預(yù)置舵角下超空泡航行體運動過程彈道特性研究
2017-11-09 09:22:22時素果王亞東劉樂華楊曉光
兵工學(xué)報 2017年10期
時素果, 王亞東, 劉樂華, 楊曉光
(北京機電工程研究所, 北京 100074)
預(yù)置舵角下超空泡航行體運動過程彈道特性研究
時素果, 王亞東, 劉樂華, 楊曉光
(北京機電工程研究所, 北京 100074)
為研究超空泡航行體在水平面機動轉(zhuǎn)彎過程中的彈道特性,采用航行體頭部設(shè)置預(yù)置舵角方法實現(xiàn),開展了0°、3°和6°預(yù)置舵角下航行體自由運動的試驗研究。試驗在水池中進行,采用高速攝影觀察不同預(yù)置舵角下的空泡演化過程,采用內(nèi)測裝置測量航行體運動參數(shù),獲得了不同預(yù)置舵角下超空泡航行體水平運動過程中的彈道特性。試驗結(jié)果表明:當(dāng)預(yù)置舵角為0°時,航行體側(cè)向力由于非定常因素擾動小幅波動,但均值基本為0;當(dāng)存在預(yù)置舵角時,隨著預(yù)置舵角的增大,軸向力和側(cè)向力不斷增加;預(yù)置舵角可以控制超空泡航行體的彈道水平機動轉(zhuǎn)彎,且預(yù)置舵角越大、彈道越容易轉(zhuǎn)彎,但舵角過大會導(dǎo)致航行體彈道失穩(wěn)。
流體力學(xué); 超空泡航行體; 預(yù)置舵角; 機動轉(zhuǎn)彎; 彈道; 試驗研究
0 引言
航行體超空泡技術(shù)是指在空化器和人工通氣的共同作用下,形成一個包裹自身的大型氣泡,以此來大幅度降低摩擦阻力,從而使得水下航行體獲得90%的減阻量[1]。借此,水下航行體的速度可提高到100 m/s以上[2-3],這種減阻水平將對水下武器的研制產(chǎn)生巨大的影響。但由于超空泡航行體流場的特殊性與復(fù)雜性,使得該技術(shù)在實際應(yīng)用中面臨諸多挑戰(zhàn),其中在超空泡狀態(tài)下航行體能否機動或者機動過程中彈道是否穩(wěn)定成為目前研究的熱點,國內(nèi)外很多學(xué)者對此開展了大量的研究。
近年來,國外學(xué)者Kirschner等[4]和Vasin[5]基于勢流理論預(yù)測空泡形態(tài),簡化系列數(shù)學(xué)模型,構(gòu)建了最基本的超空泡航行體動力學(xué)模型。Kulkarni等[6]和Kirschner等[7]基于單自由度研究了無控條件下超空泡射彈的運動過程,獲得了其動力學(xué)行為,掌握了航行體水平航行的一些典型特征參數(shù)變化規(guī)律。Geol等[8]采用空泡膨脹獨立性原理的方法,在考慮空泡記憶效應(yīng)的基礎(chǔ)上,獲得了超空泡航行體尾部滑行的非線性力,建立了超空泡航行體非線性動力學(xué)模型。Vanek等[9]研究了超空泡航行體6自由度運動,在小擾動線性化的基礎(chǔ)上分析了運動穩(wěn)定性,發(fā)現(xiàn)縱向和橫向在無控條件下運動均處于穩(wěn)定狀態(tài)。國內(nèi)學(xué)者對超空泡狀態(tài)下的彈道特性也進行了大量研究,蔣運華等[10]采用理論和數(shù)值模擬相結(jié)合的方法,考慮航行體與空泡之間的相互關(guān)系,建立了水動力計算方法和動力學(xué)方程,獲得了巡航段水平面彈道特性。文獻[11-13]基于流場數(shù)值模擬方法和運動學(xué)方程,建立了超空泡航行體動力學(xué)仿真模型,獲得了超空泡航行體巡航狀態(tài)下縱平面內(nèi)的動力學(xué)行為,發(fā)現(xiàn)超空泡航行體在無控條件下仍具有一定的穩(wěn)定性。