基于LabVIEW Robotics移動式探測車避障功能設計
2017-11-27 05:59:59王忠強謝麗蓉王晉瑞
實驗技術與管理 2017年11期
王忠強, 謝麗蓉, 王晉瑞, 高 磊
(新疆大學 電氣工程學院, 新疆 烏魯木齊 830047)
基于LabVIEW Robotics移動式探測車避障功能設計
王忠強, 謝麗蓉, 王晉瑞, 高 磊
(新疆大學 電氣工程學院, 新疆 烏魯木齊 830047)
以LabVIEW Robotics Starter Kit 2.0硬件平臺為基礎,結合LabVIEW輔助工具包,設計了具有避障功能的移動探測車。上位機與下位機通信采用串口通信方式,以LabVIEW 2015為主軟件,將Robotics 2015、Sensors、FPGA、Real-Time、Processing Targets等輔助工具包嵌入到主軟件,通過在LabVIEW Robotics 2015軟件編程設置移動探測車手動啟停、自動避障功能。測試表明:該平臺的搭建不僅可以實現移動探測車避障功能,而且有利于編程簡單化和減少工作量。
移動式探測車; 避障功能; LabVIEW Robotics; DaNI2.0平臺
如何實現機器人快速避開障礙物,到達指定地點是研究移動機器人的重點[1-2]。目前,多數研究主要集中在路徑規劃與避障的算法上[3-5],如改進遺傳算法、蟻群算法、魚群算法,仿真結果表明以上算法具有一定的可行性,但是算法復雜、開發工作量大。以高校實驗室為主的移動機器人避障的開發,可以在一定程度上解決算法帶來的不足,文獻[6-8]運用LabVIEW軟件在實驗中完成實驗系統的設計;文獻[9-11]用LabVIEW軟件與硬件平臺結合完成實驗平臺的設計與檢測;文獻[12]將LabVIEW軟件與教學相結合,搭建了適合學生自主學習的仿真平臺。
