基于梯度算法的電液伺服振動臺加速度諧波辨識
2017-11-22 08:20:55姚建均萬振帥牛慶濤張樂肖晨光
哈爾濱工程大學學報 2017年10期
關鍵詞:信號
姚建均,萬振帥,牛慶濤,張樂,肖晨光
(哈爾濱工程大學 機電工程學院,黑龍江 哈爾濱 150001)
基于梯度算法的電液伺服振動臺加速度諧波辨識
姚建均,萬振帥,牛慶濤,張樂,肖晨光
(哈爾濱工程大學 機電工程學院,黑龍江 哈爾濱 150001)
由于電液伺服振動臺中的非線性因素,當系統(tǒng)作正弦加速度振動試驗時,其響應信號中存在高次諧波,導致加速度信號失真。為了抑制諧波失真,準確辨識諧波信息,本文提出了基于遺忘因子梯度算法的諧波辨識方法。該方法由諧波發(fā)生器產(chǎn)生輸入向量,將加速度響應實際值與辨識得到的加速度信號值作差,并用于構(gòu)建準則函數(shù)。通過梯度算法不斷更新參數(shù)向量,當準則函數(shù)取得極小值時,利用參數(shù)向量便可計算各次諧波的幅值和相位,也可直接計算得到各次諧波。實驗結(jié)果表明:該諧波辨識方法具有良好的實時性和收斂性能,并具有較高的辨識精度。
電液伺服振動臺; 非線性; 諧波失真; 遺忘因子梯度算法; 諧波辨識; 準則函數(shù)
電液伺服振動臺具有響應速度快、控制精度高、控制方式靈活等優(yōu)點,使得其在航天、汽車、建筑等許多領域得到廣泛的應用。振動試驗是把試件固定在試驗臺上,通過模擬該試件受載時的情況,來研究載荷對試件的影響、試件的可靠性和抗震、減振與避振措施[1-2]。電液伺服振動臺主要由機械、液壓和電子3個子系統(tǒng)構(gòu)成,存在著諸如死區(qū)、摩擦、間隙等各種非線性。由于上述的非線性因素,當電液伺服振動臺作正弦振動激勵時,系統(tǒng)加速度響應會出現(xiàn)高次諧波,信號失真比較嚴重。這不僅降低了系統(tǒng)的動態(tài)跟蹤能力,也影響了系統(tǒng)的控制精度。
諧波辨識對于電液振動臺諧波抑制有著重要的指導作用,但是目前對于諧波辨識的研究主要集中在電力系統(tǒng)領域。為了對電力系統(tǒng)中的諧波進行檢測、抑制和補償,研究人員提出了很多方法。傅里葉變換是最常用的諧波檢測法,它需要一定時間的電流值,且需要進行兩次變換,計算量大,從而使得檢測時間較長,檢測結(jié)果的實時性較差,并且在采樣過程中,當信號頻率與采樣頻率不一致時,將產(chǎn)生頻譜泄漏和柵欄效應,使辨識出的幅值和相位不準確,尤其是相位的誤差很大,無法滿足辨識精度的要求[3]。小波分析作為時域分析的重要工具,克服了FFT在頻域完全局部化而在時域完全無局部化的缺點,對含有諧波的信號進行正交小波分解,利用多分辨率的概念,將高尺度上的結(jié)果看作不含諧波的基波分量。但算法需要軟件實現(xiàn),計算量大,實時性難以保證,且辨識精度比較低。人工神經(jīng)網(wǎng)絡算法原理簡單,實現(xiàn)方便,具有自適應性,可以實時的跟蹤信號,但需知道相位初值,且需訓練樣本;隨著測量范圍的增加,樣本和網(wǎng)絡規(guī)模隨之增加。近年來,一些智能優(yōu)化算法如遺傳算法、模擬退火算法、粒子群算法和蟻群算法被應用到了諧波辨識領域,但這些算法的收斂速度受初始參數(shù)的影響,并且計算量比較大,因此未能廣泛應用[4-7]。
