同步發電機非線性勵磁系統模糊滑模控制研究
2017-11-03 15:55:11閔國君
自動化儀表 2017年10期
陳 金,張 孝,王 平,閔國君,梁 鈴,陳 峰
(1.貴州電網有限責任公司電力調度控制中心,貴州 貴陽 550002;2.南京南瑞繼保工程技術有限公司電網應用部,江蘇 南京 211102)
同步發電機非線性勵磁系統模糊滑模控制研究
陳 金1,張 孝2,王 平1,閔國君2,梁 鈴1,陳 峰2
(1.貴州電網有限責任公司電力調度控制中心,貴州 貴陽550002;2.南京南瑞繼保工程技術有限公司電網應用部,江蘇 南京211102)
同步發電機勵磁系統是一個具有時變性、多時滯環節以及高度非線性的復雜控制系統,其運行是否可靠直接影響到整個電力系統運行的穩定性。因此,對發電機勵磁系統進行有效的控制至關重要。針對發電機勵磁系統運行時的動靜態性能要求,提出一種模糊滑模復合控制策略。滑模控制以其對干擾和攝動的不變性等優點,可以有效地解決發電機勵磁控制的魯棒性問題,并可保證系統的全局漸進穩定性;同時,采用指數趨近律的方法,可以使系統在趨近運動段快速到達切換面。模糊控制能夠模仿人的經驗對復雜對象進行專家控制。將其應用于勵磁控制中,可以提供更佳的阻尼效果,減少滑模運動產生的抖振,提高擾動下的動態品質。為驗證算法效果,利用MATLAB進行仿真。仿真結果表明,與單純的滑模控制相比,該控制算法可加快發電機勵磁系統的響應速度,增強魯棒性,有效地提高了電力系統的穩定性。
同步發電機; 非線性; 勵磁系統; 模糊控制; 滑模控制; 復合控制; 自適應; MATLAB
0 引言
為應對發電機勵磁系統的非線性與時變性,具有較強自適應、自學習能力的智能控制技術,在發電機勵磁系統控制中已得到越來越多的應用[1-6]。文獻[7]采用規則自適應模糊控制,改善了勵磁系統的穩定性,但其穩態精度低,不適用于復雜系統。文獻[8]將神經網絡應用于勵磁控制,自適應能力強,但計算量大,且不能保證收斂。文獻[9]將專家控制用于勵磁系統,控制處理靈活,但自學習能力差。文獻[10]采用迭代學習控制,可以處理勵磁系統非線性、時變性問題,但當存在噪聲或非重復性干擾時,系統穩定性會降低。
因此,針對上述控制方法存在的問題,本文提出了一種結合模糊和滑模的復合控制方法,將其應用于勵磁系統。MATLAB仿真結果驗證了所提方法的有效性和可行性。
1 勵磁控制系統模型
同步發電機勵磁控制系統通常由勵磁調節器、功率放大單元、同步發電機和電壓測量單元等部件組成。
發電機勵磁系統模型如圖1所示。
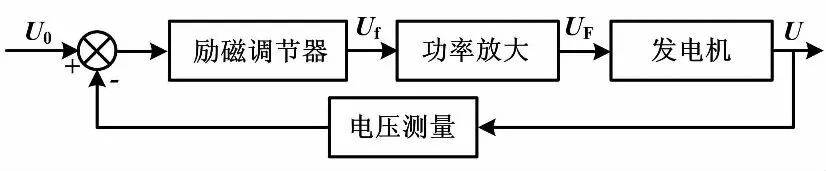
圖1 發電機勵磁系統模型框圖
圖1中:U0為發電機參考電壓;Uf為勵磁電壓;UF為發電機輸入勵磁電壓;U為發電機機端電壓。
本文對同步發電機勵磁控制系統進行適當的簡化。以勵磁系統動態特性為基礎,各單元簡化模型如下。
1.1同步發電機模型
忽略發電機磁路飽和現象,同步發電機的數學模型可以簡化為一階滯后環節,其傳遞函數為:
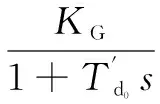
(1)

