多微源配電線路對(duì)等控制策略研究?
2017-11-17 07:17:31原亞寧王春梅李怡萌
計(jì)算機(jī)與數(shù)字工程 2017年10期
關(guān)鍵詞:控制策略
王 茜 原亞寧 王春梅 李怡萌
(國(guó)網(wǎng)冀北電力有限公司技能培訓(xùn)中心 保定 071000)
多微源配電線路對(duì)等控制策略研究?
王 茜 原亞寧 王春梅 李怡萌
(國(guó)網(wǎng)冀北電力有限公司技能培訓(xùn)中心 保定 071000)
在含多微源的配電線路系統(tǒng)中,對(duì)等控制是使各微源有效協(xié)調(diào)、系統(tǒng)安全穩(wěn)定運(yùn)行的控制策略之一。在對(duì)等控制策略中,各微源均采用下垂控制方法。針對(duì)傳統(tǒng)的下垂控制存在輸出阻抗性質(zhì)與配電線路不符和線路阻抗不平衡影響功率合理分配的問(wèn)題,提出引入了線路阻抗壓降補(bǔ)償反饋的反下垂控制方法。在PSCAD/EMTDC平臺(tái)上搭建含有六個(gè)具體微源的配電線路系統(tǒng)進(jìn)行多種工況的仿真分析,仿真結(jié)果驗(yàn)證了所提控制方法的正確性并反映了對(duì)等控制策略在孤島/并網(wǎng)模式下的運(yùn)行機(jī)制及其特點(diǎn)。
配電線路;對(duì)等控制;反下垂控制;線路阻抗;功率分配
1 引言
配電線路的控制,是配電線路的關(guān)鍵技術(shù)之一,也是配電線路研究的基礎(chǔ)和重心[1~2]。有效協(xié)調(diào)的控制可使配電線路在各運(yùn)行模式下安全可靠運(yùn)行,并能保持系統(tǒng)的穩(wěn)定性[3~4]。根據(jù)整體控制策略的不同,目前主要分為對(duì)等控制、主從控制、基于多代理技術(shù)的控制和基于功率管理的控制四種。本文將要研究的是對(duì)等控制策略。
所謂對(duì)等控制,顧名思義,各微源(DG)不分主從,具有相同的控制地位[5]。每個(gè)微源都能依靠接入電網(wǎng)系統(tǒng)點(diǎn)的就地信息執(zhí)行控制,無(wú)需依賴(lài)通信設(shè)備。各微源通常采用下垂控制(droop control)方法,能自動(dòng)分擔(dān)負(fù)荷和能源的隨機(jī)波動(dòng),在配電線路運(yùn)行模式切換時(shí)也無(wú)需更換控制方法,實(shí)現(xiàn)“即插即用”的功能[6]。傳統(tǒng)的下垂控制方法,利用有功-頻率(P-f)特性曲線和無(wú)功-電壓(Q-V)特性曲線來(lái)模擬大電網(wǎng)中同步電機(jī)的外特性[7],讓微源根據(jù)各自的下垂曲線調(diào)整輸出電壓的幅值和頻率,從而實(shí)現(xiàn)功率的合理分配。對(duì)于多微源配電線路,傳統(tǒng)的下垂控制存在一定的不足,不能直接采用[8]。首先,傳統(tǒng)下垂特性是基于高壓輸電線路阻抗以感性為主的假設(shè)條件提出的,而配電線路中線路阻抗主要呈阻性[9]。另外,由于微源的位置具有分散性,線路阻抗存在差異,會(huì)產(chǎn)生不同壓降,從而影響功率的按容分配[10]。