電液伺服振動臺諧波辨識與電力系統(tǒng)諧波辨識不同的是,前者要求具有良好的實時性能、計算量小、辨識精度高。梯度下降法是一種最優(yōu)化算法,它是求解無約束優(yōu)化問題最簡單的方法之一。本文采用梯度算法,設計電液伺服振動臺諧波辨識策略,并用試驗驗證其有效性。
1 電液伺服振動臺
試驗用的電液伺服振動臺為單自由度振動臺,其控制系統(tǒng)如圖1所示,基本控制策略為三狀態(tài)(位移、速度和加速度)控制器[8]。輸入信號經(jīng)過濾波器獲得三輸入狀態(tài),利用加速度傳感器和位移傳感器獲得振動臺的加速度和位移,經(jīng)速度調(diào)理后獲得速度,由此獲得三狀態(tài)反饋。經(jīng)過調(diào)理電路放大和濾波處理后的三狀態(tài)反饋通過A/D轉(zhuǎn)換器與三輸入狀態(tài)在控制器的作用下,產(chǎn)生偏差信號u。偏差信號u經(jīng)D/A轉(zhuǎn)換器后經(jīng)過伺服控制電路產(chǎn)生伺服控制信號。控制信號通過控制伺服閥的往復運動使高壓油交替進入激振器的油腔,利用油壓推動活塞運動,從而帶動振動臺臺面運動,以實現(xiàn)期望加速度信號。該振動臺的主要技術(shù)指標如表1所示。
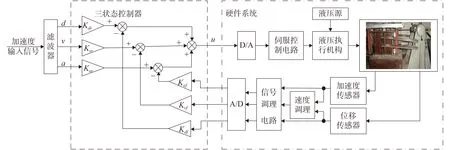
圖1 電液伺服振動臺控制系統(tǒng)Fig.1 The control system of the electro-hydraulic servo shaking table
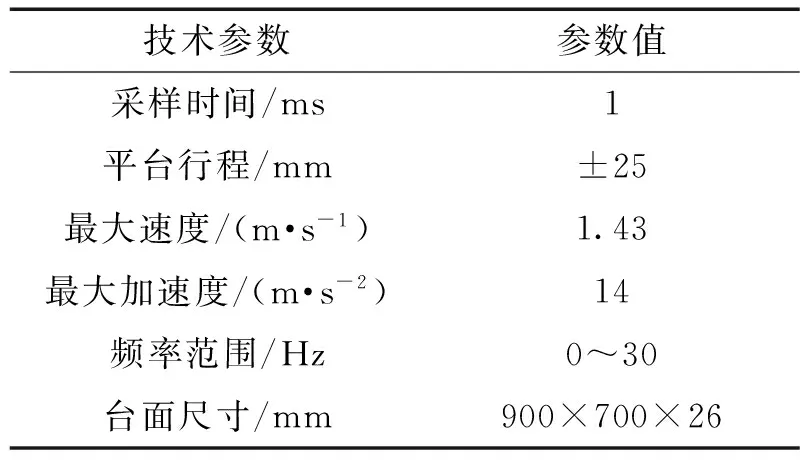
技術(shù)參數(shù)參數(shù)值采樣時間/ms1平臺行程/mm±25最大速度/(m·s-1)1.43最大加速度/(m·s-2)14頻率范圍/Hz0~30臺面尺寸/mm900×700×26
2 正弦振動試驗
正弦振動試驗是力學試驗中經(jīng)常被采用的一種試驗方法,也是最基本的振動試驗方法,可以模擬周期振動。對圖1所示的振動臺系統(tǒng),當輸入的正弦加速度信號為4sin(10πt)m/s2時,其時域響應如圖2所示,從圖中可以看出,由于系統(tǒng)的非線性因素,導致加速度響應信號嚴重失真。對應的頻域響應如圖3所示,從圖中可以看出加速度響應信號存在高次諧波現(xiàn)象。FFT(fast Fourier transformation)離線辨識的基頻響應和各次諧波的幅值分別為4.002,0.418,0.368,0.209,0.576,0.375 m·s-2。高次諧波的幅值中五次諧波最大,四次諧波最小,三次諧波和六次諧波相差不大。
對于電液伺服振動臺的正弦振動試驗,往往用總的諧波失真度(total harmonic distortion, THD)來衡量信號失真程度。諧波失真度是各次諧波的幅值相對基頻響應幅值而言,其值越低則諧波分量越少,諧波失真程度越小,振動臺復現(xiàn)信號的能力就越強。其計算表達式為
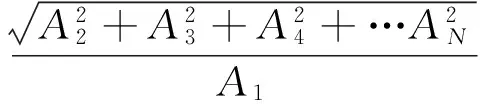
(1)
式中:A1為基頻響應幅值,A2、A3、…AN為各次諧波幅值,N為總的諧波的次數(shù)。利用式(1)計算THD 值為22.71%,失真程度比較嚴重。