1 系統構建方案
1.1 硬件系統介紹
硬件部分采用Parallax公司的PING系列產品的超聲波傳感器,頻率為40 kHz,探測距離范圍為0~3 m,可以完成精確的非接觸式測量;伺服電機采用2個12 V的直流電機,分別驅動小車左右輪;前輪為萬能導向輪,旋轉范圍360°;Single-Board RIO嵌入式控制器開發板控制模塊用NI Single-Board 9632為核心,控制器處理速度為400 Hz,內存128 MB,內置集成了實時處理器(Real-Time模塊),2 MB可重復設置現場可編程門陣列(FPGA模塊)、模擬和數字I/O,并可擴展內置模擬和數字I/O。上位機是本地計算機,運行在LabVIEW 2015 軟件平臺上,進行程序的編寫和下載到控制器;上位機負責與下位機的通信,為遠程用戶提供訪問服務以及數據采集,下位機由以上硬件負責,通過傳輸線與上位機連接,從而實現對移動探測車的控制。DaNI 2.0探測車測試平臺見圖1。
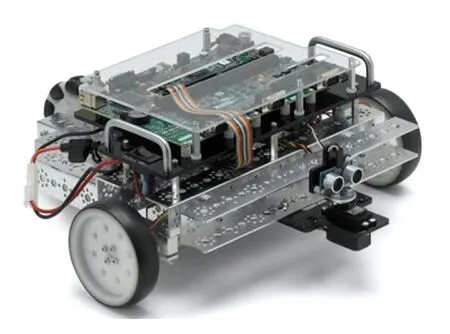
圖1 DaNI 2.0探測車測試平臺
1.2 軟件系統介紹
LabVIEW 2015是美國國家儀器公司(National Instruments,NI)推出的一款以“圖形化語言”為方式的集成化程序開發軟件,其用圖標代替傳統編程的文本,建立應用程序的圖形化編輯語言。