1.2功率放大單元模型
勵磁調節器輸出的控制信號Uf經過功率放大單元,輸出滿足發電機輸入要求的信號UF。其數學模型可以簡化為一階慣性環節,其傳遞函數為:
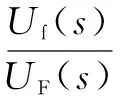
(2)
式中:Kp為電壓放大系數;Tp為電壓放大時間常數。
1.3電壓測量單元模型
同步發電機輸出電壓U經過電壓測量單元得到勵磁調節器輸入信號,其數學模型可以簡化為一階慣性環節。其傳遞函數為:
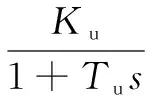
(3)
式中:Ku為比例系數;Tu為濾波回路時間常數。
2 模糊滑模勵磁控制器的設計
控制器以同步發電機機端電壓的誤差作為控制器的輸入。滑模控制(slidingmodecontrol,SMC)器以發電機機端電壓的誤差及其積分項作為狀態變量,具有較強的魯棒性;同時,在趨近運動段采用指數趨近律,可快速跟蹤給定信號。模糊控制器(fuzzycontroller,FC)對發電機機端電壓的誤差及其變化率進行模糊化處理,并經過反模糊化得到模糊控制器的輸出。滑模變結構控制器的輸出和模糊控制器的輸出共同組成了模糊滑模控制器的輸出控制量,再經過功率放大后施加在發電機勵磁系統。
模糊滑模控制器結構如圖2所示。
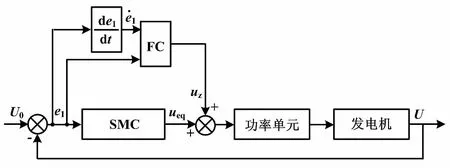
圖2 模糊滑模控制器結構圖
2.1滑模變結構控制器的設計
為了適應發電機勵磁系統較強的非線性,采用具有良好魯棒性的滑模控制方法,以發電機機端電壓的誤差及其積分項作為系統的狀態變量:
(4)
式中:U0為發電機參考電壓;U為發電機機端電壓。
結合式(1),并對式(4)求導數,可得:
(5)

本文在常規滑模面的基礎上加入狀態量的積分量,可以得到積分滑模面為:
s=e1+ce2
(6)
選取積分初始值I0為:

(7)
式中:x0為x1的初始狀態;I0為積分初始值;c為積分常數,c>0。
對式(6)求導數,可得:
(8)
為使系統的動態品質更佳,采用指數趨近律來設計控制器,其表達式為:

(9)
式中:ζ>0;k>0。
系統采用等效控制法來減小切換控制量的幅值,其滑模控制量為:
u=ueq+uz
(10)
式中:u為滑模控制相;ueq為滑模等效控制部分;uz為滑模切換控制部分。
系統在s=0時所需要的控制量就是滑模等效控制部分ueq,用來控制發電機勵磁控制系統的勵磁電壓,則:

(11)
為了使系統狀態趨向滑模面,滑模切換控制部分uz通過高頻切換控制,可以保證狀態變量運行到滑模面,并沿滑模面滑動,直到平衡點,且使系統具有很強的魯棒性。其表達式為:
uz=-ζsgn(s)
(12)
由此可得:
(13)
通過Lyapunov函數,證明系統的穩定性。

將式(9)代入式(13),可得:

(14)

2.2模糊控制器的設計
模糊控制器的輸入是發電機機端電壓的誤差及其變化率,作模糊化處理后通過模糊推理和反模糊化得到模糊控制器的輸出。本設計通過模糊控制器實現滑模切換控制,削弱了滑模控制中的抖振,同時提高了系統的穩定性,動態品質較高。系統輸入、輸出模糊集定義如下[11]:
s={NBNMNSZOPSPMPB}

