永磁同步電機系統神經網絡逆解耦控制
2017-11-13 08:34:08劉欣歡徐桂芝
河北工業大學學報 2017年5期
劉欣歡,徐桂芝,劉 旭
(河北工業大學 電氣工程學院,天津 300132)
永磁同步電機系統神經網絡逆解耦控制
劉欣歡,徐桂芝,劉 旭
(河北工業大學 電氣工程學院,天津 300132)
提出了一種應用于全速域范圍內的表貼式永磁同步電機神經網絡逆解耦控制策略,該策略能夠實現電機的精確解耦控制以及良好的動靜態性能.在證明電機系統可逆性的基礎上,對全速域范圍內的線性化解耦控制特性進行了分析,針對逆解耦控制策略過于依賴系統數學模型的缺點,提出神經網絡逆解耦控制策略,并設計了基于滑模變結構的附加轉速與電流控制器.以一臺5.2 kW永磁同步電機為被控對象進行仿真以及實驗研究,結果表明,此策略能夠在全速域范圍內實現電機良好的解耦控制,并能夠獲得較好的動靜態性能.
永磁同步電機;神經網絡;逆系統;解耦控制;滑模控制
0 引言
永磁同步電機具有體積小、損耗小、可靠性高、效率高、功率因數高、性能優良等優點,在電動汽車、數控機床等領域得到了廣泛的應用[1].隨著工業化進程的加速,對PMSM系統的要求不再局限于額定工況,而是希望電機能夠在基速以下和基速以上全速域范圍內運行.目前,將弱磁控制和過調制策略相結合是實現電機基速以上運行的有效方法[2-3].
弱磁控制是通過增大定子直軸去磁電流,利用直軸電樞反應削弱電機的氣隙磁場,進而等效的減弱勵磁磁場來達到弱磁增速的目的.過調制通過增加逆變器輸出的基波電壓幅值,增大直流母線電壓的利用率,從而達到擴大電機調速范圍的目的.
解耦控制是實現永磁同步電機系統高性能靜態特性和動態特性的關鍵,經常使用的解耦控制包括直接轉矩控制、矢量控制以及逆系統線性化解耦控制等[4].矢量控制和直接轉矩控制對電機的模型參數依賴性較強,在負載擾動和電機參數變化時很難實現電機系統的良好的解耦特性.
逆系統解耦控制方法是通過構造逆系統,將被控對象補償為具有線性傳遞關系的系統,具有直觀形象,易于理解的優點.但由于逆系統的構建在很大程度上依賴被控電機的數學模型以及模型中電機的參數,因此該方法存在一定的局限性.文獻 [5]應用逆系統方法對永磁同步電機進行解耦控制研究,能夠實現電機轉速和轉矩的基本解耦,但是當電機啟動和負載突變時系統的動態性能不佳.
神經網絡具有很強的容錯性、魯棒性和非線性映射能力,能夠逼近任意非線性函數,將神經網絡引入逆系統解耦控制中,能夠兼顧兩者的優點,實現系統的精確解耦以及高性能控制.文獻 [6]中應用基于神經網絡的逆系統解耦控制方法對感應電機進行控制,即通過靜態神經網絡以及積分器一起來逼近電機逆系統,并與原系統串聯組成偽線性系統,從而使用線性控制方法對感應電機進行控制,該控制策略對模型參數的變化及負載擾動有較強的魯棒性.文獻 [7]將神經網絡逆控制策略應用于無刷直流電機中,該方法對負載擾動與電機參數攝動有較強的魯棒性.
本文將神經網絡逆解耦控制策略應用于永磁同步電機系統,將電機系統動態解耦為二階轉速子系統和一階電流子系統,以實現永磁同步電機系統的精確解耦以及高性能控制.同時設計了滑模附加轉速與電流控制器,結合神經網絡逆系統構成復合控制器,實現電機系統基速以下和基速以上全速域范圍內的控制,并通過仿真和實驗結果驗證了本文所提策略的有效性.
1 永磁同步電機的模型及其可逆性分析
1.1 永磁同步電機弱磁過調制控制
基速以下時,表貼式永磁同步電機轉速和轉矩的關系為[8]