實驗人員可以通過友好的圖形界面及圖形化編程語言控制實驗平臺運行,完成對控制信號的采集以及對輸出信號的分析等,并可以通過修改輸入參數,得到不同的控制效果。LabVIEW Robotics 2015軟件(工具包)除了提供標準的用于設計探測車和自主控制系統的程序,還提供了豐富的探測車函數庫,集成了智能操作和感知的運動控制基礎算法,可以用于設計探測車傳感器和執行機構。此外,還將Sensors、FPGA、Real-Time、Processing Targets等輔助開發軟件(工具包)內嵌到LabVIEW 2015主軟件以配合使用、編程,縮短設計開發時間。LabVIEW Robotics 2015開發程序基礎圖見圖2。
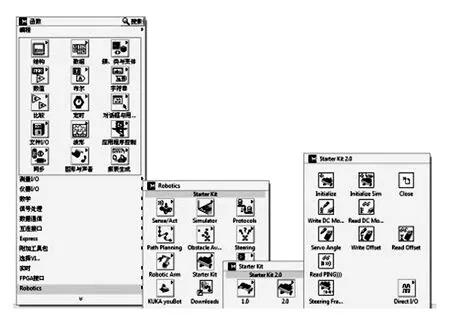
圖2 LabVIEW Robotics 2015開發程序基礎圖
2 避障功能總體構思
移動探測車系統以NI LabVIEW Robotics Starter Kit 2.0硬件平臺為基礎進行拓展和開發。采用兩輪差速轉向式的機械機構:前面2個輪是主動輪,由2臺直流伺服電機驅動,后輪采用一個支撐架,在支撐架下方安裝轉向摩擦的輪子(功能類似于萬向輪)。這樣,可以通過控制驅動輪電機的速度來移動探測車的方向和速度。超聲波測距傳感器發射40 MHz超聲波信號,并對超聲回波進行接收,經嵌入式控制器運算處理,實現探測車對前端障礙距離的檢測,PC機通過傳輸線與探測車的控制器連接,將采集的信號送至PC機的相應軟件界面顯示,PC機安裝LabVIEW 2015及Robotics 2015、Sensors、FPGA、Real-Time、Processing Targets等輔助軟件(工具包),從而實現避障功能。總體構思結構框圖見圖3。
