PPP/INS組合系統研究進展與展望
2017-11-24 07:10:04王浩源孫付平肖凱
全球定位系統 2017年5期
王浩源,孫付平,肖凱
(1.信息工程大學 導航與空天目標工程學院,河南 鄭州 450001; 2.北斗導航應用技術協同創新中心,河南 鄭州 450001)
PPP/INS組合系統研究進展與展望
王浩源1,2,孫付平1,2,肖凱1,2
(1.信息工程大學 導航與空天目標工程學院,河南 鄭州 450001; 2.北斗導航應用技術協同創新中心,河南 鄭州 450001)
隨著GNSS多系統的建設,精密單點定位(PPP)技術向著實時固定解方向發展,PPP/INS組合系統因無需布設基準站,在導航測繪領域有著廣泛應用前景。本文系統總結了GNSS多系統、PPP模糊度固定、INS輔助對PPP/INS組合系統的貢獻,以及組合系統在濾波方法、平滑算法、隨機模型建立等方面的工作,并展望了PPP/INS組合系統的發展趨勢。
精密單點定位;慣性導航系統;組合系統;模糊度固定;濾波
0 引 言
全球衛星導航系統(GNSS)和慣性導航系統(INS)是現代導航定位的兩大主要手段,兩者融合互補,構成定位、測速、定姿一體化的GNSS/INS組合導航系統[1]。目前,在移動測圖系統、航空測量系統等導航測繪領域,普遍使用的是基于載波相位觀測值的DGNSS/INS(Difference GNSS)組合系統,具有快速高效獲取完整導航參數的優勢,工作原理是基于流動站與基準站之間的時空相關性,進行站星間雙差消除GNSS觀測誤差,這就限制了系統的作業范圍,同時需布置基準站增加了系統成本和復雜性[2]。
精密單點定位(PPP),使用單臺GNSS雙頻接收機的偽距和載波相位觀測量,利用國際GNSS服務組織(IGS)提供的精密軌道和鐘差產品,綜合考慮各種誤差的精確模型改正,進行單點絕對定位的技術。PPP技術集成了標準單點定位和相對定位的優點,具有作業靈活,不受作業距離限制等特點,可應用于大面積航空測量、海上測量以及不易架設基準站的偏遠地區[3]。但在城市峽谷、橋梁隧道等遮擋環境下,可見衛星的數量不能滿足定位要求,同時模糊度參數的初始收斂或信號中斷后的重新收斂時間較長,PPP定位的可靠性和穩定性受限。
PPP/INS組合系統可以有效彌補上述不足,一方面PPP可以克服DGNSS需要布設基準站的不足,擺脫基準站對作業范圍的限制,進一步拓展應用場景;另一方面INS可以克服PPP重新收斂時間較長的不足,充分利用INS短時精度高和導航參數完整的優勢,快速高效獲取導航測繪信息,在特定場合下能夠成為DGNSS/INS組合系統的替代選擇。
1 PPP/INS組合系統前期發展
在DGNSS/INS組合系統取得深入研究與廣泛應用后,不少學者相繼開展了PPP/INS組合系統的研究,表1示出了2010年以前PPP/INS組合系統的研究情況。從定位精度方面來看,PPP/INS組合基本能取得和DGNSS/INS組合相當的精度,因操作靈活,在難以布設基準站接收機的地方能夠成為替代選擇。PPP/INS組合的解算質量存在差異,與觀測環境和數據采集時長有關。當觀測環境良好時,PPP/INS松組合和緊組合精度相當;當觀測環境較差或出現GNSS信號短期中斷時,松組合定位精度將下降,與僅PPP相比基本沒有改進,而緊組合依然改善明顯,提供更魯棒的定位結果。在初始收斂段及GNSS信號中斷恢復后的重新收斂段,PPP/INS組合系統的定位精度仍不理想,因為在PPP處理中,是把模糊度作為浮點解進行估計,需要一定時間才能收斂到真值[4]。針對后處理應用,當觀測時間較長(大于4 h)時,可通過前后向平滑算法來提高收斂段精度,當觀測時間較短時,可通過多向濾波處理(即前向,后向,再前向,每次保留已收斂的濾波狀態)來改善收斂段的精度[5]。針對實時應用,需要發展適用于PPP的快速模糊度收斂技術。