本文采用適用于配電線路的反下垂控制作為對(duì)等控制策略的控制方法。該方法利用了線路阻抗呈阻性時(shí)有功-電壓(P-V)和無(wú)功-頻率(Q-f)的下垂特性,與傳統(tǒng)下垂控制十分類(lèi)似,易于實(shí)施,且具有損耗小、頻率變化小等優(yōu)勢(shì)。在反下垂控制的基礎(chǔ)上,通過(guò)引入線路阻抗壓降的補(bǔ)償反饋來(lái)修改逆變器的參考電壓,從而消除線路阻抗不平衡帶來(lái)的影響。并在PSCAD/EMTDC平臺(tái)上搭建具體的配電線路系統(tǒng),通過(guò)對(duì)各種工況的仿真分析,驗(yàn)證所提控制方法的有效性并研究對(duì)等控制策略的實(shí)現(xiàn)原理及其特點(diǎn)。
2 反下垂控制方法
2.1 反下垂控制原理
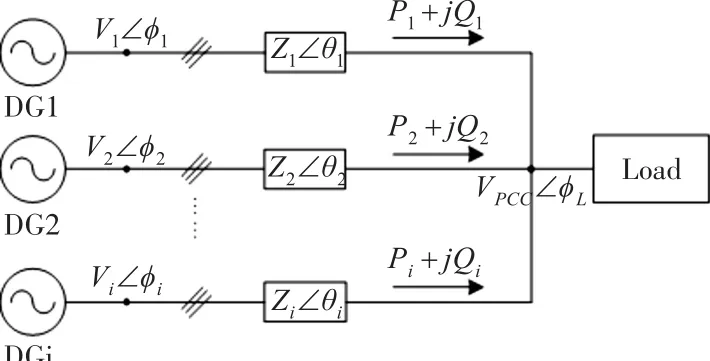
圖1 多微源并聯(lián)運(yùn)行等效電路圖
多微源并聯(lián)運(yùn)行等效電路如圖1所示,其中微源逆變器可等效為帶內(nèi)阻的電壓源,Vi和φi為逆變器輸出電壓的幅值和相角;將微源的等效輸出阻抗和微源與PCC點(diǎn)間的線路阻抗合并為等效阻抗Zi∠θi
[11];VPCC和 φL為PCC電壓的幅值和相角,它與逆變器輸出電壓的相位差為φ=φi-φL;Pi和Qi為各微源注入到PCC處的有功功率和無(wú)功功率,其表達(dá)式為
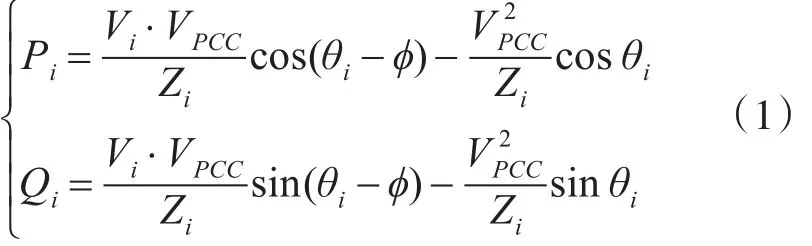
配電線路中線路阻抗主要呈阻性,即Zi≈Ri,θi=0°。相位差 φ通常較小,即有 sinφ≈φ,cosφ≈1的近似[12]。因此,式(1)可簡(jiǎn)化為如下
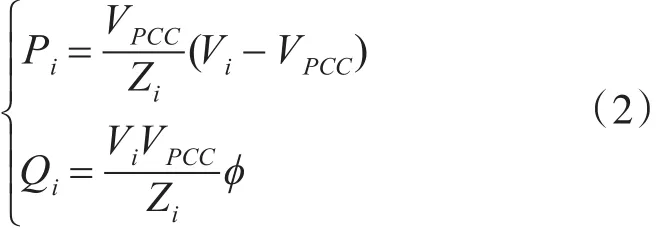
由式(2)的關(guān)系可知,微源可通過(guò)調(diào)節(jié)電壓幅值Vi來(lái)調(diào)節(jié)有功功率Pi,通過(guò)調(diào)節(jié)電壓相角φ來(lái)調(diào)節(jié)無(wú)功功率Qi,從而實(shí)現(xiàn)功率的解耦控制[13]。這種解耦控制方式與傳統(tǒng)的P-φ/Q-V下垂控制恰好相反,所以稱(chēng)為反下垂控制[14]。另外,由于相角φ不易于測(cè)量與控制,通常使用頻率 f來(lái)調(diào)節(jié)無(wú)功功率(因?yàn)?f=dφ/(2π?dt))。因此,反下垂控制方程可表示為式(3),其中 fi*、Vi*、Pi*和Q*i分別為微源的額定頻率、額定電壓幅值、額定有功和無(wú)功功率;kpi和kqi分別為有功-幅值下垂系數(shù)和無(wú)功-頻率下垂系數(shù)。
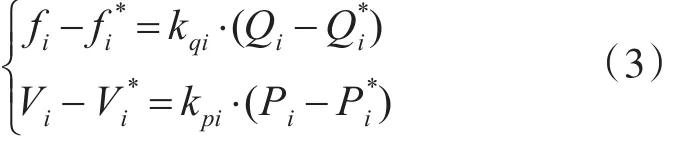
對(duì)于反下垂控制方程式(3),當(dāng)每個(gè)微源設(shè)定相同的 fi*、Vi*、kqi?Q*i值和 kpi?Pi*值時(shí),由于系統(tǒng)穩(wěn)定后各逆變器工作頻率 fi一致,所以有kqi?Qi=const,于是可實(shí)現(xiàn)式(4),即實(shí)現(xiàn)無(wú)功功率的按容分配:

但是由于微源到PCC的距離各不相同,即線路阻抗(用Rli+jXli表示)所產(chǎn)生的電壓降?V不平衡,所以系統(tǒng)穩(wěn)定后各逆變器的輸出電壓Vi不盡相同,導(dǎo)致有功功率無(wú)法實(shí)現(xiàn)精準(zhǔn)的按容分配[15]。為了解決這一問(wèn)題,需要對(duì)反下垂控制進(jìn)行改進(jìn),添加線路阻抗壓降的補(bǔ)償反饋環(huán)節(jié)。
2.2 反下垂控制器結(jié)構(gòu)
改進(jìn)后的反下垂控制框圖如圖2所示。就地采集各微源的輸出電壓、電流信號(hào)(uout,abc和iout,abc),計(jì)算得到實(shí)際輸出功率 Pi和 Qi,代入到反下垂控制方程式(3)中并引入線路阻抗壓降的補(bǔ)償反饋得到電壓和頻率的參考值,轉(zhuǎn)變?yōu)閷?duì)輸出電壓和工作頻率的控制。所以反下垂控制在本質(zhì)上也算是一種V f 控制[16]。
線路阻抗壓降的補(bǔ)償反饋環(huán)節(jié)中,通過(guò)PI控制器調(diào)節(jié)可得式(5),從而實(shí)現(xiàn)有功功率的按容分配,解決了線路阻抗不平衡帶來(lái)的有功功率分配問(wèn)題。
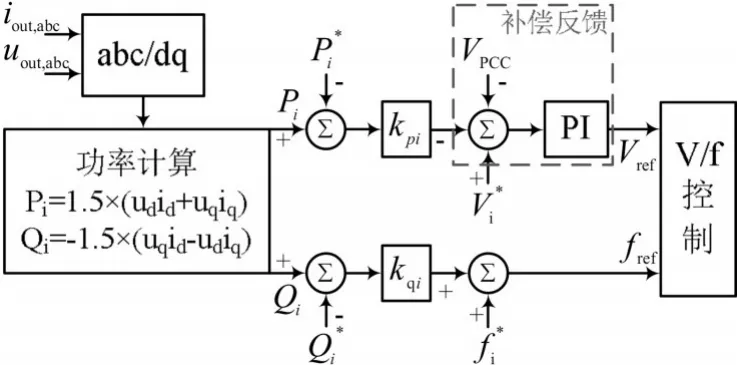
圖2 添加補(bǔ)償反饋的反下垂控制框圖

其中,VPCC并非就地可采集信號(hào),但它可以通過(guò)VPCC=Vi-?V求得。?V為線路阻抗所產(chǎn)生的電壓降,忽略其縱分量(PiXli-QiRli)/P*i(其值通常很小),可用其橫分量表示:

3 多微源微網(wǎng)系統(tǒng)參數(shù)
3.1 配電線路參數(shù)
對(duì)于配電線路控制策略的仿真研究,一般會(huì)用兩個(gè)逆變電源等效具體的微源,且逆變電源的容量通常選取相同值。這樣的仿真系統(tǒng)過(guò)于理想簡(jiǎn)單化,與實(shí)際不太相符。在實(shí)際的應(yīng)用中,配電線路系統(tǒng)包含多個(gè)種類(lèi)不同、容量各異的微源,微源之間的控制需要相互協(xié)調(diào)才能使系統(tǒng)整體運(yùn)行穩(wěn)定。所以本文搭建了一個(gè)含六個(gè)微源且容量各異的配電線路系統(tǒng)。系統(tǒng)中的各項(xiàng)參數(shù)見(jiàn)表1。
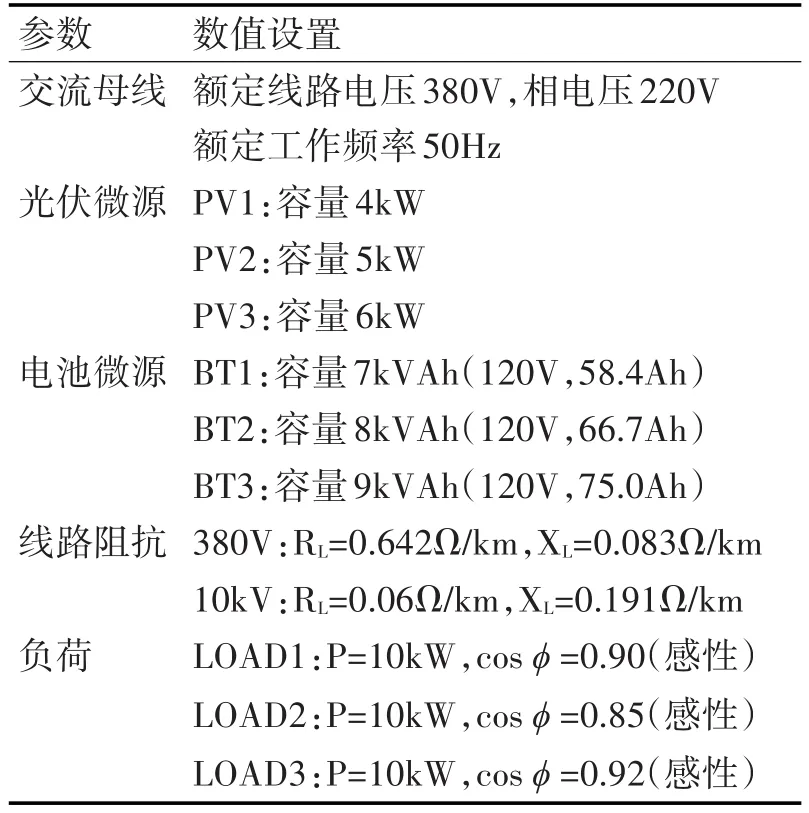
表1 配電線路系統(tǒng)模型參數(shù)
3.2 微源控制參數(shù)
