潛艇圍殼舵和首舵水動力性能比較
2017-11-03 16:26:28丁自友龔仕奇王支林王先洲馮大奎
艦船科學技術 2017年10期
關鍵詞:模型
丁自友,龔仕奇,王支林,王先洲,馮大奎
(華中科技大學 船舶與海洋工程學院,湖北 武漢 430074)
潛艇圍殼舵和首舵水動力性能比較
丁自友,龔仕奇,王支林,王先洲,馮大奎
(華中科技大學 船舶與海洋工程學院,湖北 武漢 430074)
安裝在潛艇上的首部水平舵位置對于潛艇在垂直方向的穩定性以及操縱性具有重大意義。本文首先通過Fluent 14.0計算Suboff模型的阻力以及DTMB舵型的升、阻力,仿真結果與實驗結果吻合較好。然后計算帶圍殼舵Suboff潛艇和帶首舵Suboff潛艇的阻力、升力特性,并比較了潛艇帶首舵和圍殼舵的升阻力特性差異,以及對艇體表面壓力分布和尾部流場的影響。計算結果顯示,相同舵角下,圍殼舵和首舵阻力相差不大,圍殼舵升力比首舵升力大。相同舵角下,潛艇總阻力相差不大,帶首舵潛艇總升力、總力矩比帶圍殼舵潛艇總升力、總力矩大。圍殼舵舵角的變化對艇體表面的壓力變化影響相對首舵來說較小。圍殼舵和首舵在較大舵角下,都會對尾水平舵產生顯著影響。
圍殼舵;首舵;水動力性能;Suboff;數值仿真
劉明靜[6]對帶首舵和帶圍殼舵潛艇的流場進行數值模擬,結果表明在采用較好的流線型指揮室的情況下,采用首舵形式有利于尾部伴流場的均勻性。趙鵬偉[9]基于湍流強度和耗散率對潛艇尾流進行模擬。
但是絕大部分研究并沒有考慮首操縱面的影響。舵安裝在首部或者圍殼處對整艇影響不同。本文使用數值仿真方法來研究舵安裝在首部和圍殼處的水動力性能,來流速度為5.93 kn和16 kn。在研究帶有舵的模型前,先對Suboff和DTMB舵進行數值模擬驗證。然后對帶舵模型進行研究,并對仿真結果以及結果產生的原因進行了詳細討論和分析。
1 控制方程和RNG k-ε湍流模型
對于不可壓縮粘性湍流,使用RANS方程和RNG k-ε來封閉方程。在控制方程中[7],不可壓縮流體連續性方程如下:

RANS方程有如下形式:

湍動能方程:

湍動能耗散方程:

2 數值計算
2.1 CFD計算模型
本研究不帶首舵或圍殼舵的模型是全附體Suboff模型。Suboff模型的詳細尺寸見文獻[8]。安裝在首部或圍殼處的舵來自文獻[9]。舵由于安裝在Suboff模型上,將其縮放至平均弦長為0.145 m。舵的基本參數如表1所示,舵形狀如圖1所示。帶有舵的模型如圖2示。舵桿為圓柱體,半徑為4 mm。首舵舵桿中心點投影在中縱剖面的坐標為(0,0.6,0.13)。根弦面距離中縱剖面為0.225 m。圍殼舵的舵桿中心點投影在中縱剖面的坐標為(0,1.05,0.353 62)。根弦面距離中縱剖面為0.043 3 m。

表1 舵的參數Tab. 1 The main parameter of the rudder

圖1 舵外形Fig. 1 The figure of the rudder

圖2 Suboff+首舵和Suboff+圍殼舵Fig. 2 SUBOFF+bow rudder and SUBOFF+sail rudder
本文中的系數全部無因次化。舵的阻力、升力系數表達式如下所示:阻力系數

