載波跟蹤環路統計特性分析的欺騙檢測方法
2017-11-15 06:02:35劉丁浩索龍龍胡相譽
計算機應用 2017年9期
劉丁浩,呂 晶,索龍龍,胡相譽
(解放軍理工大學 通信工程學院,南京 210007)(*通信作者電子郵箱532406236@qq.com)
載波跟蹤環路統計特性分析的欺騙檢測方法
劉丁浩*,呂 晶,索龍龍,胡相譽
(解放軍理工大學 通信工程學院,南京 210007)(*通信作者電子郵箱532406236@qq.com)
針對現階段大部分衛星導航接收機跟蹤階段的欺騙檢測方法只能檢測單欺騙源發射的欺騙信號的問題,提出一種基于載波跟蹤環路統計特性分析的欺騙檢測方法。首先分析了跟蹤階段已有欺騙檢測方法的不足;其次,建立了接收機正常接收信號模型和欺騙信號入侵后接收信號模型,對真實信號與欺騙信號的復合信號的統計規律進行了分析。理論分析表明,當欺騙信號與真實信號存在頻差時,檢測算法能夠通過I路信號的幅度變化檢測出欺騙信號。仿真結果表明,在接收機能接收到的正常載噪比范圍內(28 dB·Hz~50 dB·Hz),在2%的虛警概率下能夠達到100%的檢測概率。算法能夠檢測多欺騙源發射的欺騙信號,且檢測性能比已有方法得到了提升(在載噪比相同的情況下,檢測性能提升約1 dB;在干信比相同的情況下,檢測性能提升約4 dB)。
全球導航衛星系統;欺騙檢測;鎖相環;統計特性
0 引言
全球導航衛星系統(Global Navigation Satellite System, GNSS)能夠為用戶提供高精度的全球定位、導航和授時服務,因而在軍用和民用領域都得到了廣泛的應用,是軍事活動和社會發展中不可或缺的基礎設施[1]。
衛星導航系統一般采用高軌衛星,衛星距離地面大約20 000 km,導致地面接收機接收到的衛星信號的功率很小,約為-160 dBW[2]。較低的信噪比使得到達接收機的衛星信號容易受到諸多干擾,例如壓制式干擾、欺騙式干擾[3]。相對于壓制式干擾,欺騙式干擾不易被接收機用戶察覺,因此具有更大的危害[4]。文獻[5]指出,只要欺騙信號功率大于真實信號4 dB,一段時間之后,接收機就能夠跟蹤到欺騙信號。
隨著導航技術的廣泛應用,針對導航系統的欺騙手段層出不窮。Todd等對欺騙技術進行了分類。從欺騙信號發射角度而言,欺騙技術可分為單欺騙源發射技術和多欺騙源發射技術[6]。單欺騙源欺騙技術利用單個信號發射源進行欺騙信號的發射,該欺騙源可以發射針對不同衛星的欺騙信號;多欺騙源發射技術利用多個欺騙源進行發射,每個欺騙源一般只發射針對某一顆衛星的欺騙信號,不同欺騙源發射的衛星欺騙信號一般不同。
近年來,國內外的專家學者對衛星導航信號欺騙檢測技術進行了大量的研究,檢測方法主要分為兩類。一是基于信號特性的欺騙檢測技術。例如Kim等[7]提出的基于信號到達時間的欺騙檢測方法,Bitner等[8]提出的基于信號到達角的欺騙檢測方法,Dehghanian等[9]提出的基于C/N0檢測方法的監測技術,針對特定的環境都有一定的作用。第二類是基于外部輔助的欺騙檢測技術。例如,Carson等[10]提出了一種雷達輔助的欺騙檢測方法。該類方法需要額外添加設備,對民用接收機而言費用較為昂貴。所以,現階段欺騙檢測方法主要集中在第一類。