圖2 時域響應Fig.2 The response in the domain

圖3 頻域響應Fig.3 The frequency spectrum
3 梯度算法
時不變單輸入單輸出系統(tǒng)用差分方程描述為
y(k)+a1y(k-1)+…+any(k-n)=
b1u(k-1)+…bmu(k-m)
(2)
式中:y、u為系統(tǒng)輸出、輸入量,m、n為系統(tǒng)階次。
記
(3)
θ(k)=[a1a2…anb1b2…bm]T
(4)
則可得到
y(k)=hT(k)θ(k)
(5)
(6)

梯度校正參數(shù)辨識方法的遞推形式為

(7)


(8)
則式(7)改為
(9)
權(quán)矩陣的選擇很重要,且輸入數(shù)據(jù)向量h(k)的各分量h(k)將直接影響參數(shù)的估計值。權(quán)矩陣取:

(10)
此時梯度辨識算法的遞推式變?yōu)?/p>
(11)
雖然梯度辨識算法的計算量比較小,參數(shù)估計是一致收斂的,但收斂速度很慢。為了加快隨機梯度算法的收斂速度,引入遺忘因子λ。帶遺忘因子隨機梯度辨識算法的遞推公式變?yōu)閇9-10]
(12)
r(k+1)=λr(k)+hT(k)h(k)
(13)
式中:0≤λ≤1,r(0)=1。
4 諧波辨識策略
由頻域響應的分析結(jié)果可知,振動臺正弦振動試驗的加速度響應中高次諧波的頻率均為基頻的整數(shù)倍。采樣得到加速度響應是一個離散信號,且是各次諧波線性疊加的結(jié)果[11],故k時刻的加速度響應可以表示為
φi)
(14)
式中:ω為輸入信號的圓頻率,φi為第i次諧波的相角。
為了能夠應用梯度算法辨識諧波,式(14)變?yōu)?/p>

(15)
令xi1=Aicosφi,xi2=Aisinφi。根據(jù)梯度算法的模型結(jié)構(gòu),構(gòu)造諧波向量h(k)和參數(shù)向量θ(k)
h(k)=[sin (ωk)cos (ωk)…sin (iωk)
cos (iωk)…sin(Nωk) cos (Nωk)]T
(16)
θ(k)=[x11x12x21x22…xN1xN2]T
(17)
則第i次諧波的幅值和相位可計算為
(18)


(19)