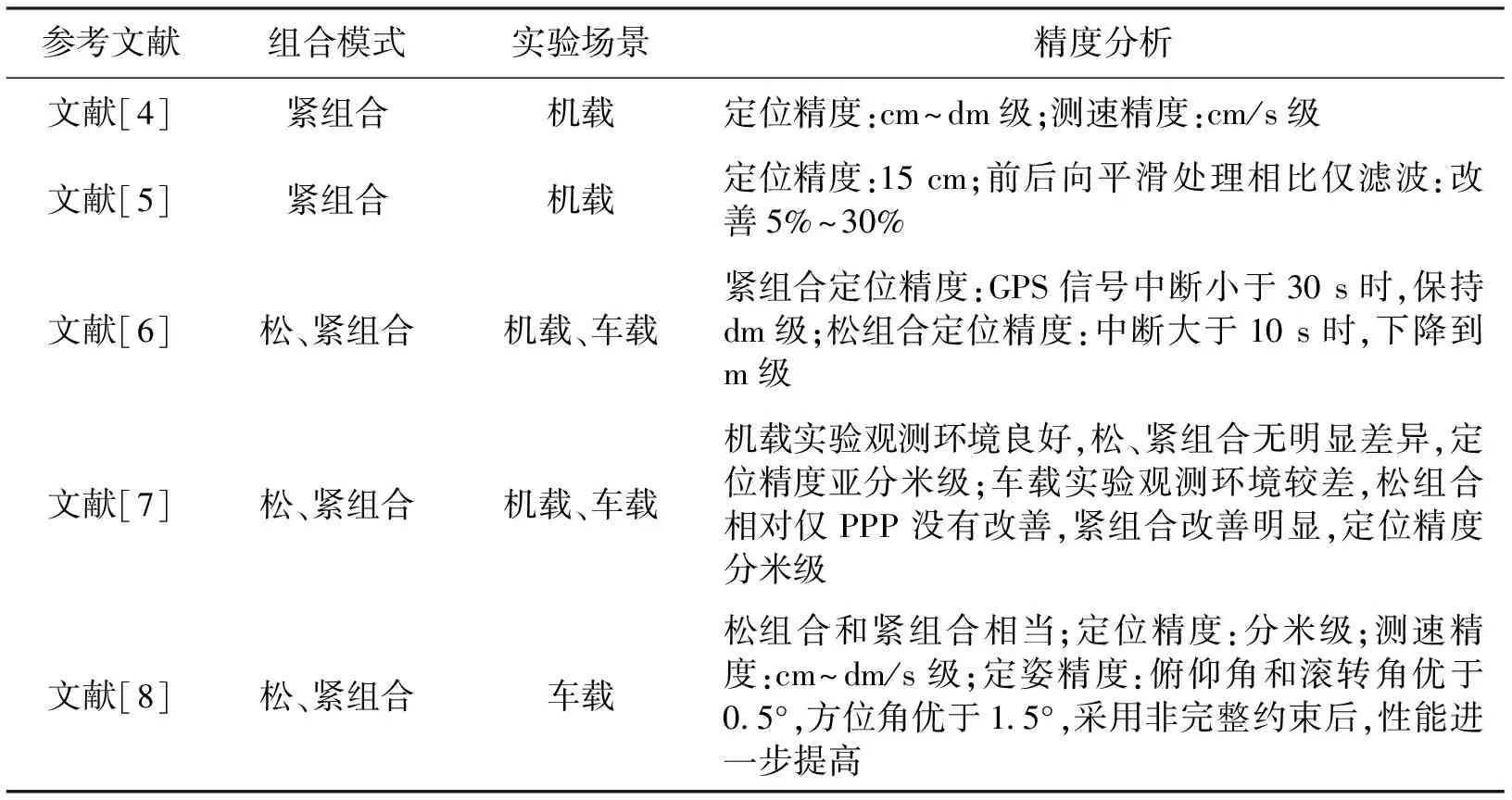
表1 2010年以前PPP/INS組合研究情況
在2010年以前的PPP/INS組合系統的研究中,都是基于GPS單系統和高精度INS的組合,需要良好的觀測環境才能取得較理想的精度,同時系統成本較高,限制了其發展與應用。隨著GNSS多系統、PPP模糊度固定技術、基于微機電傳感器(MEMS)的INS的發展,可用衛星數明顯增加、站星間空間幾何強度明顯改善、模糊度參數的收斂速度明顯提高、INS短時精度高的潛力被挖掘,近兩年,PPP/INS組合系統再次成為研究熱點。
2 PPP/INS組合系統研究進展
2.1GNSS多系統對PPP/INS組合的貢獻
PPP/INS組合系統的定位精度主要由PPP決定:一方面受可用衛星數和站星間空間幾何構型影響,可通過GNSS多系統有效解決;另一方面受偽距觀測質量和載波相位連續性的影響,與用戶觀測環境有關,難以控制[9]。目前,美國的GPS和俄羅斯的GLONASS具備完整星座,可提供全球覆蓋的完全運行能力;中國的BDS從2012底開始為亞太地區提供區域服務,目前正在全球組網;歐盟的GALILEO已完成了在軌驗證階段,在2016年底提供初始服務。目前,超過80顆GNSS衛星在軌運行,在開放條件下可同時使用超過20顆衛星進行定位、導航與授時(PNT)服務,相比之下,單GPS系統僅含32顆衛星,每個歷元的可用衛星至多有14顆,通常要更少。文獻[10]的研究表明,通過使用GNSS多系統數據,衛星的可用性、空間幾何強度及精度衰減因子將明顯改善,同時PPP在精度、可用性和連續性方面的性能也將明顯提升。文獻[11]對三系統(GPS+GLONASS+BDS)PPP和戰術級INS緊組合進行了研究,一組機載實驗結果顯示,相比僅GPS解,多系統PPP不僅使位置時間序列更加穩定,而且提供了更好的定位精度,在北、東、天三個方向上分別提高20%、50%和30%.同時,隨著衛星截止高度角從10°增加到35°,多系統PPP/INS組合在水平方向的位置精度幾乎沒有損失,結果還表明,GNSS多系統數據對PPP/INS組合的速度和姿態精度的影響有限,這主要取決于INS自身性能。文獻[12]對三星座(GPS+GLONASS+GALILEO)PPP和基于MEMS的慣性系統的緊組合進行了研究,對GNSS觀測量進行了非差和星間單差的無電離層線性組合處理,兩組跑車實驗結果表明,當GNSS測量更新可用時,可實現厘米到分米級的定位精度,與僅使用GPS相比,GLONASS和GALILEO的加入提高了定位精度,星間單差模式能獲得更好的定位精度;在GNSS短時中斷期間,定位精度會降到分米級,非差和星間單差模式精度相當。
2.2PPP模糊度固定對PPP/INS組合的貢獻
