一種面向GPS單頻RTK的周跳探測算法
2017-11-24 07:09:51金星王玲黃文德
全球定位系統 2017年5期
關鍵詞:方法
金星,王玲,黃文德
(1.湖南師范大學 物理與信息科學學院,湖南 長沙 410012; 2.國防科技大學 機電工程與自動化學院,湖南 長沙 410073)
一種面向GPS單頻RTK的周跳探測算法
金星1,2,王玲1,黃文德2
(1.湖南師范大學 物理與信息科學學院,湖南 長沙 410012; 2.國防科技大學 機電工程與自動化學院,湖南 長沙 410073)
針對傳統碼-載波相位周跳探測方法應用于單頻RTK時,存在的對小周跳不敏感、易受碼觀測噪聲的影響等問題,本文提出一種多普勒觀測值輔助的單頻周跳探測方法。該方法將連續兩個相鄰歷元多普勒觀測值與載波相位差分觀測值相結合,以構造實時周跳探測的多普勒-載波相位差分序列。然后應用假設檢驗方法,檢測單頻載波相位觀測值是否存在周跳。實測數據分析表明:本文提出的方法能夠準確探測單頻載波相位觀測數據中的小周跳,且該方法對周跳探測的靈敏度比傳統碼-相位差分序列方法更高,適用于單頻RTK定位技術。
周跳探測;單頻RTK;多普勒觀測;差分序列;假設檢驗
0 引 言
目前,GNSS導航定位已經被廣泛應用在各個領域,比如行人導航、汽車導航、測繪、精密農業等領域。雖然不同應用領域對導航定位精度的要求也不盡相同,但對高精度位置服務的需求卻與日俱增。
在高精度定位領域應用比較廣泛的RTK技術就是采用載波相位觀測值來獲取高精度定位。然而在GNSS接收機進行連續的載波相位測量過程中,由于某種原因會導致整周計數發生錯誤,就會使載波相位觀測值較之正常值出現一個整數周的跳躍,但不足一周的部分仍然正常,該跳躍稱為周跳。文獻[1]指出引起周跳的主要原因有:1) 信號遮擋;2) 到達接收機處衛星信號的信噪比低;3) 接收機或者衛星故障;4) 接收機的運動。文獻[2]指出使用低成本單頻GPS接收機進行RTK定位時,周跳將會更加頻繁的發生。