圖4 加速度諧波辨識方框圖Fig.4 Block diagram of the acceleration harmonic identification
5 諧波辨識實驗分析
利用圖4的加速度諧波辨識原理圖辨識圖2所示的加速度響應信號中的各次諧波。為了加快收斂速度,當前1 000次采樣時λ取0.8,之后λ取0.99。幅值和相位的辨識過程如圖5、6所示,從圖中可以看出幅值和相位經(jīng)過短暫波動后,迅速收斂于穩(wěn)定狀態(tài)。由于基頻在各次諧波中占主導地位,基頻響應的收斂速度明顯快于其他諧波。表3是各次諧波達到穩(wěn)定狀態(tài)后的幅值和相位,穩(wěn)定后各次諧波的幅值與表2中經(jīng)FFT分析得到的幅值非常接近,這說明梯度算法對諧波幅值的辨識精度比較高。
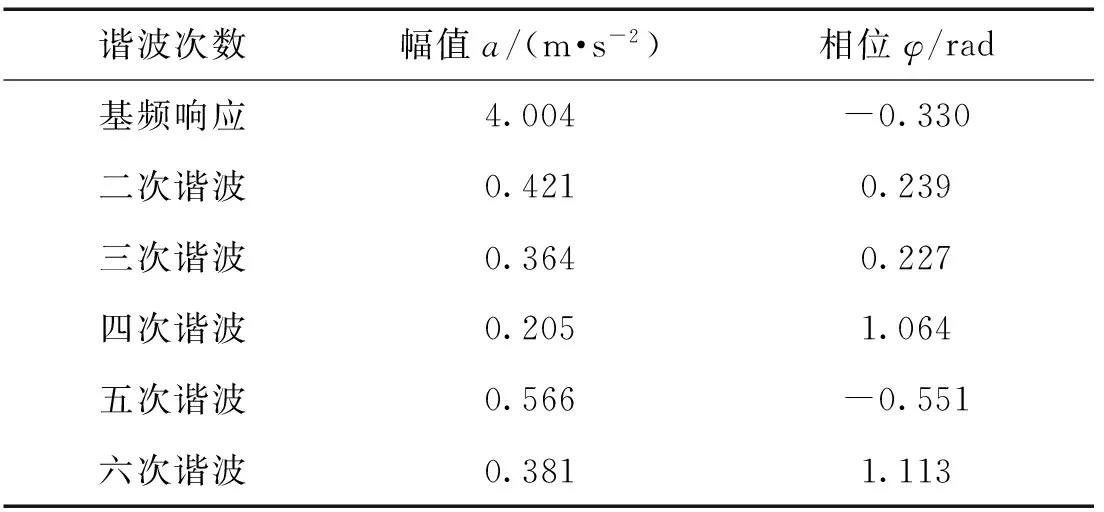