傳統的PPP/INS組合都是基于模糊度浮點解,這需要較長的收斂時間,且定位精度不可靠,與DGNSS/INS組合穩定的厘米級定位精度還有差距。PPP模糊度固定技術已被證明可以有效縮短收斂時間和提高定位精度,其關鍵在于處理觀測值中的偏差項,進而恢復模糊度的整數特性,PPP模糊度解算方法主要分為三種,即小數偏差法、整數相位鐘法和鐘差解耦法。目前,武漢大學提供基于小數偏差法的公開產品(ftp://gnss.sgg.whu.edu.cn/products),法國CNES中心提供基于整數相位鐘法的公開產品(ftp://cddis.gsfcnasa.gov/gnss/products),用戶可從服務端下載產品用于模糊度固定。文獻[13]推導了基于整數相位鐘法的模糊度固定解PPP/INS緊組合的觀測模型和系統模型,兩組跑車實驗結果表明,所提出的組合模型在模糊度首次固定后能達到穩定的厘米級定位精度,測速定姿性能也與DGNSS/INS組合相當,相比基于模糊度浮點解的組合,模糊度固定解PPP/INS組合具有更短的收斂時間,在GNSS短時間中斷后模糊度能實現快速重新收斂與重新固定。文獻[14]也對PPP和基于MEMS的INS緊組合進行了研究,模糊度固定方法基于進行了星間單差處理的整數相位鐘法,一組跑車實驗結果表明,組合系統可以實現厘米級定位精度,與傳統基于模糊度浮點解的PPP相比,統計收斂后的定位精度,在北、東、天三個分量上分別提高19.51%、61.11%和23.53%,通過執行模糊度固定,水平方向尤其是東向定位精度改善明顯。
2.3INS輔助對PPP/INS組合的貢獻
PPP的連續性和可用性在很大程度上受到觀測環境的限制,當可用衛星數低于4顆時,單獨PPP無法正常工作,此時集成INS的緊組合系統,依然能進行解算,INS輔助能提高PPP的定位性能,增加系統的魯棒性。在標準PPP算法中,卡爾曼濾波器的位置預測值由基于偽距計算的單點定位提供,而在PPP/INS緊組合系統中,INS可以為卡爾曼濾波器提供更準確的位置預測值,這將有助于整體導航性能的提升。
由于PPP中的主要觀測值是載波相位觀測量,通常由于高動態、信號遮擋或低衛星高度角而頻繁發生周跳,為了確保導航性能需進行探測和修復。常用的周跳探測方法有電離層殘差法、偽距載波相位組合法、多普勒法和TurboEdit法。目前大多數周跳探測方案都是為DGNSS或DGNSS/INS組合系統而設計的,需要至少兩臺GNSS接收機來實現觀測量差分,因此它們不適用于PPP或PPP/INS組合系統。INS具有短時精度高的優勢,可通過INS輔助進行周跳探測與修復,替代PPP中模糊度參數的重新初始化。文獻[15]通過慣性輔助,聯合使用寬巷相位和超寬巷相位組合來探測頻率L1和L2上的周跳,由于波長較長,在觀測量殘余誤差較大的情況下,也能提高周跳探測的魯棒性和效率,分別使用戰術級INS和基于MEMS的低成本INS進行實驗,兩種等級的INS都能以非常高的置信水平探測周跳。文獻[16]將慣性信息引入到寬巷相位組合觀測量中以避免來自偽距的高噪聲和多徑影響,構造慣性輔助的決策變量,相比傳統的MW組合精度更高,能有效的探測和修復小周跳(從1到6)和大周跳(從10到20)。文獻[17]提出聯合星間單差相位新息和星間單差電離層殘差修復周跳,為避免修復錯誤,對周跳修復量進行質量控制并設置多重修復準則,實現了瞬時重新收斂并獲得了更好的定位效果,并指出當GNSS信號中斷時長超出限值時不再進行修復。
3 PPP/INS組合中濾波方法、平滑算法、隨機模型
PPP/INS組合系統的關鍵技術是PPP與INS之間的信息融合,一是組合濾波模型的構建,要符合系統實際特性;二是后處理平滑算法的選取,能有效提高整體導航精度;三是隨機模型的建立,要充分考慮觀測環境的變化。