在接收機的跟蹤階段,載波環和碼環能夠輸出多普勒頻率、鑒相誤差、載波相位和碼相位等值,能夠根據碼相關峰的大小測量功率,為欺騙檢測提供了許多重要參數。因此第一類欺騙檢測技術中的跟蹤階段的欺騙檢測方法研究成為導航抗欺騙領域的一個重要課題。例如,Psiaki等[11]針對單欺騙源發射的欺騙技術提出了雙天線載波相位差值檢測方法。該技術利用鎖相環估計載波相位,當兩個信號載波相位差小于設定的閾值時認為該組信號來自同一方向,此時判定為接收機受到欺騙;當來波方向各不相同時,判定未受到欺騙。該方法針對單欺騙源發射的欺騙信號有著良好的檢測效果,但是當多個欺騙源發射欺騙信號時,該方法失效。Broumandan等[12]同樣針對單欺騙源發射的欺騙技術提出基于信號空間關系的欺騙信號檢測方法。該方法通過測量信號的多普勒頻率來判定接收機是否受到欺騙。同一發射源發射的不同信號經過相同路徑進入接收機,其幅度衰減以及多普勒變化規律是一致的。當測定的多普勒頻率變化規律一致時,判定受到欺騙。該方法同樣不適應于多欺騙源發射模式。趙陸文等[13]提出了一種基于載波跟蹤譜分析的檢測方法。該方法利用跟蹤環路鑒相器輸出信號的頻譜特性與環路中是否存在干擾信號密切相關的特性,通過對鑒相器輸出信號進行譜分析,建立欺騙檢測模型,實現了欺騙信號檢測。此方法能夠較好地檢測單欺騙源和多欺騙源發射的欺騙信號。
本文提出了一種基于跟蹤環路統計特性分析的欺騙檢測方法。該方法能夠在單欺騙源和多欺騙源模式下,欺騙信號和真實信號頻率不一致時檢測出欺騙信號,并且檢測性能相較于文獻[13]得到了一定程度的提升。
1 系統模型
無論欺騙者采取何種發射方式,接收機接收到的都是不同衛星發射的真實信號和欺騙源發射的欺騙信號疊加的復合信號。該復合信號通過接收機的捕獲模塊之后,與本地不同的偽隨機碼相關,依據碼分多址的原理,解擴后的各個信號分別進入不同的接收機通道,進行跟蹤以及后續解算。當針對某顆衛星的欺騙信號與該衛星發射的真實信號具有相同的偽隨機碼時,欺騙信號才會對真實信號的環路產生影響。因此在經過捕獲模塊之后,接收機每個通道跟蹤到的實際上是某顆衛星真實信號和欺騙信號的疊加信號。因此,不管是單欺騙源還是多欺騙源發射,只需分析接收機跟蹤的某個通道的信號即可代表其他接收通道的情況。
1.1 正常接收信號模型
鎖相環在導航接收機中用于載波跟蹤。圖1為接收機中鎖相環的結構圖。首先,數字中頻信號進入跟蹤環路,分別與本地載波的同相和正交支路相乘,下變頻到基帶,得到兩路信號(I路和Q路信號)。將得到的兩路信號進行一定時長的預檢測積分(通常為1 ms或者其整數倍),將積分后的數據進行鑒相,經環路濾波器后得到誤差信號對本地復現的信號的參數進行修正。經過不斷地迭代,最終接收機穩定的跟蹤信號。
進入跟蹤環路的中頻信號為:
SIF(t)=A(t)C(t)D(t)sin(ωIFt+θIF)+nIF
(1)
其中:A為信號幅度,C為偽隨機碼,D為數據,ωIF為中頻頻率,θIF為載波相位,nIF為均值為0、方差為σ2的高斯白噪聲。
當本地碼與偽隨機碼完全對齊時,解擴后的中頻信號為:
SIF(t)=A(t)D(t)sin(ωIFt+θIF)+nIF
(2)
nIF可用窄帶隨機過程表示為:
nIF=nc(t)cos(ωIFt+θIF)+ns(t)sin(ωIFt+θIF)
(3)
本地產生的兩路正交的載波信號可表示為:
SIL=sin(ωLt+θL)
(4)
SQL=cos(ωLt+θL)
