衛星導航信號碼片形狀監測算法研究
2017-11-10 11:52:36李瑞丹唐小妹歐鋼
全球定位系統 2017年4期
李瑞丹,唐小妹,歐鋼
(國防科技大學 電子科學與工程學院 衛星導航定位技術工程研發中心,湖南 長沙 410073)
衛星導航信號碼片形狀監測算法研究
李瑞丹,唐小妹,歐鋼
(國防科技大學 電子科學與工程學院 衛星導航定位技術工程研發中心,湖南 長沙 410073)
信號質量監測技術是保障衛星導航系統高服務性能的重要手段之一。多相關器法是一種傳統的信號質量監測算法,但它也存在一些局限性,如不能直觀地反映異常信號波形特征、檢測量效果隨著信號調制方式的不同而不同、隨著相關器的增多計算復雜度增大。針對以上問題,同時為了提高監測性能,本文采用了一種能獲取碼片過渡段的算法,并對檢測量構成形式進行擴充,提出了一種高效檢測量的篩選算法。最后本文對碼片監測算法和多相關器算法進行了仿真與實測數據分析,驗證了檢測量選擇算法能一定程度提高監測性能;碼片監測算法相對多相關器法提高了監測敏感度,且有在實際實現時有更小的計算量及對其他體制信號更強的適用性。
衛星導航;信號質量監測;信號畸變;檢測量選擇
0 引 言
衛星導航系統在為用戶提供服務的同時,要保證導航服務的質量,否則可能會造成不可預計的后果。而信號質量監測(SQM)技術[1],可實現在衛星信號發生故障時及時報警,避免用戶誤用故障信號。
1993年,GPS SV19號衛星信號功率譜畸變, SQM技術成為各國學者的研究重點,2001年Phelts提出了“2nd-order step”(2OS)模型,并研究了多相關器法檢測信號故障的技術[2],自此,多相關器法廣泛應用于SQM技術,文獻[3-5]針對不同類型的異常事件,用多相關器法進行檢測,均達到了較好的監測效果。但是多相關器法也存在局限性,包括檢測量形式單一、隨著相關器的增多計算復雜度增大、不能直觀地反映發生異常的信號波形特征、檢測效果隨著信號調制方式的不同而不同。隨著衛星導航系統的不斷發展,多相關器法逐漸不能滿足監測用戶的需求,針對這些問題已有部分學者做出研究,文獻[6]提出碼減載波的監測方法,減小了計算復雜度,但犧牲了部分監測性能;文獻[7]分析了如何選擇高效檢測量,但檢測量形式單一僅限于線性檢測量;文獻[8]改進了現有的SQM2b監測算法,保證了對L5頻段信號一定的適用性,但效果較差,只能通過限制前端帶寬和相關間隔來提高監測性能。
本文采用一種基于碼片形狀的信號質量監測算法來克服以上缺點,它的技術基礎來自諾瓦泰公司提出的vision相關器技術[9],這種技術最初被提出是為了抑制多徑,但它得到的碼片測量值也能用于信號質量監測,文獻[4]分析了這種算法的可行性,但僅試用了非常簡單的檢測量,監測性能仍有提升空間。本文擴充了該算法下的檢測量,并提出了一種檢測量的篩選算法,這種篩選算法同時適用于多相關器法以及碼片監測算法。文章最后對兩種監測算法及檢測量篩選算法進行了仿真和實測分析,結果證明檢測量篩選算法提供的檢測量具有更高的監測性能,同時碼片監測算法不僅克服了多相關器算法的部分缺點,還能提高監測性能。
1 信號畸變模型
由于信號帶限以及通道非理想等因素,接收的信號不可能完全與理想波形一致,為了防止過大的定位誤差,這些不一致常被約束在一定范圍內。信號質量監測的目的之一就是監測信號波形是否處于約束范圍內。為了模型化常見的信號畸變,方便信號質量監測算法的設計,國際民航組織(ICAO)提出了信號畸變模型[2]描述星上設備引起的信號碼片畸變,該模型由三個參數組成,其中Δ描述數字畸變時碼片上升沿/下降沿的超前或滯后,用阻尼頻率fd與阻尼因子σ描述模擬畸變造成的振鈴效應及三個參數結合描述混合畸變。這些信號畸變將造成信號相關峰的畸變從而引入測距誤差,如圖1示出了一種模擬畸變發生前后信號的碼片形狀、相關峰。該畸變模型可以作為信號質量監測算法性能評估的重要依據。

