改進的PSO-SVM在表面肌電信號模式識別中的研究*
2017-11-03 12:32:42顧明亮
傳感技術學報 2017年10期
顧明亮,劉 俊
(上海電機學院電氣學院,上海 201306;2.上海電機學院機械學院,上海201306)
項目來源:上海電機學院登峰學科機械工程支持項目(16DFXK01)
2017-04-27修改日期2017-06-22
改進的PSO-SVM在表面肌電信號模式識別中的研究*
顧明亮1,劉 俊2*
(上海電機學院電氣學院,上海 201306;2.上海電機學院機械學院,上海201306)
為了提高表面肌電信號的遙操作機械手運動模式識別率,設優(yōu)化支持向量機(IPSO-SVM)。該方法首先簡化PSO的位置和速度公式,然后提出ESE狀態(tài)估計策略判斷算法的“早熟”收斂,最后對6類手臂運動模式(握拳、展拳、內(nèi)旋、外旋、屈腕、伸腕)進行分類并與另外4個測試算法的分類結果進行比較。實驗結果表明:IPSO-SVM算法的平均準確率為93.75%,而傳統(tǒng)SVM算法的平均準確率為70.21%;算法的訓練時間和泛化時間都有明顯的提高;具有較強的魯棒性和抗干擾能力。因此IPSO-SVM算法可以很好的解決表面肌電信號的動作模式分類問題,具有很好的應用價值。
表面肌電信號;模式識別;粒子群優(yōu)化算法;支持向量機
在核工業(yè)領域遙操作機器人已得到了廣泛的發(fā)展[1-5],其中基于表面肌電信號的遙操作機械手越來越成為研究的熱點,它可以對關鍵設備進行維護、放射性廢棄物處理和異物打撈等。目前在表面肌電信號遙操作機械手的核設備更換過程中,最重要的是基于表面肌電信號機械手的多運動模式識別。
近幾年,支持向量機(SVM)在表面肌電信號的動作模式識別中的應用越來越多,進而有許多改進的新方法。例如:張啟忠等[6]提出以關聯(lián)維和分維數(shù)作為特征向量,并采用支持向量機的二叉樹結構實現(xiàn)手臂動作模式分類;王玲等[7]采用最小二乘支持向量機(LS-SVM)進行模式識別,實驗效果明顯優(yōu)于傳統(tǒng)的RBF神經(jīng)網(wǎng)絡分類器;武昊等[8]采用PSO優(yōu)化SVM對跌倒表面肌電信號進行了模式識別分析,準確率優(yōu)于網(wǎng)格法和GA-SVM分類器且具有較強的抗干擾能力。粒子群算法(PSO)是一種迭代優(yōu)化算法,具有依賴經(jīng)驗參數(shù)少、收斂速度快等優(yōu)點,缺點是容易陷入“早熟”收斂且進化后期收斂速度慢。目前,對PSO的改進方法主要有3種:改進自身參數(shù)[9]、改進粒子領域拓撲結構[10]和與其他算法融合[11-12]。