通過式(1)可知,電機運行于基速以上狀態時,要提高電機的轉速需要采用弱磁控制或者過調制控制方法.弱磁控制方法采用電壓外環反饋補償控制策略.基速以下運行時,采用id=0的控制方法;基速以上運行時,當電機的端電壓大于逆變器的電壓極限值時,需要通過增大定子直軸去磁電流,從而削弱氣隙磁場,即弱磁控制的方法來擴大電機的調速范圍.
如圖1所示為空間矢量調制策略(Space Vector Pulse Width Modulation,SVPWM) 過調制區域示意圖.圖中六邊形內切圓為采用正弦SVPWM調制策略時輸出的電壓矢量范圍,為增加逆變器輸出的基波電壓幅值,需要采用SVPWM過調制策略,即將輸出的電壓矢量范圍從內切圓擴大至六邊形上,從而達到擴大電機調速范圍的目的.
圖1中電壓矢量U0至U7分別為兩電平逆變器輸出的8個電壓矢量,其中U1至U6為非零電壓矢量,U0和U7為零電壓矢量.圖中的斜線區域對應的是過調制1區,當參考電壓矢量Ur的軌跡位于此區域時,保持矢量相位不變,對應的矢量幅值縮減至圖中由粗黑線圍成的六邊形上;外面的位于六邊形和圓之間的I至VI區域對應過調制2區,當參考電壓矢量Ur的軌跡位于此區域時,逆變器輸出的電壓矢量分別為U1至U6.
1.2 數學模型及可逆性分析
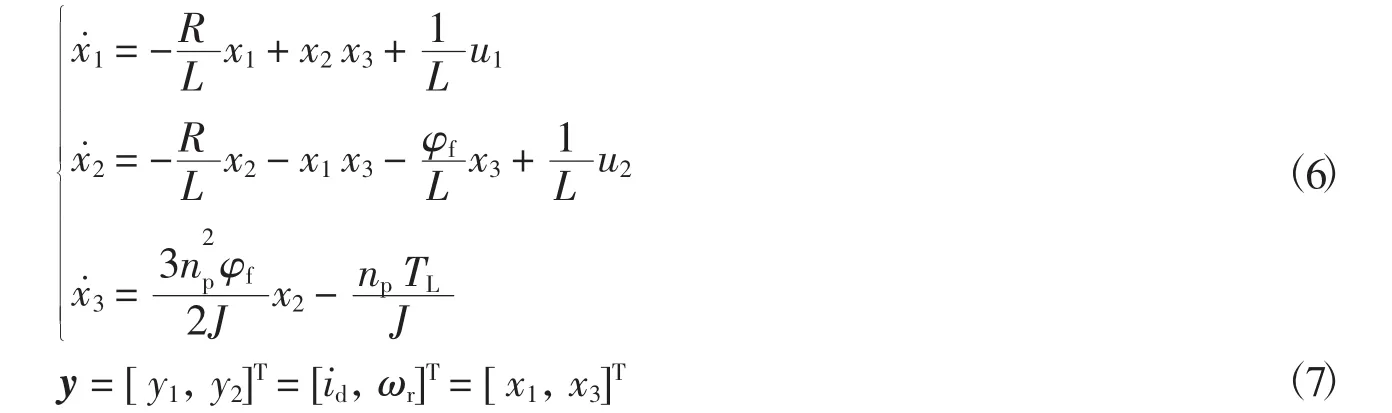
假設PMSM磁路未飽和,粘滯摩擦系數B=0,忽略磁滯損耗和渦流損耗,表貼式永磁同步電機在兩相旋轉坐標系下的微分方程為
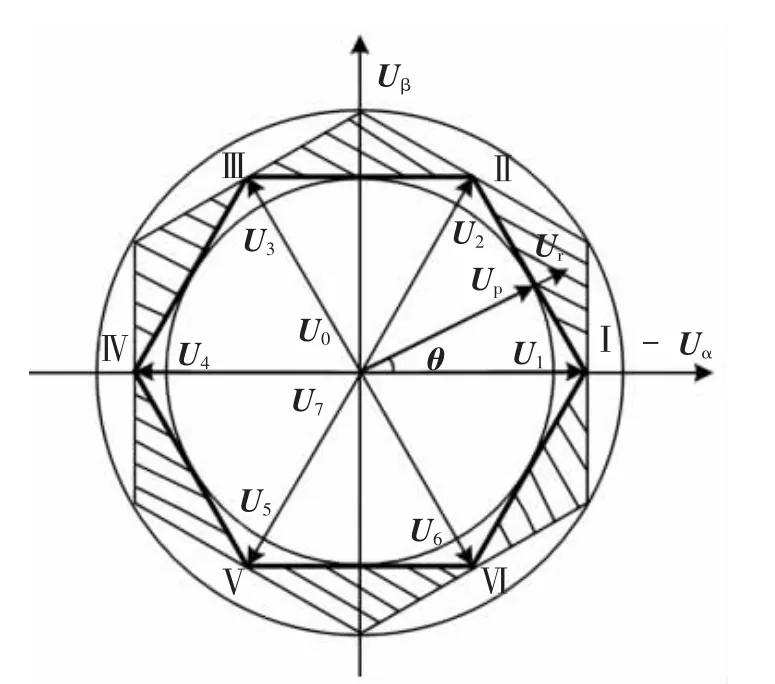
圖1SVPWM過調制區域示意圖Fig.1 Over-modulation region of PMSM

式中:ud、uq分別為定子電壓的d軸和q軸分量;id、iq分別為定子電流的d軸和q軸分量;R為定子電阻;J為轉動慣量;TL為負載轉矩.
在基速以下時,采取id=0的控制方式;在基速以上時,采取id<0的控制方式.因此為了實現全速域范圍內的控制,本文選取定子直軸電流id和電機電角速度ωr作為系統的輸出,那么系統的輸出變量、狀態變量、輸入變量分別如下

永磁同步電機系統可以等價為一個兩輸入兩輸出的三階非線性系統,采用Interactor算法對該系統進行可逆性證明.
系統的狀態方程、輸出方程分別為
對系統的輸出變量y不斷進行求導,直至其導數中出現輸入變量u,求導停止,下面先對y1求時間的導數

由式(8)可以看出,y1的一階導數已經出現了u.使Y1=y(11),此時可以求得Y1對u的雅克比矩陣為

式(9)中雅克比矩陣的秩為1,即該矩陣滿秩,即α1=rank(?Y1/?u)=1,接著對y2求時間的導數,其一階導數為

由式(10)可以看出 y(21)中沒有出現u,因此對y(21)求時間的導數,如式(11)所示

由式(11)可以看出,y2的二階導數此時可以求得Y2對u的雅克比矩陣為

式(12)中雅克比矩陣的秩為2,即該矩陣滿秩,即α2=rank[A(x)]=2.其矢量相對階:α=[α1,α2]T=[1,2]T,存在如下關系式α1+α2=3=n,式中n表示x的維數,由此可知永磁同步電機系統不存在隱動態.經以上證明,PMSM系統是可逆的.
可求得表貼式永磁同步電機逆系統的解析表達式為

