粳稻多旋翼植保無人機霧滴沉積垂直分布研究
2017-11-15 09:28:51許童羽于豐華曹英麗馬明洋
農業機械學報 2017年10期
許童羽 于豐華 曹英麗 杜 文 馬明洋
(1.沈陽農業大學信息與電氣工程學院,沈陽 110866; 2.遼寧省農業信息化工程技術研究中心,沈陽 110866)
粳稻多旋翼植保無人機霧滴沉積垂直分布研究
許童羽1,2于豐華1曹英麗1,2杜 文1馬明洋1
(1.沈陽農業大學信息與電氣工程學院,沈陽 110866; 2.遼寧省農業信息化工程技術研究中心,沈陽 110866)
為研究多旋翼植保無人機低空噴施作業過程中,水稻垂直方向霧滴沉積的分布規律,在水稻冠層葉片、中部葉片、底部葉片分別放置了霧滴測試卡,收集植保無人機噴灑過程中的霧滴信息。使用清水代替農藥來模擬噴施過程,利用霧滴沉積分析軟件iDAS分析霧滴測試卡,得出植保無人機霧滴在水稻垂直方向的分布結果。試驗結果表明:植保無人機低空噴霧在水稻垂直方向的霧滴覆蓋率存在顯著差異,有效噴幅內旋翼下方區域的霧滴覆蓋效果最好,而遠離旋翼的位置,霧滴覆蓋率較差。從水稻垂直方向的不同位置分析,霧滴總體覆蓋率為冠層54.86%,中部32.69%,底部24.7%;水稻垂直各位置的粒徑分布中,平均粒徑范圍處于110~140 μm之間,粒徑大小適合植物病蟲的防治。冠層的點密度最大,而水稻中間部位和水稻底部的點密度分布較為相似;水稻中部霧滴擴散比(0.465)優于冠層(0.38)和底部(0.31),整體噴霧的霧滴擴散比與相對粒譜寬度的數值均低于正常值(0.67)。
植保無人機; 霧滴沉積; 粳稻
引言
遼寧省是我國重要的糧食主產區,水稻是遼寧省主要栽培的糧食作物之一,近年來隨著農藥、化肥等用量的不斷增加,造成了土壤退化、環境污染和稻米品質下降等情況,為此2015年農業部制定了《到2020年化肥使用量零增長行動方案》和《到2020年農藥使用量零增長行動方案》。“十三五”期間,對水稻植保進行高效作業和管理,是降低農藥化肥使用量、提高效率的關鍵問題之一[1]。多旋翼植保無人機由于其體積小、易操控、安全性高、不需要特殊跑道等特點,近年來在區域級的農作物田間植保作業中得到了快速的發展。茹煜等[2]設計了基于無人機的低量噴霧系統,能夠進行遠距離控制,并進行了離心噴霧效果的性能試驗和理論探索。王昌陵等[3]基于紅外熱像儀通過對植保無人機作業前后的冠層溫度進行測量,利用溫度的變化率來評估霧滴在水稻冠層的沉積情況。杜文等[4]分析了采用多旋翼無人機在灌漿期噴施葉面肥的水稻冠層霧滴沉積效果。張宋超等[5]利用單旋翼直升機,對玉米栽培過程中的無人機植保作業的霧滴沉積效果進行了研究,為無人機噴霧系統的優化設計,提高噴灑效率等提供了一定的技術依據。邱白晶等[6]研究了無人直升機飛行高度與速度對噴霧沉積分布的影響。袁會珠等[7]論述了霧滴粒徑大小、覆蓋密度與殺蟲劑、殺菌劑和除草劑藥效之間的關系,為農業生產、無人機精準化施藥提供參考。蘭玉彬團隊[8-10]研究了不同噴霧作業參數對水稻冠層霧滴沉積分布的影響,并研究了風場因素對植保作業的影響,對于合理使用無人機植保作業,提高噴濕效率具有重要指導意義。