本文提出改進的PSO-SVM算法,首先對粒子群算法的自身參數(shù)進行優(yōu)化,再將改進的粒子群算法與支持向量機融合,解決了模式識別過程中粒子容易聚集在某一特定位置的“早熟”收斂問題,使表面肌電信號在遙操作機械手的應用中模式識別準確率更高,操作精度更準確。
1 SVM算法原理簡介
支持向量機SVM(Support Vector Machines)是由著名學者VAPNIK V N基于統(tǒng)計學習的VC理論和結構風險最小原理上提出來的一種新的機器學習方法。它的核心思想是將非線性數(shù)據(jù)進行變換映射到高維線性空間中,滿足分類間距最大,使分類線能正確的把兩類樣本分開,進而得到所需要的最優(yōu)分類超平面。如圖1所示,假設給定數(shù)據(jù)集為{xi,yi},i=1,2,…,N,yi∈{-1,+1},xi∈Rd,平面上分別用圈和叉表示兩個待分類的樣本。
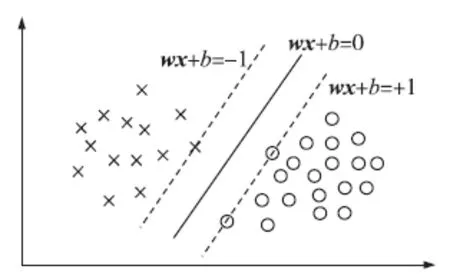
圖1 支持向量機原理圖
SVM引入松弛變量ξi≥0和懲罰系數(shù)C(C>0),則超平面的求解公式為:

(1)
式中:αi是二次優(yōu)化問題所求解的拉格朗日因子,則得到的最優(yōu)分類超平面為:
2 IPSO-SVM算法原理及實現(xiàn)過程
2.1 標準PSO算法原理
粒子群優(yōu)化算法PSO(Particle Swarm Optimization)是由Eberhart等人提出的一種新的全局優(yōu)化進化算法,源于對鳥類捕食行為的模擬。PSO采用“速度-位置”搜索方式,將粒子看作只有速度和位置的點,忽略其質(zhì)量和體積的影響。
假設在一個D維的求解空間中,有N個粒子組成一個群體,則粒子的位置和速度坐標分別為:Xi=(xi1,xi2,…,xid),Vi=(vi1,vi2,…,vid)。粒子群的速度和位置更新公式如下:
(2)

文獻[13]通過大量實驗證明,慣性權值w從最大值0.95降到0.2時粒子群的全局搜索和局部搜索能力最強,公式如下:

式中:wmax和wmin是慣性權值的最大值和最小值,g是當前迭代數(shù),G是設置的最大迭代數(shù)。
2.2IPSO-SVM算法實現(xiàn)