本文選取了具有能源間歇性的光伏發(fā)電裝置和能源較為穩(wěn)定的蓄電池作為微源。各微源均采用雙級(jí)式并網(wǎng)方式,光伏電池連接的DC/DC變換器采用MPPT控制方法[17],蓄電池連接的DC/DC變換器采用恒壓控制方法[18]。又因?yàn)槲覀円芯康氖菍?duì)等控制策略,所以全部微源的DC/AC逆變器在孤島/并網(wǎng)運(yùn)行模式下均采用所提的反下垂控制方法。為了驗(yàn)證所提控制方法能夠解決線路阻抗不平衡帶來(lái)的功率分配問(wèn)題,各微源與PCC之間的線長(zhǎng)取不同值。反下垂控制所需設(shè)定的具體參數(shù)見(jiàn)表2。
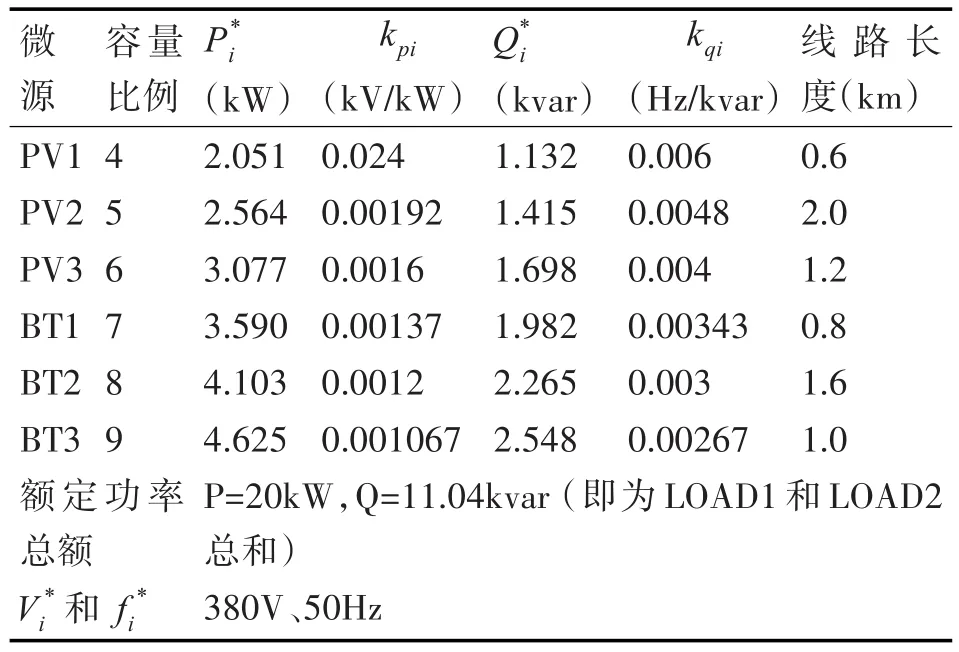
表2 各個(gè)微源的Droop控制設(shè)定參數(shù)
4 仿真與分析
在PSCAD/EMTDC平臺(tái)上搭建如圖4所示的多微源配電線路系統(tǒng),通過(guò)在多種工況下的仿真分析,驗(yàn)證所提反下垂控制方法的有效性并研究對(duì)等控制策略的實(shí)現(xiàn)原理和特點(diǎn)。仿真步長(zhǎng)為20μs。需要說(shuō)明的是,每種工況/條件下光伏微源所需承擔(dān)的負(fù)荷功率均未超過(guò)其最大輸出功率。
4.1 孤島模式下負(fù)荷變化的仿真
孤島模式下配電線路從大電網(wǎng)中斷離,配電線路獨(dú)立運(yùn)行,需由配電線路內(nèi)的微源跟蹤負(fù)荷的變化自動(dòng)參與輸出功率的分配,提供電壓和頻率的支撐。仿真過(guò)程如下:0~2s內(nèi)只有負(fù)荷LOAD1和LOAD2投入運(yùn)行,2s時(shí)添加負(fù)荷LOAD3,3s時(shí)切除負(fù)荷LOAD3,總仿真時(shí)長(zhǎng)為4s。仿真結(jié)果如圖3~圖5所示。
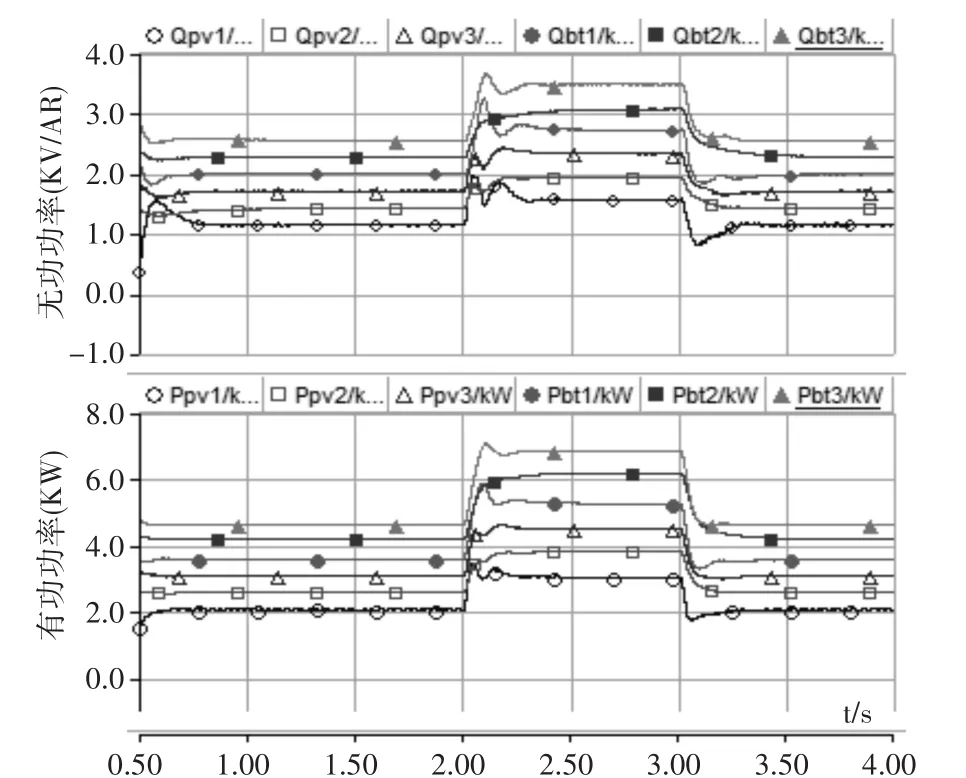
圖3 各微源輸出功率
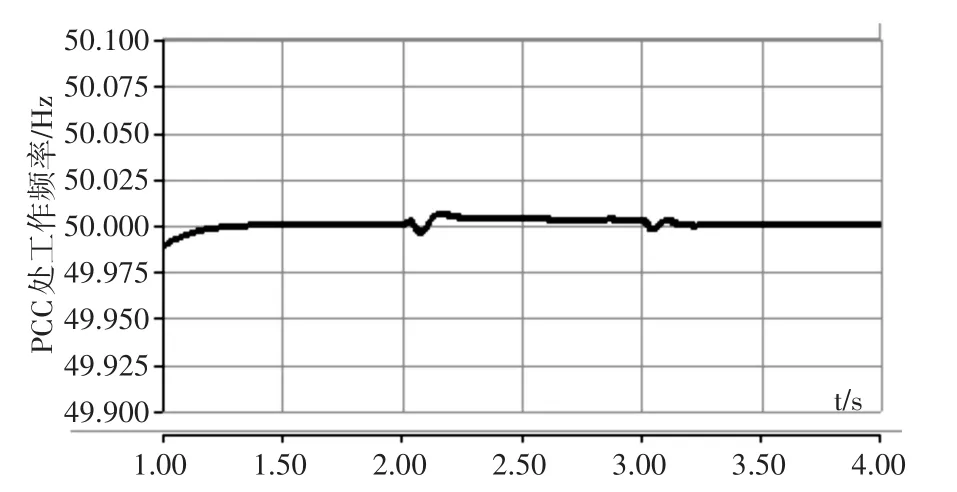
圖4 PCC處工作頻率
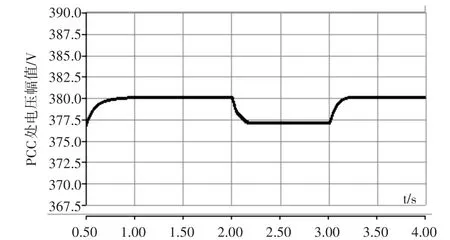
圖5 PCC處電壓幅值
如圖5所示,微源共同承擔(dān)負(fù)荷的變化,其有功功率和無(wú)功功率均能按所設(shè)定的容量比例4∶5∶6∶7∶8∶9輸出,不受線路長(zhǎng)度不平衡的影響。如圖5、圖6所示,頻率、電壓幅值與負(fù)荷功率之間的變化規(guī)律符合反下垂控制方程(式(3)),負(fù)荷功率增加時(shí)頻率有所上升而電壓幅值有所下降,負(fù)荷減少時(shí)情況相反。頻率和電壓幅值的變化范圍較小,滿足電能質(zhì)量的要求。仿真結(jié)果說(shuō)明了該反下垂控制方法的有效性,反映了孤島模式下對(duì)等控制策略能跟隨負(fù)荷變化自動(dòng)按容分配輸出功率且能穩(wěn)定控制電壓和頻率的特點(diǎn)。
4.2 孤島模式下微源退出的仿真
當(dāng)光伏微源受到外界因素影響無(wú)法正常工作時(shí)和蓄電池放電完全后,都需要從配電線路中退出以防影響整體運(yùn)行。研究該工況下對(duì)等控制策略的運(yùn)行情況即為以下仿真內(nèi)容。仿真過(guò)程如下:0~2s內(nèi)六個(gè)微源全部投入運(yùn)行,2s時(shí)蓄電池BT1微源退出,3s時(shí)光伏電池PV2微源退出,總仿真時(shí)長(zhǎng)為4s。仿真結(jié)果如圖6~圖8所示。