曹偉等[14-15]建立了自然超空泡航行體在縱平面內(nèi)簡化的運動方程,編制了相應(yīng)的彈道程序,并對其在100 m/s左右速度區(qū)段內(nèi)的典型彈道特性進行了分析,實現(xiàn)了定深直航、變航向、變深度等典型彈道機動。馮光等[16]應(yīng)用細(xì)長體理論獲得了超空泡航行體的流體動力,進行了動力學(xué)建模,仿真并獲得了超空泡航行體的運動彈道。從上述研究成果可以看出研究超空泡狀態(tài)下彈道特性的必要性,但在彈道特性研究中,空泡形態(tài)和流體動力主要采用經(jīng)典的勢流理論經(jīng)驗公式或者數(shù)值模擬方法獲得,建立的動力學(xué)模型也進行了大量簡化處理,未經(jīng)試驗驗證,因此迫切需要采用試驗研究這種最能真實反映物理流動過程的方法開展研究。
本文主要通過建立的一套水下高速航行試驗裝置,通過試驗研究的方法開展預(yù)置舵角下水下航行體高速自由航行試驗,通過高速錄像觀察航行體水下高速航行過程的空泡演化規(guī)律,通過內(nèi)測裝置測量了航行體運動參數(shù),在上述數(shù)據(jù)的基礎(chǔ)上分析了超空泡航行體機動過程彈道特性。
1 試驗裝置與方法
超空泡航行體水下高速航行過程試驗示意圖見圖1. 開展試驗時,將試驗?zāi)P桶惭b在發(fā)射管內(nèi),通過發(fā)射架將發(fā)射管安放在水下要求的深度,發(fā)射炮以不同的壓力發(fā)射,使試驗?zāi)P彤a(chǎn)生不同的水下航行速度,用高速攝像系統(tǒng)記錄入水過程空泡流場演化過程,用內(nèi)測裝置測量試驗?zāi)P偷倪\動姿態(tài);航行體在水下高速運動一段時間后,在空泡未能包裹航行體現(xiàn)象出現(xiàn)之前,將被回收防護裝置一并回收。
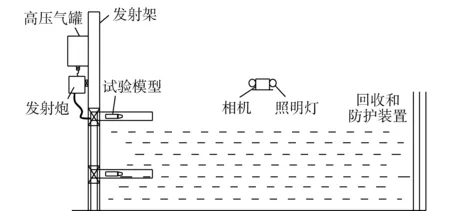
圖1 超空泡航行體自由航行過程試驗示意圖Fig.1 Schematic diagram of free motion experiment of supercavitating vehicle
其中,試驗水池長70 m、寬44 m、深10 m;試驗?zāi)P驮谒赂咚俸叫泻螅瑸楸苊庠谠囼炦^程中對水池底部或壁面造成破壞,采用懸掛鋼板方式對模型實施攔截;發(fā)射裝置包含發(fā)射炮、發(fā)射架和高壓氣體壓縮機3部分,加速炮管(內(nèi)徑100 mm,長6 000 mm)管口設(shè)置有隔水薄膜,其工作原理為:將一定量的氮氣注入有限體積的炮腔內(nèi),調(diào)節(jié)閥門并通過氣壓表標(biāo)定氣壓強度,使試驗?zāi)P驮诤愣鈮旱某掷m(xù)作用下經(jīng)加速炮管加速到一定速度后射入水池。
測量運動參數(shù)時,選取以發(fā)射點為零點的地面坐標(biāo)系OXYZ,以及建立原點位于航行體質(zhì)心的彈體坐標(biāo)系oxyz來描述超空泡航行體運動,起始運動時刻,地面坐標(biāo)系和彈體坐標(biāo)系零點重合。
6自由度運動系統(tǒng)采用模塊化設(shè)計,3個通道的加速度計通過延長線與主板連接,加速度計模塊采用單面電路板設(shè)計,用兩個螺釘剛性連接在內(nèi)測支架上,以有效避免主電路板自身振動帶來的影響。內(nèi)測裝置主要技術(shù)指標(biāo)為:軸加速度計,量程:70g;軸角速率陀螺,量程:2 000°/s;采樣精度:16位;采樣率:3 kHz(6通道同步);容量:128 KB,最大采樣率時可存儲約3.5 s數(shù)據(jù)。
高速攝像系統(tǒng)采用美國REDLAKE公司HG-100K型號、機載內(nèi)存為4 GB的高速攝像機,以1 000幀/s的速度對整個入水過程進行記錄。