升力系數

系數定義中,A是中縱剖面投影面積。
Suboff帶舵模型的阻力、升力、力矩系數定義如下:
阻力系數

升力系數

力矩系數

式中:S為Suboff帶舵模型的濕表面積。力矩中心點坐標為在潛艇軸線上(0,2.178,0) ,L為艇長。
2.2 計算域和邊界條件
計算域和邊界條件如圖3所示,計算域為圓柱體,長5L(L為Suboff全長),直徑為10 d(d為Suboff最大直徑)。中心軸與艇體中心軸重合,進流面距離首部1 L,出流面距離尾部為3 L。
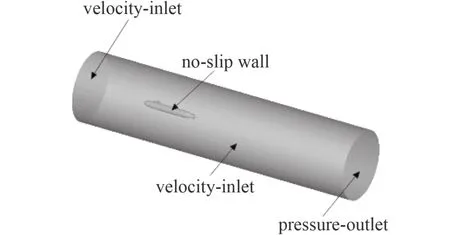
圖3 計算流域圖以及邊界條件Fig. 3 Computational domain and boundary condition
坐標軸系統:來流沿著y軸正向,升力方向沿著z軸,縱傾力矩沿著x軸。數值模擬使用有限體積法,RNG k-ε湍流模型。壓力方程使用標準格式進行離散化。動量方程、湍流動方程和雷諾應力運輸方程使用二階迎風格式進行離散化。
2.3 數值方法驗證和網格獨立性
在計算帶舵模型前,對數值模擬方法進行驗證。使用Suboff模型和舵模型來進行驗證,計算結果與實驗數據[9–10]進行比較。數值模擬使用結構化網格,為了有效模擬近壁面的流動,壁面處采用邊界層網格加密。無量綱化的從第1層網格到壁面的距離y+,平均值為40。
根據網格獨立性驗證,最后選擇400萬網格作為后續研究的基本網格。帶首舵的Suboff潛艇模型總網格量為744萬,帶圍殼舵的Suboff潛艇模型總網格量為798萬。安裝圍殼舵和首舵后,盡量保證網格分布和邊界層與基本網格一致。400萬網格Suboff在16 kn下總阻力為677.6 N,與實驗數據675.6 N誤差為0.3%。舵平均弦長為0.145 m,來流為16 kn,雷諾數為1.193×106。舵數值模擬的升力系數、阻力系數和實驗數據吻合良好。不過應該注意文獻[9]強調舵模型安裝在平板上,因此有效展弦比近似為幾何展弦比的2倍。
3 計算結果和分析
3.1 首舵和圍殼舵升阻力特性分析
數值仿真的來流速度分為低速5.93 kn和高速16 kn。由于首舵、圍殼舵在來流速度為5.93 kn和16 kn時的阻力、升力系數變化規律相同。因此只給出來流速度為16 kn時,圍殼舵和首舵阻力、升力的計算結果對比如圖4示。因此下面用來進行分析的結果取自16 kn時的計算結果。

圖4 阻力、升力系數比較,v=16 knFig. 4 Comparison of drag, lift coefficient, v=16 kn
首舵和圍殼舵的阻力系數相差較小。圍殼舵的升力比首舵的升力大,最大相對增量為53.4%,此時攻角為–5°。圍殼舵安裝在圍殼上,圍殼平坦的中部面和圍殼舵一起組成反映面,也即產生鏡面效應。這導致圍殼舵的實效展弦比近似為幾何展弦比的2倍。在失速角前,翼的展弦比越大,升力系數越大,因為展弦比越大,相比低展弦比翼型,可以更加有效抑制橫向流動。
在翼遭遇翼地效應以及維持不變的升力系數,上洗、下洗以及梢尾渦減弱。由于梢尾渦的減弱,處在翼地效應中的翼將會表現出好像展弦比增大一般。翼處在翼地效應中和不處在翼地效應中的升力與攻角關系如圖5所示。失速角的下降和翼型有關。但是一般有幾度。由于展弦比較小,下洗嚴重。導致低展弦比翼的有效攻角減下,從而傾向于在更大角度失速,相比較于大展弦比翼。圍殼舵有效展弦比的增加以及由于艇體和圍殼舵之間產生的輕微翼地效應,使得圍殼舵的失速與首舵和敞水舵相比提前。

