刊1) :1-6,13. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=2013s101amp;flag=1.DOI:10.6041/j.issn.1000-1298.2013.S1.001.
JIN Xin, LI Shujun, YANG Xuejun, et al. Analysis and parameter optimization for vegetable plug seedling pick up mechanism[J/OL].Transactions of the Chinese Society of Agricultural Machinery, 2013,44(Supp.1): 1-6, 13. (in Chinese)
19 劉明峰,胡先朋,廖宜濤,等.不同油菜品種適栽期機械化移栽植株形態特征研究[J].農業工程學報,2015,31(增刊1):79-88.
LIU Mingfeng, HU Xianpeng, LIAO Yitao, et al. Morphological parameters characteristics of mechanically transplanted plant in suitable transplanting period for different rape varieties [J]. Transactions of the CSAE, 2015, 31(Supp.1): 79-88. (in Chinese)
20 廖慶喜,胡先朋,張照,等.油菜移栽機分苗裝置分苗過程與缽苗缽體完整性分析[J/OL].農業工程學報,2015,31(16):22-29.
LIAO Qingxi, HU Xianpeng, ZHANG Zhao, et al. Analysis on detaching process of detaching device and seedling pot integrity about rape transplanter[J/OL]. Transactions of the CSAE, 2015, 31(16): 22-29. (in Chinese)
21 趙雄,陳建能,楊茂祥,等.二階自由非圓齒輪行星系缽苗移栽機取苗機構[J/OL].農業機械學報,2014,45(4):123-127. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20140419amp;flag=1. DOI:10.6041/j.issn.1000-1298.2014.04.019.
ZHAO Xiong, CHEN Jianneng, YANG Maoxiang, et al. Seeding pick-up mechanism of planetary gear train with two-order general non-circular gears[J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(4):123-127. (in Chinese)
22 周梅芳,俞高紅,趙勻,等.橢圓齒輪行星輪系蔬菜缽苗取苗機構的參數優化與試驗[J].農業工程學報,2014,30(18):13-21.
ZHOU Meifang, YU Gaohong, ZHAO Yun, et al. Parameter optimization and test on pick-up mechanism of planetary gear train with ellipse gears for vegetable plug seedling[J]. Transactions of the CSAE, 2014, 30(18): 13-21. (in Chinese)
23 成大先.機械設計手冊單行本-氣壓傳動[M].北京:化學工業出版社,2004.
24 韓長杰,楊宛章,張學軍,等.穴盤苗移栽機自動取喂系統的設計與試驗[J].農業工程學報,2013,29(8):51-61.
HAN Changjie, YANG Wanzhang, ZHANG Xuejun, et al. Design and test of automatic feed system for tray seedings transplanter[J]. Transactions of the CSAE, 2013, 29(8): 51-61. (in Chinese)
DesignandTrajectoryAnalysisofPneumaticPicking-upMechanismforRapePaperPotSeedling
LIAO Qingxi1,2ZHANG Zhao1HU Qiaolei1XU Bo1
(1.CollegeofEngineering,HuazhongAgriculturalUniversity,Wuhan430070,China2.SouthernRegionalCollaborativeInnovationCenterforGrainandOilCropsinChina,Changsha410128,China)
An embedded pneumatic picking-up mechanism was designed to solve the problem of complex structure and control instability existing in the traditional mechanical picking-up mechanism. According to the design requirements of picking-up mechanism, the constitution of mechanism, working principle and kinematics model of embedded pneumatic picking-up mechanism were clarified, and the control system based on singlechip was developed. The influence of mechanism parameter variation on the phase-trajectory of picking-up seedlings and the posture of picking-up arms were studied based on ADAMS software. The simulation results showed that the straightness deviation of picking-up trajectory was related to the length oflAD,lDEandl1, the height of picking-up trajectory was related to the length oflADandlAC. The optimization combination of structural parameters achieved was as follows:lADof 220 mm,lACof 170 mm,lDEof 160 mm andl1of 313 mm, while the height of picking-up trajectory was 130 mm. When the height of picking-up trajectory was 80 mm, the straightness deviation of picking-up trajectory was less than 2 mm, the angle of declination was less than 4° at taking seedling stage,and the angle of declination was less than 1° at throwing seedling stage. The consistency verification experiment was carried out using high speed photography system. According to the seedling picking-up experiment, the success rate of seedling pick-up reached 93.0% and the success rate of dropping seedling attained to 89.5%, which satisfied the requirements of actual testing. The research for the automatic picking-up mechanism provided an important theoretical basis and reference for the design, analysis and further study on automatic picking-up and transplanting mechanism.
rape; transplanter; pneumatic; pick-up mechanism; control system
10.6041/j.issn.1000-1298.2017.11.009
S223.92
A
1000-1298(2017)11-0070-09
2017-02-22
2017-05-11
農業科研杰出人才及創新團隊項目、國家油菜產業技術體系專項(CARS-12)和湖北省技術創新專項重大項目(2016ABA094)
廖慶喜(1968—),男,教授,博士生導師,主要從事油菜機械化生產技術與裝備研究,E-mail: liaoqx@mail.hzau.edu.cn
猜你喜歡
家庭影院技術(2021年7期)2021-08-14 02:58:44
電子制作(2019年7期)2019-04-25 13:17:14
成都信息工程大學學報(2018年4期)2019-01-23 06:57:18
電子制作(2018年18期)2018-11-14 01:48:16
電子制作(2018年16期)2018-09-26 03:27:18
鐵道通信信號(2018年2期)2018-04-18 12:18:23
制造技術與機床(2017年3期)2017-06-23 08:11:50
電子制作(2017年8期)2017-06-05 09:36:15
電鍍與環保(2016年3期)2017-01-20 08:15:32
單片機與嵌入式系統應用(2014年9期)2014-03-11 15:35:13