虛擬機在艦艇編隊一體化防御系統中的應用
2017-11-03 02:58:47,,,
計算機測量與控制 2017年10期
,,,
(1.西北工業大學 動力與能源學院,西安 710072; 2.航天科技九院200廠,北京 100039)
虛擬機在艦艇編隊一體化防御系統中的應用
侯媛媛1,李江紅1,宮巨濤2,吳亞鋒1
(1.西北工業大學動力與能源學院,西安710072; 2.航天科技九院200廠,北京100039)
面對信息化、遠程精確打擊的空襲作戰,必須構建網絡化、一體化的防空作戰體系;主要針對艦艇編隊一體化防御系統中無線網絡的不可靠性,設計了基于嵌入式虛擬機的架構,提出了任務的動態分配和移植算法;首先根據作戰環境中網絡的拓撲條件,虛擬機動態的將控制任務分配到可靠的無線節點中,并實時監測網絡狀態,當網絡結構發生變化時,將底層不可靠無線節點中的控制任務移植到可靠的無線節點中;通過這種方法可以解決作戰環境惡劣和無線網絡本身的不可靠引起的控制的不穩定性問題,確保防御任務的順利進行;仿真結果表明,當編隊一體化防御系統的鏈路發生故障時,此方法能夠在不改變原有控制算法的基礎上,迅速重建控制構架,不僅適用于艦艇編隊一體化防御系統這種對時間要求和安全性要求高的系統,而且對基于無線網絡的控制系統也有一定的借鑒意義。
嵌入式架構;任務分配;移植;拓撲
0 引言
未來信息化條件下的現代海戰,呈現出立體化、多層次、全方位的特點。艦艇編隊作為海軍作戰的主要兵力,在作戰中面臨著嚴重的空中威脅。信息化技術的飛速發展及其在軍事領域的廣泛應用,使得艦艇編隊的防御表現為以信息網絡為中心的體系間的對抗,協同作戰、自適應和自組織能力則顯得尤為重要。
艦艇編隊防御系統,是指通過以計算機為核心的信息網絡實現作戰部隊、武器系統、信息系統之間交互,從而形成一個統一的整體,充分發揮作戰效能,對來襲目標進行有效抗擊的一種作戰方式。能夠實現信息系統的高度共享和武器資源的協同使用,作戰指揮人員可以高效地綜合運用編隊內各種火力和作戰手段達成編隊防御的目的。
由于作戰環境多變,無線網絡本身的不可靠性[1-2],對任務的執行效率和完成質量會產生影響,嚴重時導致系統失控。針對此現象,本文提出了一種基于嵌入式虛擬機的架構和算法。即在作戰過程中,編隊系統內部結構發生變化,引起網絡的拓撲條件發生變化時,解耦合出底層的不可靠的無線節點中的控制任務,對其進行重新分配或移植,迅速構建控制流,確保控制任務的順利進行。
1 虛擬機
針對作戰環境中無線網絡中的鏈路,節點和拓撲條件本身的不可靠性,本文提出了一個嵌入式的架構,即不是在設計時將控制任務靜態的映射到物理節點中,而是在運行時將它以一個單一部件的形式分配到傳感器、執行器和無線節點中。這種方法可以解耦合底層不可靠物理節點的功能,將任務移植到可靠的物理節點中從而適應編隊一體化防御系統中的網絡拓撲條件的變化,為此引入了虛擬機。