圖5 翼有無翼地效應的升力和攻角關系Fig. 5 The wing in and out of ground effect
3.2 潛艇帶舵模型計算結果和分析
總阻力、總升力、總力矩計算結果的對比如圖6~圖7所示。由于來流速度5.93 kn和來流速度16 kn的變化規律基本相同。接下來的分析使用來流速度為16 kn時的結果。
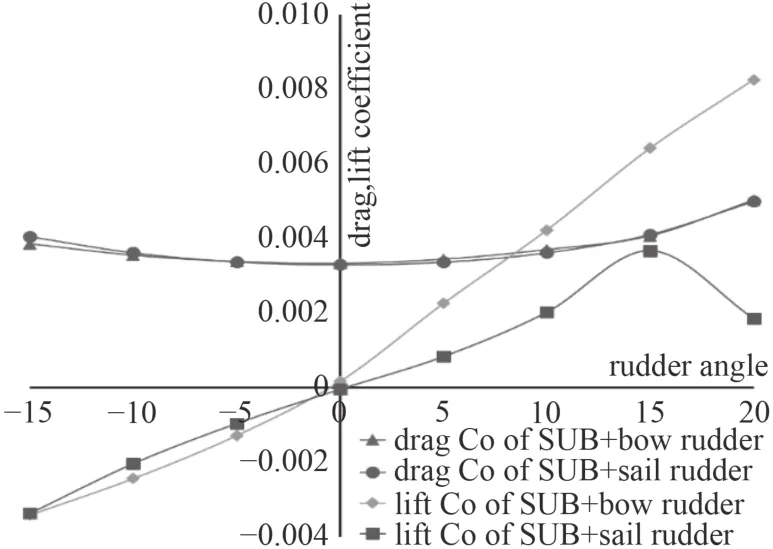
圖6 總阻力、總升力系數對比,v=16 knFig. 6 Comparison of total drag, lift coefficient, v=16 kn

圖7 總力矩系數對比,v=16 knFig. 7 Comparison of total moment coefficient, v=16 kn
Suboff帶圍殼舵模型的總阻力和Suboff帶首舵模型的總阻力相差很小。Suboff帶首舵模型的總升力、總力矩比Suboff帶圍殼舵模型的總升力、總力矩大。當舵角為5°時,升力最大相對增量為171.5%,
3.3 轉舵對流場的影響
接下來將從轉舵對光艇壓力分布以及尾流場影響來分析轉首舵時總升力比轉圍殼舵時總升力大的原因。升力主要由于壓差產生,由于粘性產生的升力非常小且基本相同。由上述討論可知,圍殼舵升力比首舵升力大。
轉首舵時光艇體、圍殼和尾翼的升力和轉圍殼舵時光艇體、圍殼和尾翼的升力的比較如圖8所示。光艇體的升力隨著圍殼舵舵角的增加減小。當首舵舵角為負值時,光艇體的升力變化較小,當舵角為正值時,光艇體的升力隨著舵角的增加而增加,這是首舵安裝位置,對光艇的影響表現出不對稱極其明顯。

圖8 光艇體、圍殼和尾翼的升力,v=16 knFig. 8 Lift of hull, sail, tail, v=16 kn
圖9 和圖10顯示當首舵舵角為–15°~15°艇體表面壓力分布。圖9和圖10中艇體1、2處壓力都表現出明顯的變化。首舵舵角為–15°時,1處的壓力變化產生負升力。2處壓力變化產生正升力。這導致首舵舵角為–15°時光艇體升力和首舵舵角為0°時光艇體升力相對變化較小。首舵舵角為15°時,1處的壓力變化產生正升力。2處壓力變化產生正升力。這導致首舵舵角為15°時光艇體升力比首舵舵角為0°時光艇體升力大。15°時光艇體升力相對于0°時光艇體升力增大254%,且是從負升力變為正升力。

圖9 Suboof+首舵模型壓力分布,舵角為–15°Fig. 9 Pressure distribution of the Suboof+ bow rudder model, bow rudder angle –15°

圖10 Suboof+首舵模型壓力分布,舵角為15°Fig. 10 Pressure distribution of the Suboof+ bow rudder model,bow rudder angle 15°
圖9 和圖10中2處都有沿艇長方向的的壓力變化,圖10中2處壓力變化尤其明顯。圖11顯示當首舵舵角為15°時的渦結構。切面用渦強度進行染色。一系列渦強度的切面可以很好地反映首舵由于轉角度產生的側緣渦的發展過程。隨著舵角增大,上表面和下表面的壓差變大,下洗翻卷運動更加嚴重。因此側緣渦延伸更遠。首舵根弦面產生的側緣渦貼近艇體表面,從而導致圖10中2處壓力明顯的變化。
由于圍殼舵所在安裝位置,正負角度對光艇影響有略微不同,差異不明顯。選取圍殼舵舵角為15°進行分析。圖12顯示艇體表面壓力分布,此時圍殼舵舵角15°。圖12中,圍殼舵表現為引導來流沖擊光艇與圍殼交界處,引起1處壓力發生及其明顯的變化。2處壓力變化,也是由于圍殼舵轉角度所產生的側緣渦引起的。渦結構圖如圖13示,由于圍殼舵離艇體相對較遠,側緣渦對艇體表面壓力影響相對較小。1處的壓力變化產生負升力,且1處壓力變化在升力變化中占據主導地位。2處壓力變化產生正升力。從而當圍殼舵舵角為15°時,壓力變化表現為光艇體產生更大負升力。