在模糊度解算過程中,針對周跳的處理策略可以分為三類: 1) 單歷元模糊度解算; 2) 當出現周跳時,對模糊度進行初始化; 3) 只在模糊度解算開始時,進行初始化,當出現周跳時,進行修復。第一類周跳處理策略,可以避免繁瑣的周跳探測與修復算法,然而單歷元模糊度解算需要高精度的偽距觀測值,且在Kalman濾波中沒有考慮模糊度觀測值作為常量的特性,又由于偽距觀測值精度通常比較低,因此,GPS單頻RTK不適合采用該策略處理周跳。基于上述原因,在GPS單頻RTK定位中,只有成功、可靠的探測周跳才能更好的進行周跳修復,才能避免模糊度參數頻繁初始化,加快模糊度的收斂速度。目前雙頻觀測值的周跳探測的方法很多:文獻[3]和[4]利用P碼偽距和雙頻的載波相位的組合構造MW和LG組合觀測量來探測周跳,該方法的實質是利用電離層延遲在歷元間變化緩慢的特性,具有較高的周跳探測精度[5-7]。然而,單頻周跳探測仍然是一個開放性的問題,特別是對于動態導航定位。
1 單頻RTK觀測值噪聲特性分析
周跳探測靈敏度一般會受到觀測噪聲的影響,在電離層不活躍時,碼-相位組合法的觀測噪聲主要來源于偽距觀測值,針對較小周跳探測時,探測結果往往會失敗,主要是由于小的周跳會淹沒在偽距噪聲中。同樣的,采用新方法時也需要對觀測噪聲特性進行分析。
在t時刻,GPS的偽距、載波相位和多普勒的觀測方程分別為
Pi(t)=ρ(t)+c(dt(t)-dT(t))+Ii(t)+
T(t)+εPi(t),
(1)
φi(t)=ρ(t)+c(dt(t)-dT(t))-Ii(t)+
λi·N(t)+T(t)+εφi(t),
(2)

(3)

通常,在某一歷元的觀測量噪聲可以用零均值白噪聲表示,因此假設:
εk~N(0,σk) ,
(4)
式中,σk表示觀測量的噪聲標準差。文獻[8]和[9]指出偽距觀測噪聲方差在0.11 ~0.35 m2之間,載波相位觀測噪聲方差要遠小于偽距觀測噪聲。由于多普勒觀測值的精度主要受多路徑與導航信號強度的影響,本文將利用文獻[9]中簡化隨機模型給出信噪比法實時估計多普勒觀測值的噪聲。
(5)