圖1 Δ=0,fd=6 MHz,σ=3.8MNep/s時信號發生模擬畸變前后的碼片形狀、相關峰
2 傳統多相關器監測算法
多相關器法用一對窄相關間隔的早遲相關器對信號進行跟蹤,其他相關器看做從屬于這一對相關器,它用早遲相關器跟蹤的結果來調整做相關的位置得到不同位置的相關函數值,實現實時監測相關峰。圖2示出了擁有位于相關峰[0 ±0.025 ±0.05 ±0.075 ±0.1]的九相關器相關峰測量點。

圖2 多相關器法相關峰測量位置舉例
將相關器輸出線性組合,可以得到一些檢測量,將這些檢測量與標準結果對比,可以反映相關峰的斜率、對稱性等,從而反映相關峰的畸變情況。常用的檢測量有:
Δ±d1/2,±d2/2= Δ±d1/2-△±d2/2

(1)

(2)
其中: Δ為Δ檢測量;R為比值檢測量;I為相關器輸出,下標d/2表示位于相關峰的位置。進行信號質量監測時,檢測量根據其參考分布均設有門限,一旦實測檢測量超過門限則判定信號可能發生故障。
多相關器法已經在監測GPS L1 C/A信號上已取得了較大的成功,但仍存在著不可忽視的缺點:
1) 不同體制信號相關峰特征差異大,舊的檢測量可能對新體制信號監測性能較差;
2) 相關峰不能直觀體現信號波形的畸變情況;
3) 若要獲取詳細的相關函數信息需要進一步增加相關器個數,增加硬件復雜度。
為了克服以上缺點可以對多相關器算法進行改進,直接對信號碼片形狀進行質量監測。
3 基于碼片形狀的監測算法
3.1算法基本原理
為了獲取碼片形狀測量值,本文利用了一種vision相關器技術,它利用信號碼片翻轉階段的相似性,可實現在不利用高增益天線刻意放大載噪比的情況下,實時輸出碼片翻轉段特定位置測量值。
vision相關器技術將一段偽碼看成多個重復的如圖3所示的碼片翻轉組成,每個翻轉段只存在符號的不同。它以碼片值過零點為中心,將一個完整的碼片翻轉分為多個不重疊的碼相位區間,為每一個碼相位區間配置一個累加器,利用傳統超前、即時、滯后三個支路實現碼跟蹤,估計當前采樣點碼相位,判斷當前采樣點屬于劃分的哪一個碼相位區間,然后將該信號送入相應區間的累加器與本地復制碼信號進行累加,即可得到當前碼相位區間碼片測量值。圖3示出了vision相關器技術下實際碼片形狀與碼片測量值之間的關系。設圖3所示的8個測量點中第i個測量點為bi,可以利用這些測量值組成非常直觀的檢測量:

(3)
式中:p′=d·I0,I0為即時支路的相關值;d為碼相位區間長度,最終的判決式可為
(4)


圖3 實際碼片波形與碼片測量值示意圖
3.2檢測量選擇算法
為了既充分利用擴充的檢測量,又保證檢測量數目不冗余。本文考慮了一種高效檢測量的篩選算法,利用信號畸變模型,對候選檢測量進行事前分析,在保證監測盡可能多的異常事件同時僅采用較少數量的檢測量。這種算法不僅能在檢測量過多時為碼片監測算法篩選檢測量,還同樣適用于為多相關器法。本文挑選指標時主要依據以下兩個事實:
1) 一個檢測量是否適用于檢測某一異常事件取決于異常發生時檢測量的偏離值相對于標準差的大小;
2) 最終選擇的檢測量組合要對所有可能發生的異常事件均具有較高的檢測性能。
根據以上兩個準則,檢測量篩選步驟如下:
1) 計算信號無異常時的檢測量參考值:接收正常信號,計算參考的碼片測量值biref,i表示碼片測量值編號,利用這些值求出候選檢測量參考值miref,i表示候選檢測量的編號;
2) 計算碼片測量值標準差σbi_ref和檢測量標準差σmi_ref:碼片測量值b和即時支路相關輸出I0可看做高斯分布,利用載噪比C/N0和積分時間T得到估計的均值與方差之間的關系為