表3 辨識諧波的幅值和相位
辨識誤差如圖7所示,從圖中可以看出跟蹤誤差在算法起始階段衰減的比較快,在0.5 s內(nèi)就達到了收斂狀態(tài)。之后雖有波動,但波動幅度在±0.4 m/s2以內(nèi),這說明梯度算法對諧波幅值和相位的辨識精度比較高。
由式(19)可以直接構(gòu)造出各次諧波,各次諧波的結(jié)果如圖8所示,從圖中可以看出算法開始階段高次諧波波動劇烈,但在0.4 s后趨于穩(wěn)定,辨識得到的各次諧波可以作為諧波抑制的依據(jù)。

圖5 各次諧波的幅值Fig.5 The identified each harmonic′s amplitude
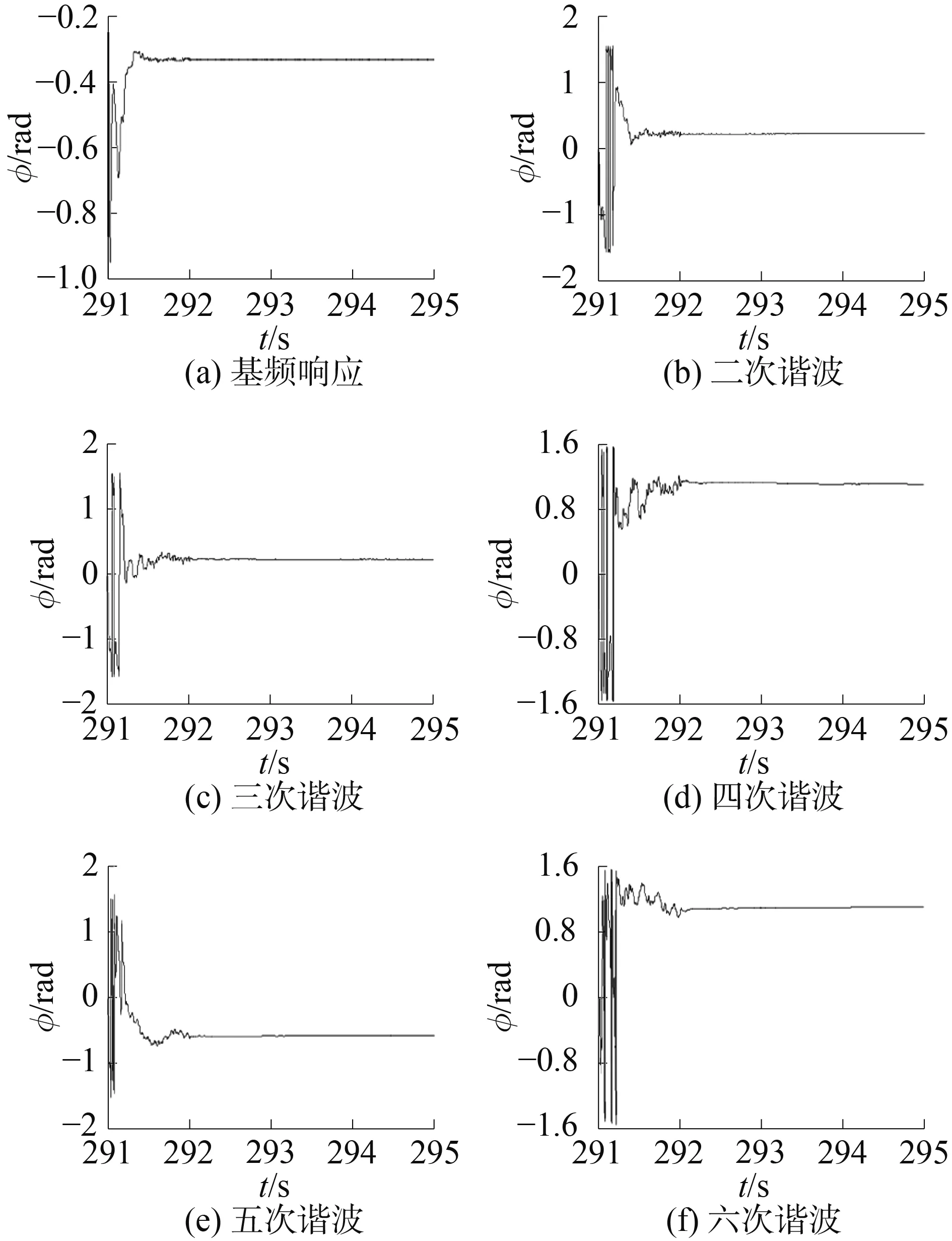
圖6 各次諧波的相位Fig.6 The identified each harmonic′s phase