PSO優(yōu)化SVM算法在表面肌電信號的模式識別中得到了廣泛的應用,但經(jīng)過大量的實驗發(fā)現(xiàn)PSO-SVM優(yōu)化算法中的粒子容易出現(xiàn)“早熟”現(xiàn)象,即在表面肌電信號的模式識別過程中粒子會聚集在某一特定的位置。文獻[14-19]中對PSO都做了一些改進操作,如:變異、自適應度方差、遺傳退火算法等。
定理1PSO算法的進化過程與粒子速度無關。

(3)
將式(3)進行迭代可以消除速度變量,如式(4)所示:
(4)
上式中剔除了速度變量,不再需要人為設置參數(shù)[-vmin,vmax]的影響,減少了計算量、提高了粒子的搜索效率。所以PSO優(yōu)化方程可化簡為式(5):

(5)
本文提出IPSO-SVM算法,對式(1)中的拉格朗日因子αi進行求解時,αi要同時滿足式(1)中的不等式約束條件和等式約束條件。

(6)
(7)
定理2PSO算法收斂時,個體最優(yōu)值Pdbest等于群體最優(yōu)值Pgbest。
文獻[21]中通過嚴格的數(shù)學證明,假設粒子收斂于某一固定的位置,則有如下結論:
式中:a=C1/(C1+C2),假設學習因子C1=C2=2,則等式為:
由于等式中Pdbest和Pgbest都是隨時間不斷更新的粒子,即當有新的位置優(yōu)于個體極值或有新的位置優(yōu)于全局極值時,Pdbest和Pgbest就會被新位置取代。假設粒子群最終收斂時全局極值為P*,則有:
從而個體極值Pdbest將按照式(8)逐漸靠攏P*,則有:
以上的證明為PSO算法“早熟”收斂提供了理論基礎,本文依據(jù)ESE狀態(tài)估計策略提出了改進的PSO算法“早熟”收斂的判斷方法,如圖2所示。
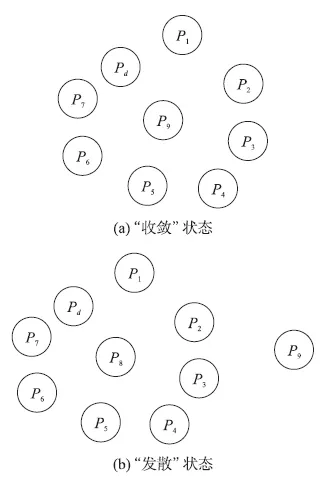
圖2 “收斂”狀態(tài)和“發(fā)散”狀態(tài)
在每一代的進化中都要計算每個粒子Pi到其他粒子之間的平均距離,若當前代中全局最優(yōu)粒子Pg計算出的平均距離小于其他粒子計算出的平均距離,則表明粒子是處于逐漸收斂的狀態(tài),如圖2(a)所示;反之,則為圖2(b)所示的發(fā)散狀態(tài)。
當PSO算法的進化狀態(tài)為“收斂”時,IPSO算法中引入新的一項不僅使種群充分地分散在解空間而且提高了算法全局搜索能力,因此式(5)調(diào)整為:

(8)
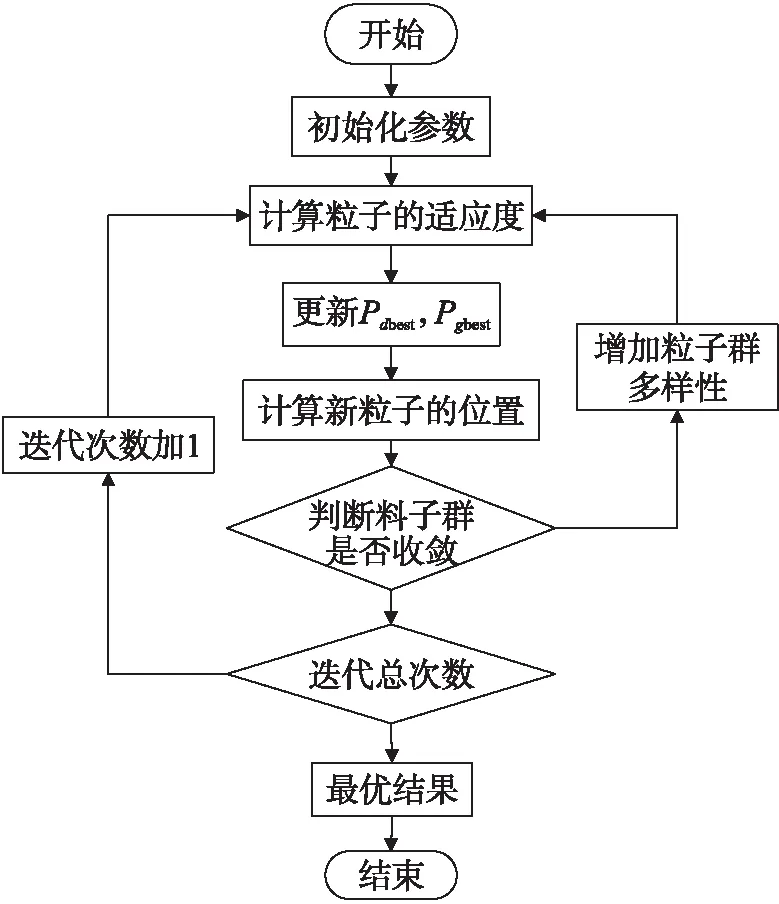