為了實現(xiàn)航行體頭部向空泡內(nèi)通氣的功能,選擇碳纖維氣瓶(尺寸為φ62 mm×300 mm,額定壓力為30 MPa,容積為0.5L)置于模型內(nèi)部。試驗前瓶內(nèi)充入一定壓力(p≤10 MPa)的氣體后保持密封狀態(tài)裝入試驗?zāi)P停叫畜w開始運動時刻用重塊撞擊慣性閥打開通氣管路,高壓氣體從航行體前端通氣孔流入空泡內(nèi)。
2 試驗?zāi)P?/h2>
設(shè)計一個符合超空泡流型的試驗?zāi)P烷_展水下高速航行試驗,模型重量為7.6 kg,長800 mm,最大直徑100 mm,試驗?zāi)P颓岸嗣嬷睆?5.2 mm,具體外形如圖2所示。

圖2 試驗?zāi)P蛯嵨锖统叽鐖DFig.2 Physical photograph and size of experimental model
主要無量綱參數(shù)軸向力系數(shù)Cx、側(cè)向力系數(shù)Cz分別定義如下:
(1)

(2)
式中:Fx和Fz分別為航行體所受到的軸向力和側(cè)向力;u為超空泡航行體運動過程不斷變化的速度;Ac為圓柱段面積;ρl為水的密度。
3 試驗結(jié)果分析
為了探索超空泡航行體機動轉(zhuǎn)彎過程的彈道特性,采用航行體頭部設(shè)置預(yù)置舵角的方法,開展不同預(yù)置舵角下航行體水下高速自由航行試驗研究,其中預(yù)置舵角分別設(shè)計為0°、3°和6°,速度為60 m/s,通氣壓力為4 MPa.
為了分析不同預(yù)置舵角下超空泡航行體運動過程的彈道特性,圖3和圖4分別給出了3種預(yù)置舵角下航行體運動過程中的受力與彈道特性曲線。

圖3 不同預(yù)置舵角下超空泡航行體 運動過程的受力曲線Fig.3 Force curves of supercavitating vehicle free motion at different preset rudder angles
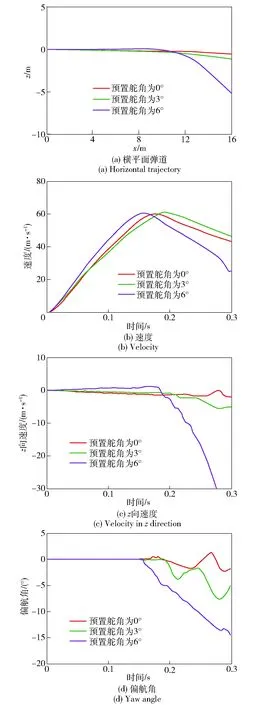
圖4 不同預(yù)置舵角的運動參數(shù)曲線Fig.4 Motion parameters curves at different preset rudder angles
針對超空泡航行體自由航行過程的受力,從圖3可知,軸向力在一定值附近小幅波動,隨著預(yù)置舵角的增大,在出筒的瞬間,由于尾氣的影響使軸向力變化規(guī)律不明顯,不再分析。隨著時間的推移,軸向力的絕對值隨著預(yù)置舵角的增大而增大,這是因為隨著舵角的增大,空泡不再對稱,沾濕面積增大。這一現(xiàn)象與俄羅斯經(jīng)典理論公式超空泡航行體軸向力隨著空化器舵角的增大而增大的結(jié)論一致。對于側(cè)向力,當(dāng)預(yù)置舵角為0°時,航行體側(cè)向力由于非定常因素的擾動而小幅波動,但均值基本為0,隨著預(yù)置舵角的增加,側(cè)向力不斷增加。
表1 3種預(yù)置舵角下空泡流場演化過程
Tab.1 Evolutionary processes of cavity at three preset rudder angles

圖4分別給出了不同預(yù)置舵角下的運動參數(shù)曲線,結(jié)合受力圖可知,當(dāng)預(yù)置舵角為0°時,航行體未受到側(cè)向力,即不存在偏航力矩,水下航行體以直航高速運動,水平面彈道曲線基本為一條直線,彈道并未發(fā)生彎曲,偏航方向的位移基本上為0 m. 當(dāng)有預(yù)置舵角時,超空泡航行體高速運動,航行體在側(cè)向力的作用下對質(zhì)心形成偏航力矩,使航行體的彈道以一定的點為圓心轉(zhuǎn)彎,迫使航行體彈道產(chǎn)生偏轉(zhuǎn)。預(yù)置舵角越大,受到的側(cè)向力和力矩越大,轉(zhuǎn)動半徑越小。