(5)
其中:SIL為同相信號,SQL為正交信號,ωL為本地載波頻率,θL為本地載波相位。
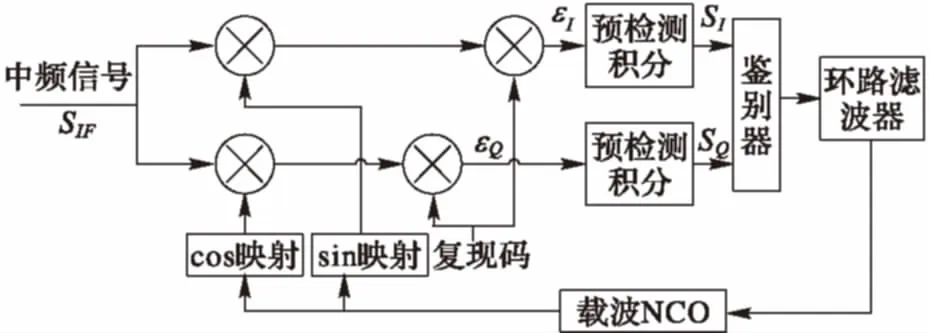
圖1 鎖相環模型
將解擴后的中頻信號與本地信號相乘,得到混頻信號εI和εQ:
εI=(A(t)D(t)cos((ωIF-ωL)t+θIF-θL))/2-
(A(t)D(t)cos((ωIF+ωL)t+θIF+θL))/2+
(nc(t)sin((ωIF-ωL)t+θIF-θL))/2+
(nc(t)sin((ωIF+ωL)t+θIF+θL))/2+
(ns(t)cos((ωIF-ωL)t+θIF-θL))/2-
(ns(t)cos((ωIF+ωL)t+θIF+θL))/2
(6)
εQ=(A(t)D(t)sin((ωIF-ωL)t+θIF-θL))/2+
(A(t)D(t)sin((ωIF+ωL)t+θIF+θL))/2+
(nc(t)cos((ωIF-ωL)t+θIF-θL))/2+
(nc(t)cos((ωIF+ωL)t+θIF+θL))/2+
(ns(t)sin((ωIF-ωL)t+θIF-θL))/2+
(ns(t)sin((ωIF+ωL)t+θIF+θL))/2
(7)
對混頻信號進行積分,積分時長設為T,假設在積分時間內幅度和數據均不變,則積分后的信號為:
(8)
(9)
其中:φ=(ωIF-ωL)t+θIF-θL。NC與NS服從均值為零、方差為(σ2*T)/2的高斯分布。
當只存在真實信號時,鎖相環能夠穩定地跟蹤該信號,鑒相誤差φ趨向于0。因此,I路信號為積分后的數據和噪聲,Q路信號則只有噪聲。上面提到積分后的IQ支路噪聲均服從均值為0、方差為(σ2*T)/2的高斯分布,而在積分時間內數據不會發生變化,因此I路信號服從均值為ADT/2、方差為(σ2*T)/2的高斯分布。I路與Q路標準差理論上相等。
1.2 欺騙信號入侵后的接收信號模型
當欺騙信號進入時,此時跟蹤環路跟蹤到的是欺騙信號與真實信號的復合信號。以下是對復合信號的IQ路分布的分析。
欺騙信號可以表示為:
SS(t)=AS(t)CS(t)DS(t)sin(ωSt+θS)
(10)
其中:AS為欺騙信號幅度,CS為欺騙信號偽隨機碼,DS為欺騙信號數據,ωS為欺騙信號中頻頻率,θS為欺騙信號載波相位。
復合信號為兩個信號的疊加:
S(t)=A(t)C(t)D(t)sin(ωIFt+θIF)+
AS(t)CS(t)DS(t)sin(ωSt+θS)+n(t)
(11)
假設欺騙信號和真實信號碼相位完全對齊,式(11)可簡化為:
S(t)=C(t)D(t)(A(t)sin(ωIFt+θIF)+
AS(t)sin(ωSt+θS))+n(t)
(12)
經過化簡,得出式(13):
S(t)=C(t)D(t)AM(t)cos(ωIFt+θM)+n(t)
(13)
假設AM(t)在積分時間內不變,則解擴、混頻和積分之后的信號為:
(14)

(15)
其中:φM為復合信號與本地信號相位誤差。
以上分析的都是理想情況,實際衛星信號的頻率由于多普勒等因素的影響不是固定值,因此需要設置初始頻偏以及頻率變化率。為了不失一般性,假定頻率變化率按照正弦規律變化[12]。
此時復合信號為:

ωIFt+ωint2t+θS)+n(t)
(16)