uz={NBNMNSZOPSPMPB}
①模糊規則和模糊推理。
模糊控制規則如表1所示[12]。
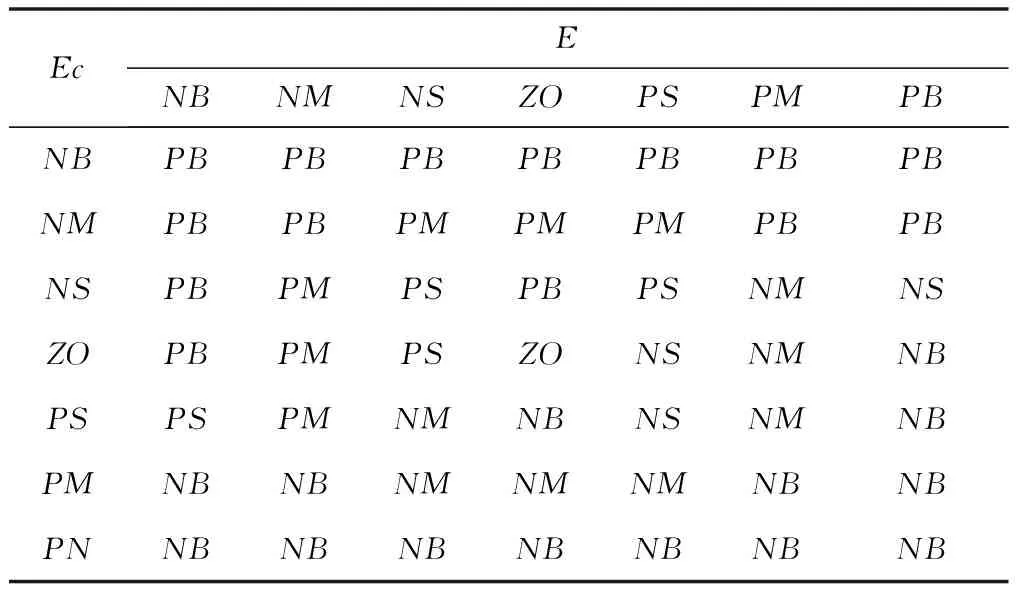
表1 模糊控制規則

模糊推理采用雙輸入單輸出的控制結構,定義如下:
②反模糊化。
根據以上推理規則,采用重心法,可得去模糊化后模糊控制器的輸出為:

(15)
式中:μi為第i條規則的隸屬度;ci為第i條規則輸出的中心點。
3 仿真研究

針對系統受到3%階躍擾動先下后上的情況和線路三相短路延遲切除的情況進行仿真,仿真結果對比如圖3所示。
由圖3可以看出:單純地采用滑模變結構控制時,系統超調量較大且穩定后存在抖振現象;而采用模糊滑模變結構控制算法,系統響應速度加快,魯棒性較強,且可以很好地抑制抖振。
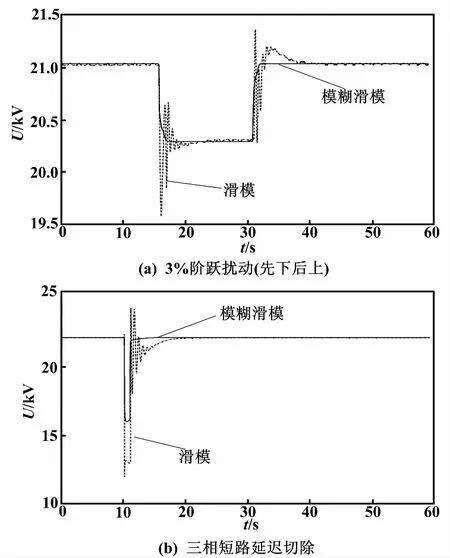
圖3 仿真結果對比圖
4 結束語
本文提出一種模糊滑模控制方法。為了提高系統的響應速度,在滑模趨近運動段采用指數趨近律,并采用模糊控制實現對滑模切換的時機和切換量的控制,使系統的抖振及魯棒性得以改善。與其他進化算法相比,模糊滑模控制算法無需精確的系統數學模型,魯棒性好、響應速度快、自適應能力強,特別適用于發電機勵磁系統。
以貴州某電廠發電機組參數為基礎進行仿真。仿真結果對比證明了模糊滑模控制算法應用于同步發電機非線性勵磁控制系統的有效性。模糊滑模作為一種有效的非線性勵磁控制新方法,對開展同步發電機勵磁系統仿真研究與設計,具有重要的應用價值和廣闊的工程應用前景。
[1] 湯輝.復合勵磁永磁同步發電機勵磁控制策略的研究[D].長沙:湖南大學,2013.
[2]JOHANM,SJOERDWH.Ridethroughofwindturbineswithdoubly-fedinductiongeneratorduringavoltagedip[J].IEEETransactiononEnergyConversion,2005,20(1):435-441.
[3]EKANAYAKEJB,HOLDSWORTHL,WUX,etal.Dynamicmodelingofdoublyfedinductiongeneratorwindturbines[J].IEEETransactionsonPowerSystems,2003,18(2):803-809.
[4] 徐果薇.同步發電機勵磁系統的智能控制方法研究[D].重慶:重慶交通大學,2014.
[5] 孫慧芳,朱翔,王海.汽車線控轉向系統的模糊滑模控制研究[J].自動化儀表,2017,38(1):29-33.
[6]MULLERS,DEICKEM,DONCKERRW.Doublyfedinductiongeneratorsystemsforwindturbines[J].IEEEIndustryApplicationMagazine,2002,8(3):26-33.
[7] 楊靜.發電機并聯運行仿真及勵磁系統的自適應控制研究[D].南京:南京郵電大學,2015.
[8] 楊蘋,周少雄,胡斌,等.雙饋風力發電機系統的自抗擾神經網絡的勵磁控制[J].控制理論與應用,2012(2):251-256.
[9] 程啟明,程尹曼,薛陽,等.同步發電機勵磁控制方法的發展與展望[J].電力自動化設備,2012(5):108-117.
[10]徐敏,林輝.基于迭代學習控制理論的勵磁控制器設計[J].電力自動化設備,2006,26(3):69-72.
[11]王春梅,李紅,張麗瓊,等.基于飽和函數的永磁同步直線電機模糊速度控制系統的研究[J].煤礦機械,2012,33(11):71-73.
[12]蔡滿軍,侯威,王琳,等.永磁同步直線電機基于推力觀測器的模糊滑模控制[J].微電機,2014,47(5):50-53.
StudyofFuzzySlidingModeControlforSynchronousGeneratorNonlinearExcitationSystem
CHEN Jin1,ZHANG Xiao2,WANG Ping1,MIN Guojun2,LIANG Ling1,CHEN Feng2
(1.Power Grid Dispatching Control Center of Gui Zhou Power Grid,Guiyang550002,China;2.Grid Application Department of NR Engineering Technology Co.,Ltd.,Nanjing211102,China)
Synchronous generator excitation system is a complex control system with time-varying,multi-time-delay and highly nonlinear.The reliability of its operation directly affects the stability of the whole power system.Therefore,it is important to control the excitation system effectively.In order to solve this problem,a fuzzy sliding mode compound control strategy is proposed to meet the dynamic and static performance requirements of the generator excitation system.Sliding mode control can effectively solve the robustness problem of generator excitation control and ensure the global asymptotic stability of the system,with the advantages of its invariance of disturbance and perturbation.At the same time,the method of exponential convergence law can be used to make the system reach the switching surface quickly in the approaching motion section.Fuzzy control applied to the excitation control can mimic people’s experience to carry out expert control of complex objects,provide better damping effect,reduce the sliding mode movement of the buffeting phenomenon, and improve the dynamic quality under the disturbance.MATLAB is used to simulate to verify the effect of the algorithm.The results show that,compared with the simple sliding mode control,the proposed algorithm can improve the response speed of the generator excitation system,enhance the robustness and improve the stability of power system effectively.
Synchronous generator; Nonlinear; Excitation system; Fuzzy control; Sliding mode control; Compound control; Self-adaption; MATLAB
if (E is A) and (Ecis B) then (k is C)
TH113.1;TP273+.3
10.16086/j.cnki.issn1000-0380.201710002
修改稿收到日期:2017-06-06
國家自然科學基金資助項目(51505213)
陳金(1980—),女,碩士,高級工程師,主要從事電力調度自動化技術的研究。E-mailzdhxlj@njit.edu.cn。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
故事作文·高年級(2021年12期)2021-12-21 02:32:35
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
大電機技術(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
智能建筑電氣技術(2015年5期)2015-12-10 05:52:30