式中:S0為參考信噪比;σ0為信噪比最大時的標準差;a為放大系數。在中國香港CORS網不同站點(HKKT、HKMW、HKNP、HKST、HKOH、HKPC等多個采用徠卡接收機的站點),獲取50組觀測數據,數據的采樣時間為1 h,采樣間隔為1 s,截止高度角設置10°。將每組多普勒觀測值進行多項式擬合,獲得其觀測值誤差標準差,并計算每組觀測值對應信噪比的均值,其中部分觀測值誤差如圖1所示。
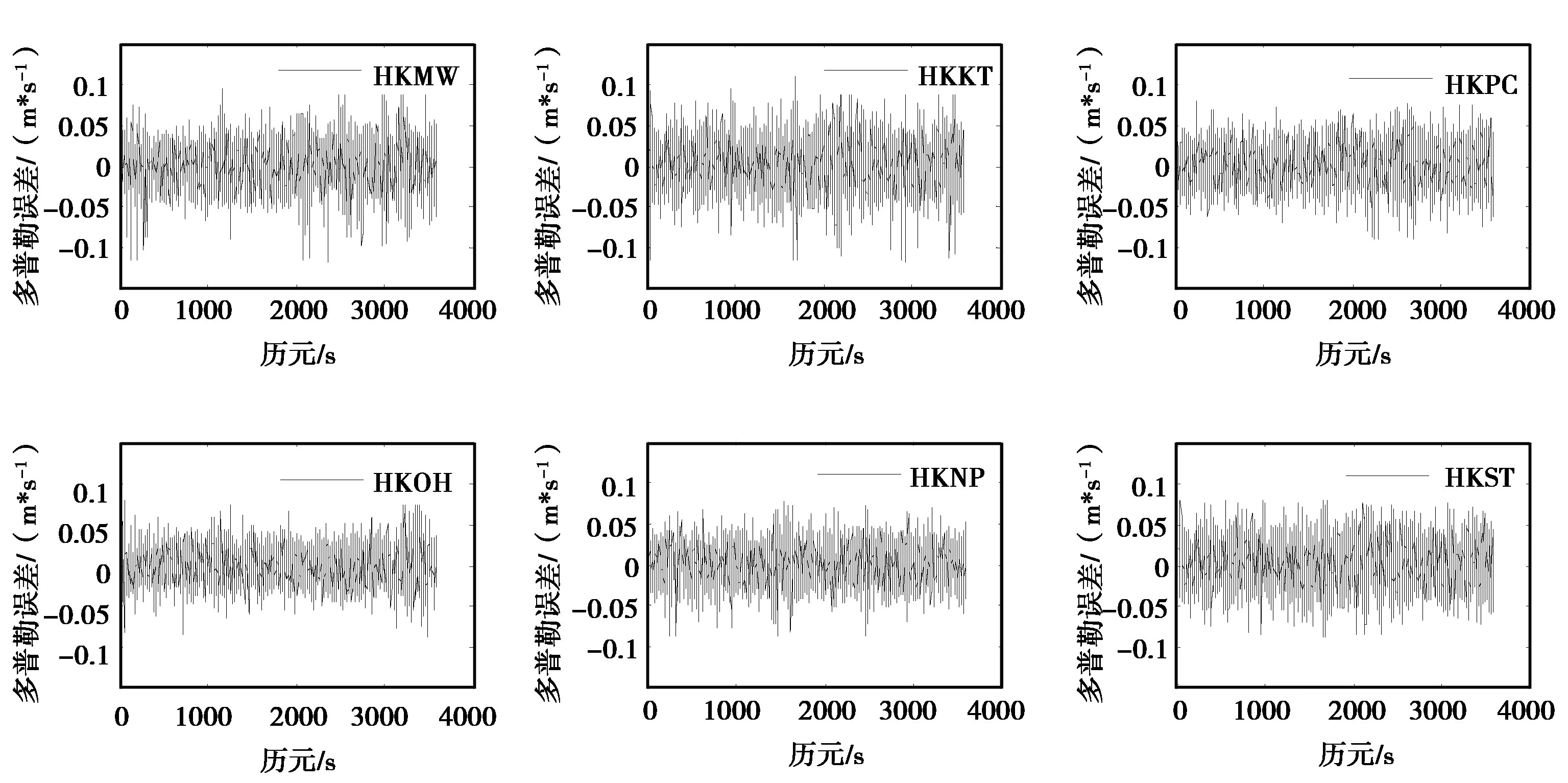
圖1 部分多普勒觀測值誤差
將50組觀測數據進行數理統計,并給出模型參數σ0=0.022 37 m,a=16,S0=9 m.觀測值誤差標準差與其對應的信噪比均值如圖2所示。
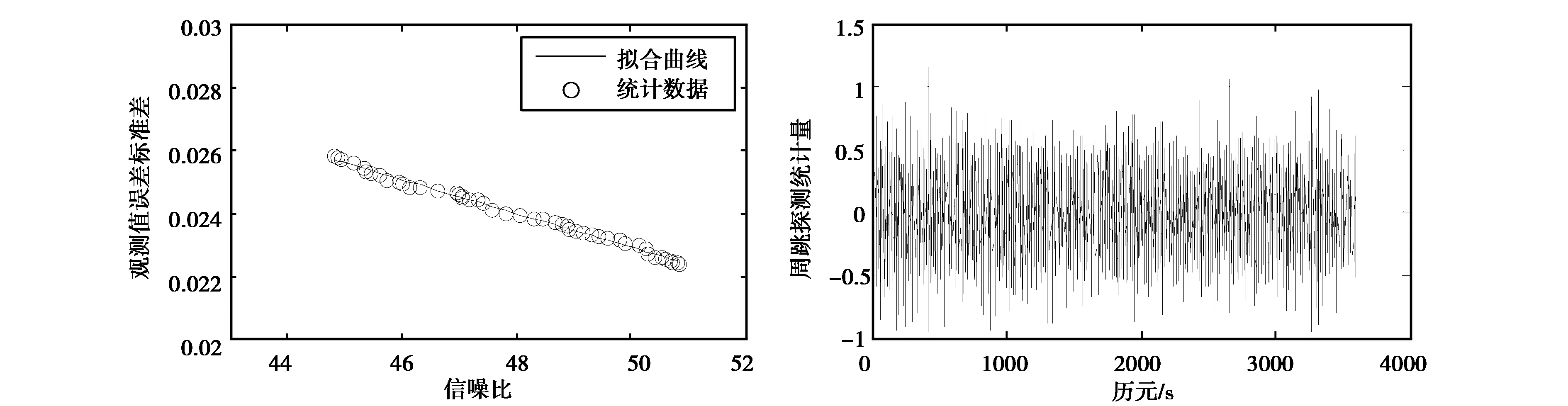
圖2 多普勒觀測值誤差標準差與信噪比均值的關系 圖3 傳統碼-相位差分序列周跳探測曲線
2 基于多普勒-載波相位差分序列的周跳探測方法
在電離層延遲變化比較平穩的地區,傳統的單頻碼-相位組合方法的周跳探測性能主要取決于偽距觀測噪聲的大小,其探測曲線如圖3所示。由于偽距觀測值的精度比較差,一般會達到亞米級的精度,且GPS載波L1,L2的波長分別約為0.19 m和0.24 m,因此,使用該方法探測較小的周跳時(比如大小為1~2周的周跳),周跳一般會被淹沒在觀測量的噪聲當中而無法及時探測。因此為了保證周跳探測的準確性,可以采用精度更高的多普勒觀測值,并且預先對多普勒觀測量的噪聲水平做出估計。
2.1多普勒-載波相位差分序列的構造
在t-1和t連續兩個相連歷元,對式(3)求均值,對式(2)做差:
(6)
φi(t)-φi(t-1)=Δρ+cΔdt-cΔdT+
λi·ΔN-ΔIi+
ΔT+εφ,
(7)


(8)
則式(6)可以重新表示為

(9)
再對式(9)和式(7)做差,則:
Δγ(t,t-1)≡φi(t)-φi(t-1)-
(10)
2.2周跳探測的假設檢驗方法
當不存在周跳時,ΔN為零。則可以認為Δγ(t,t-1)服從零均值的正態分布:
(11)
(12)
則η服從零均值的標準正態分布,周跳發生會使得η的均值不再為零。問題是根據樣本值來判斷η=0還是η≠0.為此,提出兩個相互對立的假設
H0:η=η0=0和H1:η≠η0.