傳統的水稻植保作業的方式主要包括人工噴施、地面機械作業、固定翼飛機植保作業3種方式。在傳統的植保作業方式中,人工作業勞動強度大、危險性高、工作效率低、作業時間長。地面機械田間行進困難,容易造成耕地損壞,還會造成一定的水稻破壞[11]。固定翼飛機植保作業受場地條件約束較大,同時霧滴漂移情況比較嚴重,成本也較高。而植保無人機技術作為我國近年來快速發展起來的新型植保方式,能夠有效地改善傳統植保技術的不足,正在成為水稻植保作業的首選方式。目前植保無人機負載有限,通常情況下藥箱容量為5~20 kg。因此無人機在水稻植保作業中,需采用超低容量噴霧技術[12-13]。
本文主要針對我國遼寧地區水稻無人機植保的發展現狀,利用多旋翼植保無人機進行水稻田間施藥作業,研究不同飛行參數條件對水稻植保作業中霧滴沉積分布的影響,探討霧滴在水稻上的垂直分布特性,為提高無人機植保施藥效果、降低農藥使用量提供數據支撐和理論基礎。
1 材料與方法
1.1 儀器設備
采用深圳大疆創新技術有限公司生產的MG-1八旋翼電動無人直升機,如圖1a所示,主要性能指標如表1所示。

圖1 試驗無人機與試驗現場Fig.1 Test UAV and site
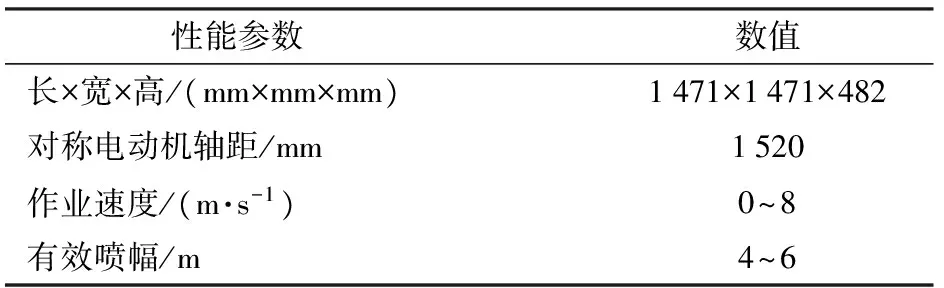
表1 MG-1植保無人機主要性能參數Tab.1 Main performance index of MG-1
無人機藥液噴灑系統由防震蕩藥箱、水泵、藥業管、陶瓷噴頭等構成,共有4個離心式噴頭,位于左右4個旋翼下方,噴頭方向朝下垂直于地面,單個噴頭最大流量為 0.43 L/min。通過便攜式風速計、手持式溫濕度檢測儀獲取試驗時的環境信息。本研究采用瑞士先正達公司的霧滴測試卡收集和檢驗無人機噴灑的霧滴分布、粒徑大小及覆蓋度等關鍵信息。
1.2 試驗方法
1.2.1試驗地點與材料
試驗地點位于遼寧省沈陽市“沈陽農業大學水稻育種栽培試驗基地”,試驗時間為2016年9月7日,水稻生育期為灌漿期,試驗區水稻植株平均高度為117 cm,試驗品種為沈稻529。水稻采用人工插秧,行間距為30 cm。試驗當天環境平均溫度為23.45℃,相對濕度32.89%,風速為0.875 m/s。
1.2.2采樣點布置
在試驗田選擇的26 m×54 m矩形田塊中進行試驗,無人機飛行高度為水稻冠層上方1 m,設置飛行速度為1.5 m/s,試驗共設置3個重復。為了減少稻葉上露水等干擾因素對霧滴測試卡采集數據的影響,試驗在08:50開始,沿垂直無人機植保作業方向,將霧滴測試卡布在水稻垂直空間的冠層葉片、中部葉片(距地面60 cm)、底部。按照水稻種植的行距分布,每行共布17個霧滴采集點。采收帶長度約8 m,大于噴幅范圍,以便收集所有霧滴。霧滴測試卡用曲別針夾于水稻葉片的正、反兩面。試驗中,無人機采用自主作業方式,按照預設的中軸線飛行,為提高飛行定位精度,本研究分別在無人機和地面設置差分模塊和定位基站,采用差分GPS的方法提高定位精度。為避免霧滴飄移現象造成誤差,重復試驗之間設置10 m的間隔距離,兩組試驗之間設置15 m的間隔距離。植保作業噴灑結束30 min后,佩戴一次性手套按順序收取霧滴測試卡,以保證霧滴測試卡能夠充分晾干,并對霧滴測試卡進行編號、封裝,帶回實驗室進行分析。試驗布點位置如圖2所示。