圖8可知,當(dāng)有微源退出時(shí),它本該承擔(dān)的功率部分會(huì)分?jǐn)偟绞S辔⒃瓷希S辔⒃窗丛O(shè)定容量比例重新分配輸出功率。由圖9、圖10可知頻率、電壓幅值與負(fù)荷功率之間的變化規(guī)律仍符合反下垂控制方程,頻率和電壓幅值的變化范圍仍滿足電能質(zhì)量的要求。仿真結(jié)果表明對(duì)等控制策略允許微源的中途退出而不影響整體的正常運(yùn)行。同理,微源的中途投入也不會(huì)影響對(duì)等控制的繼續(xù)運(yùn)行(涉及到同步處理技術(shù))。反映了對(duì)等控制策略具有“即插即用”的功能。
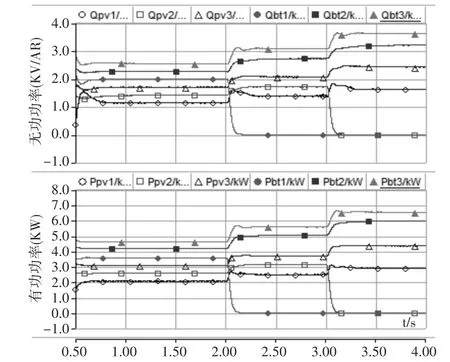
圖6 各微源輸出功率
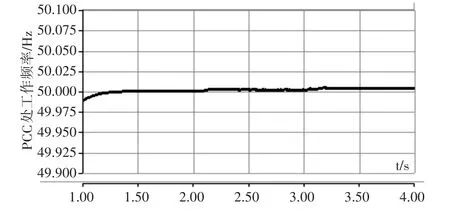
圖7 PCC處工作頻率
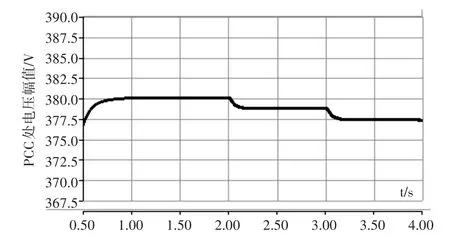
圖8 PCC處電壓幅值
4.3 并網(wǎng)模式下的仿真
并網(wǎng)模式下大電網(wǎng)提供電壓和頻率的支撐,承擔(dān)系統(tǒng)的功率變化;配電線路作為輔助單元,通過(guò)協(xié)調(diào)控制所轄微源滿足一定的供電需求。為了方便研究,此處將負(fù)荷變化、微源退出和光強(qiáng)變化放在同一并網(wǎng)仿真過(guò)程中:0~1s為并網(wǎng)前的預(yù)處理,1s時(shí)并網(wǎng)。0~2.5s內(nèi)光照強(qiáng)度為1000W/m2、負(fù)荷LOAD1和LOAD2投入運(yùn)行,2.5s時(shí)光照強(qiáng)度降低為800W/m2,3s時(shí)添加負(fù)荷LOAD3,4s時(shí)切除負(fù)荷LOAD3,4.5s時(shí)切除蓄電池BT1和光伏電池PV2,總仿真時(shí)長(zhǎng)為5.5s。仿真結(jié)果如圖9~圖10所示。
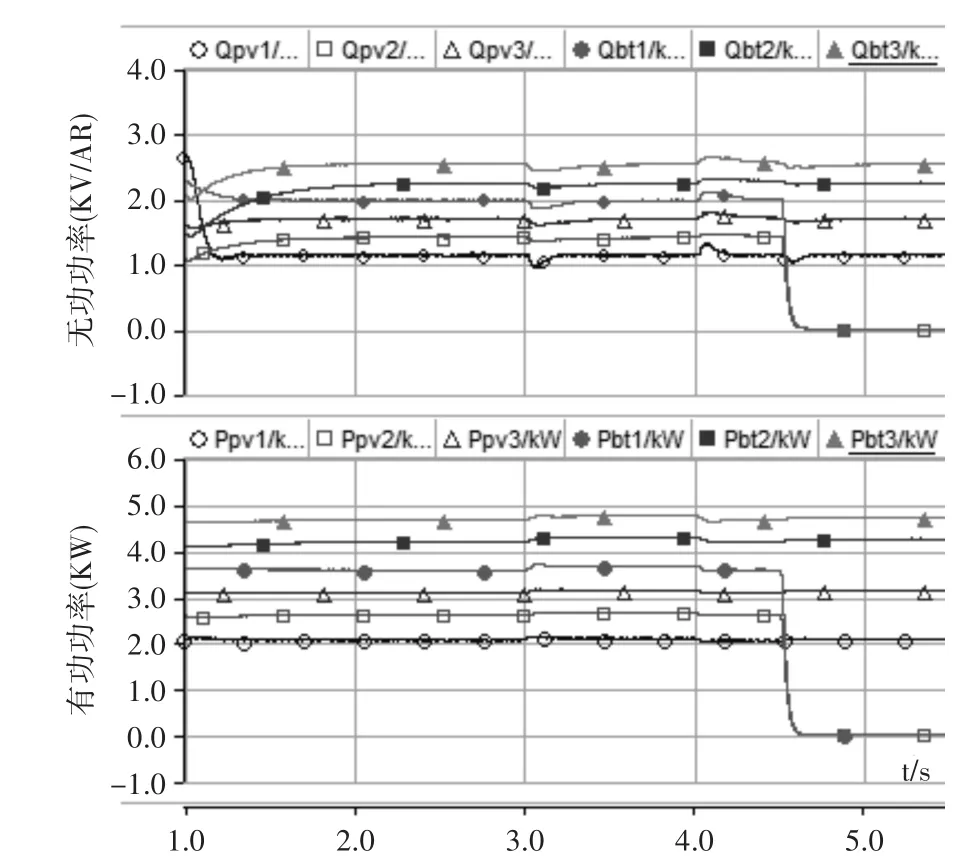
圖9 各微源輸出功率
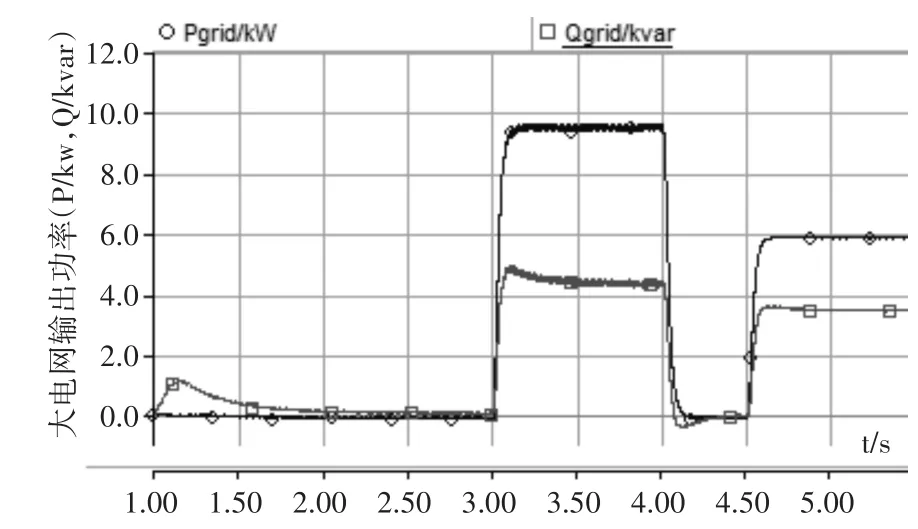
圖10 大電網(wǎng)輸出功率
圖11 結(jié)果表明,除了退出的微源輸出功率降為零外,其他微源在并網(wǎng)運(yùn)行模式下均工作在額定功率附近,不受光照強(qiáng)度和負(fù)荷變化的影響。圖12結(jié)果表明,當(dāng)配電線路輸出功率滿足負(fù)荷需求時(shí)大電網(wǎng)輸出功率為零,而負(fù)荷變化和微源退出引起的功率波動(dòng)均由大電網(wǎng)承擔(dān)。仿真結(jié)果表明對(duì)等控制策略在并網(wǎng)模式下能保證各微源的輸出功率按給定運(yùn)行計(jì)劃(設(shè)定的額定功率)進(jìn)行,分擔(dān)一定的功率輸出,超出計(jì)劃的部分才由大電網(wǎng)承擔(dān),減輕了大電網(wǎng)的功率負(fù)擔(dān)。