圖3 IPSO-SVM算法流程圖
2.3IPSO-SVM實現(xiàn)過程
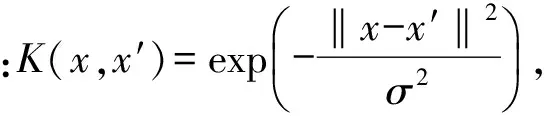
表面肌電信號動作模式識別的重點是優(yōu)化SVM算法中的懲罰參數(shù)C和徑向基參數(shù)σ,合適的參數(shù)C和σ可以有效的提高模式識別的精度。如圖3所示,為IPSO-SVM算法流程圖。
(1)初始化
①對常數(shù)進行初始化:m,C,C1,C2,C3,G,wmax,wmin,m為種群數(shù);
(2)最優(yōu)化:
①更新慣性權值w;
④當粒子群出現(xiàn)“早熟”收斂時,根據(jù)式(8)增加種群粒子的多樣性,并跳轉到第3步;
⑤迭代次數(shù)t+1,跳轉到第1步,繼續(xù)搜索;
(3)輸出最優(yōu)解,算法結束。
3 實驗結果分析
本實驗采用ZJE-Ⅱ型表面肌電信號采集卡,采樣頻率為1 024 Hz。選擇肱橈肌、尺側腕屈肌、掌長肌三塊肌肉設計6種手臂運動模式(握拳、展拳、內(nèi)旋、外旋、屈腕、伸腕),如圖4所示。每種動作包含5 000個采樣數(shù)據(jù)點,分別采用切比雪夫帶通濾波器和切比雪夫帶阻濾波器對肌電信號進行消噪處理。圖5為消噪后的握拳表面肌電信號。

圖4 6種手臂運動模式
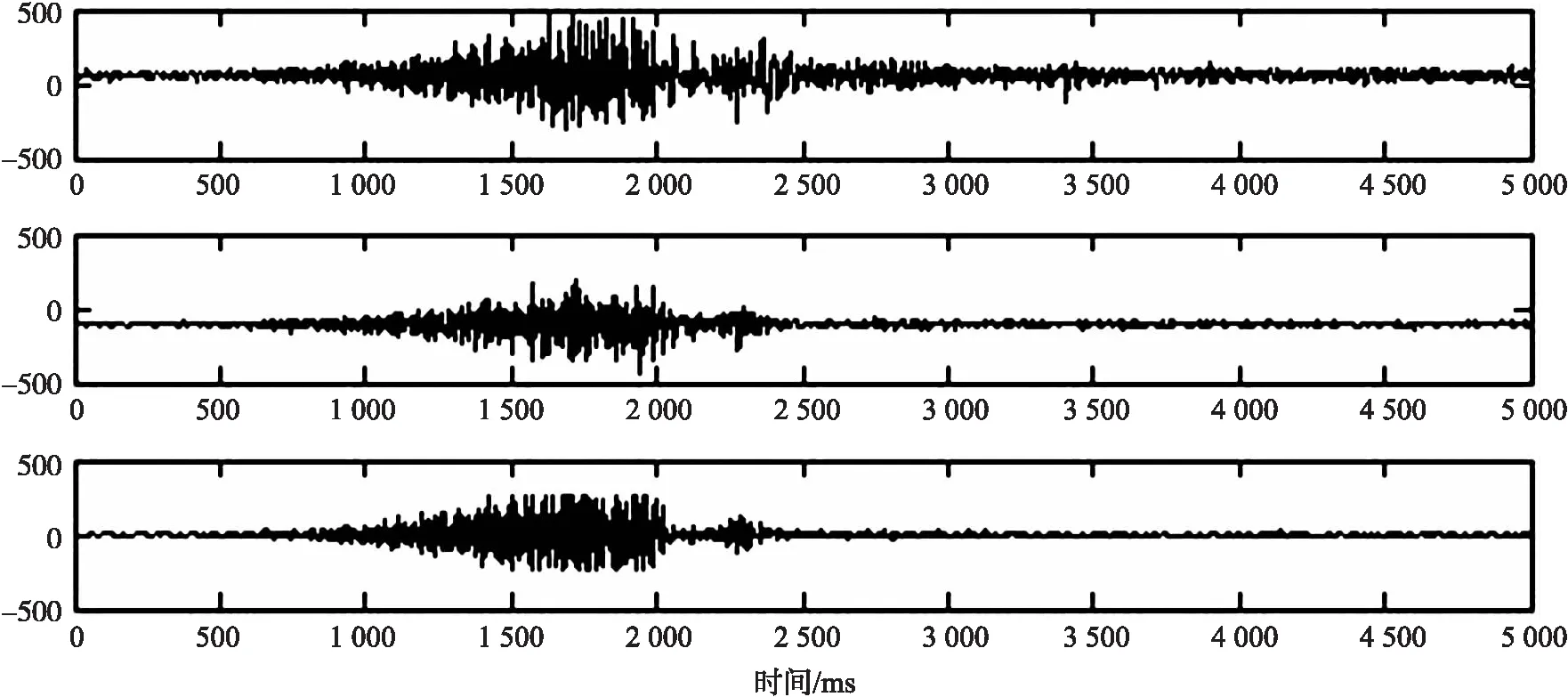
圖5 握拳表面肌電信號
實驗對象為8名健康的志愿者,其中5名男性3名女性,年齡在21到24歲之間。讓他們在非疲勞狀態(tài)下做6類動作模式各25組,則有6×200組表面肌電信號,其中6×120組信號作為訓練信號用來建立算法模式識別模型,6×80作為算法泛化能力的驗證信號。本文采用MATLAB軟件對6類手臂動作進行模式識別仿真,特征值采用小波包變換法,將計算出的協(xié)方差矩陣特征值的最大值作為特征值,這樣3路信號可組成一個1×3的矩陣。實驗結果將與傳統(tǒng)SVM、LIBSVM、PSO-SVM、GA-SVM這4種最新的模式識別算法進行比較,其中最大迭代次數(shù)為100次,粒子群數(shù)量為40,遺傳算法的交叉率為0.8,變異率為0.2。圖6算法的訓練時間與圖7算法的泛化時間,采用tic函數(shù)和toc函數(shù)分別判斷程序開始和結束的時間。通過圖6和圖7的結果可以發(fā)現(xiàn):將遺傳算法(GA)和粒子群算法(PSO)融合到支持向量機(SVM)中可以減少算法訓練時間。