圖11 渦結構,首舵舵角為15°,Q準則渦量等值面,Q=80Fig. 11 Vortex structure, bow rudder angle 15°, iso-surface of Q-Criteria at Q=80

圖12 Suboof+圍殼舵模型壓力分布,舵角為15°Fig. 12 Pressure distribution of the Suboof+ sail rudder model, sail rudder angle 15°
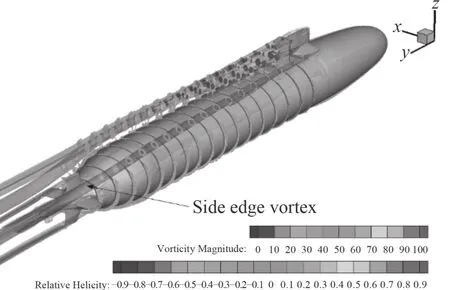
圖13 渦結構,圍殼舵舵角為15°,Q準則渦量等值面,Q=80Fig. 13 Vortex structure, sail rudder angle 15°, iso-surface of Q-Criteria at Q=80
圍殼、尾翼的升力變化相對光艇體的變化較小。但是值得注意尾翼在首舵舵角和尾舵舵角為15°時產生了相對較大的負升力。尾水平舵較大負升力產生的原因均為首舵或者圍殼舵轉角后,產生的側緣渦,發展到尾部引起的,現選取首舵轉角15°情況進行分析。圍殼舵轉角15°,分析情況類似。
圖14和圖15為y=3.8 m切面Y方向速度等值線圖,當首舵舵角為0°和15°時。2個圖表明改變首舵舵角明顯改變了水平尾翼前的的流場。圖16顯示切面(x=–0.2 m)在水平尾翼附近的Y方向速度分布,當首舵舵角為0°和15°時。圖16表明水平尾翼周圍Y方向速度發生變化,尤其是上表面周圍變化明顯。圖17和圖18顯示切面(x=–0.2 m)在水平尾翼周圍壓力分布,當首舵舵角為0°和15°時。圖17和圖18對比表明上表面的壓力發生明顯改變。從而壓力差產生,產生負升力。
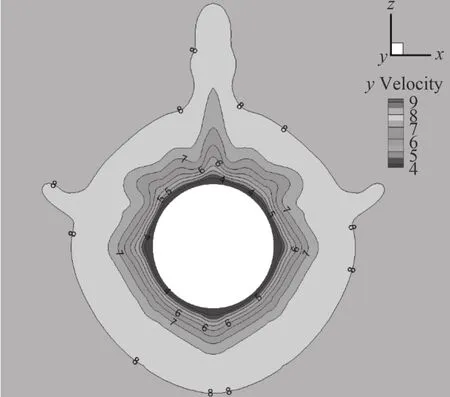
圖14 y=3.8 m切面軸向速度等值圖,首舵舵角為0°Fig. 14 Axial velocity contour at y=3.8 m, bow rudder angle 0°
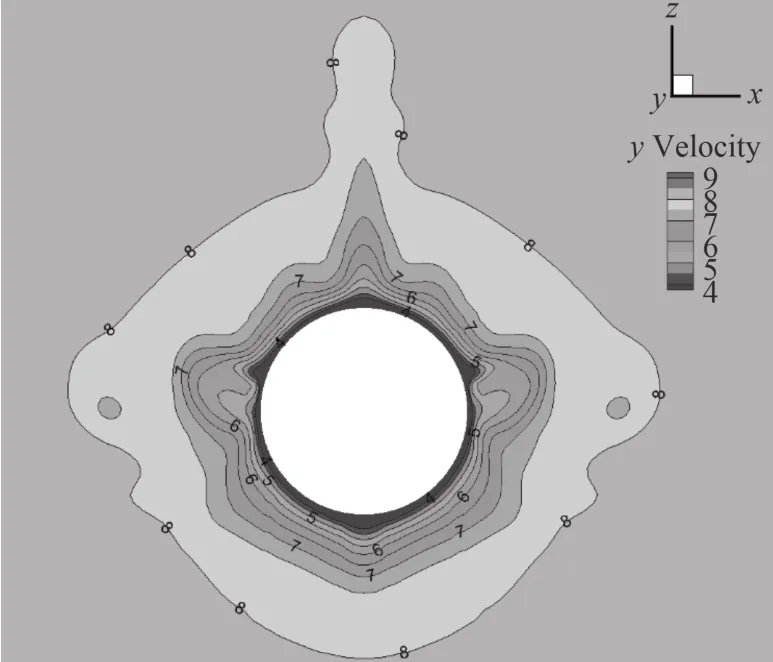
圖15 y=3.8 m切面軸向速度等值圖,首舵舵角為15°Fig. 15 Axial velocity contour at y=3.8 m, bow rudder angle 15°