5 結(jié)語(yǔ)
采用引入了線路阻抗壓降補(bǔ)償反饋的反下垂控制方法,對(duì)等控制策略能在多微源配電線路系統(tǒng)中正常運(yùn)行:孤島模式下能跟隨負(fù)荷變化對(duì)輸出功率進(jìn)行按容分配,同時(shí)保證電壓和頻率的穩(wěn)定控制。并網(wǎng)模式下能保證各微源按計(jì)劃功率輸出,減輕大電網(wǎng)的功率負(fù)擔(dān)。對(duì)微源具有即插即用的優(yōu)點(diǎn),但也有能源利用率較低的缺點(diǎn)。反下垂控制是一種有差控制方法,仍需要二次及以上調(diào)壓調(diào)頻來(lái)實(shí)現(xiàn)電壓和頻率的穩(wěn)定,這是進(jìn)一步的研究任務(wù)。另外,還需要對(duì)該控制方法進(jìn)行改進(jìn)并加入蓄電池的充放電管理以提高能源的利用率。
[1]歐相林,鄧鶴鳴,王力農(nóng).10kV配電線路帶電作業(yè)安全綜合評(píng)價(jià)應(yīng)用分析[J].高壓電器,2013(2):55-60.OU Xianglin,DENG Heming,WANG Linong.Application analysis of live operation safety comprehensive evaluation for 10kV distribution line[J].High-voltage appliance,2013(2):55-60.
[2]郭謀發(fā),劉世丹,楊耿杰.利用時(shí)頻譜相似度識(shí)別的配電線路接地選線方法[J].中國(guó)電機(jī)工程學(xué)報(bào),2013,33(19):183-190.GUO Moufa,LIU Shidan,YANG Genjie.Method for grounding line selection of distribution line based on spectrum similarity identification[J].Chinese Journal of Electrical Engineering,2013,33(19):183-190.
[3]羅大強(qiáng),唐軍,許志榮.10kV架空配電線路防雷措施配置方案分析[J].電瓷避雷器,2012(5):113-118.LUO Daqiang,TANG Jun,XU Zhirong.Analysis of configuration measures for lightning protection measures of 10kV overhead distribution lines[J].Insulators and Surge Arresters,2012(5):113-118.
[4]張?chǎng)危昌埲A.配電線路暫態(tài)保護(hù)故障行波特征的研究[J].電力系統(tǒng)保護(hù)與控制,2013(12):1-8.ZHANG Xin,MOU Longhua.Study on characteristics of fault traveling wave for transient protection of distribution line[J].Power system protection and control,2013(12):1-8.