所以逆系統可表示為

根據線性控制理論,對式(13)描述的系統進行閉環控制,電流子系統屬于一階系統,可采用PI控制器;轉速子系統屬于二階系統,可采用PD控制器.
1.3 過調制策略下系統的可逆性分析
當電機運行于基速以上時,需采用過調制策略來擴大電機的調速范圍,此時將永磁同步電機和逆變器看做一個整體,并忽略逆變器的時滯,分析此時系統的可逆性.
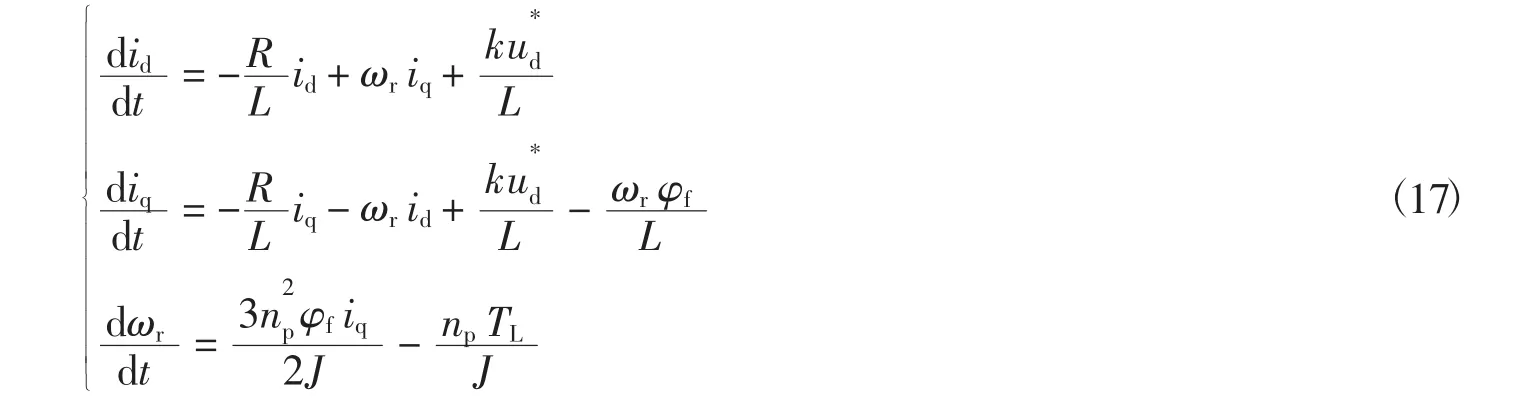
由圖1可知,永磁同步電機的d、q軸的實際電壓值與給定d、q軸電壓值的數學關系式為

式中:u*d、u*q分別為逆變器d軸和q軸給定電壓;k為滿足關系式k≤1的常數.當參考電壓矢量位于圖1中黑色六邊形內部時,k=1;當參考電壓矢量位于由粗黑線圍成的六邊形外部時,k<1.將式(15)和式(16) 代入式 (2),可以得到

基于逆系統的永磁同步電機系統線性化解耦控制框圖如圖2所示.
2 永磁同步電機系統神經網絡逆解耦控制
2.1 逆系統解耦控制策略解耦特性分析
電機在基速以下運行時,忽略電機鐵心損耗、磁路飽和等因素條件下,逆系統的解析表達式如式(13),此時解析逆系統與電機系統組成的偽線性系統是線性的,此時整個控制系統可以獲得較好的動靜態性能.
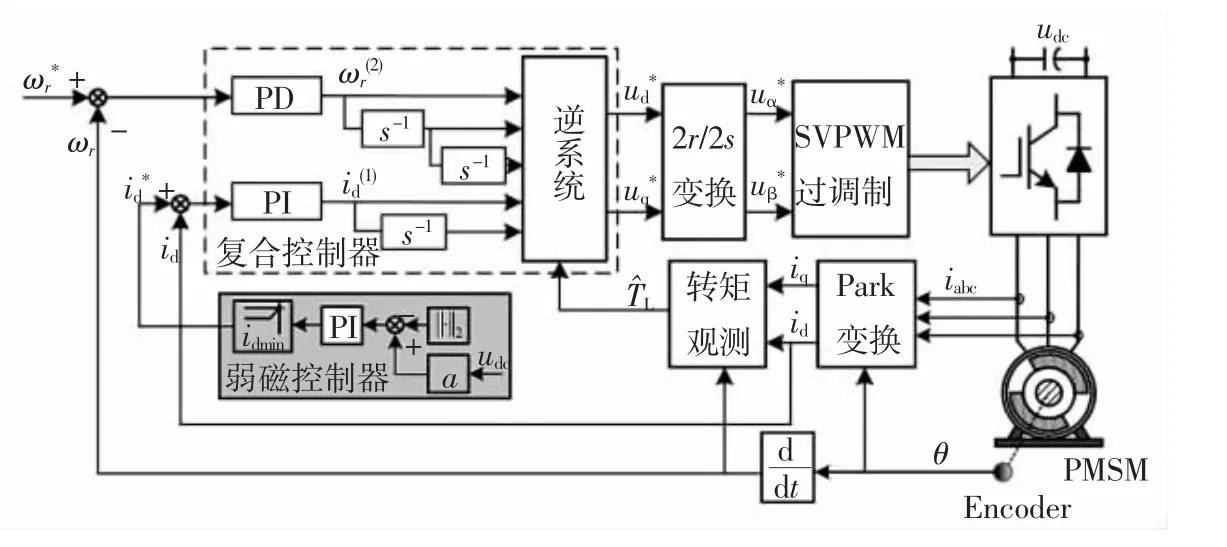
圖2 基于逆系統的PMSM系統線性化解耦控制框圖Fig.2 Block decoupling control scheme of PMSM system based on inverse system
電機在基速以上過調制策略下運行時,k=|Up|/Ur|,系數k的取值是一個與參考矢量Ur的幅值大小和相位有關的非線性函數,可知在弱磁過調制工況下增大了系統的非線性程度以及耦合性.
逆系統方法依賴于非線性系統的精確數學模型和逆系統的解析表達式,因此存在電機參數變化的魯棒性和適應性不理想,抗負載擾動能力不強等缺點.
2.2 控制系統框圖
圖3為基于復合控制的永磁同步電機系統框圖.圖中的灰色陰影區域分別表示附加滑模控制器、神經網絡逆系統、弱磁控制器以及SVPWM過調制模塊,虛線框內為由附加滑模控制器和神經網絡逆系統構成的復合控制器.
2.3 神經網絡逆系統的構建
神經網絡逆系統由靜態神經網絡和積分器兩部分構成,分別表征神經網絡逆系統的靜態特性和動態特性,從而實現動態神經網絡的功能.將神經網絡逆系統和永磁同步電機原系統串聯起來可以得到兩個獨立的偽線性子系統,包括具有二階線性積分關系的轉速子系統與具有一階線性積分關系的電流子系統.神經網絡逆系統的基本結構如圖4所示.
用于逼近未知非線性函數的靜態神經網絡選用3層BP神經網絡,節點數分別選為:輸入節點6個,輸出節點2個,隱含節點通常選為輸入節點的兩倍,經過仿真設為12個.輸入向量為 [id,id′,ωr,ωr′,ωr″,TL]T,輸出向量為[ud,uq]T,選取的隱含層神經元的激勵函數為雙曲正切函數,輸出層神經元的的激勵函數為線性閾值函數.