圖2 試驗小區布置Fig.2 Schematic diagram of test plots layout
1.2.3霧滴測試卡與試劑
本研究所使用的霧滴測試卡底色為黃色,遇水后迅速變為藍色,顏色變化非常明顯,如圖3所示。霧滴測試卡尺寸為26 mm×76 mm,試驗使用純凈水替代農藥對水稻進行噴施。
圖3 霧滴測試卡Fig.3 Droplet test card
1.2.4無人機作業參數設計
本次試驗的目的是研究植保無人機霧滴在水稻垂直方向上的霧滴沉積分布規律,根據先前試驗經驗和文獻資料,設置飛行高度為水稻冠層上方1 m,噴頭流量為0.25 L/min。飛行速度設置為1.5 m/s。
1.3 數據處理
待霧滴測試卡充分晾干后,將霧滴測試卡按照編號逐一放入塑封袋中,帶回實驗室進行后續的數據分析。通過掃描儀進行掃描,將掃描后的數據利用圖像處理軟件iDAS進行分析處理,得到多旋翼植保無人機在相同高度不同速度情況下水稻植保作業的霧滴覆蓋率、覆蓋密度及沉積量等關鍵信息。本研究對3次重復試驗的相同位置采用皮爾森相關性進行分析對比,結果如表2、3所示。

表2 3個重復試驗覆蓋率相關性Tab.2 Correlation of coverage rate for three repeated tests
注:** 表示2個變量差異達到P<0.01極顯著性檢驗水平。
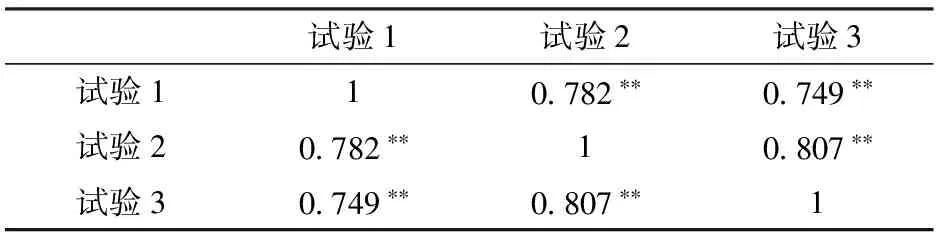
表3 3個重復試驗霧滴點數相關性Tab.3 Droplets correlation of three repeated tests
注:** 表示兩個變量達到P<0.01極顯著性檢驗水平。
由表2和表3可知3組重復試驗的相關性比較理想,均達到了極顯著性檢驗水平,因此本研究將3次重復試驗求平均進行分析,以降低誤差。
2 結果與分析
2.1 霧滴覆蓋率與回收率分析
圖4為本研究試驗的水稻垂直方向不同位置的霧滴覆蓋率與回收率的結果,圖中的橫坐標表示每條霧滴采集帶的實際長度。在本研究中覆蓋率為浸染面積與采樣面積之比,回收率為沉積量與采樣面積之比。浸染面積為水敏試紙上被水洇濕后發生顯色反應的總面積。采樣面積為處理的水敏圖像的總面積,為浸染面積和未浸染面積之和。而回收率能夠反映單位面積上的霧滴沉積量。
由霧滴覆蓋率和回收率的分析結果可以看出,植保無人機在作業過程中,霧滴落在水稻葉片上的分布差異比較明顯。從圖4中可知在6 m的有效噴幅內,無人機作業均勻性較差,在本研究中噴頭所在的位置下方霧滴覆蓋率相比其他位置的霧滴覆蓋率好。而遠離噴頭位置的地方霧滴覆蓋效果并不理想。
在垂直方向上,霧滴的覆蓋分布程度在水稻冠層、中部、底部分布情況較為相似,在2~4 m之間覆蓋程度較好。從霧滴覆蓋率的數值上可以看出,冠層覆蓋率優于水稻中部和底部的覆蓋率,如表4所示。