因為GA算法對數(shù)據(jù)進行組合交叉和變異操作將適應度差的淘汰,而保留適應度高的形成新的種群;PSO算法采用速度和位置兩個變量,通過記憶項、自身認知項和群體認知項不斷更新新粒子的位置和速度,但后期都會陷入“早熟”收斂。而采用改進的IPSO優(yōu)化SVM可以更加有效的縮減訓練時間加快訓練速度,同時在算法的泛化能力上也有較大的提高。理論上的原因是:IPSO算法只依靠位置變量Xi進行更新避免了人為設置速度變量[-vmin,vmax]范圍的約束;ESE狀態(tài)估計策略能夠較好的判斷粒子群的“早熟”收斂狀態(tài);粒子群的“早熟”收斂狀態(tài)出現(xiàn)時,通過增加公式項提高粒子群的多樣性。
如圖8和表1所示,IPSO-SVM算法在表面肌電信號的模式識別中具有較高的準確率,6種動作模式的平均準確率為93.75%,而傳統(tǒng)SVM算法的平均準確率為70.21%,與GA-SVM、PSO-SVM相比較提高了4%~5%。綜合來看,IPSO-SVM算法模型的泛化時間和模式識別的準確率具有較大的優(yōu)勢。
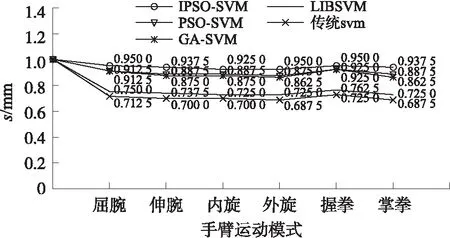
圖8 4種算法模式識別準確率
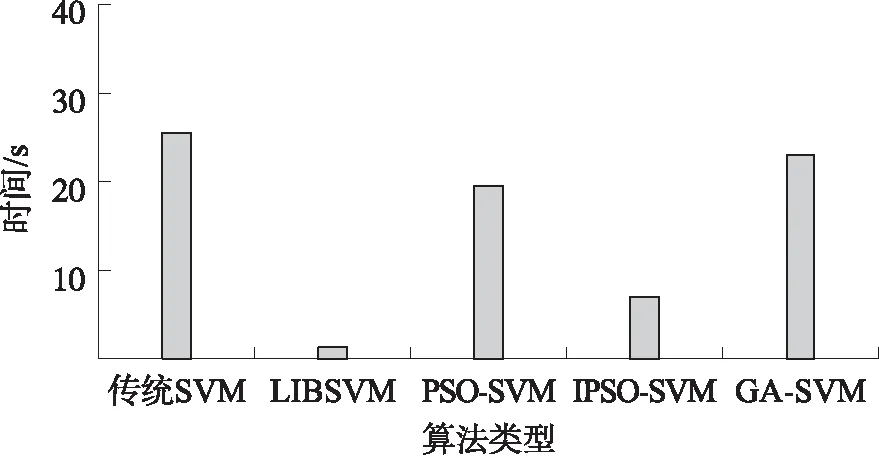
圖6 4種算法的訓練時間
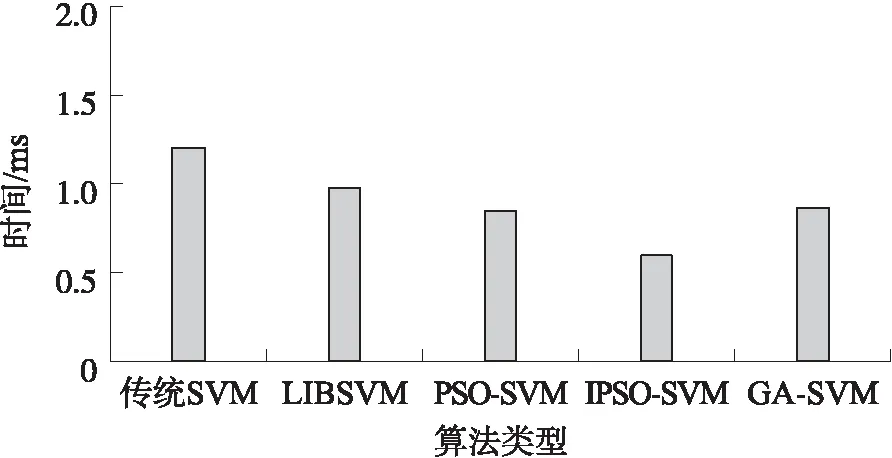
圖7 4種算法的泛化時間
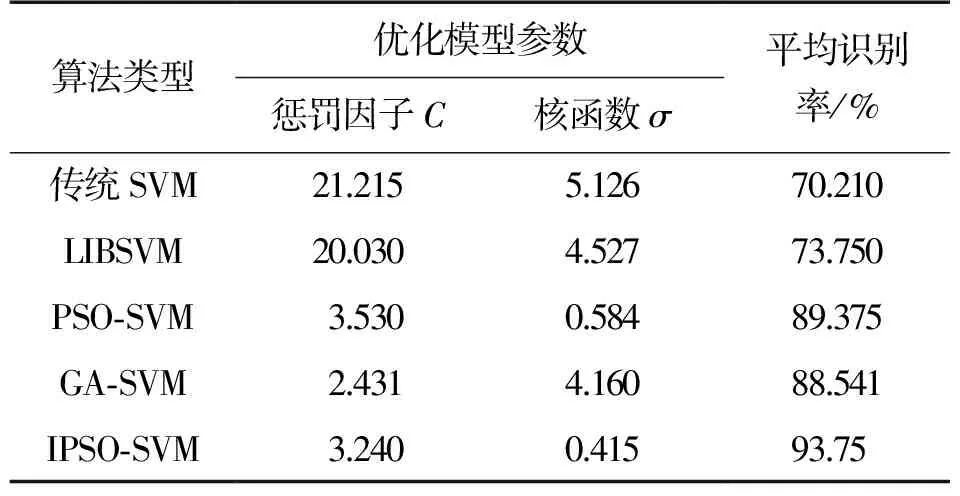
表1 5種算法的結果對比
4 結論
IPSO-SVM算法在表面肌電信號的模式識別這一新的領域中具有很好的應用效果,對6種手臂運動(握拳、展拳、內(nèi)旋、外旋、屈腕、伸腕)模式識別的平均準確率達到93.75%,解決了粒子群“早熟”收斂問題且算法的泛化能力也有較大提高,為遙操作機械手在核設備領域的應用奠定了基礎。但算法仍有不足,如圖6所示LIBSVM算法在訓練時間上明顯較低,是因為LIBSVM算法中應用了caching和shrinking簡化軟件,所以IPSO-SVM算法接下來可以嘗試將caching和shrinking等軟件進行融入。
[1] Byrd J S,Devries K R. A 6-Legged Telerobot for Nuclear Applications Developpment[J]. International Journal of Robotics Research,1990,9(2):43-52.