本文所用的靜態神經網絡采用離線訓練的方法來獲取,首先需要進行輸入輸出數據的采集,采用以PID附加控制器的PMSM解析逆系統來對本文所需數據進行采集,進行數據采集的PMSM系統結構圖如圖5所示.
為了保證神經網絡有較好的泛化能力,應該選取足夠的激勵信號作為解析逆系統的輸入信號,轉速和電流的給定值應取覆蓋電機的整個工作區域的隨機量,本文仿真中轉速給定信號和電流給定信號為范圍分別為0~80 r/min、-10~1A的隨機方波信號,每一個轉速給定信號與電流給定信號持續時間為1s,采樣頻率為10kHz,以保證數據中包含足夠的穩態與瞬態信息,信號平滑濾波后閉環采集數據 {id,id′,ωr,ωr′,ωr″,TL} 和{ud,uq}. 然后對獲得的數據進行歸一化處理,其中的2/3的數據作為訓練樣本集,剩下1/3的數據作為檢驗樣本集,用來檢驗模型的泛化能力.為加快神經網絡的訓練速度,本文采用帶動量項和變學習速率的改進型BP算法對神經網絡進行訓練,直到取得滿意的精度為止.
轉速環采用PD控制,含有微分環節,考慮到微分項會在實驗過程中引進噪聲,并且在本文實驗平臺下,程序中控制周期較大為 100 μs,會造成微分項 ωr′的計算不準確.在忽略電機摩擦系數時,注意到電機的轉矩和轉速加速度之間存在如式(20)所示的關系式,轉速的一階導數ωr′可以通過式(20) 求得.
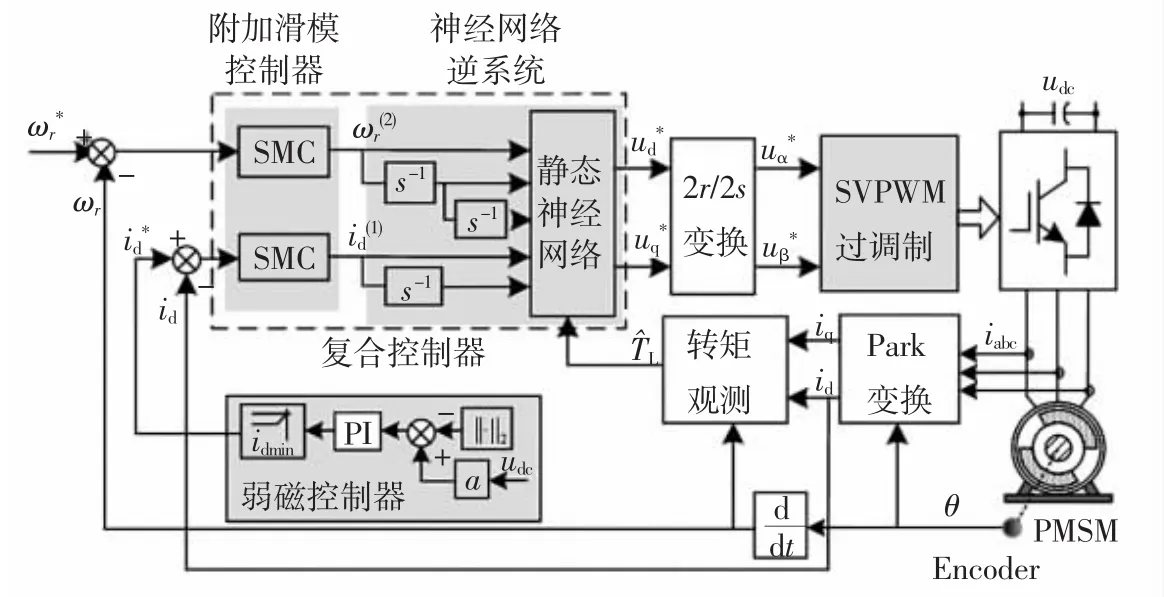
圖3 基于復合控制的PMSM系統框圖Fig.3 Block diagram of PMSM system based on compound control
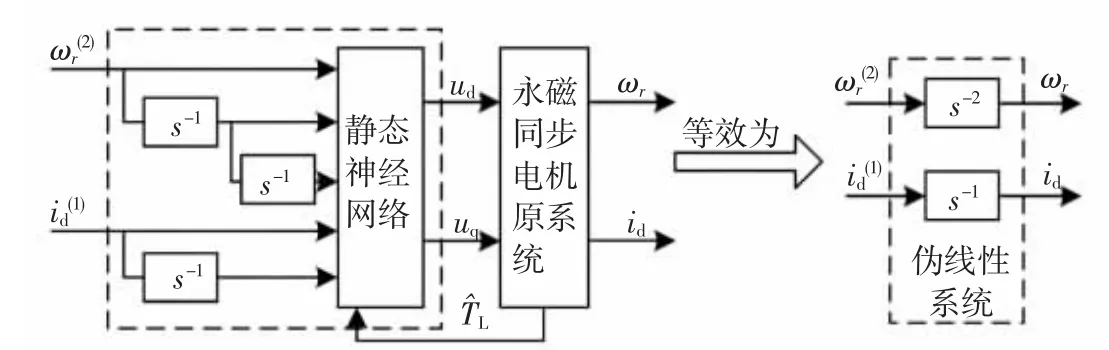
圖4 神經網絡逆系統的基本結構Fig.4 Radical structure of neural network inverse system
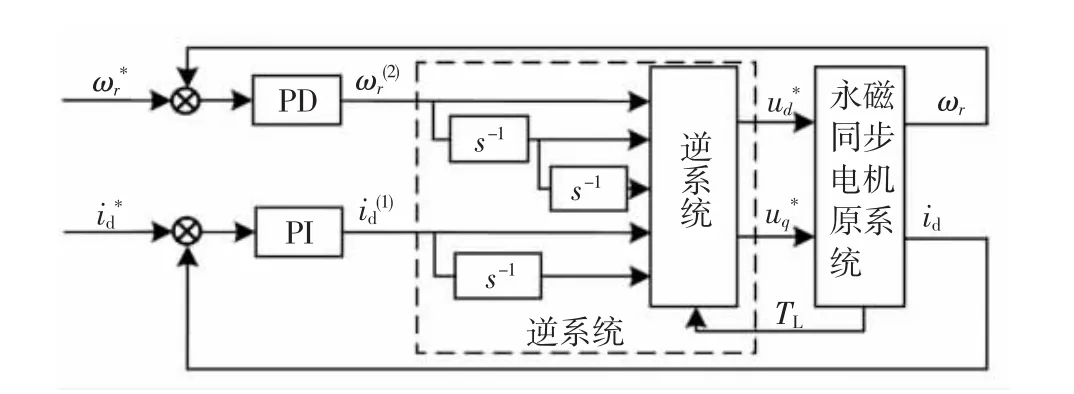
圖5 神經網絡訓練數據采集的逆系統控制結構圖Fig.5 Inverse system control structure diagram of the neural network training data acquisition