2.2 霧滴粒徑分布分析
圖5為本研究試驗的水稻垂直方向不同位置的霧滴粒徑分布情況,圖中縱坐標表示霧滴直徑和點密度,橫坐標為霧滴采集帶的實際長度。DV1、DV5、DV9分別表示體積累加到10%、50%、90%時的霧滴直徑。霧滴直徑可由沉積面積和擴散系數計算得到,點密度可由點數比上采樣面積得到。
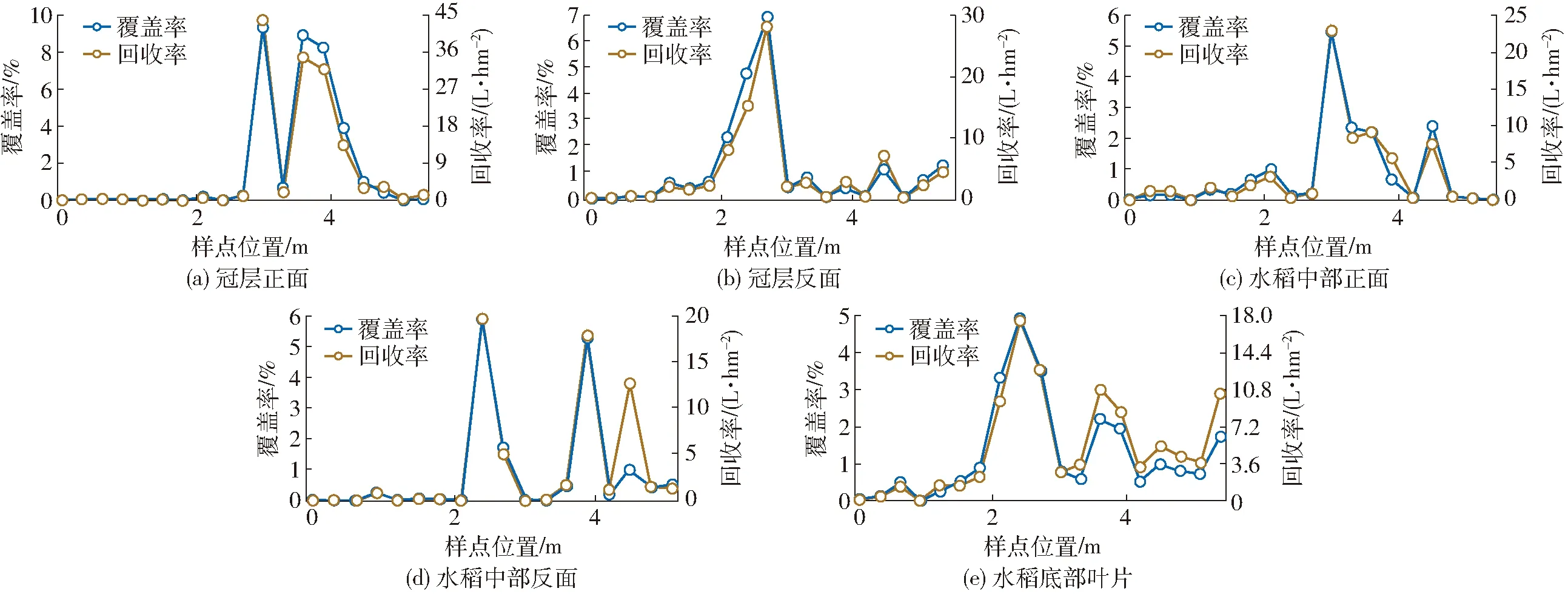
圖4 水稻垂直方向的霧滴覆蓋率與回收率Fig.4 Droplet coverage rate and recovery rate in vertical direction of rice

圖5 水稻垂直方向的霧滴粒徑分布Fig.5 Droplet size distributions in vertical direction of rice
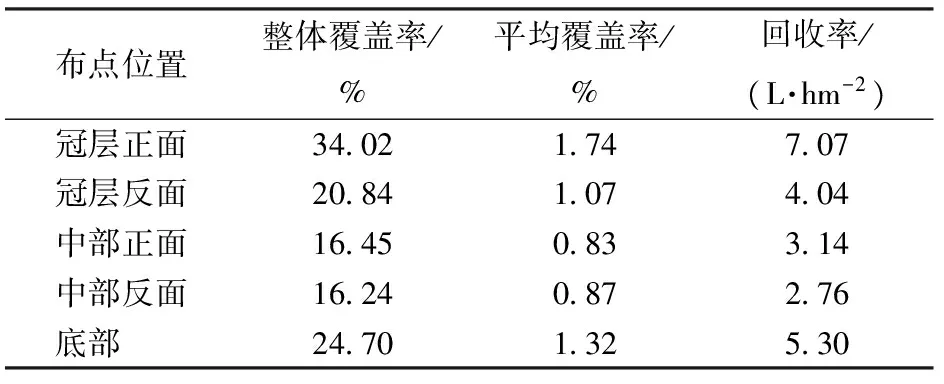
表4 水稻垂直方向霧滴覆蓋率與回收率分布Tab.4 Droplet coverage rate and recovery rate distributions in vertical direction of rice
由于植保無人機在作業過程中,液滴經過噴霧器械霧化部件的作用而分散。但從噴頭噴出的霧滴大小并非均勻一致,而是有大有小,呈一定的分布,用μm作為單位。霧滴粒徑是衡量藥液霧化程度和作業質量的重要指標之一。最易被生物體捕獲并能取得最佳防治效果的霧滴粒徑稱為生物最佳粒徑。殺蟲劑、殺菌劑、除草劑的最佳粒徑范圍不同。對于飛行昆蟲而言,生物最佳粒徑為10~50 μm,作物葉面爬行類害蟲幼蟲,生物最佳粒徑為30~150 μm,對植物病害和雜草生物最佳粒徑分別為30~150 μm和100~300 μm。從圖5中可以看出水稻不同位置的粒徑分布與點密度的分布情況存在明顯差異。植保無人機旋翼下方的點密度較好,而離旋翼較遠的霧滴測試卡采集的點密度則相對較小,從分布規律可以看出,粒徑分布和點密度的變化受旋翼風場的影響較大。
表5為水稻垂直各位置的粒徑分布情況,冠層的點密度最大,而水稻中間部位和水稻底部的點密度相差不大。從粒徑均值的數據來看,平均粒徑范圍處于110~140 μm之間,適合用于植物病蟲的防治。
2.3 擴散比與相對粒譜寬度分析
擴散比與相對粒譜寬度是國際上用來衡量霧滴噴灑效果的常用指標,擴散比為體積中值直徑與數量中值直徑之比。相對粒譜寬度為DV9與DV1差值與DV5之比。
霧滴擴散比的理想值為1,即全部霧滴體積相同;通常情況下擴散比范圍在0.67~1內就被認為霧滴分布比較均勻。而相對粒譜寬度數值越小越好,理想值為零,即占總體積80%的霧滴體積相同。從圖6中可以看出水稻不同位置的擴散比和相對粒譜寬度變化差異非常明顯,同時在植保無人機的有效噴幅內,2個數值的分布情況也變化較大。
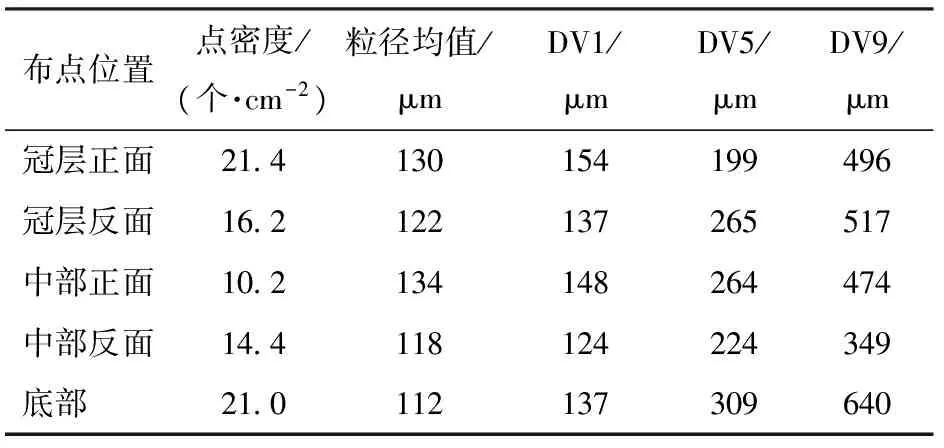