式(13)中AM(t)和φM可以寫為:
AM(t)=


1.3 欺騙檢測方法
由于鎖相環能夠跟蹤信號并且實時估計出信號的頻率與相位,因此φM趨向于0。由式(8)和(9)可知,在不存在欺騙信號時,由于衛星到達接收機的功率比較穩定,在一定時間內該支路的方差由噪聲決定,所以I支路信號服從均值為ADT/2、方差為(σ2*T)/2的高斯分布;Q支路只有噪聲,所以該支路服從均值為0、方差為(σ2*T)/2的高斯分布。加入欺騙信號之后,載波頻率的細微差異會造成合成信號幅度AM(t)的振蕩:當Δωt+Δωintt+Δf+Δθ為一常數時,AM(t)在較短時間內不會變化;當Δωt+Δωintt+Δf+Δθ波動時, I支路信號不服從均值為ADT/2、方差為(σ2*T)/2的高斯分布,而Q支路由于鑒相誤差φM趨于零,幅度變化對該支路統計分布影響甚微,所以Q支路依然服從高斯分布。
根據上述分析,可以得出結論,欺騙信號的加入會導致跟蹤環路中的I支路統計規律發生變化,進而導致I和Q支路積分值的分布統計值不相等。本文依據此原理鑒別接收機是否受到欺騙。
式(14)(15)可以簡化為:
SIC(t)=(AM(t)DT+NS)/2
(17)
SQC(t)=Nc/2
(18)
分別對式(17)和(18)的積分值求統計分布,統計一段時間內多個積分值的分布。如式(19)和式(20)所示:
(19)
(20)
其中:Ii和Qi為I路和Q路積分值,N為該段時間內積分值個數,mI和mQ分別為I路與Q路積分值在該段時間內的平均值,然后進行式(19)和式(20)的計算,得到兩路的分布統計值I_std和Q_std。利用式(21)進行判決:

(21)
其中1-γ和1+γ為閾值。當式(21)成立時,判定接收機未受到欺騙,反之則受到欺騙。
流程如圖2所示。
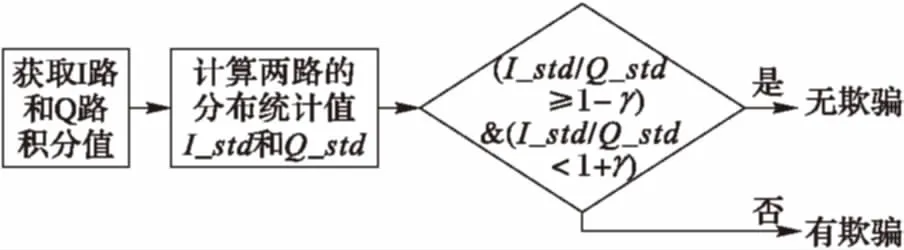
圖2 欺騙檢測方法流程
2 仿真驗證
2.1 仿真參數設置
本次仿真使用已調制數據的鎖相環,使用科斯塔斯環(Costas)中的atan鑒相方式。仿真環境為Matlab。由于由衛星帶來的頻率變化率不超過0.93 Hz/s,對于低動態用戶,假設其頻率變化率為2 Hz/s,則接收信號的載波頻率相對于本振的變化率大致為3 Hz/s。
具體參數設置如表1。
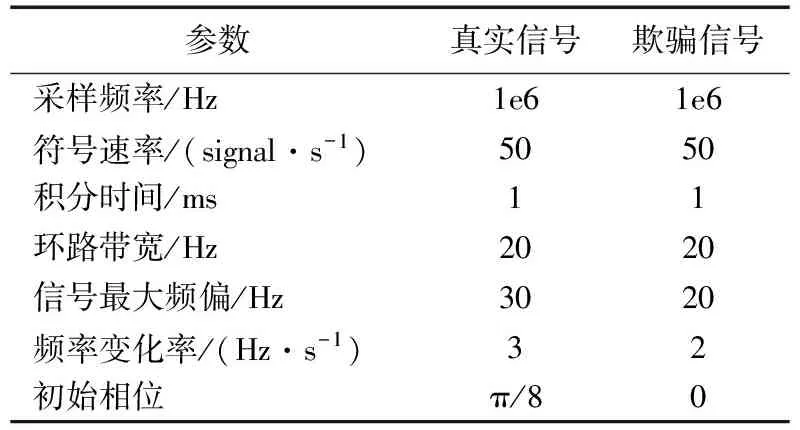
表1 仿真參數設置
2.2 仿真結果分析
使用Matlab工具對所提方法進行仿真。由于式(8)中的φ在0附近波動,所以I與Q路的積分值的標準差并不是嚴格意義上相等。文獻[1]中指出,室外接收導航信號的載噪比一般為35 dB·Hz~55 dB·Hz,大于40 dB·Hz的視為強信號,小于28 dB·Hz的視為弱信號。根據實際情況,本文仿真載噪比范圍確定為20 dB·Hz~60 dB·Hz。圖3為虛警概率與載噪比和門限的關系,載噪比在26 dB·Hz以上時,0.1~0.2的閾值虛警概率極小;經過實驗數據分析,最終確定閾值為(1±0.1)。

圖3 虛警概率與載噪比和門限的關系