圖7 辨識誤差Fig.7 Estimated error

圖8 各次諧波分量的波形Fig.8 The waveform of each harmonic component
6 結(jié)論
1)電液伺服振動臺是集機、電、液于一體的非線性系統(tǒng),在正弦信號激勵下,加速度響應由于系統(tǒng)的非線性因素存在波形失真。基于梯度算法的辨識模型,容易與振動臺原有控制策略結(jié)合,確保所有的操作都可以在計算機上實時運行。
2)該辨識算法不但能辨識各次諧波的幅值和相位,而且能直接得到各次諧波。辨識策略結(jié)構(gòu)簡單,辨識速度快,且具有很好的動態(tài)跟蹤能力,且無需知道系統(tǒng)的先驗知識。
3)為了加快收斂速度,引入了遺忘因子λ的概念。λ越小,算法收斂速度越快,但諧波參數(shù)波動大;λ越大,雖然參數(shù)估計平穩(wěn),但算法的跟蹤速度較慢。故一般在算法開始階段選擇較小的λ值,之后再選擇較大的λ值,既可提高算法的收斂速度,又可減小諧波參數(shù)的波動,從而提高辨識的精度。
4)實驗結(jié)果與FFT分析結(jié)果進行了比較,但是FFT分析是離線多點計算得到,而所用的辨識算法是實時在線進行。辨識結(jié)果表明遺忘因子梯度算法的諧波辨識算法具有較快的收斂速度和較高的辨識精度,其得到的辨識結(jié)果可以作為電液伺服振動臺諧波抑制的依據(jù)。
[1] 趙勇. 液壓振動臺高精度正弦振動的控制策略研究[D]. 哈爾濱: 哈爾濱工業(yè)大學, 2009: 1-3.
ZHAO Yong. Control strategy of high accuracy sinusoidal vibration for the hydraulic shaking table[D]. Harbin: Harbin Institute of Technology, 2009: 1-3.
[2] SHEN Gang, LVG M, YEZ M, et al. Implementation of electrohydraulic shaking table controllers with a combined adaptive inverse control and minimal control synthesis algorithm [J]. Iet control theory & applications, 2011, 5(13): 1471-83.
[3] HABROUK M E, DARWISH M K. Design and implementation of a modified Fourier analysis harmonic current computation technique for power active filters using DSPs [J]. Electric power applications, 2001, 148(1): 21-28.
[4] 湯勝清,程小華. 一種基于多層前向神經(jīng)網(wǎng)絡的諧波檢測方法[J].中國電機工程學報,2006, 26(18): 90-94.
TANG Shengqing, CHENG xiaohua. A harmonic detection method based on themulti-layer forward neural network [J]. Proceedings of the CSEE, 2006, 26(18): 90-94.
[5] 李圣清, 朱英浩, 周又慶,等. 電網(wǎng)諧波檢測方法的綜述[J]. 高電壓技術(shù),2004, 30(3): 39-43.
LI Shenqing, ZHU Yinghao, ZHOU Youqing, et al, Review of power grid harmonic detection method[J]. High voltage technique, 2004, 30(3): 39-43.
[6] DASH P K, PANDA S K, MISHRA B, et al. Fast estimation of voltage and current phasors in power networks using an adaptive neural network [J]. IEEE transactions on power system, 1997, 12(4): 1491-1499.
[7] VENKADESAN A, RAMAN K S, CHANDRASEKARAN K, et al. Artificial neural network based harmonics estimator for a power electronics converter [J]. Indian journal of Saience & technology, 2016, 42 (9): 1-5.
[8] TAGAWA Y, KAJIWARA K. Controller development for the E-defense shaking table [J]. Proceedings of the institution of mechanical engineers Part I journal of systems & control engineering, 2007, 221: 171-181.
[9] 劉金琨,沈曉蓉,趙龍. 系統(tǒng)辨識理論及MATLAB仿真[M]. 北京:電子工業(yè)出版社, 2013: 45-55.
LIU Jinkun, SHEN Xiaorong, ZHAO Long. System identification theory and MATLAB simulation[M]. Beijing: Publishing House of Electronics Industry, 2013: 45-55.
[10] ZHANG Zhening, JIA Jie, DING Ruifeng. Hirarchical least squares based iterative parameter estimation algorithm for multivariable Box-Jenkins-like system using the auxiliary model [J]. Applied mathematical computation, 2012, 218(9): 5580-5587.
[11] DING Feng, CHEN Tao. Gradient based iterative algorithm for soling a class of matrix equations [J]. IEEE transactions on automatic control, 2005, 50(8): 1216-1221.
[12] YAO Jianjun, DI Duotao, JIANG Guilin, et al. Acceleration amplitude-phase regulation for electro-hydraulic servo shaking table based on LMS adaptive filtering algorithm [J]. International journal of control, 2010, 85(10): 1581-1592.
本文引用格式:姚建均,萬振帥,牛慶濤,等. 基于梯度算法的電液伺服振動臺加速度諧波辨識[J]. 哈爾濱工程大學學報, 2017, 38(10): 1568-1573.
YAO Jianjun, WAN Zhenshuai, NIU Qingtao, et al. Acceleration harmonic identification for an electro-hydraulic servo shaking table based on gradient algorithm[J]. Journal of Harbin Engineering University, 2017, 38(10): 1568-1573.
Accelerationharmonicidentificationforanelectro-hydraulicservoshakingtablebasedongradientalgorithm
YAO Jianjun, WAN Zhenshuai, NIU Qingtao, ZHANG Le, XIAO Chenguang
(College of Mechanical and Electrical Engineering, Harbin Engineering University, Harbin 150001, China)
Nonlinearities exist for an electro-hydraulic servo shaking table and may cause acceleration harmonic distortion when a sine acceleration excitation signal is inputted. To suppress harmonic distortion and accurately identify harmonic information, an identification method based on forgetting factor gradient algorithm (FFGA) was proposed. An input vector was generated by a harmonic generator. The difference between the actual acceleration and the estimated acceleration was used to build the criterion function. The FFGA was applied to update the parameter vector. The amplitudes and the phases of harmonics can be calculated by utilizing the parameter vector when the criterion function is minimized. Each harmonic can be directly decomposed from the parameter vector and the input vector. Experimental results show that the proposed harmonic identification method has good real-time performance and convergence performance, as well as high identification precision.
electro-hydraulic servo shaking table; nonlinearity; harmonic distortion; forgetting factor gradient algorithm; harmonic identification; criterion function
10.11990/jheu.201607044
http://www.cnki.net/kcms/detail/23.1390.U.20170816.1550.026.html
TP271.31
A
1006-7043(2017)10-1568-06
2016-07-18. < class="emphasis_bold">網(wǎng)絡出版日期
日期:2017-08-16.
國家自然科學基金項目(51375102);黑龍江省自然科學基金項目(QC2014C050);黑龍江省普通高等學校青年學術(shù)骨干支持計劃項目 (1253G020);留學人員科技活動項目.
姚建均(1980-),男,教授,博士生導師.
姚建均,E-mail:travisyao@126.com.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06