表5 水稻垂直方向粒徑分布Tab.5 Droplet size distribution in vertical direction of rice
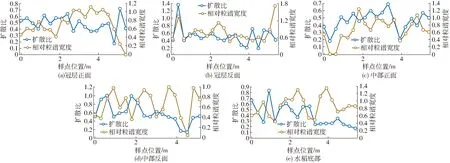
圖6 水稻垂直方向的霧滴擴散比與相對粒譜寬度Fig.6 Diffusion ratio and relative width of droplet size in vertical direction of rice
表6是霧滴擴散比與相對粒譜寬度在水稻不同位置上的分布情況,從表中可以看出,水稻中部的擴散比和相對粒譜寬度都要優于水稻冠層和水稻底部,但其數值與正常值之間依然存在一定的差距。
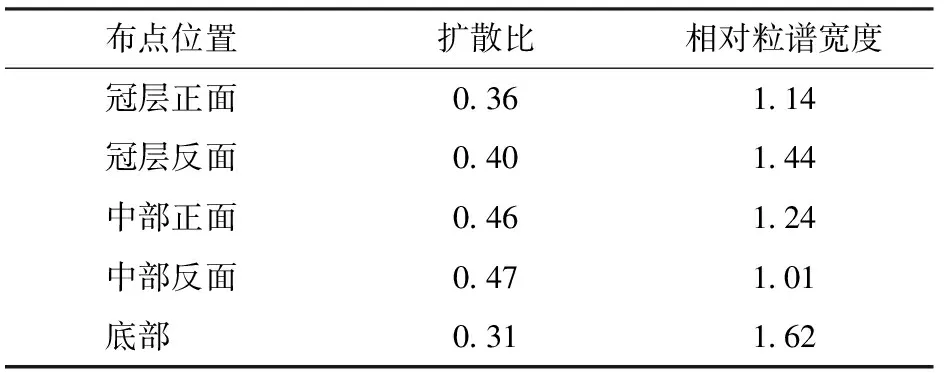
表6 水稻垂直方向擴散比與相對粒譜寬度分布Tab.6 Distributions of diffusion ratio and relative width of droplet size in vertical direction of rice
3 討論
通過八旋翼植保無人機對東北粳稻田間管理進行噴施作業,主要通過在水稻植株上不同位置布置霧滴測試卡,來研究分析植保無人機作業過程中霧滴在水稻垂直方向上的沉積分布情況。
通過圖4的霧滴覆蓋率與回收率的分析可知,植保無人機在水稻植保的作業過程中,霧滴覆蓋分布情況較差,在植保無人機有效噴幅范圍內,覆蓋較好的地方通常位于旋翼下方,而旋翼兩側覆蓋率較差,造成這樣的原因可能是霧滴過細,而旋翼的風場對于霧滴的沉積起到了關鍵作用。而旋翼風場之外的霧滴其受力情況較為復雜,包括環境風場、旋翼風場的邊界效應,環境溫度等多重因素的影響,一部分在還沒有落到葉片上就已經在空氣中消散,另一部分由于復雜風力的作用發生了飄移[14-16]。通過正反面霧滴分布情況可以看出,水稻正反面霧滴分布情況基本一致,這可能是由于東北粳稻葉片較為直立,在多旋翼風場的作用下造成的,本研究未對旋翼風場進行深入研究。通過表4的數據可以看出,水稻冠層覆蓋率為54.86%,中部覆蓋率為32.69%,底部覆蓋率為24.7%,說明植保無人機的穿透性能還是比較理想的,能夠很好地在水稻的各個位置進行附著。通過表5的數據可以看出,本次試驗的粒徑均值在110~140 μm之間,粒徑分布情況與霧滴覆蓋情況較為相似,本研究所采用的霧滴測試卡存在霧滴聚集的情況,同時采用圖像分析的手段進行,因此本研究所得到的霧滴粒徑結果可能會包含這樣的誤差情況[17]。圖6和表6的擴散比與相對粒譜寬度的數據表明,本研究所采用的植保無人機噴霧效果并不理想,綜合指標均低于合理水平,這也是目前植保無人機都存在的問題,造成這樣結果是由飛行參數、噴頭、作物自身特性等多因素共同造成的,本研究未對此進行深入的研究。