2.4 附加滑模控制器的設計
滑模變結構控制具有算法簡單、響應速度快以及魯棒性強等優點,被廣泛的應用于電機系統控制領域當中.本文設計了基于滑模變結構的附加轉速與附加電流控制器對電機系統進行閉環控制,來提高系統的動靜態性能.
本文設計了基于新型指數趨近律的滑模變結構附加控制器來分別對二階轉速子系統和一階電流子系統進行閉環控制.本文在常規指數趨近律的基礎上,提出了一種新型指數趨近律
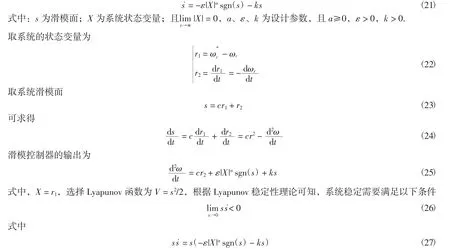
其中,ε、k都是大于零的常數,因此滿足穩定性條件,即在新趨近律滑模控制下系統是穩定的.
考慮到系統的快速性以及穩態誤差,這里設計k為轉速誤差絕對值的非線性函數,如圖6所示為變k流程圖,圖中x1為速度誤差絕對值;ni為給定的比較值,n1<n2<…<ni;ki為通過比較后選擇的值,相應的有k0<k1<…<ki.
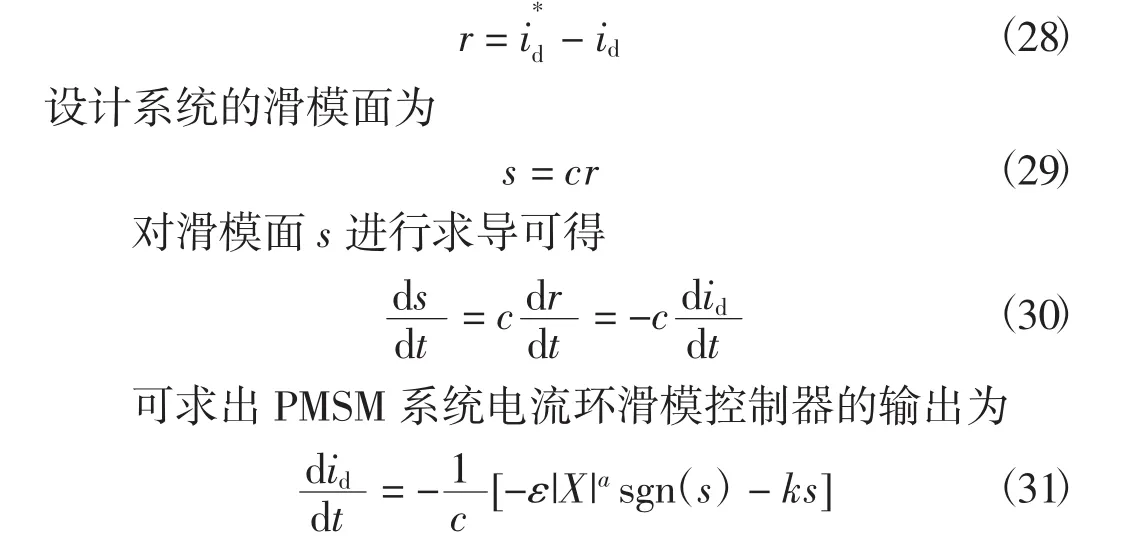
對電流環進行設計,選取系統狀態變量為
2.5 轉矩觀測器的設計
在靜態神經網絡的輸入 {id,id′,ωr,ωr′,ωr″,TL}和上文中轉速一階導數的計算中均用到了轉矩的值,因此需要對負載轉矩進行觀測.本文采用負載轉矩滑模觀測器對負載轉矩進行觀測.
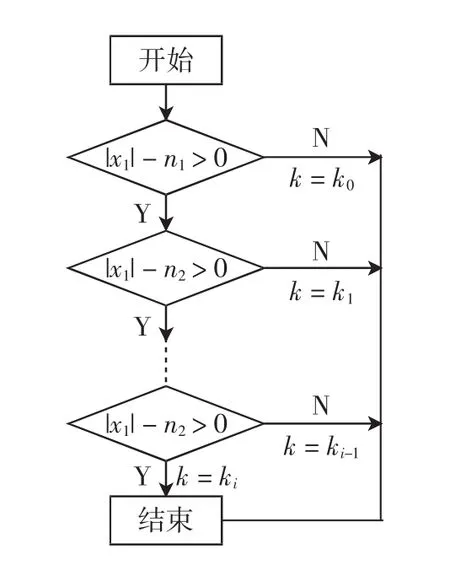
圖6 變k流程圖Fig.6 The flow chart of the variable k
忽略摩擦系數,將TL作為PMSM系統的擴展狀態變量,可構建得到永磁同步電機狀態方程為