在信號載噪比處于正常情況時(28 dB·Hz~50 dB·Hz),固定載噪比,理論上檢測概率隨干信比的增大而增大。在欺騙信號與真實信號的干信比在接收機不易察覺的范圍內(-10 dB~10 dB),固定干信比,理論上檢測概率隨載噪比的增加而增加。圖4為不同載噪比、不同干信比條件下的仿真結果。仿真條件設置為:載噪比在22 dB·Hz~30 dB·Hz,干信比在-3 dB~7 dB。進行1 000次蒙特卡洛仿真。仿真結果表明,檢測概率隨信噪比和載噪比的增大而提高。
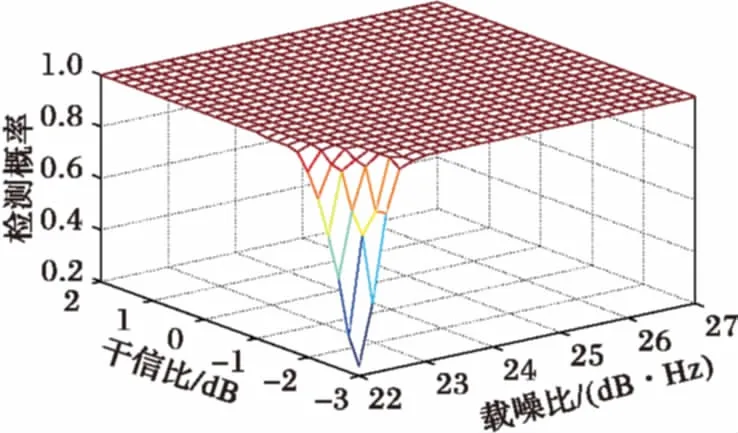
圖4 檢測概率與載噪比和干信比的關系
虛警概率指沒有欺騙信號判定為存在欺騙信號。當不存在欺騙信號時,虛警概率在正常載噪比范圍內(28 dB·Hz~50 dB·Hz)隨載噪比的增大而減小。載噪比在28 dB·Hz以上時,在2%的虛警概率下能夠獲得100%的檢測概率。仿真結果如圖5。仿真條件設置為:載噪比在3 dB·Hz~73 dB·Hz。進行1 000次蒙特卡洛仿真。在載噪比超過正常接收范圍并且繼續增大時,虛警概率呈現上升的態勢。過高的信噪比使噪聲對I、Q支路的統計特性影響甚微,兩支路將受到信號本身的波動的影響,不服從噪聲的統計特性,從而增大虛警概率。
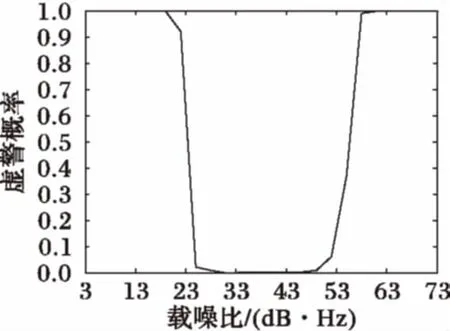
圖5 虛警概率隨載噪比變化的趨勢
圖6和圖7為本文所提方法與文獻[13]中方法的比較。結果表明,在固定載噪比(24 dB·Hz)的情況下,隨著干信比的增大,檢測概率增大,本文所提方法檢測性能優于文獻[13]所提方法;在固定干信比(-2 dB)的情況下,隨著載噪比的增大,檢測概率增大,本文所提方法的檢測性能亦優于文獻[13]方法。
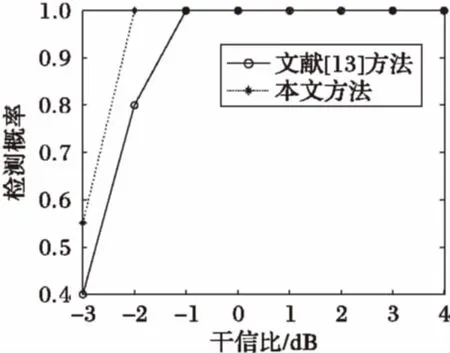
圖6 兩種方法的檢測概率隨干信比的變化
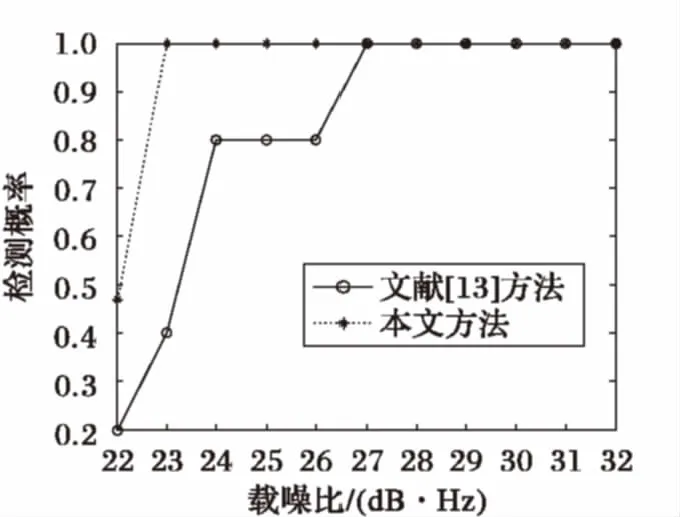
圖7 兩種方法的檢測概率隨載噪比的變化
3 結語
本文通過研究載波跟蹤環路I、Q路積分值的統計特性,提出一種基于跟蹤環路統計特性分析的檢測方法。該方法在室外正常接收載噪比范圍內(28 dB·Hz~50 dB·Hz)可以有效地檢測欺騙信號;并且與已有方法相比較,本文所提方法的檢測性能有了一定程度的提升。
但是該方法也存在一定的不足。首先,文章只是在載波層面進行分析,假設碼已經完全對齊,在實際接收機中碼和載波是相互耦合的,碼的對齊程度也在一定程度上會對信號的功率產生影響;其次,本方法適應于載波頻率不同時的欺騙檢測,當欺騙信號與真實信號同頻同相時,無法檢測是否存在欺騙;最后,該方法的提出建立在沒有多徑的基礎上,現實環境中,多徑會增大虛警概率。
References)
[1] 相飛.衛星導航接收機干擾及多徑抑制方法研究 [D].西安:西安電子科技大學,2013:1-2.(XIANG F. Interference suppression and multipath mitigation methods for GNSS receivers[D]. Xi’an: Xidian University, 2013: 1-2.)
[2] 謝鋼.GPS原理與接收機設計[M].北京:電子工業出版社,2009:241-251.(XIE G. GPS Principle and Receiver Design [M]. Beijing: Publishing House of Electronics Industry, 2009: 241-251.)