σb2=2×d、σb1σb2=0,
(5)

σI02=1,σbσI0=d×σI02.
(6)
式中:μ為均值;σ為標準差;d為碼相位區間長度。利用以上得到的結果,計算理論上檢測量的標準差為
D(m)=A·D(b)·AT,
(7)
式中:D(m)為檢測量m的方差;A為雅克比矩陣;D(b)為碼片測量值方差陣可由式(5)直接得到,異常前后檢測量標準差視為不變;
3) 利用ICAO規定的信號異常模型,模擬所有可能的信號畸變:三個參數的取值如下: Δ∈[0,0.12]碼片,每0.01碼片取一個點;fd模擬畸變情況下在4~17 MHz間取值、混合畸變情況下在7.3~13 MHz間取值,每0.1 MHz取一個點;σ在0.8~8.8 MNep/s間取值,每0.5 MNep/s取一個點,共有14 072組畸變參數取值將納入考慮;
5) 挑選檢測量:根據式(4)中結果求得每組畸變參數下ratio的最大值,對每個候選檢測量,統計其ratio是否大于max(ratio)×0.9(即判斷該檢測量是否是針對該異常事件的高效檢測量),在所有檢測量里找到適用最多異常事件的檢測量,選擇該檢測量并輸出檢測量編號;
6) 更新候選畸變參數取值組合:將式(5)選擇的檢測量適用的異常事件對應的畸變參數取值從候選畸變參數取值中刪除;
7) 從剩余畸變參數取值組合中重復步驟式(5)和式(6),直到剩余的的畸變參數取值組數<0.1%×14072或已選擇的檢測量數目大于等于8.
以上檢測量篩選算法可由圖4直觀的表示。

圖4 檢測量篩選算法流程圖
3.3碼片監測算法執行流程
選擇實際利用的檢測量后,即可執行碼片監測算法,對信號質量進行監測,具體流程為
1) 初始化:接收正常信號,獲取檢測量的均值、標準差參考值以及對應的載噪比;
2) 進入監測狀態:計算檢測量測量值,對檢測量測量值做平滑,根據當前載噪比、檢測量平滑時間、檢測量標準差求得估計的檢測量標準差;
3) 確定門限,進行判決:將同一載噪比下畸變前后檢測量標準差視為不變,且均為高斯分布,不同的只有均值,根據統計判決理論,對于檢測量mi:
|mi_ewf-mi_ref|>THi=

(8)

4 仿真驗證與實測數據分析
4.1不同監測方案的仿真驗證
通過仿真試驗,對仿真的正常信號、畸變信號進行接收,采用三種監測方案對信號進行監測,各方案均用8個檢測量,具體的參數設置為:
多相關器算法:相關器位置:[0 ±0.025 ±0.05 ±0.075 ±0.1],采用篩選后的8個Δ、比值檢測量m1~m8={R+0.025,p、R-0.025,p、Δ±0.075,±0.025、R+0.075,p、Δ±0.1,±0.05、Δ±0.1,±0.075、R+0.1,p、R+0.05,p}碼片監測算法:碼片測量區間劃分與多相關器法的相關器位置選取相同,可以得到8個碼片測量值,采用的檢測量有兩個方案。
方案1: 直接碼片測量值m1~m8=b1~b8;

以上三種方案均采用同一跟蹤環路進行跟蹤,1 000 ms的累加時間對檢測量進行平滑,每100 ms出一次檢測結果,首先跟蹤載噪比為45 dBHz的正常無畸變信號以獲取各檢測量參考值、參考標準差,然后輸入相同載噪比的畸變信號,本文考慮了各種類型的信號畸變如表1所示,測量了畸變前后不同監測方案各檢測量的測量值,表2挑選地示出了不同監測方案下對表1設置的異常事件具有最高檢測概率的檢測量的測量值。