圖16 2D切面(x=–0.2 m)水平尾翼周圍Y 方向速度分布Fig. 16 2D slice (x=–0.2 m) Y Velocity distribution around horizontal tail

圖17 2D切面(x=–0.2 m) 水平尾翼周圍壓力度分布,首舵舵角為0°Fig. 17 2D slice (x=–0.2 m) pressure distribution around horizontal tail, bow rudder angle 0°

圖18 2D切面(x=–0.2 m) 水平尾翼周圍壓力度分布,首舵舵角為15°Fig. 18 2D slice (x=–0.2 m) pressure distribution around horizontal tail, bow rudder angle 15°
圖11 顯示當首舵舵角為15°時的渦結構。從圖中可以看出首舵產生的側緣渦改變了尾部流場,對于水平尾翼有直接影響。側緣渦導致了水平尾翼周圍Y方向速度分布發生了改變,從而壓力發生改變,產生壓力差,最后產生負升力。
雖然圍殼舵的升力比首舵升力大。在各種因素綜合作用下,轉首舵時Suboff+首舵模型的總升力比在轉圍殼舵時Suboff+圍殼舵模型的總升力大。
4 結 語
將Suboff和DTMB舵的仿真結果與實驗數據進行對比,驗證本文所使用的CFD方法可靠。接下來研究將舵安裝在潛艇不同位置。計算結果顯示圍殼舵升力比首舵升力大,是由于圍殼和圍殼舵構成的反映面模型(即鏡面效應)以及翼地效應造成的。
轉首舵和圍殼舵對于艇體壓力分布有顯著影響。轉首舵對于總的升力有正面影響,而轉圍殼舵對于總的升力有負面影響。因此轉首舵時總升力比轉圍殼舵時總的升力大。首舵和圍殼舵產生的側緣渦對于尾部流場也有較大影響,直接體現在對于水平尾翼周圍流場的影響,當圍殼舵和首舵舵角為15°時,水平尾翼產生相對較大的負升力。
[1]BURCHER R, RYDILL L J. Concepts in submarine design[M]. Cambridge University Press, 1995.
[2]BULL P. The validation of CFD predictions of nominal wake for the SUBOFF fully appended geometry[C]//21st Symposium on Naval Hydrodynamics, June. 1996: 1061–1076.
[3]BENSOW R, PERSSON T, FUREBY C, et al. Large eddy simulation of the viscous flow around submarine hulls[C]//25th ONR Symposium on Naval Hydrodynamics. 2004.
[4]張楠, 沈泓萃, 姚惠之. 潛艇阻力與流場的數值模擬與驗證及艇型的數值優化研究[J]. 船舶力學, 2005, 01: 1–13.
ZHANG Nan, SHEN Hong-cui, YAO Hui-zhi. Validation of numerical simulation on resistance and flow field of submarine and numerical optimization of submarine hull form[J]. Journal of Ship Mechanics, 2005, 01: 1–13.
[5]鄧峰, 戴余良, 陳志法, 等. 基于CFD的水下回轉體高速運動阻力預報精度影響研究[J]. 艦船科學技術, 2016, 38(3):22–26.
DENG Feng, DAI Yu-liang, CHEN Zhi-fa, et al. Research on resistance forecast accuracy of high-speed underwater revolving object based on CFD[J]. Ship Science and Technology, 2016, 38(3): 22–26.
[6]劉明靜, 馬運義, 吳軍. 潛艇艏舵繞流場的數值模擬[J]. 中國艦船研究, 2010, 05: 40–43.
LIU Ming-jing, MA Yun-yi, WU Jun. Numerical simulation on the flow around fore hydroplane of submarine[J]. Chinese Journal of Ship Research, 2010, 05: 40–43.
[7]YAKHOT V, ORSZAG S A. Renormalization-group analysis of turbulence [J]. Physical Review Letters, 1986, 57(14): 1722.
[8]GROVES N C, HUANG T T , CHANG M S. Geometric characteristics of DARPA (Defense Advanced Research Projects Agency) SUBOFF Models (DTRC Model Numbers 5470 and 5471)[R]. David Taylor Research Center Bethesda md Ship Hydromechan-ICS DEPT, 1989.
[9]WHICKER L F, FEHLNER L F. Free-stream characteristics of a family of low-aspect-ratio, all-movable control surfaces for application to ship design[R]. David Taylor Model Basin WASHINGTON DC, 1958.