[3] 胡源.導航戰中的GPS干擾研究[J].空間電子技術,2009, 6(4): 48-52.(HU Y. Research of GPS jamming in navigation warfare [J]. Space Electronic Technology, 2009, 6(4): 48-52.)
[4] LEDVINA B M, BENCZE W J, GALUSHA B, et al. An in-line anti-spoofing device for legacy civil GPS receivers [C]// Proceedings of the 2010 International Technical Meeting of the Institute of Navigation. Manassas, VA: The Institute of Navigation, 2010: 698-712.
[5] 黃龍,呂志成,王飛雪.針對衛星導航接收機的欺騙干擾研究[J].宇航學報,2012,33(7):884-890.(HUANG L, LYU Z C , WANG F X. Spoofing pattern research on GNSS receivers [J]. Journal of Astronautics, 2012, 33(7): 884-890.)
[6] HUMPHREYS T E, LEDVINA B M, PSIAKI M L, et al. Assessing the spoofing threat : development of a portable GPS civilian spoofer [C]// Proceedings of the 21st International Technical Meeting of the Satellite Division of the Institute of Navigation. Manassas, VA: The Institute of Navigation, 2008: 2314-2325.
[7] KIM T H, SIN C S, LEE S. Analysis of effect of spoofing signal in GPS receiver [C]// Proceedings of the 2012 12th International Conference on Control, Automation and Systems. Piscataway, NJ: IEEE, 2012: 2083-2087.
[8] BITNER T, PRESTON S, BEVLY D. Multipath and spoofing detection using angle of arrival in a multi-antenna system [C]// Proceedings of the 2015 International Technical Meeting of the Institute of Navigation. Manassas, VA: The Institute of Navigation, 2015: 822-832.