表1 畸變信號參數設置
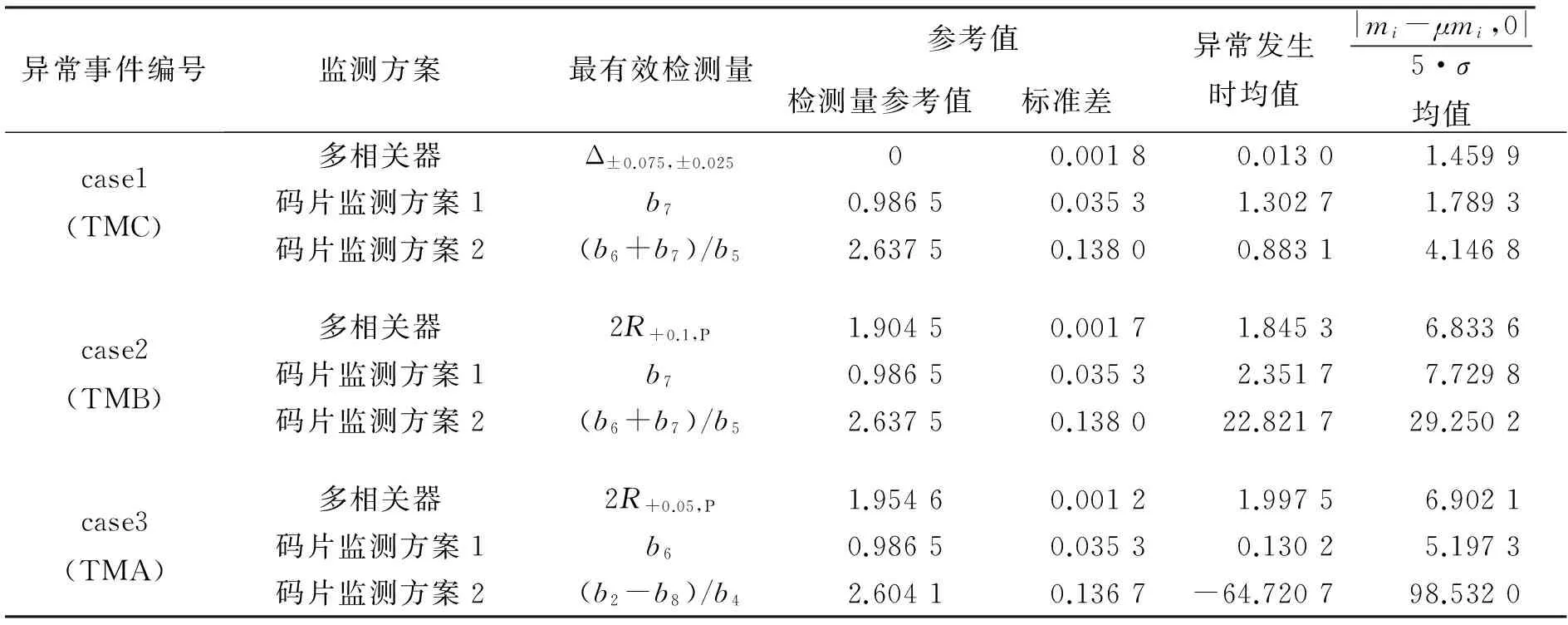
表2 信號畸變前后不同監測算法具有最高檢測概率的檢測量對應測量值
4.2不同監測方案下實測數據分析
利用以上三種監測方案對北斗的B1I信號進行了實際信號質量監測。使用軟件接收機對北斗1~7號衛星在軌B1I信號進行實測。由于采用了高增益天線對信號進行接收,接收信號的載噪比在62 dBHz左右,減少了檢測量的標準差,為了保持與4.1節同等監測水平減少了檢測量的平滑時間,利用式(5)、式(6),三種監測方案采用20 ms的檢測量平滑時間,每2 ms出一次檢測結果。
實測時首先跟蹤了以往北斗1~7號衛星正常B1I信號獲取各檢測量參考值、參考標準差,由于實測信號的載噪比不像仿真信號一樣穩定,因此在初始化階段計算參考值時需要給出對應的載噪比,而在實際監測階段要根據測量的載噪比調整各檢測量的門限。圖5示出了實測北斗GEO-1衛星B1I信號的載噪比、多相關器法檢測量R+0.025,P值及其門限值隨時間的變化圖。利用以上方法,對不同監測方案的多個檢測量進行測量,可以獲得最終監測結果。圖6示出了三種監測方案下,實測的北斗GEO-1衛星B1I信號監測結果,由圖可見三種監測方案都沒有報警,信號工作正常,其他衛星信號的監測結果與GEO-1衛星類似,此處予以省略。