[5]毛金枝,楊俊華,陳思哲.基于對(duì)等控制策略的微電網(wǎng)運(yùn)行[J].電測(cè)與儀表,2014,24(51):11-17.MAO Jinzhi,YANG Junhua,CHEN Sizhe.Microgrid operation based on peer to peer control strategy[J].Electrical measurement and instrumentation,2014,24(51):11-17.
[6]羅永捷,李耀華,王平.多端柔性直流輸電系統(tǒng)下垂控制P-V特性曲線時(shí)域分析[J].電工技術(shù)學(xué)報(bào),2014,29(1):408-415.LUO Yongjie,LI Yaohua,WANG Ping.Multi terminal flexible DC transmission system,droop control,P-V characteristic curve,time domain analysis[J].Transactions of China Electrotechnical Society,2014,29(1):408-415.
[7]姜曉平,朱奕,傘冶.大功率隨動(dòng)試驗(yàn)臺(tái)多永磁同步電機(jī)同步控制[J].電機(jī)與控制學(xué)報(bào),2014,18(4):88-95.JIANG Xiaoping,ZHU Yi,SAN Ye.High power synchronous servo control of permanent magnet synchronous motor test bench[J].Journal of electrical engineering and control,2014,18(4):88-95.
[8]燕穎,潘庭龍.含多微源的微網(wǎng)并網(wǎng)優(yōu)化運(yùn)行研究[J].電子設(shè)計(jì)工程,2016,24(7):13-16.YAN Ying,PAN Tinglong.Optimal operation of microgrid connected with multiple micro sources[J].Electronic design engineering,2016,24(7):13-16.
[9]許吉強(qiáng),盧聞州,吳雷.低壓微電網(wǎng)逆變器并離網(wǎng)平滑切換控制[J].科學(xué)技術(shù)與工程,2017(9):36-44.XU Jiqiang,LU Wenzhou,WU Lei.Off grid smoothing switching control for low voltage microgrid Inverters[J].Science,technology and Engineering,2017(9):36-44.