由于系統的控制周期較小,可以假設在一個控制周期內負載轉矩是不變的,即T˙L=0,那么建立永磁同步電機系統的滑模狀態觀測器如下

式中:U=k sgn(ω?r-ωr),k、g均為常數,分別為滑模和反饋增益;T?L、ω?r分別為負載轉矩和電角速度的估計值,將上述兩式作差,可知滑模觀測器的誤差方程為

式中:e1=ω?r-ωr為電機轉速的估計誤差;e2=T?L-TL為負載轉矩的估計誤差.定義滑模面s=e1=ω?r-ωr,根據廣義滑模條件的可達條件ss˙≤0可得

在滑動模態時存在關系式s=s˙=0,此時式(34)可化簡為

根據式(36)可以求出負載轉矩誤差方程為

式中,c為常數,系統的穩定性條件為-gnp/J>0,即g<0,系統的趨近速度由反饋增益g來決定.圖7為負載轉矩滑模觀測器的結構框圖.
由圖7觀測得到的電機的負載轉矩作為神經網絡的輸入量,圖中觀測得到的轉速的一階導數作為上述附加轉速滑模控制器的輸入.
3 仿真分析
本節采用Matlab/Simulink平臺對基速以下和基速以上兩種工況下的神經網絡逆解耦控制進行了仿真分析.給定直流母線電壓值為450 V,仿真所用的永磁同步電機參數如表1所示.
本文中負載轉矩給定最大值為150 Nm,選取轉矩為150 Nm時電機能達到的最大轉速為基速,根據式(1)可求得基速為n0=63.3 r/min.電機在空載運行狀態的最高轉速為63.4 r/min,為了保證PMSM運行于弱磁過調制區,在基速以上工況下的仿真中轉速給定值為70 r/min.
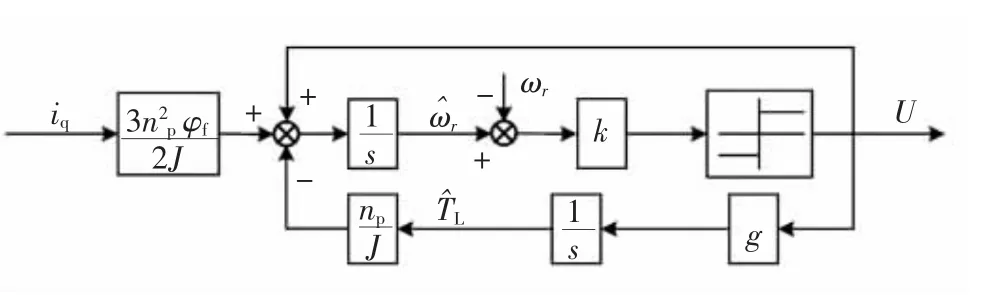
圖7 負載轉矩滑模觀測器的結構框圖Fig.7 The structure diagram of load torque sliding mode observer
表1 電機參數Tab.1 Parameters of The Tested motor
基速以下的仿真中,電機參考轉速為30 r/min,啟動時電機負載為0 N·m,后突變為150 N·m.圖8給出了基速以下時逆系統解耦控制和神經網絡逆解耦控制策略仿真波形對比,圖中依次給出了轉矩、轉速波形.
基速以上的仿真中,電機參考轉速為70 r/min,啟動時電機負載為0 N·m,后突變為150 N·m.圖9給出了基速以上時逆系統解耦控制和神經網絡逆解耦控制策略仿真波形對比,圖中依次給出了轉矩、轉速波形.
對比圖8a)和圖8b),圖9a)和圖9b) 可以看出,在基速以下和基速以上兩種工況下,逆系統解耦控制策略在突加負載過程中,轉矩和轉速均有較大的抖動,系統的抗負載干擾能力不強,永磁同步電機系統的動態性能不佳.采用神經網絡逆解耦控制策略時,突加負載過程中轉矩波動很小,轉速基本沒有變化,系統的動態性能良好,因此神經網絡逆解耦控制策略能在全速域范圍內有效的改善系統的動態性能.
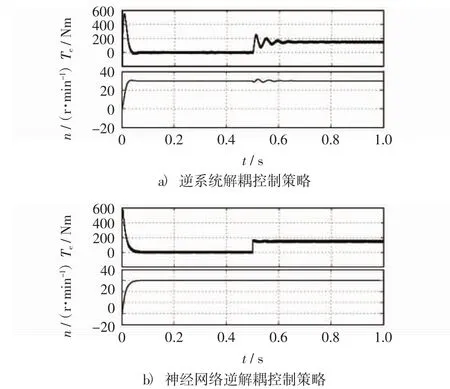
圖8 基速以下不同控制策略下系統仿真結果Fig.8 Simulation results of different control strategies below the base speed
4 實驗結果
本文采用了一臺5.2 kW永磁同步電機,分別在逆系統解耦控制和神經網絡逆解耦控制兩種控制策略下對電機進行實驗,并對實驗結果進行了對比分析.控制電路的主控芯片為浮點型TMS320F28335 DSP,協控制芯片為Cycone系列FPGA.系統的采樣周期為100 μs,開關頻率為5 kHz,實驗電機參數如表1所示.
為了分析系統的動態性能,分別對突加負載和轉速突變2種情況進行了實驗分析.在突加負載的實驗中,電機參考轉速為30 r/min,啟動時電機負載為0 N·m,后突變為150 N·m.圖10給出了突加負載時逆系統解耦控制和神經網絡逆解耦控制策略下的實驗波形對比結果,從上至下依次為轉矩、轉速波形.
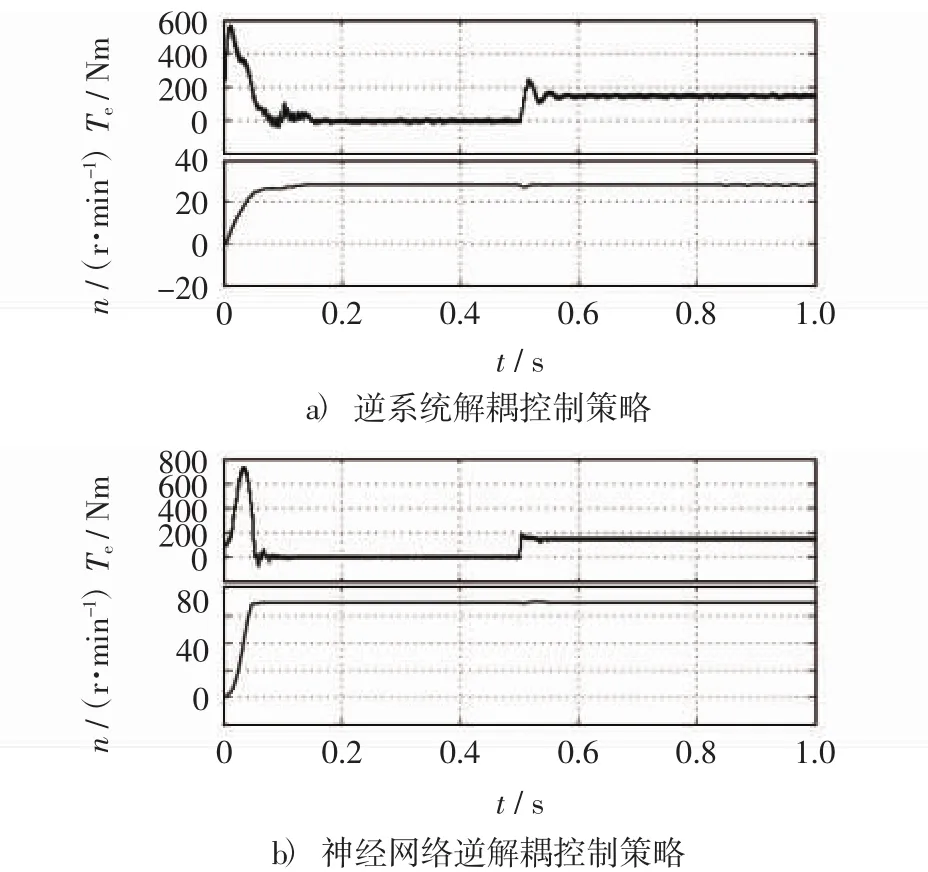
圖9 基速以上不同控制策略下系統仿真結果Fig.9 Simulation results of different control strategies above the base speed