圖5 北斗GEO-1衛星B1I信號載噪比、檢測量值及其門限值隨時間的變化

圖6 實測的北斗GEO-1衛星B1I信號三種監測方案的監測結果
由于實際衛星信號出現異常的幾率很小,本文對實測信號進行處理,將其通過了一個非線性相位巴特沃斯濾波器,模擬實際信號生成與接收過程中通道非理想特性造成的信號畸變,相比上節直接利用畸變模型仿真畸變信號更具實際意義。利用前文獲得的參考值,輸入通過濾波器的信號,監測結
果如圖7所示。由圖可見三種監測方案均能很好地對異常進行識別,三種監測方案敏感程度不同,由于針對的是特定異常事件,不能反映監測算法整體監測性能,因此本文以畸變參數模型為參考,分析了不同畸變參數取值下各監測算法的檢測能力,具體在下一節進行闡述。

圖7實測信號通過濾波器后三種監測方案的監測結果
5 監測算法性能對比
5.1監測效果對比


圖8 不同方案下最小不可檢測異常事件數隨使用的檢測量數目的變化情況

圖9 不同方案下最小不可檢測異常事件數隨載噪比的變化
5.2工程應用中的實現與性能對比
目前碼片監測算法在實際信號質量監測中的應用仍較少,但利用vision相關器技術進行多徑抑制已有工程實現,結合已有研究成果及本文研究內容,本文分為三個方面對碼片監測算法的實際工程實現進行了構想,并將其與多相關器法進行了對比。
1) 檢測量篩選算法在工程應用中的實現方法
檢測量篩選算法是基于畸變前后的信號特征對檢測量的檢測性能進行事前分析,需預先將信號無異常時的碼片形狀作為參考。本文討論的是將理想帶限碼片作為參考的檢測量篩選算法,可以篩選出針對理想碼片的高效檢測量。但是不同的接收機具有不同的相關前帶寬、相關間隔,不同接收機的參考碼片測量值不可能相同,直接利用本文算法只能篩選出比較高效的檢測量,實際應用中,可針對特定接收機獲取碼片測量值,然后執行本文算法。由于所有過程是事前分析,因此在實際進行監測時應用檢測量篩選算法與否對計算復雜度沒有影響,僅是使用的檢測量形式發生了改變。
2) 兩種監測算法在工程實現時的硬件復雜度
碼片監測算法獲得的碼片測量值利用了vision相關器技術,而多相關器技術已比較成熟,vision相關器與多相關器技術硬件構成分別如圖10、圖11所示。圖中對鑒相、濾波部分進行了簡化,重點描述碼片測量值與相關結果的獲取過程。由以上兩圖可知,多相關器法若想增加相關輸出,需增加相關器,而碼片監測算法只用進一步細分碼相位區間,并增加一個累加器,但計算量沒有增加,不管獲取多少個測量結果都只是將一次碼相關分割成多個累加結果。因此,碼片監測算法的硬件實現復雜度與計算量均優于多相關器法。