PPP/INS組合中常用的參數估計方法是擴展卡爾曼濾波(EKF),它是以誤差方差最小為估計準則,基于噪聲服從高斯分布的假設,狀態模型和觀測模型在近似的導航參數處通過一階泰勒級數展開進行線性化,由于忽略了高階項,在GNSS信號中斷期間,尤其是在使用基于MEMS的慣性系統時,可能導致解的發散。替代方案有無跡卡爾曼濾波(UKF)和粒子濾波(PF)。UKF是一種線性回歸估計濾波器,通過非線性狀態模型傳播加權sigma點來捕獲系統的后驗均值和協方差估計,但其仍基于高斯分布假設。PF避免了系統模型的線性化,是一種適用于非線性、非高斯系統的非參數估計方法,但由于需要大量的粒子來近似非線性模型,計算成本較高。文獻[18]通過融合UKF和PF形成UPF(Unscented Particle Filter)用于PPP/INS組合,可以顯著減少所需粒子數,同時保留系統噪聲的非高斯特性,通過與EKF、UKF、PF對比,當GNSS觀測更新可用時,性能相當,當存在GNSS中斷時,UPF可將定位精度提高15%。文獻[19]首先證明聯邦局部濾波器和自適應濾波器在形式上是等價的,然后基于自適應因子構建聯邦濾波器中的信息分配因子,提出的自適應聯邦濾波器可以獲得與集中式卡爾曼濾波器相當的解算精度,同時通過并行濾波計算提高了解算效率。
在GNSS信號完全中斷段,PPP/INS組合進入純慣導工作模式,導航誤差隨著時間不斷累積;GNSS信號恢復時,模糊度參數也需要較長的收斂時間才能達到真值。在對組合數據進行后處理時,通常使用平滑算法來提高整體導航性能,RTS(Rauch-Tung-Striebel)平滑算法在DGNSS/INS組合中取得了良好的效果,但并不能提高模糊度參數重新收斂段的性能,文獻[20]提出將前后向平滑算法應用于PPP/INS緊組合,跑車實驗結果表明該算法能夠提高GNSS信號完全遮擋段和重新收斂段的導航精度。
觀測噪聲協方差陣受觀測環境影響較大,對濾波器性能更敏感,文獻[14]考慮實際觀測環境(如多徑或不正常觀測)的影響,采用改進的Sage-Huge自適應算法構建最優協方差陣,在動態定位中能夠改善定位性能。文獻[9]為了削弱低質量的GNSS觀測量和不準確的狀態模型對GNSS多系統PPP/INS緊組合性能的影響,在算法實現中采用基于Helmert方差分量估計的自適應卡爾曼濾波,以削弱觀測中不合理的先驗協方差并補償不準確的狀態模型,可以使GNSS多系統PPP/INS組合解更魯棒。
4 PPP/INS組合系統展望
通過總結PPP/INS組合的研究進展,歸納出兩大發展趨勢:
一是向著實時方向發展,IGS組織實施了RTS(Real-Time Service)和MGEX(Multi-GNSS Experiment)兩大項目,旨在全球范圍內提供多頻多系統的高精度實時PPP服務,PPP朝著實時固定解的方向發展[21]。已有學者證明了非差非組合PPP模型具有更好的定位精度和收斂速度,隨著精密產品的改進,同時引入精確的先驗電離層約束或對流層約束,可以進一步提高PPP的性能,PPP/INS組合系統也將有著更廣闊的發展和應用前景。
二是向著低成本方向發展,隨著生產技術的發展,成本更低、性能更好的基于MEMS的INS將會出現;隨著GNSS多星座的快速發展,單頻用戶也能獲得很好的連續觀測效果;在非極端觀測條件下,松組合能獲得與緊組合相當的性能,而算法復雜性卻大大降低。以上這些都將推動PPP/INS組合走向實用,在消費級應用中也有很大的發展潛力。