為了詳細(xì)分析產(chǎn)生上述現(xiàn)象的原因,表1給出了3種預(yù)置舵角下航行體運動過程中典型時刻空泡形態(tài)圖。結(jié)合圖3、圖4和表1可知,在超空泡航行體水下高速運動過程中,空泡形態(tài)并非一種固定形態(tài),而是隨著超空泡航行體的運動而變化。當(dāng)預(yù)置舵角為0°時,由于非定常因素擾動的影響,超空泡航行體尾部左右輕微拍動空泡壁,但仍處于運動平衡狀態(tài),運動軌跡基本為一條直線,具體見運動參數(shù)曲線。針對本次實驗,當(dāng)有預(yù)置舵角時,超空泡航行體受到向左方向的側(cè)向力,導(dǎo)致航行體向左轉(zhuǎn)彎,與常規(guī)航行體的轉(zhuǎn)彎不同。在向左轉(zhuǎn)彎的過程中超空泡航行體尾部右側(cè)拍擊空泡壁,局部沾濕,產(chǎn)生恢復(fù)力和力矩,隨著拍擊運動的增強,沾濕面積增大,尾部力和力矩增大,使尾部向泡內(nèi)運動,使得航行體的轉(zhuǎn)彎過程趨勢減小,偏航角度減小,預(yù)置舵角產(chǎn)生的力和力矩再次大于尾部受到的力和力矩,進一步向左轉(zhuǎn)彎,使彈道逐漸完成偏轉(zhuǎn)運動,此過程可通過空泡形態(tài)演變過程及偏航角曲線等可知。
隨著預(yù)置舵角的增大,彈道曲線的回轉(zhuǎn)半徑減小,彈道更容易轉(zhuǎn)彎。但預(yù)置舵角也不能太大,如在進行6°舵角試驗過程中,超空泡航行體轉(zhuǎn)彎過程沒有出現(xiàn)明顯得拍擊現(xiàn)象,這是因為舵角過大,其產(chǎn)生的偏轉(zhuǎn)力矩致使試驗?zāi)P脱杆俪霈F(xiàn)轉(zhuǎn)彎,而此過程中尾部拍擊產(chǎn)生的恢復(fù)力相對為一小值,最終導(dǎo)致彈道失穩(wěn),故實際應(yīng)用過程中舵角應(yīng)小于此值。因此,最大預(yù)置舵角值應(yīng)基于航行體外形和空泡流型的不同而定。
4 結(jié)論
本文對不同預(yù)置舵角下超空泡航行體自由航行過程進行了試驗研究,分析了不同預(yù)置舵角下超空泡航行體運動過程的彈道特性,得出以下結(jié)論:
1)通過預(yù)置舵角可以控制彈道機動轉(zhuǎn)彎,且預(yù)置舵角越大、彈道越容易轉(zhuǎn)彎、機動半徑越小,但預(yù)置舵角過大,會導(dǎo)致航行體彈道失穩(wěn);
2)當(dāng)預(yù)置舵角為0 ℃時,航行體側(cè)向力由于非定常因素的擾動而小幅波動,但均值基本為0,當(dāng)存在預(yù)置舵角時,隨著預(yù)置舵角的增加,軸向力和側(cè)向力將不斷增加。
References)
[1] 傅慧萍.回轉(zhuǎn)體超空泡流減阻特性及穩(wěn)定性研究[D].上海:上海交通大學(xué),2003.
FU Hui-ping. Research on drag reduction characteristics and motion stability of supercavitating axisymmetric body[D]. Shanghai: Shanghai Jiao Tong University,2003.(in Chinese)
[2] 傅金祝.超空泡水中兵器[J].水雷戰(zhàn)與艦船防護,1998(2):2-4.
FU Jin-zhu. Underwater supecavitating bodies [J]. Mine and Warship Protection,1998(2):2-4.(in Chinese)