[2] Desbats P,Geffard F,Pioplain G,et al. Force-Feedback Teleoperation of an Industrial Robot in a Nuclear Spent Fuel Reprocessing Plant[J]. Industrial Robot,2006,33(3):178-186.
[3] Iborra A,Pastor J A,Alvarez B,et al. Robots in Radioactive Environments[J]. IEEE Robotics and Automation Magazine,2003,10(4):12-22.
[4] Raj K,Prasad K K,Bansal N K. Radioactive Waste Management Practices in India[J]. Nuclear Engineering and Design,2006,236(7/8):914-930.
[5] Seungho K,Seung H J. Application of Robotics for the Nuclear Power Plants in Korea[C]//1st International Conference on Applied Robotics for the Power Industry. Piscataway,NJ,USA:IEEE,2010:Spp.
[6] 張啟忠,席旭剛,羅志增. 基于表面肌電信號形態(tài)特征的多模式識別研究[J]. 傳感技術學報,2012,25(12):1636-1642.
[7] 王玲. 基于小波包變換的表面肌電信號模式識別[J]. 現(xiàn)代電子技術,2011,34(17):122-124,128.
[8] 武昊,席旭剛,羅志增. 基于熵和PSO優(yōu)化SVM的肌電信號跌倒識別[J]. 傳感技術學報,2015,28(11):1586-1590.
[9] 田雨波,朱人杰,薛權祥. 粒子群優(yōu)化算法中慣性權重的研究進展[J]. 計算機工程與應用,2008,44(23):39-41.
[10] 姜云飛,林笠. 用布爾代數(shù)求解最小碰集[J]. 計算機學報,2003,26(8):920-924.