[9] DEHGHANIAN V, NIELSEN J, LACHAPELLE G. GNSS spoofing detection based on receiver C/N0 estimates [C]// Proceedings of the 25th International Technical Meeting of the Satellite Division of the Institute of Navigation. Manassas, VA: The Institute of Navigation, 2012: 2878-2884.
[10] CARSON N, BEVLY D. A robust method for spoofing prevention and position recovery in attacks against networked GPS receivers [C]// Proceedings of the 2015 International Technical Meeting of the Institute of Navigation. Manassas, VA: The Institute of Navigation, 2015:623-632.
[11] PSIAKI M L, O’HANLON B W, POWELL S P, et al. GNSS spoofing detection using two-antenna differential carrier phase [C]// Proceedings of the 27th International Technical Meeting of the Satellite Division of the Institute of Navigation. Manassas, VA: The Institute of Navigation, 2014: 2776-2800.
[12] BROUMANDAN A, JAFARNIA-JAHROMI A, DEHGHANIAN V, et al. GNSS spoofing detection in handheld receivers based on signal spatial correlation [C]// Proceedings of the 2012 IEEE/ION Position Location and Navigation Symposium. Piscataway, NJ: IEEE, 2010: 479-487.
[13] 趙陸文,繆志敏,張北江,等.一種新的衛星導航跟蹤段欺騙攻擊檢測方法[J].宇航學報,2015,36(10):1172-1177.(ZHAO L W, MIAO Z M, ZHANG B J, et al. A novel spoofing attack detection method in satellite navigation tracking phase [J]. Journal of Astronautics, 2015, 36(10): 1172-1177.)
Spoofingdetectionmethodofcarriertrackingloopstatisticalpropertyanalysis
LIU Dinghao*, LYU Jing, SUO Longlong, HU Xiangyu
(CollegeofCommunicationEngineering,PLAUniversityofScienceandTechnology,NanjingJiangsu210007,China)
Since most of the spoofing detection methods working in the satellite navigation receiver tracking phase can only detect one spoofing signal transmitted from single source, a novel spoofing detection method based on the statistical property analysis of carrier tracking loop was proposed. Firstly, the shortcomings of the existing spoofing detection methods were analyzed. Secondly, the
signal model under the spoofing attack environment was established and the statistical character of the complex signal which composites the real and spoofing signals was analyzed. Theoretical analysis shows that when the frequencies of the spoof signal and real signal are different, the novel algorithm can detect the spoofing signal since the I-branch signal’s amplitude is not stable. The simulation results show that the proposed method can achieve 100% detection probability under 2% false alarm probability when the carrier-to-noise ratio of the received signal in the normal range (28 dB·Hz to 50 dB·Hz). By using the proposed algorithm , the spoofing signals transmitted from different sources can be detected, and the performance is greatly improved compared with the existing methods (about 1 dB under the same carrier-to-noise ratio, and about 4 dB under the same interference-to-signal ratio).
Global Navigation Satellite System (GNSS); spoofing detection; phase lock loop; statistical property
2017- 03- 20;
2017- 06- 05。
國家自然科學基金資助項目(61601511)。
劉丁浩(1992—),男,山東青島人,碩士研究生,主要研究方向:衛星導航抗欺騙技術; 呂晶(1965—),男,天津人,教授,碩士,主要研究方向:衛星通信、衛星導航; 索龍龍(1989—),男,陜西寶雞人,博士研究生,主要研究方向:衛星導航、衛星通信; 胡相譽(1989—),男,山東濟南人,碩士研究生,主要研究方向:衛星導航。
1001- 9081(2017)09- 2507- 05
10.11772/j.issn.1001- 9081.2017.09.2507
TN967.1
A
This work is partially supported by the National Natural Science Foundation of China (61601511).
LIUDinghao, born in 1992, M.S. candidate. His research interests include anti-spoofing technology of satellite navigation.
LYUJing, born in 1965, M. S., professor. His research interests include satellite communication, satellite navigation.
SUOLonglong, born in 1989, Ph. D. candidate. His research interests include satellite navigation, satellite navigation.
HUXiangyu, born in 1989, M.S. candidate. His research interests include satellite navigation.
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
海峽科技與產業(2016年3期)2016-05-17 04:32:12
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
Coco薇(2015年1期)2015-08-13 02:47:34