[3] 陳兢.新概念武器- 超空泡水下高速武器[J].飛航導(dǎo)彈,2004(10):34-37.
CHEN Jing.New-concept weapons - the underwater supercavitating high-speed vehicle [J]. Aerodynamic Missile Journal,2004(10):34-37.(in Chinese)
[4] Kirschner I N, Uhlman J S. Overview of high-speed supercavitating vehicle control[C]∥Proceedings of AIAA Guidance, Navigation, and Control Conference and Exhibit. Keystone, CO, US: American Institute of Aeronautics and Astronautics Inc.,2006:3100-3116.
[5] Vasin A D. The principle of independence of the cavity sections expansion (Logvinovich’s principle) as the basis for investigation on cavitation flows[R]. Brussel,Belgium: von Karman Institute for Fluid Dynamics,2001.
[6] Kulkarni S,Pratap R.Studies on dynamics of a supercavitating projectile[J].Applied Mathematical Modeling,2000,24(2):113-129.
[7] Kirschner I N,Rosenthal B J,Uhlman J S.Simplified dynamical systems analysis of supercavitating high-speed bodies[C]∥5th International Symposium on Cavitation. Osaka,Japan: MARIN,2003.
[8] Geol A. Robust control of supercavitating vehicles in the presence of dynamic and uncertain cavity[D].FL,US: University of Florida,2005.
[9] Vanek B,Bokor J,Balas G J,et al. Longitudinal motion control of a high-speed supercavitation vehicle[J]. Journal of Vibration and Control, 2007,13(2):159-184.
[10] 蔣運華.水中超空泡流及航行體彈道特性研究[D]. 哈爾濱:哈爾濱工程大學(xué),2012.
JIANG Yun-hua. The investigation of the supercavitation flows underwater and the trajectory characteristics of the vehicles[D].Harbin:Journal of Harbin Engineering University,2012. (in Chinese)
[11] 于開平,張廣,鄒望,等.超空泡航行體縱向平面動力學(xué)行為的CFD分析[J].船舶力學(xué),2014,18(4):370-376.