通過對以上試驗結果的分析可知:植保無人機作業過程中的霧滴沉積分布規律不僅與無人機的作業參數有關,還與風場(旋翼風場和外界風場)存在著十分顯著的相關性[18]。由于植保無人機的霧滴粒徑較細,在空中容易飄移,而植保無人機的霧滴沉積規律需要從根本上研究其風場分布的規律,同時需要對霧滴的受力情況開展深入研究。本研究采用軟件來識別試驗過程中的霧滴粒徑,但從實際霧滴在測試卡上的沉積效果來看,當霧滴沉積量較少時能夠準確識別出霧滴個數,但當霧滴覆蓋較多時,霧滴容易出現重疊、黏連等情況,利用識別軟件進行霧滴分析會造成一定的誤差,但總體趨勢是一致的[19-21]。
4 結論
(1)植保無人機低空噴霧,在水稻不同位置的霧滴覆蓋率存在著顯著差異,有效噴幅范圍內,旋翼下方區域的霧滴覆蓋效果最好,而遠離旋翼的位置,霧滴覆蓋率較差。從水稻不同位置來看,冠層霧滴總體覆蓋率為冠層54.86%,中部32.69%,底部24.7%。
(2)水稻垂直各位置的粒徑分布中,平均粒徑范圍處于110~140 μm之間,粒徑大小適合植物病蟲的防治。冠層的點密度最大,而水稻中間部位和水稻底部的點密度分布較為相似。
(3)水稻中部霧滴擴散比(0.465)優于冠層(0.38)和底部(0.31),整體噴霧的霧滴擴散比與相對粒譜寬度的數值均低于正常數值(0.67)。
1 張亞莉,蘭玉彬,BRADLEY Fritz,等.美國航空靜電噴霧系統的發展歷史與中國應用現狀 [J].農業工程學報,2016,32(10):1-7.
ZHANG Yali, LAN Yubin, BRADLEY Fritz, et al.Development of aerial electrostatic spraying systems in the United States and applications in China[J].Transactions of the CSAE, 2016, 32(10): 1-7.(in Chinese)
2 茹煜,金蘭,周宏平,等.航空施藥旋轉液力霧化噴頭性能試驗[J].農業工程學報,2014,30(3):50-55.
RU Yu, JIN Lan, ZHOU Hongping, et al.Performance experiment of rotary hydraulic atomizing nozzle for aerial spraying application[J].Transactions of the CSAE, 2014, 30(3): 50-55.(in Chinese)
3 王昌陵,何雄奎,王瀟楠,等.無人植保機施藥霧滴空間質量平衡測試方法[J].農業工程學報,2016,32(11):54-61.
WANG Changling, HE Xiongkui, WANG Xiaonan, et al.Testing method of spatial pesticide spraying deposition quality balance for unmanned aerial vehicle[J].Transactions of the CSAE, 2016, 32(11): 54-61.(in Chinese)
4 杜文,曹英麗,許童羽,等.無人機噴霧參數對粳稻冠層沉積量的影響及評估[J].農機化研究,2017,39(4):182-186.