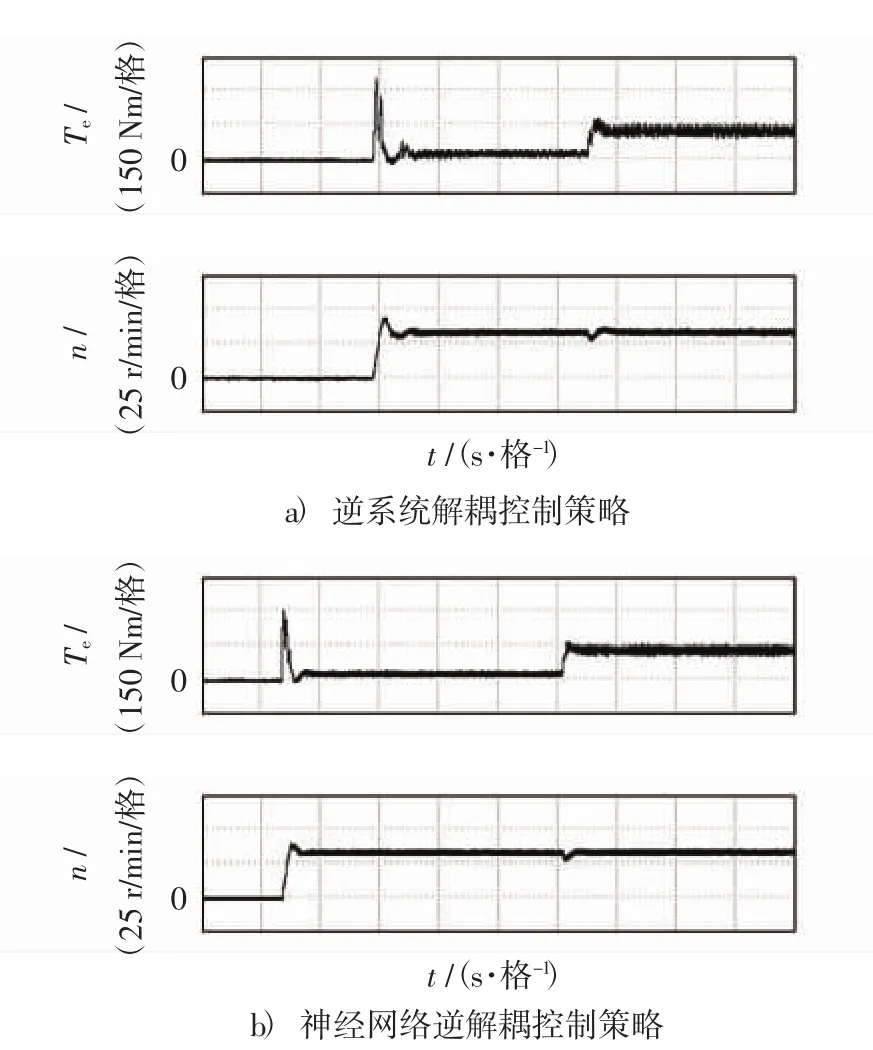
圖10 突加負載時不同控制策略下系統實驗結果Fig.10 Experiment results of different control strategies under sudden loading
在轉速突變的實驗中,啟動時電機轉速給定值為30 r/min,后突變為40 r/min,電機負載轉矩初始給定值為150 N·m,由于在本文實驗中負載電機定子兩端接的是阻感負載,因此在轉速突變時負載電機的定子端電壓會發生突變,進而電流會變化,負載轉矩也會變化.圖11給出了轉速突變時逆系統解耦控制和神經網絡逆解耦控制策略下的實驗波形對比結果,從上至下依次為轉矩、轉速波形.
由圖11可以看出,采用逆系統解耦控制策略時,電機在空載啟動時系統的轉矩和轉速抖動較大,在帶載啟動和轉速突變時,轉速存在一定的超調,逆系統解耦控制策略可以實現轉速和轉矩的良好解耦,系統的動態性能較差,但是靜態性能良好.而采用神經網絡逆解耦控制策略后電機系統的轉矩和轉速抖動明顯減小,動態性能得到了明顯的改善.
5 結論
逆系統解耦控制策略具有抗負載干擾能力差、動態性能不佳等缺點.針對這個問題,本文將神經網絡逆解耦控制策略應用于全速域范圍內的永磁同步電機系統中,并采用滑模附加控制器和神經網絡逆系統一起構成復合控制器對永磁同步電機系統進行控制,來提高系統的抗負載干擾能力和動態性能.分別在2種控制策略下采用一臺5.2 kW永磁同步電機進行仿真和實驗研究.結果表明本文所提策略可以在全速域范圍內有效的改善系統的動態性能.
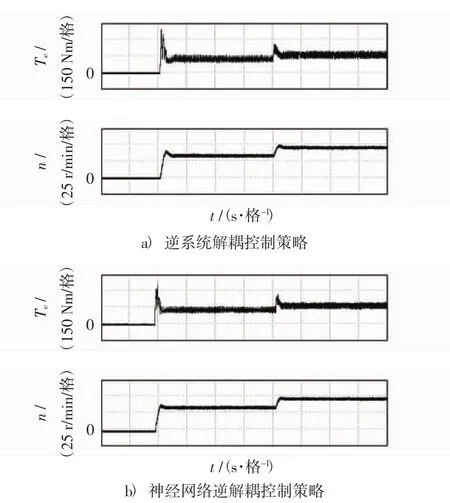
圖11 轉速突變時不同控制策略下系統實驗結果Fig.11 Simulation results of different control strategies under the condition of sudden change of speed
[1] Lin Faa-Jeng,Lin Chih-Hong.A permanent-magnet synchronous motor servo drive using self-constructing fuzzy neural network controller[J].IEEE Transactions on Energy Conversion,2004,19(1):66-72.
[2] Kwon Tae-Suk,Sul Seung-Ki.Novel antiwindup of current regulator of a surface-mounted permanent magnet motor for flux-weakening control[J].IEEE Transactions on Industry Applications,2006,52(5):1293-1300.
[3] Tripathi A,Khambadkone A M,Panda S K.Torque ripple analysis and dynamic performance of a space vector modulation based control method for AC-drives[J].IEEE Transactions on Power Electronics,2005,20(2):485-492.
[4] 周華偉,溫旭輝,趙峰,等.基于內模的永磁同步電機滑模電流解耦控制[J].中國電機工程學報,2012,32(15):91-99.
[5] 劉剛,李華德,曹勇.基于逆控制的永磁同步電機速度伺服系統[J].北京科技大學學報,2009,31(4):511-515.
[6] 戴先中,張興華,劉國海,等.感應電機的神經網絡逆系統線性化解耦控制[J].中國電機工程學報,2004,24(1):112-117.
[7] 劉國海,金鵬,魏海峰.無刷直流電機調速系統神經網絡逆控制[J].電工技術學報,2010,25(8):24-30.
[8] 王賀超,夏長亮,閻彥,等.基于諧振控制的表貼式永磁同步電機弱磁區電流諧波抑制[J].電工技術學報,2014,29(9):83-91.