(13)
由式(13),Δγ(t,t-1)的方差σΔγ可以寫作連續兩個相鄰歷元之間的多普勒觀測噪聲方差的組合。由式(5),可以根據信噪比實時估計多普勒觀測值噪聲。
在實際應用中,用探測周跳效果來確定顯著性水平,接著根據這一顯著性水平來給出相應的拒絕域,并由拒絕域設定檢測門限κ,如果η≥κ則可以判斷此時存在周跳,否則判斷此時沒有產生周跳。
3 實驗分析
3.1徠卡接收機靜態數據驗證分析
2017年5月使用徠卡接收機在長沙國防科大1號院北區19棟樓頂采集一組GPS觀測數據,采樣時間為1 h,采樣間隔為1 s,截止高度角設置10°.
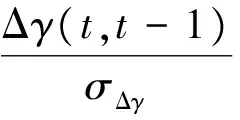
選取G03和G27 2顆在采樣時間內未發生周跳的衛星進行分析,2顆衛星的信噪比如圖4和圖5所示。利用式(5)中的簡化隨機模型實時估計多普勒觀測量的標準差,實時變化情況如圖6和圖7所示。
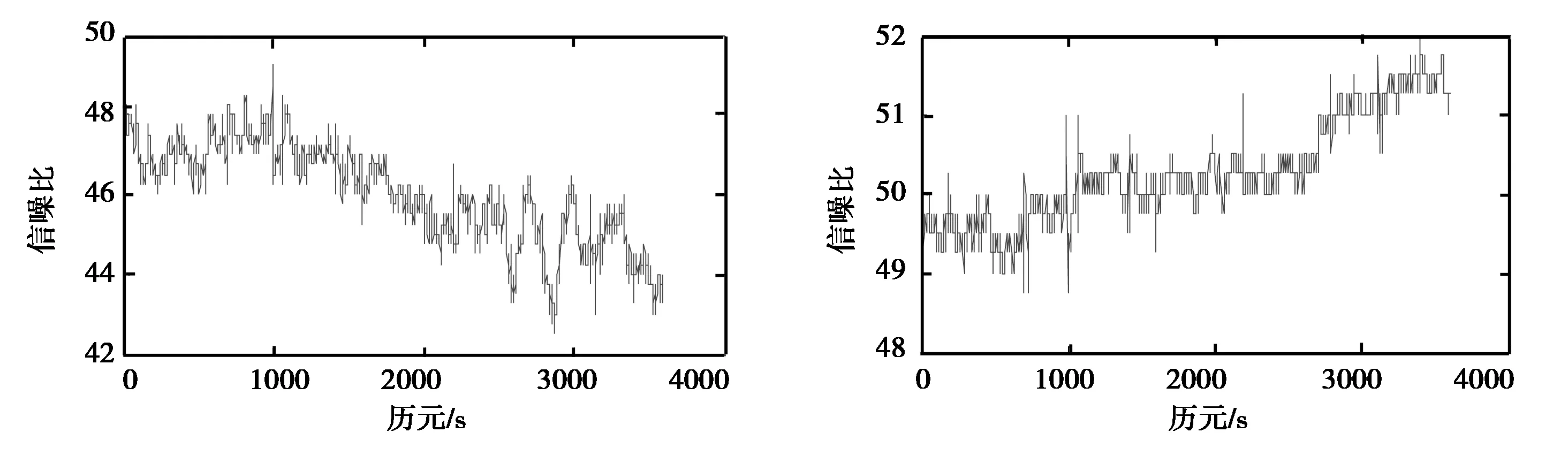
圖4 G03信噪比變化情況 圖5 G27信噪比變化情況
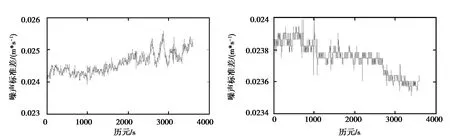
圖6 G03的多普勒觀測量噪聲標準差 圖7 G27的多普勒觀測量噪聲標準差
為了驗證本文提出的新方法,人為的在某些歷元的觀測值上加入一些小周跳,并利用傳統方法和本文提出的新方法分別進行探測。周跳探測方案如表1所示。

表1 周跳添加方案
利用傳統的方法和本文提出的新方法探測周跳,對這2種方法的探測效果進行分析,假定探測成功率為99.9%,則此時假設檢驗的顯著性水平為0.001,相應的檢測門限是標準正太分布的上側 0.001/2=0.000 5分位數,通過查閱正態分布表可以得到探測門限值為 3.31.兩種方法探測周跳的結果如圖8和圖9所示。
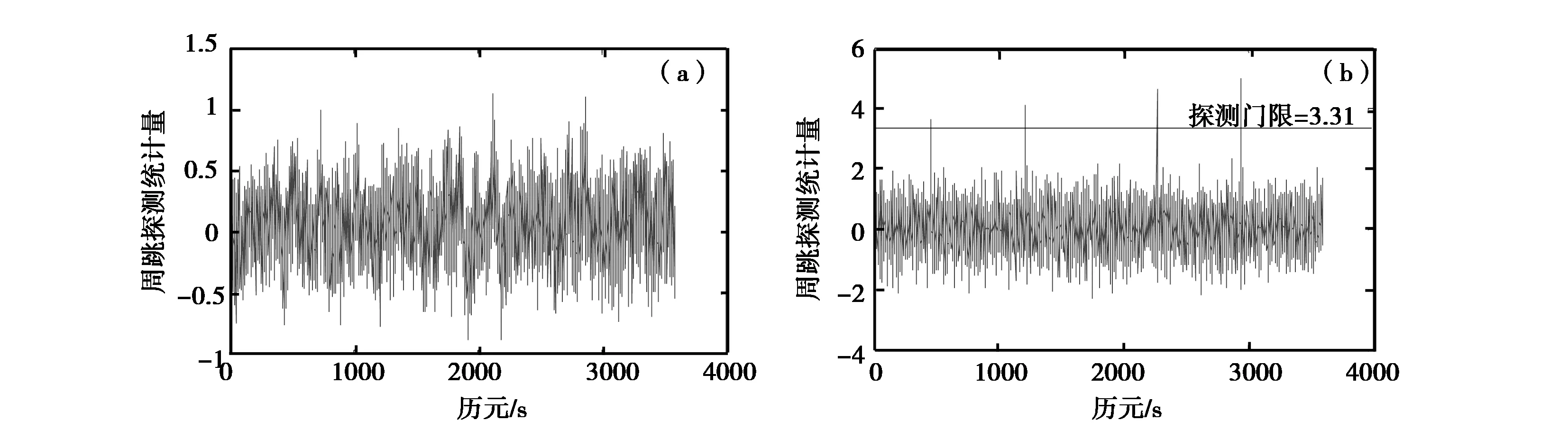
圖8 G03周跳檢測結果 (a)使用傳統方法的周跳探測曲線; (b) 使用新方法的周跳探測曲線
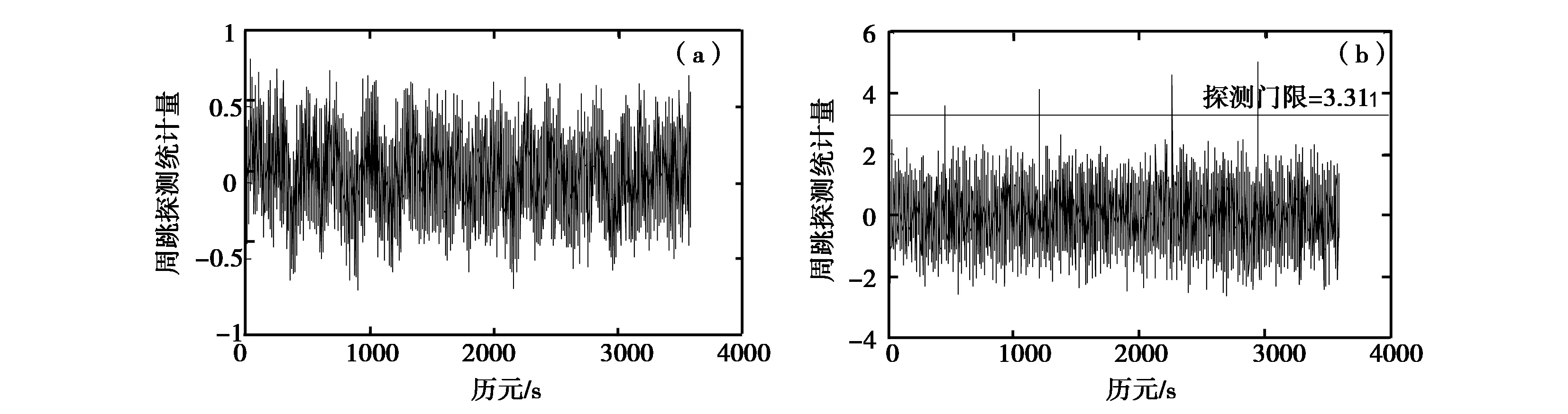
圖9 G27周跳檢測結果 (a) 使用傳統方法的周跳探測曲線; (b) 使用新方法的周跳探測曲線
由表1可見,人為加入的周跳值都比較小,從圖8和圖9可見,對應于發生在相應歷元上的小周跳,利用傳統的方法周跳淹沒在噪聲中,而利用新的方法進行周跳檢測時,檢測曲線在發生周跳的時刻都超過了門限,這說明在發生小的周跳時改進的周跳探測方法可以做出正確的判斷。