隨著GNSS多系統的發展,帶來更多觀測量的同時也帶來了更多的狀態參數,如系統間偏差、頻間偏差等,如何有效估計這些偏差參數并提高解算效率值得深入研究;模糊度固定技術的可靠性還無法保證,有效的質量控制策略也有待進一步發展。
5 結束語
本文系統總結了PPP/INS組合系統的研究進展,介紹了前期的發展情況和近期的研究熱點,分別從GNSS多系統、PPP模糊度固定、INS輔助方面總結了三者對PPP/INS組合系統的貢獻,從濾波方法、平滑算法、隨機模型的建立方面總結了三者對PPP/INS組合系統性能的優化,最后展望了PPP/INS組合系統在實時化和低成本化方向的發展趨勢。不久的將來,PPP/INS組合系統有望走向成熟,在導航測繪領域得到更廣泛的應用,為國家“綜合PNT”體系[22]做出貢獻。
[1] 朱鋒. PPP/INS組合導航關鍵技術與算法實現[D]. 武漢:武漢大學, 2015.
[2] 劉帥.模糊度固定解PPP/INS緊組合理論與方法[D]. 鄭州:解放軍信息工程大學, 2016.
[3] 李盼. GNSS精密單點定位模糊度快速固定技術與方法研究[D]. 武漢:武漢大學, 2016.
[4] ZHANG Y, GAO Y. Integration of INS and un-differenced GPS measurements for precise position and attitude determination[J]. The Journal of Navigation, 2008, 61(1): 87-97.
[5] ROESLER, MARTELL H. Tightly coupled processing of precise point position (PPP) and INS data[C]//Proceedings of the 22nd International Meeting of the Satellite Division of the Institute of Navigation, Savannah, GA, USA. 2009: 1898-1905.
[6] SHIN E H, SCHERZINGER B. Inertially aided precise point positioning[C]//Proceedings of the 22nd International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2009), 2001: 1892-1897.
[7] KJ?RSVIK N S, GJEVESTAD J G O, BR?STE E,etal. Tightly coupled precise point positioning and inertial navigation systems[C]//International calibration and orientation workshop EuroCOW, 2010.
[8] DU S, GAO Y. Integration of PPP GPS and low cost IMU[C]//Canadian Geomatics Conference 2010. 2010.