[9] 張曉光,孫力,趙克.基于負載轉矩滑模觀測的永磁同步電機滑模控制[J].中國電機工程學報,2012,32(3):111-116.
Neural network inverse based decoupling control for PMSM drive system
LIU Xinhuan,XU Guizhi,LIU Xu
(School of Electrical Engineering,Hebei University of Technology,Tianjin 300132,China)
This paper presents a neural network inverse based decoupling control strategy for SPMSM(surface permanent magnet synchronous motors)in full speed range.The strategy can achieve good decoupling control performance,and obtain good dynamic and static performance in full speed range.Based on the motor system reversible proof,the linearized decoupling control characteristics are analyzed.Aiming at the disadvantage of the inverse decoupling control strategy which is too dependent on the mathematical model,the neural network inverse based decoupling control strategy is proposed,and an additional speed and current controller based on sliding mode variable structure are designed.A 5.2 kW permanent magnet synchronous motor is used as the controlled object for simulation and experimental study,and the result show that the neural network inverse based decoupling control strategy can achieve good decoupling control performance,and can obtain good dynamic and static performance in full speed range.
permanent magnet synchronous motor;neural network;inverse system;decoupling control;sliding mode control
TM341
A
1007-2373(2017) 05-0001-09
10.14081/j.cnki.hgdxb.2017.05.001
2017-05-03
國家自然科學基金(51507045)
劉欣歡(1989-),男,碩士研究生.
[責任編輯 代俊秋]
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
山東冶金(2019年3期)2019-07-10 00:54:04
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
消費導刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(2017年9期)2017-09-26 03:41:45
通信電源技術(2016年1期)2016-04-16 04:57:26