3.2U-blox接收機動態數據驗證分析
此數據來源于2017年7月使用U-blox M8T接收機在長沙開福區采集。采樣時間為30 min,采樣間隔為1 s,截止高度角為15°,使用RTKLib程序進行轉碼獲得。
選取衛星G03進行分析,該衛星的信噪比及實時估計多普勒觀測量的標準差如圖10和圖11所示。
為了更好驗證新的周跳探測算法的實用性,將實測數據進行周跳探測。兩種算法的探測結果如圖12所示。
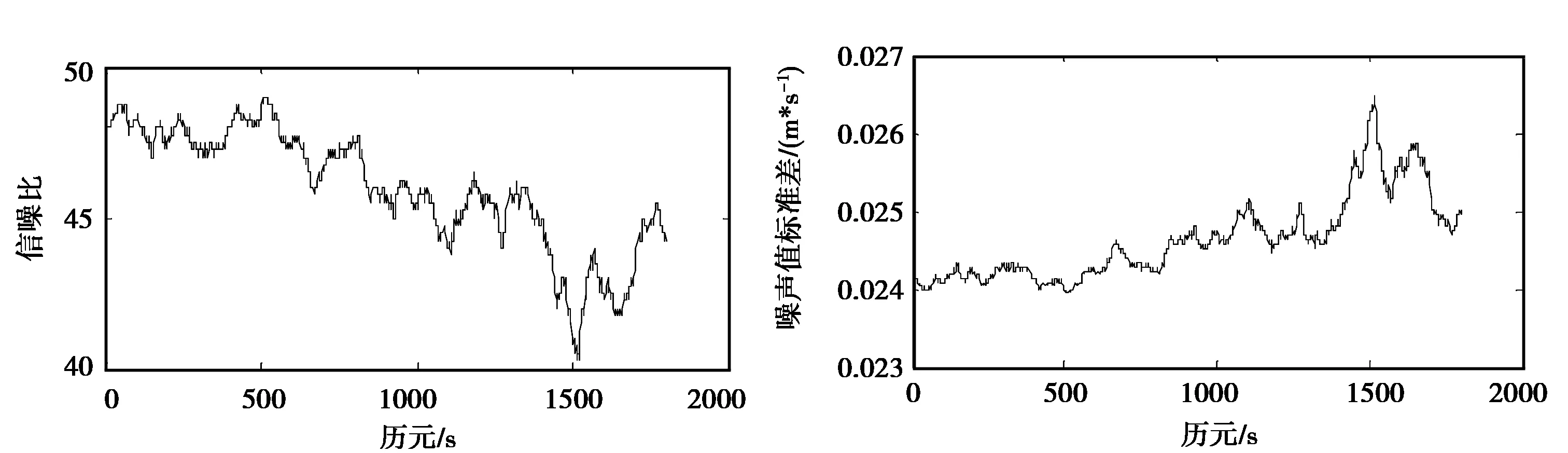
圖10 G03信噪比變化情況 圖11 G03的多普勒觀測量噪聲標準差
圖12 G03周跳檢測結果 (a) 使用傳統方法的周跳探測曲線; (b) 使用新方法的周跳探測曲線
由圖12可見,對于較大的周跳兩種算法都可以有效探測,但是圖12(a)中示出的探測結果在400歷元左右時探測失敗,圖12(b)中示出新的周跳探測算法可以正確的進行探測。因此,相對于傳統的方法而言,新的方法對于小周跳具有很好的探測效果,周跳探測新方法靈敏度比傳統碼-相位差分序列方法更高。
4 結束語
本文在傳統的偽距與載波相位組合周跳探測的方法上做出了改進,利用多普勒觀測量替換偽距觀測量,提出了一種新的周跳探測方法。新的周跳探測方法對實時的多普勒觀測噪聲做出了估計,在一定程度上削弱了觀測噪聲對周跳探測的影響。實測數據驗證表明:新的周跳探測方法相比于傳統的偽距與載波相位組合周跳探測方法,提高了周跳探測的靈敏度,可以更為準確的發現較小的周跳。由于該方法只需要使用單頻觀測量,因此是一種面向GPS單頻RTK的周跳探測算法。
致謝: 本課題由湖南省軍民融合項目資助,同時感謝中國香港CORS網提供的相關實驗數據。
[1] 李征航,張小紅.衛星導航定位新技術及高精度數據處理方法[M]. 武漢:武漢大學出版社, 2013.
[2] REALINI, E. GoGPS free and constrained relative kinematic positioning with low cost receivers[D]. Politecnico Di Milano,2009.
[3] 方榮新,施闖,魏娜,等.GPS數據質量控制中實時周跳探測研究[J].武漢大學學報(信息科學版), 2009,34(9): 1094-1097.
[4] 王愛生,歐吉坤.無幾何距離組合聯合MW組合探測周跳的改進算法[J].數據采集與處理, 2007,22(4): 468-474.