[9] GAO Z Z, SHEN W, ZHANG H,etal. Application of Helmert variance component based adaptive Kalman filter in multi-GNSS PPP/INS tightly coupled integration[J]. Remote Sensing, 2016,8(7), 553.doi:10.3390/rs8070553.
[10] LI X X, GE M, DAI X,etal. Accuracy and reliability of multi-GNSS real-time precise positioning: GPS, GLONASS, BeiDou, and Galileo[J]. Journal of Geodesy, 2015 ,89(6): 607-635.
[11] GAO Z Z, SHEN W, ZHANG H,etal. Real-time kinematic positioning of INS tightly aided multi-GNSS ionospheric constrained PPP[J]. Scientific Reports, 2016(6): 30488.doi:1038/step30488.
[12] RABBOU M A, El-Rabbany A. Integration of multi-constellation GNSS precise point positioning and MEMS-based inertial systems using tightly coupled mechanization[J]. Positioning, 2015, 6(4): 81-95.
[13] LIU S, SUN F, ZHANG L,etal. Tight integration of ambiguity-fixed PPP and INS: model description and initial results[J]. GPS Solutions, 2016, 20(1): 39-49.
[14] HAN H, XU T H, WANG J. Tightly coupled integration of GPS ambiguity fixed precise point positioning and MEMS-INS through a troposphere-constrained adaptive kalman filter[J]. Sensors, 2016, 16(7): 1057.doi:10.3390/s16071057.
[15] DU S, GAO Y. Inertial aided cycle slip detection and identification for integrated PPP GPS and INS[J]. Sensors, 2012, 12(11): 14344-14362.
[16] LI Z, GAO J, WANG J. Inertial aided cycle slip detection and repair for PPP/INS tightly coupled navigation[J]. The Journal of Navigation, 2016, 69(6): 1357-1378.
[17] 劉帥,孫付平,張倫東,等. INS輔助周跳修復以實現精密單點定位瞬時重新收斂[J]. 中國慣性技術學報, 2015, 23(5):607-614.
[18] RABBOU M A, El-Rabbany A. Integration of GPS precise point positioning and MEMS-based INS using unscented particle filter[J]. Sensors, 2015, 15(4): 7228-7245.
[19] LI Z, GAO J, WANG J,etal. PPP/INS tightly coupled navigation using adaptive federated filter[J]. GPS Solutions, 2016, 1(21): 137-148.
[20] 劉帥,孫付平,李海峰,等. 前后向平滑算法在精密單點定位/INS緊組合數據后處理中的應用[J]. 中國慣性技術學報, 2015,23(1):85-91.
[21] 柴洪洲,王敏,穆敬,等. 邁向實時位置服務的精密單點定位技術[J]. 海洋測繪, 2013, 33(3):75-78.
[22] 楊元喜. 綜合PNT體系及其關鍵技術[J]. 測繪學報, 2016, 45(5):505-510.
ResearchProgressandProspectofPPP/INSIntegrationSystem
WANGHaoyuan1,2,SUNFuping1,2,XIAOKai1,2
(1.CollegeofNavigationandAerospaceEngineering,InformationEngineeringUniversity,Zhengzhou450001,China;2.BeidouNavigationTechnologyCollaborativeInformationCenter,Zhengzhou450001,China)
With the construction of GNSS multi-system, precise point positioning (PPP) technology is developing in the direction of real-time and ambiguity-fixed solution. The PPP/INS integration system has a wide application prospect in the navigation and surveying field, since the convenience of not laying base station. In this paper, the contributions of GNSS multi-system, PPP ambiguity fixing, INS-aided to the PPP/INS integration system are systematically summarized. And the progresses of filtering method, smoothing algorithm and stochastic model establishment in integration system are generalized. The development trend of the PPP/INS integration system is discussed.
Precise point positioning; inertial navigation system; integration system; ambiguity fixing; filtering
10.13442/j.gnss.1008-9268.2017.05.011
P228.4
A
1008-9268(2017)05-0053-06
2017-07-15
國家自然科學基金(批準號:41674042)
聯系人: 王浩源E-mail:2286737444@qq.com
王浩源(1993-),男,安徽阜陽人,碩士研究生,研究方向為精密單點定位與組合導航。
孫付平(1964-),男,河南長葛人,教授,博士生導師,研究方向為大地測量與組合導航。
肖凱(1989-),男,四川瀘州人,博士研究生,研究方向為衛星導航與組合導航。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19