[10]張靠社,亓婷.微電網(wǎng)中并列運(yùn)行逆變器控制策略研究[J].電網(wǎng)與清潔能源,2012,28(10):74-77.ZHANG Kaoshe,BIAN Ting.Research on control strategy of parallel inverters in microgrid[J].Power grids and clean energy,2012,28(10):74-77.
[11]潘庭龍,萬(wàn)紅淑,紀(jì)志成.基于改進(jìn)下垂控制的微網(wǎng)孤島運(yùn)行研究[J].控制工程,2014,21(4):496-500.PAN Tinglong,WAN Hongshu,JI Zhicheng.Study on islanding operation of microgrid based on improved droop control[J].Control engineering,2014,21(4):496-500.
[12]張勤進(jìn),劉彥呈,王川.微源逆變器多模式運(yùn)行協(xié)調(diào)控制策略研究[J].電機(jī)與控制學(xué)報(bào),2017,21(2):35-44.ZHANG Qinjin,LIU Yancheng,WANG Chuan.Multi mode coordinated control strategy for micro source inverters[J].Journal of electrical engineering and control,2017,21(2):35-44.
[13]郭磊,張英敏,李興源.基于三自由度內(nèi)模解耦控制的VSC-MTDC性能分析[J].電測(cè)與儀表,2015,52(16):54-60.GUO Lei,ZHANG Yingmin,LI Xingyuan.Performance analysis of VSC-MTDC based on three degrees of freedom internal model decoupling control[J].Electrical measurementand instrumentation, 2015,52(16):54-60.
[14]張國(guó)榮,謝潔.用于微網(wǎng)逆變器并聯(lián)的控制策略[J].電測(cè)與儀表,2014(12):60-64.ZHANG Guorong,XIE Jie.Control strategy for parallel inverters in microgrid[J].Electrical measurement and instrumentation,2014(12):60-64.
[15]王瑩瑩,梅生偉,劉鋒.混合電力系統(tǒng)合作博弈規(guī)劃的分配策略研究[J].系統(tǒng)科學(xué)與數(shù)學(xué),2012,32(4):418-428.WANG Yingying,MEI Shengwei,LIU Feng.Allocation strategy of cooperative game planning for hybrid power system[J].Systems Science and Mathematics,2012,32(4):418-428.
[16]殷若鵬,尤冬石,劉亞龍.基于電磁耦合補(bǔ)償反饋抑制的無(wú)刷直流電機(jī)控制仿真[J].智能計(jì)算機(jī)與應(yīng)用,2016,6(3):74-77.YIN Ruopeng,YOU Dongshi,LIU Yalong.Control simulation of Brushless DC motor based on electromagnetic coupling compensation feedback suppression[J].Intelligent computers and Applications,2016,6(3):74-77.
[17]安云鵬,劉金寧,趙錦成.基于改進(jìn)電導(dǎo)增量法MPPT控制仿真研究[J].電子技術(shù)應(yīng)用,2015,41(3):130-132.AN Yunpeng,LIU Jinning,ZHAO Jincheng.Simulation Research of MPPT control based on improved conductance increment method[J].Application of electronic technology,2015,41(3):130-132.
[18]李琴.基于嵌入式技術(shù)的小型恒壓控制系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)[J].現(xiàn)代電子技術(shù),2017(8):578-582.LI Qin.Design and implementation of small constant voltage control system based on Embedded Technology[J].Modern electronic technology,2017(8):578-582.
Research on Peer to Peer Control Strategy for Multiple Micro Source Distribution Lines
WANG QianYUAN YaningWANG ChunmeiLI Yimeng
(State Grid Jibei Electric Power Company Limited Skills Training Center,Baoding 071000)
In a distribution line system with multiple micro sources,peer to peer control is one of the control strategies to make the micro source coordinate effectively and the system run safely and stably.In the peer to peer control strategy,the droop control method is adopted for each micro source.In view of the traditional droop control of output impedance properties and distribution lines do not accord with the line impedance unbalances reasonable distribution of influence power,introduced a method to control the line anti sagging impedance voltage drop compensation feedback.Simulation analysis of distribution line system containing six specific micro sources built on the PSCAD/EMTDC platform for a variety of conditions,the simulation results verify the correctness of the proposed control method and the equivalent control strategy in grid connected mode/island operation mechanism and its characteristics.
distribution line,peer to peer control,inverse droop control,line impedance,power allocation
TN76
10.3969/j.issn.1672-9722.2017.10.013
Class Number TN76
2017年4月10日,
2017年5月20日
國(guó)家自然科學(xué)基金項(xiàng)目(編號(hào):51607042)資助。
王茜,女,碩士,助教,研究方向:電力系統(tǒng)分析與控制。原亞寧,男,碩士,助教,研究方向:新能源發(fā)電與微電網(wǎng)技術(shù)。王春梅,女,碩士,助教,研究方向:電力電子與電力傳動(dòng)。李怡萌,女,碩士,助教,研究方向:電力系統(tǒng)故障診斷,電力電子控制技術(shù)。
猜你喜歡
艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:37
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
電測(cè)與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(shù)(2016年5期)2016-03-22 01:09:38
電機(jī)與控制應(yīng)用(2015年2期)2015-03-01 03:49:24
電測(cè)與儀表(2014年24期)2014-04-09 11:35:36