3 系統軟件設計及開發
機器人避障功能設計采用LabVIEW 2015和Robotics 2015以及其他工具包為軟件開發平臺,該設計有3部分內容,即前面板的設計、框圖和程序的設計,以及目標和連接器的配置。LabVIEW程序設計采用了模塊化、結構化的方法,在編寫程序框圖前,首先要確定編程所需要的各個函數功能模塊,然后再編寫程序,最后根據各個模塊的功能要求擬定參數并進行調試和修改。編程的程序代碼以程序框圖表示,需在可執行程序框圖中進行編程,前面板上為輸入和輸出功能模塊,后面板為程序組成連接模塊。程序框圖包括前面板上系統初始化、系統參數配置、傳感器數據采集和數據保存控件的連線端子以及函數、結構、連線等。程序設計流程見圖4。
3.1 初始化模塊
模塊初始化中,前面板設置初始化的數值包括起點位置歸零;因為終點位置是障礙物,無法在初始化環節設置,所以設置一個顯示按鈕,顯示最終的障礙物距離。初始化中,機器人左右兩輪伺服電機以及旋轉角度均歸零,以便在運動的過程中實時顯示當前信息。此外,前面板中還有一個布爾量按鈕和讀取距離按鈕。布爾量按鈕用來對數值清零,距離按鈕對數值進行保存并顯示機器人行走的距離。初始化功能程序框圖見圖5。
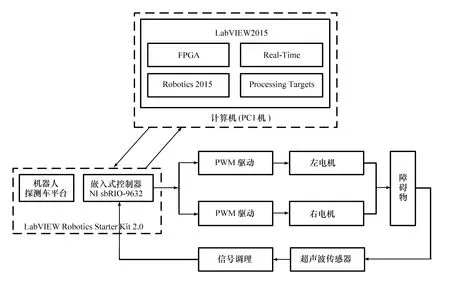
圖3 LabVIEW探測車避障功能總體結構框圖
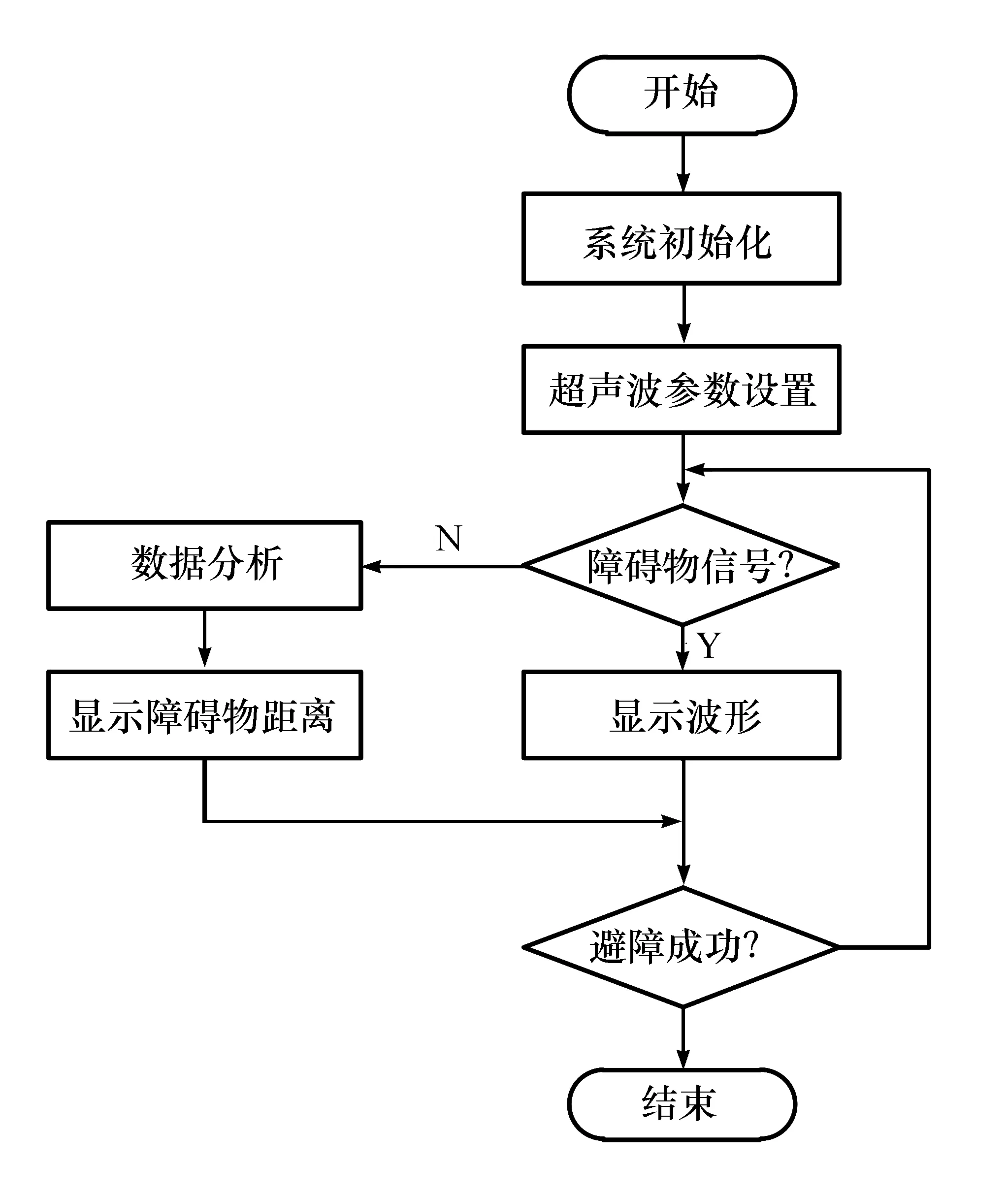
圖4 程序設計流程圖
3.2 電機循環控制模塊