[11] 王維博,馮全源. 基于分層多子群的混沌粒子群優(yōu)化算法[J]. 控制與決策,2010,25(11):1663-1668.
[12] 孫湘,周大為,張希望. 一種混沌粒子群算法[J]. 計算機工程與科學,2010,32(12):85-88.
[13] Suganthan P N. Particle Swarm Optimiser with Neighborhood Operator[C]//Proc of the Congress on Evolutionary Computation,Washington DC,1999:1958-1962.
[14] Agrawal M,Mishra M,Kushwah S P S. Association Rules Optimization Using Improved PSO Algorithm[C]//2015 International Conference on Communication Networks(ICCN),Gwalior,2015:395-398.
[15] Liu S,Hou M,Zhu G,et al. An Improved PSO Algorithm for Flexible Load Dispatch[C]//2014 IEEE PES Asia-Pacific Power and Energy Engineering Conference(APPEEC),Hong Kong,2014:1-6.
[16] 呂振肅,侯志榮. 自適應變異的粒子群優(yōu)化算法[J]. 電子學報,2004,34(3):416-420.
[17] 侯志榮. 基于退火策略的粒子群優(yōu)化算法[A]. 中國自動化學會智能自動化專業(yè)委會.200年中國智能自動化會議論文集(下冊)[C]//中國自動化學會智能自動化專業(yè)委員會,2003:5.
[18] 王佳佳,高發(fā)榮,孫曜,等. 基于sEMG的行走步態(tài)非均勻特性及其對識別的影響[J]. 傳感技術學報,2016,29(3):384-389.
[19] 武昊,席旭剛,羅志增. 基于熵和PSO優(yōu)化SVM的肌電信號跌倒識別[J]. 傳感技術學報,2015,28(11):1586-1590.
[20] Tan L. A ClusteringK-Means Algorithm Based on Improved PSO Algorithm[C]//2015 Fifth International Conference on Communication Systems and Network Technologies,Gwalior,2015:940-944.
[21] 王振武,孫佳駿,尹成峰. 改進粒子群算法優(yōu)化的支持向量機及其應用[J]. 哈爾濱工程大學學報,2016,37(12):1728-1733.
ASupportVectorMachineBasedonanImprovedParticleSwarmOptimizationAlgorithmforSEMGSignalPatternRecognition*
GUMingliang1,LIUJun2*
(1.Shanghai Dianji University,School of Electrical,Shanghai 201306,China;2.Shanghai Dianji University,School of Mechanical,Shanghai 201306,China)
In order to improve the motion pattern recognition rate of EMG signals,this paper proposes an improved PSO algorithm to optimize SVM(IPSO-SVM). Firstly,IPSO-SVM introduces a way to simplify the position and velocity formulas of PSO,then proposes ESE state estimation for premature convergence,and finally adopts 5 test algorithms to classify the six hand motion patterns recognition(fist clenching,fist unfolding,internal and external rotation,wrist intorsion and wrist extorsion). The results showed that the average accuracy rate of IPSO-SVM is 93.75% and the average accuracy of traditional SVM algorithm is 70.21%;the training and testing time were also obviously reduced. It also has strong robustness and noise immunity. Therefore,the IPSO-SVM algorithm can be used to solve the classification problem of the surface EMG signal,which has a good application value.
surface electromyography signal;pattern recognition;particle swarm optimization algorithm;support vector machine
TP24
A
1004-1699(2017)10-1459-06
10.3969/j.issn.1004-1699.2017.10.001
顧明亮(1992-),男,碩士研究生,研究方向為智能電氣控制,1010762220@qq.com;

劉俊(1971-),女,副教授,研究方向為機電一體化(智能機器人—視覺傳感與位姿控制),junl99@163.com。
猜你喜歡
房地產(chǎn)導刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導向(2021年7期)2021-07-16 07:07:52
中學生數(shù)理化(高中版.高二數(shù)學)(2021年12期)2021-04-26 07:43:48
中學生數(shù)理化(高中版.高考數(shù)學)(2021年12期)2021-03-08 01:28:50
中成藥(2018年2期)2018-05-09 07:19:52
電子測試(2017年23期)2017-04-04 05:06:50
智能系統(tǒng)學報(2017年5期)2017-01-22 11:21:30
海軍航空大學學報(2015年1期)2015-11-11 17:17:57
現(xiàn)代企業(yè)(2015年2期)2015-02-28 18:45:09