[5] 熊偉,伍岳,孫振冰,等.多頻數據組合在周跳探測和修復上的應用[J].武漢大學學報(信息科學版), 2007,32(4): 319-320.
[6] BISNATH S B.Efficient, automated cycle-slip correction of dual-frequency kinematic GPS date [C]//ION GPS-2000. Salt Lake City: Utah,2000.
[7] 劉柳,呂志偉,于曉東,等. GNSS周跳探測及產生周跳的影響因素研究[C]//第七屆中國衛星導航學術年會論文集——S05 精密定位技術,2016.
[8] 高書亮,黃智剛,李銳.適用于單頻GPS用戶的周跳探測方法[J]. 北京航空航天大學學報, 2011,37(8): 1021-1025.
[9] 柳響林.精密GPS動態定位的質量控制與隨機模型精化[D].武漢:武漢大學,2002.
ACycleSlipsDetectingAlgorithmforGPSSingleFrequencyRTK
JINXing1,2,WANGLing1,HUANGWende2
(1.CollegeofPhysicsandInformationScience,HunanNormalUniversity,Changsha410012,China;2.CollegeofMechanicalEngineeringandAutomation,NationalUniversityofDefenseTechnology,Changsha410073,China)
Aiming at the problem that the traditional code-carrier phase cycle detection method is applied to single frequency RTK, which is not sensitive to small cycle slips and is susceptible to observation noise, the thesis presents a single frequency cycle slip detection method with Doppler observations supporting. And this method combines two consecutive epochal Doppler observations with carrier phase difference observations to construct a Doppler-carrier phase difference sequence for real-time cycle slip detection. Then the hypothesis-test method is applied to detect whether there is a cycle slip in the single frequency carrier phase observations. Finally, the measured data shows that the method proposed in the thesis can accurately detect the small cycle slips in the single frequency carrier phase observation data, and the detection sensitivity of the method is higher than that of the traditional code-phase difference sequence method, which is suitable for single frequency RTK positioning technology.
Cycle slips detection; single frequency RTK; Doppler observation; difference sequence; hypothetic check
10.13442/j.gnss.1008-9268.2017.05.014
P228.4
A
1008-9268(2017)05-0068-06
2017-08-28
聯系人: 金星E-mail: jin102008@163.com
金星(1992-),男,碩士研究生,主要研究方向為GNSS高精度定位。
王玲(1962-),女,教授,博士生導師,主要研究方向為現代通信與網絡技術等。
黃文德(1981-),男,博士,講師,主要從事航天器軌道動力學及衛星導航系統技術研究。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56