圖10 vision相關器硬件構成

圖11 多相關器的硬件構成
3) 兩種算法在實際應用中的適用范圍:
前文主要圍繞BPSK信號分析了不同的監測算法,但新體制下BOC類信號相關峰的多峰特性使相關峰發生變化,同一相關峰檢測量在發生同一畸變時可能對BPSK信號很敏感,但對BOC類信號不敏感,因此相關峰信息對監測新體制信號雖然也具有一定監測能力,但實際應用中要保證與BPSK信號同等的監測效果,相關間隔和檢測量的選擇需要根據新體制信號相關峰畸變模型重新進行分析。
而不管是何種體制信號,只要接收帶寬相同,碼片過渡段十分相似,采用同一畸變參數,畸變的碼片波形也十分相似[4]。因此可以推出若采用同一接收帶寬,同一位置的碼片測量值變化不大。因此碼片監測算法相較多相關器算法對其他體制信號有更強的適用性,無需復雜變換即可將碼片監測算法直接移植用于監測新體制信號。
6 結束語
本文首先介紹了信號質量監測技術的發展現狀,及廣泛應用于信號質量監測的多相關器算法,分析了該算法的局限性。
針對這些局限性,本文采用了一種利用碼片形狀測量值的信號質量監測算法,同時為了提高監測性能,擴充了檢測量構成形式,并提出一種同時適用于多相關器法、碼片監測算法這兩種監測算法的檢測量篩選算法。
最后,對不同監測算法、不同檢測量選擇方案進行了仿真驗證與實測分析,結果表明利用的檢測量選擇算法篩選檢測量后的監測算法相對使用傳統檢測量的監測算法性能有所提升;同時還論證了碼片監測算法監測性能優于多相關器法,在實際應用時也具有更小的硬件復雜度以及更廣泛的適用性,但在這一方面僅進行了簡單地理論分析,下一步工作是驗證碼片監測算法對其他體制信號的適用性。
[1] CHRISTIE J R I. GPS signal quality monitoring system[C]//Proceedings of International Technical Meeting of the Satellite Division of the Institute of Navigation, 2004:2239-2245.
[2] PHELRTS R E. Multi-correlator techniques for robust mitigation of threats to GPS signal quality [D]. Standford University, Palo Alto, Calif, USA, 2001.
[3] GAN X. multi-correlators techniques for GPS signal quality monitoring[J]. Chinese Space Science & Technology, 2011, 31(4):30-37.
[4] PHELRTS R E, WONG G, WALTER T,etal. Signal deformation monitoring for dual-frequency WAAS[C].//Proceedings of the International Technical Meeting of the Institute of Navigation, 2013:93-106.
[5] ALI K, MANFREDINI, DOVIS E G. Vestigial signal defense through signal quality monitoring techniques based on joint use of two metrics[C]//In Proceedings of the 2014 IEEE/ION PLANS 2014:1240-1247.
[6] SHLOSS P. A simple method of signal quality monitoring for WAAS LNAV/VNAV[C]//Proceedings of International Technical Meeting of the Satellite Division of the Institute of Navigation, 2002:800-808.
[7] PHELRTS R E, WALTER T, ENGE P. Toward real-time SQM for WAAS: Improved detection techniques[C]//Proceedings of the 16th International Technical Meeting of the Satellite Division of the Institute of Navigation, ION GPS 2003:2739-2751.
[8] THEVENON P, JULIEN O, TESSIER Q,etal. Detection performances of evil waveform monitors for the GPS L5 signal[C]//Ion Gnss+International Technical Meeting of the Satellite Division of the Institute of Navigation, 2014:3312-3322.
[9] FENTON P C, JONES J. The theory and performance of NovAtel Inc.'s vision correlator[C]//Proceedings of the 19 th International Technical Meeting of the Satellite Division of the Institute of Navigation, 2006:2178-2186.
SatelliteNavigationSignalMonitoringAlgorithmBasedonChipShapeLIRuidan,TANGXiaomei,OUGang
(SatelliteNavigationR&DCenter,SchoolofElectronicScienceand
Engineering,NationalUniv.ofDefenseTechnology,Changsha410073,China)
Signal quality monitoring technology is one of the significant means to guarantee the high performance of satellite navigation system. Multi-correlator technique is a commonly used method for signal quality monitoring. However, it also has some shortcomings. For example, it cannot show directly characteristics of distorted waveform, has different monitoring performance due to signal modulation and its hardware complexity increases with the increase of correlator. To solve these problems and improve the monitoring performance, this paper uses an algorithm that can measure the transition shape of the code and proposes an algorithm to expand metrics’ form and selects efficient metrics. Finally, this paper uses simulation and real data to compare Multi-correlator algorithm and chip shape monitor algorithm. The result proves that selected metrics is more effective than raw metrics. The result also shows that chip shape monitor algorithm is more sensitive for distorted waveform, has stronger applicability to other modulation and has smaller calculation complexity.
Satellite navigation; SQM; signal distortion; metric select
10.13442/j.gnss.1008-9268.2017.04.001
P228.4
A
1008-9268(2017)04-0001-09
2017-04-20
聯系人: 李瑞丹 E-mail: liruidan@qq.com
李瑞丹(1993-),女,碩士研究生,主要從事衛星導航信號處理。
唐小妹(1982-),女,副研究員,主要從事衛星導航系統、導航應用、導航信號體制等領域的教學科研及工程研制工作。
歐鋼(1969-),男,教授,博士生導師,主要從事衛星導航定位、導航信號處理、導航信息處理及工程技術實現等研究工作。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
海峽科技與產業(2016年3期)2016-05-17 04:32:12