[10]LIU H L, HUANG T T. Summary of DARPA SUBOFF experimental program data[R]. Naval Surface Warfare Center Card-erock DIV BETHESDA MD Hydromechanics Direc-Torate, 1998.
[11]HURT H H. Aerodynamics for naval aviators [M]. Skyhorse Pub. 1965.
Comparison between hydrodynamic performance of sail rudder and bow rudder on submarine
DING Zi-you, GONG Shi-qi, WANG Zhi-lin, WANG Xian-zhou, FENG Da-kui
(School of Naval Architecture and Ocean Engineering, Huazhong University of Science and Tecnology, Wuhan 430074, China)
Hydrodynamic performance of the fore horizontal rudders installed on the submarine plays an important role on the vertical stability and maneuverability of submarine. At first, the paper uses commercial code fluent 14.0 to calculate the drag of Suboff, the drag, lift of DTMB rudder. Simulation results show good match with experimental results. Then the drag, lift characteristic of Suboff with sail rudder and Suboff with bow rudder are calculated. The difference between them,the influence on the pressure distribution of bare hull and the influence on wake flow field are analyzed. The results show that when rudder angle is the same, the difference between the drag of sail rudder and bow rudder is small. The lift of sail rudder is bigger than that of bow rudder. When rudder angle is the same, the difference of total drag is small, while the total lift and total moment of Suboff+bow rudder is bigger than those of Suboff+sail rudder. The rudder angle change of sail rudder has relatively small influence on the pressure distribution when comparing with that of bow rudder. When rudder angle of bow rudder and sail rudder is big, there will be obvious influence on horizontal tails.
sail rudder;bow rudder;hydrodynamic performance;Suboff;numerical study
U661.1
A
1672 – 7649(2017)10 – 0022 – 07
10.3404/j.issn.1672 – 7649.2017.10.004
0 引 言
在潛艇的概念設計中,潛艇的水動力性能是評價潛艇設計的一個重要指標。因此對于潛艇周圍流場的測量和數值仿真,以及后續的水動力性能預報,在潛艇概念設計過程中很重要。潛艇一般有2對尾舵和1對首舵或圍殼舵。在很多情況下,安裝在潛艇上的首操縱面不可或缺。首操縱面可以獨立控制縱傾和潛深。對于在無縱傾情況下進行潛水或者上浮操作時,首操縱面必需[1]。
為了有助于未來先進潛艇的設計,DARPA對Suboff模型進行了一系列實驗,讓研究者與數值結果進行比較。許多研究者使用數值模擬來研究軸對稱的光艇模型以及帶各種附體模型的流場。Yang[2]計算在高雷諾數下,帶有螺旋槳或者不帶螺旋槳以及帶各種不同附體的軸對稱光艇模型周圍的流場。Bull[2]使用不同的求解器、湍流模型和網格拓撲結構研究Suboff AFF-1和AFF-8周圍的粘性流場。Yang[4]使用Baldwin-Lomax湍流模型模擬Suboff AFF-1和AFF-8在不同攻角下的尾流。Bensow[3]使用大渦模擬方法,研究Suboff AFF-1和AFF-8周圍的流動,并且和實驗數據進行對比。張楠[4]模擬了帶附體時的潛艇繞流,進行艇型的數值優化研究。鄧峰[5]基于CFD對水下回轉體高速運動阻力進行預報,實驗與數值仿真計算吻合較好。
2016 – 11 – 27;
2017 – 02 – 13
丁自友(1993 – ),男,碩士研究生,研究方向為船舶水動力學。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