DU W,CAO Y L,XU T Y,et al.Effect and assessment of UAV spraying parameters at japonica rice canopies[J].Journal of Agricultural Mechanization Research,2017,39(4):182-186.(in Chinese)
5 張宋超,薛新宇,秦維彩,等.N-3型農用無人直升機航空施藥飄移模擬與試驗[J].農業工程學報,2015,31(3):87-93.
ZHANG Songchao, XUE Xinyu, QIN Weicai, et al.Simulation and experimental verification of aerial spraying drift on N-3 unmanned spraying helicopter[J].Transactions of the CSAE, 2015, 31(3): 87-93.(in Chinese)
6 邱白晶,王立偉,蔡東林,等.無人直升機飛行高度與速度對噴霧沉積分布的影響[J].農業工程學報,2013,29(24):25-32.
QIU Baijing, WANG Liwei, CAI Donglin, et al.Effects of flight altitude and speed of unmanned helicopter on spray deposition uniform[J].Transactions of the CSAE, 2013, 29(24): 25-32.(in Chinese)
7 袁會珠, 王國賓.霧滴大小和覆蓋密度與農藥防治效果的關系[J].植物保護, 2015(6):9-16.
YUAN Huizhu, WANG Guobin.Effectts of droplet size and deposition density on field efficacy of pesticides [J].Plant Protection,2015(6):9-16.(in Chinese)
8 陳盛德,蘭玉彬,李繼宇,等.小型無人直升機噴霧參數對雜交水稻冠層霧滴沉積分布的影響[J].農業工程學報,2016,32(17):40-46.
CHEN Shengde, LAN Yubin, LI Jiyu, et al.Effect of spray parameters of small unmanned helicopter on distribution regularity of droplet deposition in hybrid rice canopy[J].Transactions of the CSAE, 2016, 32(17): 40-46.(in Chinese)
9 文晟,蘭玉彬,張建桃,等.農用無人機超低容量旋流噴嘴的霧化特性分析與試驗[J].農業工程學報,2016,32(20):85-93.
WEN Sheng, LAN Yubin, ZHANG Jiantao, et al.Analysis and experiment on atomization characteristics of ultra-low-volume swirl nozzle for agricultural unmanned aviation vehicle[J].Transactions of the CSAE, 2016, 32(20): 85-93.(in Chinese)
10 王玲,蘭玉彬,HOFFMANN W C,等.微型無人機低空變量噴藥系統設計與霧滴沉積規律[J/OL].農業機械學報,2016,47(1):15-22.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20160103&flag=1.DOI: 10.6041/j.issn.1000-1298.2016.01.003.
WANG Ling, LAN Yubin, HOFFMANN W C, et al.Design of variable spraying system and influencing factors on droplets deposition of small UAV[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2016,47(1):15-22.(in Chinese)
11 秦維彩,薛新宇,周立新,等.無人直升機噴霧參數對玉米冠層霧滴沉積分布的影響[J].農業工程學報,2014,30(5):50-56.
QIN Weicai, XUE Xinyu, ZHOU Lixin, et al.Effects of spraying parameters of unmanned aerial vehicle on droplets deposition distribution of maize canopies[J].Transactions of the CSAE, 2014, 30(5): 50-56.(in Chinese)
12 蔣煥煜,周鳴川,李華融,等.PWM變量噴霧系統動態霧滴分布均勻性實驗[J/OL].農業機械學報,2015,46(3):73-77.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20150310&flag=1.DOI:10.6041/j.issn.1000-1298.2015.03.010.
JIANG Huanyu, ZHOU Mingchuan, LI Huarong, et al.Experiment on dynamic droplet distribution uniformity for PWM variable spray system[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2015,46(3):73-77.(in Chinese)
13 FRITZ B K, HOFFMANN W C, BAGLEY W E, et al.Influence of air shear and adjuvants on spray atomization[J].Journal of Structural Engineering,2014,117(1):292-294.
14 張東彥,蘭玉彬,陳立平.中國農業航空施藥技術研究進展與展望[J/OL].農業機械學報,2014,45(10):53-59.http:∥www.j-csam.org/jcsam/ch/re ader/view_abstract.aspx?file_no=20141009&flag=1.DOI:10.6041/j.issn.1000-1298.2014.10.009.
ZHANG Dongyan, LAN Yubin, CHEN Liping.Current status and future trends of agricultural aerial spraying technology in China[J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(10):53-59.(in Chinese)
15 ZHANG Jili.Agricultural experimental research of aviation spray system[J].Agricultural Technology & Equipment, 2014,8(5): 56-59.