電機循環控制模塊設計中,采用Robotics 2015 Starter Kit 2.0基礎編輯圖形,以單平鋪方式展開。設計機器人左右兩輪伺服電機循環控制,首先設置機器人與PC之間連接的IP地址,保證連接通暢;在單層平鋪框中,設置機器人兩輪的前進速度和傳感器旋轉角度;while語句中設置1 000 ms為一個循環周期,在while語句內部,選擇條件框圖,分別為“超時”條件、“停止”條件、“前進速度與旋轉角度”條件等具有條件判斷性的語句,每一個條件下都有相應的程序框圖;while語句設置了4個移位寄存器,分別將探測車與FPGA通信的數據流、探測車運動數據流和錯誤數據流,在每次循環的終點又送回下一次循環的起點,以保證每次循環正確可靠。電機循環控制程序框圖見圖6。
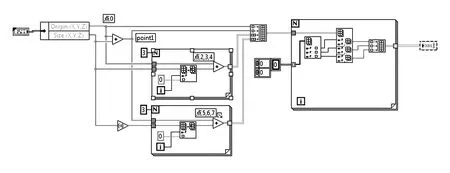
圖5 初始化功能程序框圖
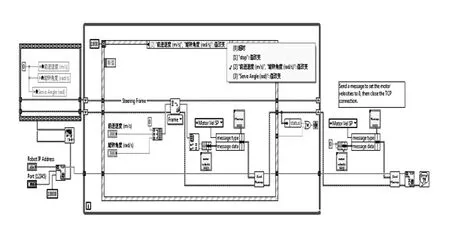
圖6 電機循環控制程序框圖
3.3 速度計算模塊
控制器控制機器人的移動,當控制器將命令信號輸出到驅動程序時,機器人的運動軌跡將遵循輸出的命令信號。控制器給出典型的三段式運動速度曲線(包括加速、勻速和減速),加速段是梯形圖的左邊,從停止位置開始加速到規定的目標速度,達到目標速度至一定的時間段由控制器決定,設定距離障礙物的距離閾值,接近閾值時,開始減速段的減速運動,直到速度減到零,停止到設置的閾值距離。三段式運動速度v曲線見圖7。
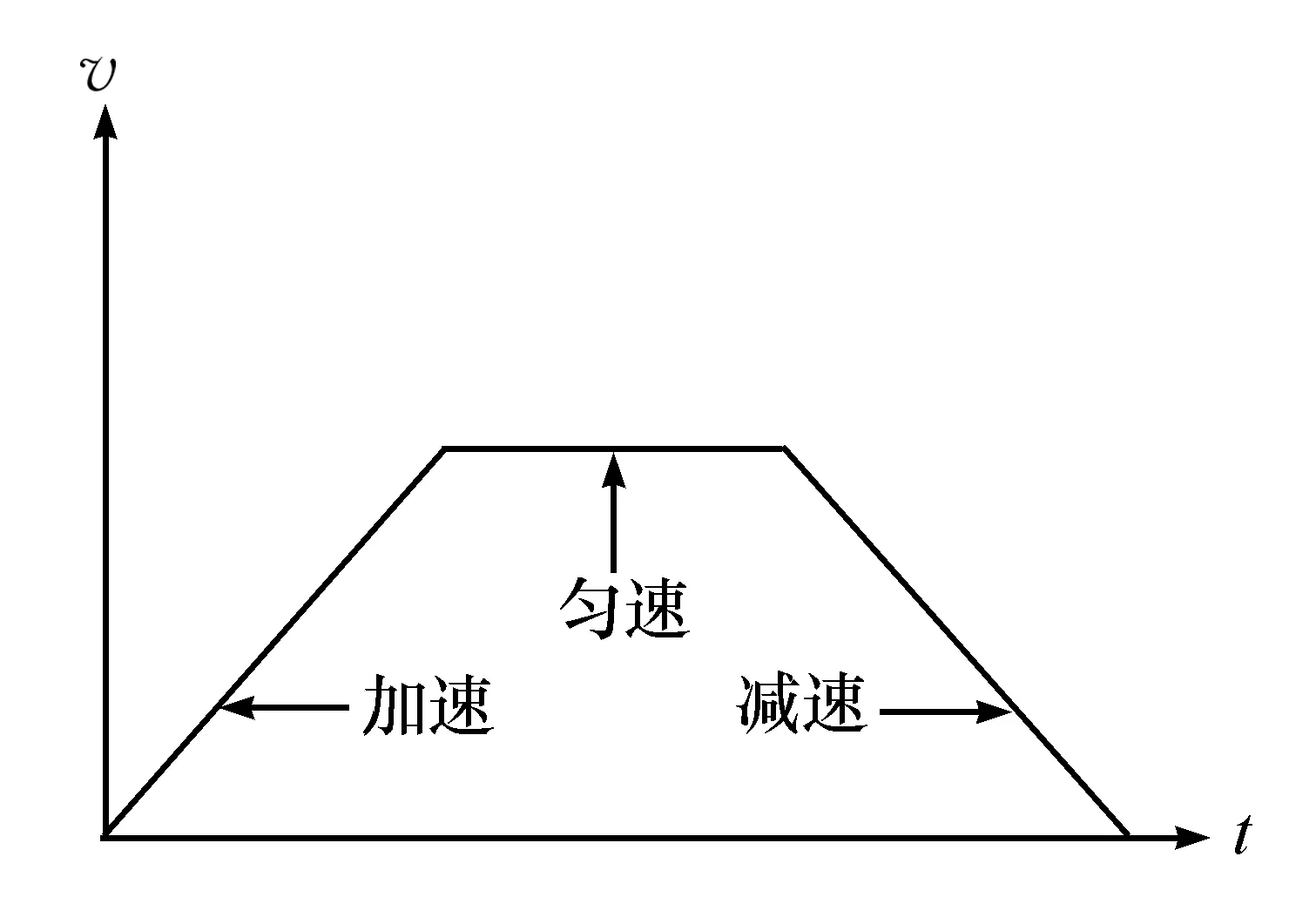
圖7 三段式運動速度曲線
以加速階段為例,傳感器檢測到障礙物的距離信號,并轉化成電壓信號,電壓信號再轉化成加速值,如下式:
式中,Vcc為基準電壓,g為重力加速度,g=9.8 m/s2。
在while循環中,嵌套條件結構1和條件結構2,在結構中編寫加速、勻速和減速的程序,此3個階段的數值(寄存在X-Axis)都可在傳感器上讀取,a與X-Axis設置好的加速度相比較,若alt;-1為加速階段,-1lt;alt;1.5為勻速階段,agt;1.5為減速階段,對應的加速程序框圖見圖8。
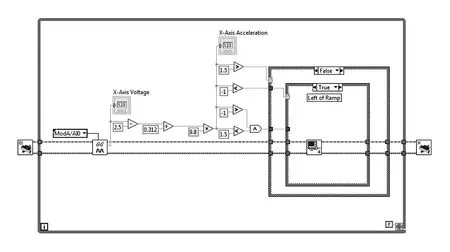
圖8 加速運動速度程序框圖
3.4 避障運動功能模塊
避障運動功能采用二級平鋪順序結構設計。一級平鋪順序結構放置左、右電機和旋轉角度的圖形化程序;二級平鋪順序結構一方面放置機器人循環控制的圖形化程序,保證對機器人的控制,另一方面,上位機與下位機之間的設置傳輸控制協議(TCP)要相符,保證超聲波傳感器測的數據準確無誤,避障運動功能程序框圖見圖9。
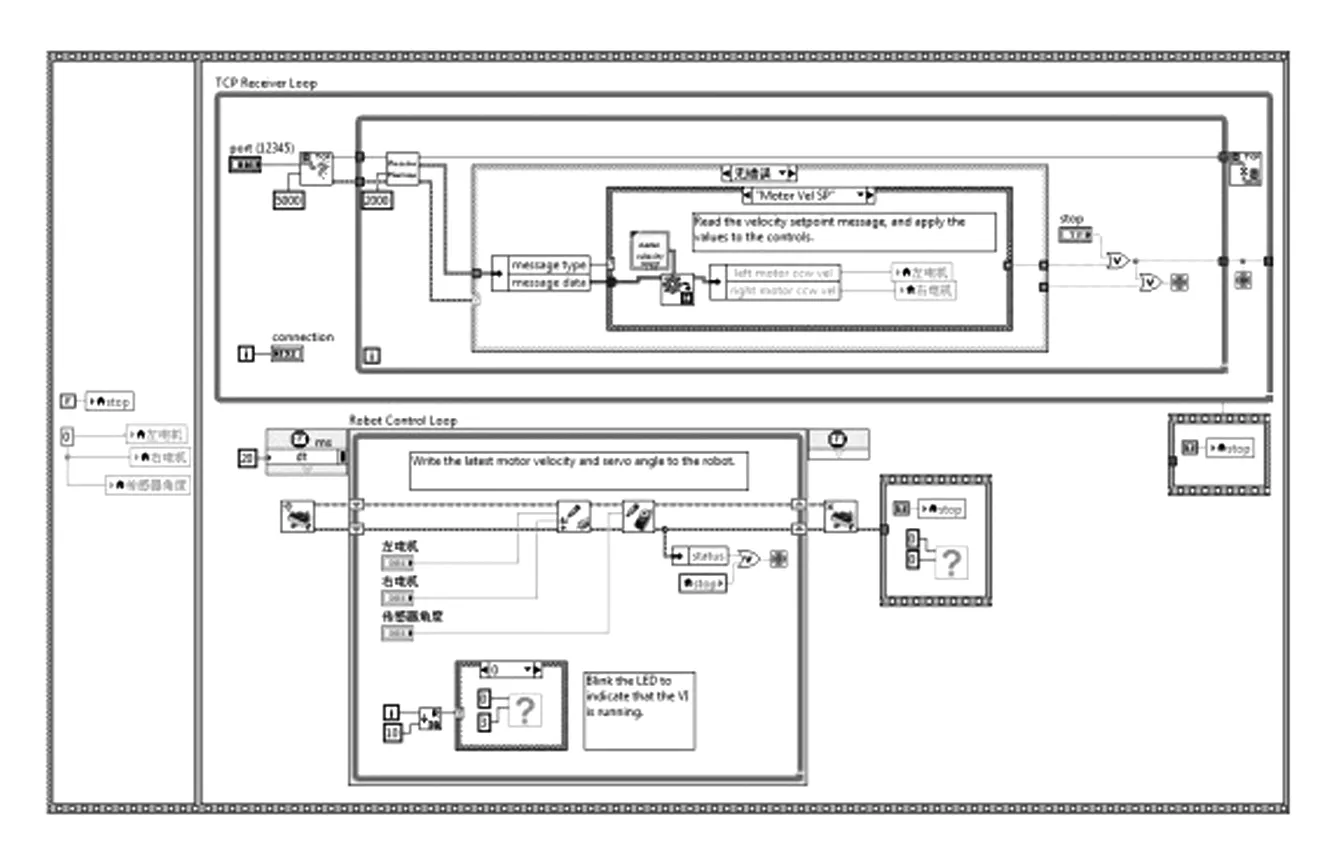
圖9 避障運動功能程序框圖
4 結語
本文在LabVIEW Robotics Starter Kit 2.0硬件平臺基礎之上,進行了移動式探測車(機器人)的避障功能設計。重點介紹了設計的流程與步驟,采用圖形化編程語言減少了設計開發的時間及工作量,完成了系統初始化、電機控制、速度計算以及避障等功能設計,最后順利通過DaNI 2.0探測車平臺現場演示,達到預期目標。
References)
[1] 尚偉燕,李舜酩.六輪腿式探測車行走機構結構設計及動力學分析[J].機械制造,2010(10):15-18.