YU Kai-ping, ZHANG Guang, ZOU Wang, et al. CFD analysis of the dynamic behavior of supercavitating vehicle in the longitudinal plane[J]. Journal of Ship Mechanics,2014,18(4):370-376.(in Chinese)
[12] 王京華,魏英杰,于開平,等.基于空泡記憶效應(yīng)的水下超空泡航行體建模與控制[J].振動與沖擊,2010,29(8):160-163.
WANG Jing-hua, WEI Ying-jie, YU Kai-ping, et al. Modeling and control of underwater supercavitating vehicle based on memory effect of cavity[J]. Journal of Vibration and Shock, 2010,29(8):160-163.(in Chinese)
[13] 趙成功,王聰,孫鐵志,等.初始擾動對射彈尾拍運動及彈道特性影響分析[J].哈爾濱工業(yè)大學(xué)學(xué)報,2016,48(10):71-76.
ZHAO Cheng-gong, WANG Cong, SUN Tie-zhi, et al. Analysis of tail-slapping and ballistic characteristics of supercavitating projectiles under different initial disturbances[J].Journal of Harbin Institute of Technology, 2016,48(10):71-76.(in Chinese)
[14] 曹偉,魏英杰,韓萬金,等.超空泡航行體典型彈道特性仿真研究[J].哈爾濱工程大學(xué)學(xué)報,2010,31(3):323-328.
CAO Wei, WEI Ying-jie, HAN Wan-jin, et al. Simulating the trajectory of supercavitating vehicles[J].Journal of Harbin Engineering University,2010,31(3):323-328.(in Chinese)
[15] 曹偉,魏英杰,韓萬金,等.自然超空泡航行體彈道穩(wěn)定性分析[J].哈爾濱工業(yè)大學(xué)學(xué)報,2012,44(1):26-30.
CAO Wei,WEI Ying-jie,HAN Wan-jin,et al. Simulation of the trajectory stability of natural supercavitating vehicles[J]. Juornal of Harbin Institute of Technology,2012,44(1):26-30.(in Chinese)
[16] 馮光,顏開.超空泡航行體水下彈道的數(shù)值計算[J].船舶力學(xué),2005,9(2):1-8.
FENG Guang, YAN Kan. Numerical calculation of underwater trajectory of supercavitating bodies[J]. Journal of Ship Mechanics,2005,9(2):1-8.(in Chinese)
ResearchontheTrajectoryCharacteristicsofSupercavitatingVehicleatPresetRudderAngle
SHI Su-guo, WANG Ya-dong, LIU Le-hua, YANG Xiao-guang
(Beijing Electro-Mechanical Engineering Institute,Beijing 100074,China)
The turning maneuver trajectory characteristics of the supercavitating vehicle on the horizontal plane are realized by presetting the rudder angles in the head of supercavitating vehicle, and the free motion of vehicle at the preset rudder angles of 0°, 3°and 6° is investigated in experiment. The experiment is done in a pool. The eveluationary process of cavity is observed by using a high-speed video camera, the motion parameters of vehicle are measured using a built-in measuring device,and the turning maneuver trajectory characteristics of supercavitating vehicle on the horizontal plane at different preset rudder angles are acquired. The experimental results show that the side force of vehicle shows a small fluctuation due to the perturbation of the unsteady factors when the preset rudder angle is 0°, but the average value is basically 0. When the preset rudder angle exists, the axial and side forces increase with the increase in the preset rudder angle. The preset rudder angle can be used to control the horizontal turning maneuver of supercavitating vehicle. The larger the preset rudder angle is, the easier the turning maneuver is, but an overlarge preset rudder angle may cause the trajectory destabilization.
fluid mechanics; supercavitating vehicle; preset rudder angle; turning maneuver; trajectory; experimental study
2017-03-03
國家自然科學(xué)基金項目(11602260)
時素果(1982—), 女, 工程師。 E-mail: shisuguo@126.com
TJ630.1
A
1000-1093(2017)10-1974-06
10.3969/j.issn.1000-1093.2017.10.013