16 李繼宇,周志艷,蘭玉彬,等.旋翼式無人機授粉作業冠層風場分布規律[J].農業工程學報,2015,31(3):77-86.
LI Jiyu, ZHOU Zhiyan, LAN Yubin, et al.Distribution of canopy wind field produced by rotor unmanned aerial vehicle pollination operation[J].Transactions of the CSAE, 2015, 31(3): 77-86.(in Chinese)
17 張建桃,李晟華,文晟,等.農用超聲霧化換能器參數優化設計與試驗[J].農業工程學報,2015,31(12): 8-15.
ZHANG Jiantao, LI Shenghua, WEN Sheng, et al.Parameter optimization design and experiment of agricultural ultrasonic atomization transducer[J].Transactions of the CSAE, 2015, 31(12): 8-15.(in Chinese)
18 張瑞瑞, 陳立平, 蘭玉彬,等.航空施藥中霧滴沉積傳感器系統設計與實驗[J/OL].農業機械學報, 2014,45(8):123-127.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20140820&flag=1.DOI:10.6041/j.issn.1000-1298.2014.08.020.
ZHANG Ruirui, CHEN Liping, LAN Yubin, et al.Development of a deposit sensing system for aerial spraying application [J/OL].Transactions of the Chinese Society for Agricultural Machinery,2014,45(8):123-127.(in Chinese)
19 薛新宇,蘭玉彬.美國農業航空技術現狀和發展趨勢分析[J/OL].農業機械學報, 2013,44(5): 194-201.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20130534&flag=1.DOI:10.6041/j.issn.1000-1298.2013.05.034.
XUE Xinyu,LAN Yubin.Agricultural aviation applications in USA[J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2013,44(5): 194-201.(in Chinese)
20 GONG Cihun-Siyong A, CHIU H K, HUANG Liren, et al.Low-cost comb-electrode capacitive sensing device for liquid-level measurement[J].IEEE Sensors Journal, 2016,16(9):2896-2897.
21 PACZESNY D.The capacitive sensor for liquid level measurement made with ink-jet printing technology[J].Procedia Engineering, 2015,38(6):731-735.
VerticalDistributionofSprayDropletDepositionofPlantProtectionMultiRotorUAVforJaponicaRice
XU Tongyu1,2YU Fenghua1CAO Yingli1,2DU Wen1MA Mingyang1
(1.CollegeofInformationandElectricalEngineering,ShenyangAgriculturalUniversity,Shenyang110866,China2.LiaoningEngineeringResearchCenterforInformationTechnologyinAgriculture,Shenyang110866,China)
In order to study the vertical distribution of spray droplet deposition of plant protection multi rotor UAV in low altitude spraying operation process, droplet test card were placed in rice canopy leaves, middle leaves and bottom leaves to collect protection UAV spray droplet.Water was used instead of pesticide in spraying process simulation, and iDAS analysis software was used to analyze the droplet deposition on the test card and the distribution of spray droplet deposition at different positions.The results showed that the spray droplet coverage rate of low altitude UAV in vertical direction was significantly different, the droplet coverage effect in the effective range and below rotor was the best, and the droplet coverage effect away from the rotor was poor.From different positions of rice canopy, overall droplet coverage rate in canopy was 54.86%, in middle canopy was 32.69%, and in bottom canopy was 24.7%.The particle size distribution in the vertical position of rice was in the range of 110~140 μm, and the particle size was suitable for the prevention and control of plant diseases and insect pests.The density of the canopy was the highest, while the density distribution of the middle part and the bottom of rice was similar.The central rice droplet diffusion ratio (0.465) was better than those of the canopy (0.38) and bottom (0.31), the overall spray width and relative numerical diffusion of particle spectrum were lower than the normal value (0.67).
plant protection UAV; deposition of droplets; japonica rice
10.6041/j.issn.1000-1298.2017.10.012
S252
A
1000-1298(2017)10-0101-07
2017-01-16
2017-04-01
國家重點研發計劃項目(2016YFD020060307)和遼寧省教育廳重點項目(LSNZD201605)
許童羽(1967—),男,教授,主要從事農業航空領域研究,E-mail:yatongmu@163.com
猜你喜歡
青少年科技博覽(中學版)(2022年6期)2022-12-27 19:44:27
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
今日農業(2021年21期)2021-11-26 05:07:00
軍事文摘(2021年22期)2021-11-26 00:43:51
今日農業(2021年14期)2021-10-14 08:35:40
學生天地(2020年17期)2020-08-25 09:28:54
文苑(2020年6期)2020-06-22 08:41:52
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
文苑(2019年22期)2019-12-07 05:29:00
故事大王(2016年7期)2016-09-22 17:30:08