[2] 路朋,謝麗蓉,常一峰,等.基于LabVIEW探測車運動功能的設計[J].實驗技術與管理,2015,32(12):143-145,154.
[3] 石鐵峰.改進遺傳算法在移動機器人路徑規劃中的應用[J].計算機仿真,2011(4):193-195,303.
[4] 張銀玲,牛小梅.蟻群算法在移動機器人路徑規劃中的仿真研究[J].計算機仿真,2011(6):231-234.
[5] 周利坤,劉宏昭.自適應人工魚群算法在清罐移動機器人路徑規劃中的應用[J].機械科學與技術,2012(7):1085-1089.
[6] 楊明剛,賈艷麗.基于LabVIEW的公共場所分布式節能監控系統設計[J].實驗技術與管理,2013,30(11):93-97.
[7] 趙莉華,張亞超,金陽,等.基于LabVIEW和Matlab虛擬實驗室的實現[J].實驗室研究與探索,2014,33(4):62-64,67.
[8] 陳福彬,柴海莉,高晶敏.基于LabVIEW的自動化測試平臺的設計[J].國外電子測量技術,2012,31(11):9-14.
[9] 羅建,雷勇,黃昊,等.基于LabVIEW的遠程電機實驗臺的構建[J].實驗技術與管理,2014,31(3):122-125.
[10] 廖柏林,毛凱文,劉暢,等.基于LabVIEW的電子線路虛擬實驗平臺設計與實現[J].科技視界,2017(2):29.
[11] 張軍,陶君,許振華,等.基于虛擬仿真技術的CAN總線柔性化測控實驗平臺[J].實驗室研究與探索,2017,36(7):97-102.
[12] 周雅,殷志鋒.LabVIEW環境下信號處理類課程信息化實驗仿真平臺[J].實驗技術與管理,2013,30(1):137-140.
Design on obstacle avoidance function of mobile detection vehicle based on LabVIEW Robotics
Wang Zhongqiang, Xie Lirong, Wang Jinrui, Gao Lei
(College of Electrical Engineering, Xinjiang University, Urumqi 830047, China)
Based on the hardware platform of LabVIEW Robotics Starter Kit 2.0, and combined with the LabVIEW auxiliary toolkit, a mobile detection vehicle with obstacle avoidance function is designed. The serial communication method is used to communicate the host computer with the lower computer, and the LabVIEW 2015 is adopted as the main software to embed the assistant tool kits such as Robotics 2015, Sensors, FPGA, Real-Time, Processing Targets, etc., into the main software. Through the LabVIEW Robotics 2015 software programming, the manual start and stop, and automatic obstacle avoidance functions of a mobile detection vehicle are set up. The experimental results show that the platform can not only realize the obstacle avoidance function of the mobile detection vehicle, but also simplify the programming and reduce the workload.
mobile detection vehicle; obstacle avoidance function; LabVIEW Robotics; DaNI2.0 platform
10.16791/j.cnki.sjg.2017.11.022
TP242
A
1002-4956(2017)11-0086-05
2017-04-13
國家自然科學基金項目(51264036);新疆大學“運動控制系統”精品課程建設項目(XJU201202)
王忠強(1989—),男,陜西榆林,在讀碩士研究生,主要研究方向為控制系統優化設計
E-mailxjdxwang@163.com
謝麗蓉(1969—),女,湖南衡陽,教授,研究方向為控制系統優化設計.
E-mailwzywwwxr@163.com
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
中國科技論壇(2017年7期)2017-07-25 08:49:53
Coco薇(2017年5期)2017-06-05 08:53:16
媽媽寶寶(2017年2期)2017-02-21 01:21:24
國際漢語學報(2016年1期)2017-01-20 08:21:20
中國中醫藥現代遠程教育(2014年22期)2014-03-01 04:32:55