虛擬機(VM)與經典的系統虛擬機不同[3],虛擬機由多個具有存儲和計算能力的無線節點組成,通過無線節點組來維持其控制特性。它明確定義了無線節點中的控制和數據通訊機制。在防御過程中,虛擬機實時監測網絡中無線節點的狀態,虛擬機根據系統中網絡的拓撲條件,動態的將任務進行分配或移植,即對主—從控制器及路由進行選擇,將控制任務分配到不同的無線節點中。虛擬機實現了無線控制網絡和底層不可靠物理鏈路的無縫鏈接。
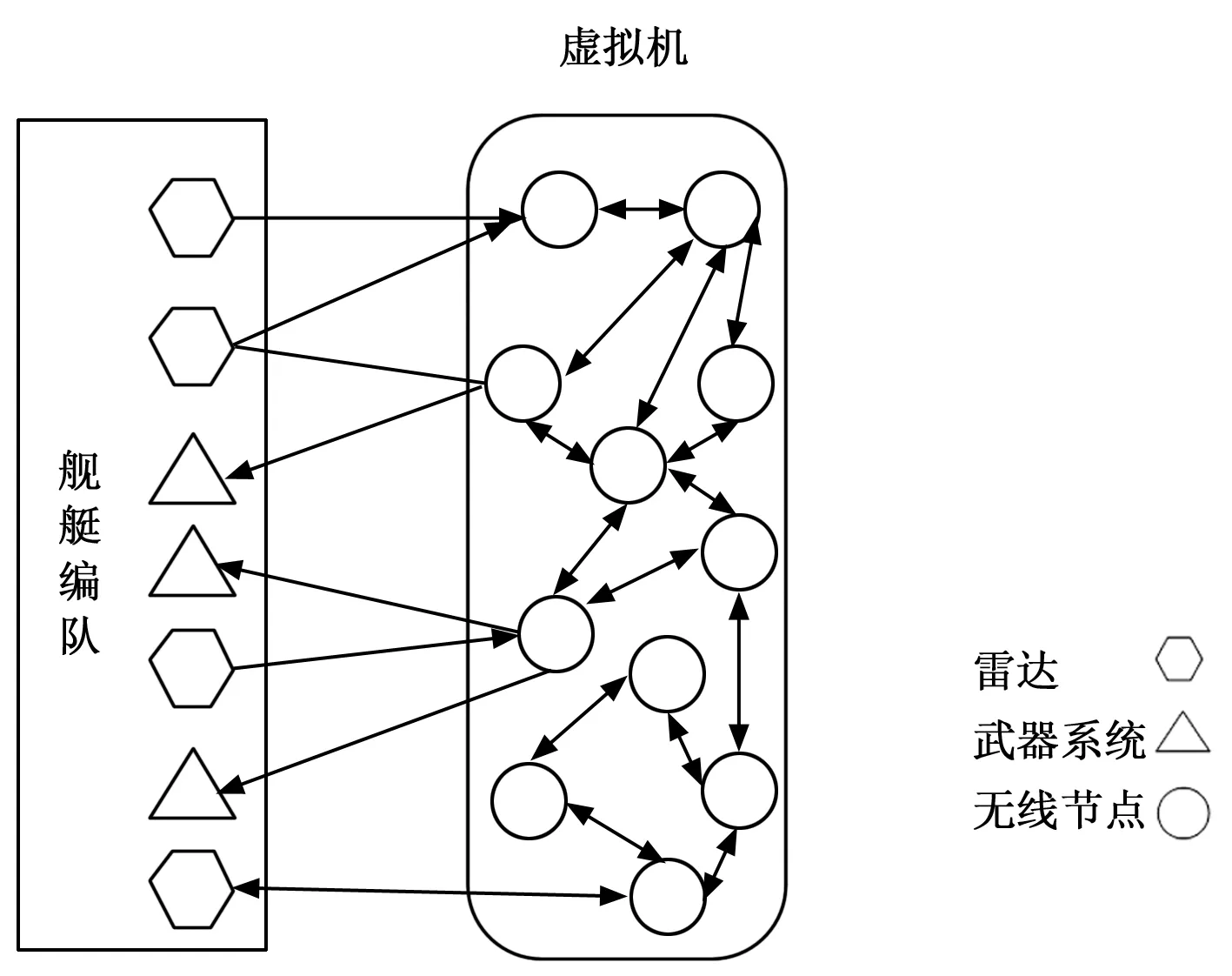
圖1 虛擬機在編隊防御系統中的應用
2 虛擬機中無線節點的架構
為了保證任務在無線節點中能夠任意分配和移植,要求無線節點的參考構架如圖2所示,無線節點運行系統是構建在實時操作系統之上的[4],具體如下:
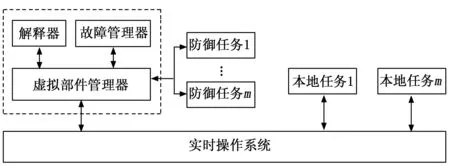
圖2 無線節點的參考架構
此外還對操作系統的功能進行了擴展:
1)支持采樣率的動態變化,可以動態的激活防御任務。
2)支持防御任務的動態分配和移植。
虛擬部件管理器,管理虛擬任務而非本地任務,虛擬任務即動態的分配到本地節點上的防御任務。虛擬部件管理器中包含有解釋器和故障管理器,當防御任務分配到無線節點時,虛擬部件管理器則調用解釋器負責對任務進行解析,它是實時操作系統和防御任務間的接口。故障管理器用于運行時的容錯處理。
虛擬部件管理器的主要功能如下:
1)虛擬任務的移植和激活:當程序發生故障時,會展開任務的移植工作。任務在移植的過程中,虛擬任務描述表以及任務所使用的所有存儲塊將一同被移植。如果在被移植的節點中已經定義了虛擬任務,則只需要交換任務參數即可。另外,在任務移植之前,調度分析儀將對被移植的節點執行網絡和CPU的調度分析。如果沒有可以移植的節點,將返回錯誤并提示系統應添加節點以勝任工作。當任務被定義后,在激活虛擬任務前,所在節點將執行一個本地的網絡和CPU的調度分析,從而確保當前任務不會影響其它的任務的運行。
2)虛擬任務的分配:當新增的或者本地的重新分配故障時,則激活虛擬任務的分配工作,虛擬部件管理則根據編隊系統中的網絡拓撲條件和無線節點初始的通訊和計算調度表對任務進行分配。
3)提供透明的無線傳輸接口:根據包含消息類型的信息頭,虛擬部件管理器則確定了接收消息的任務。接收任務的節點中的虛擬部件管理器首先處理這些消息,然后再激活解釋器,執行任務。
4)邏輯到物理地址的映射:虛擬任務之間是通過虛擬部件管理器進行通訊的。虛擬任務彼此間并不知道其存儲的物理地址,虛擬部件管理器中存儲了邏輯到物理地址的映射關系,當虛擬任務在同一節點上時,虛擬部件管理器直接向接收任務的緩沖區發送消息即可。
本地任務是無線節點中的靜態的任務,主要負責虛擬任務間的通訊,對虛擬任務的管理以及維持操作系統的運行等工作。
3 防御任務的分配和移植
作戰過程中,虛擬機實時監測無線節點組的狀態,無線網絡的拓撲結構,一旦結構發生變化,嵌入式虛擬機則會根據當時的作戰情形,重新部署防御任務。主要包括兩個方面:防御任務的重新分配和移植。
3.1 任務分配
任務分配原則為:
1)確保鏈路質量最大化的同時使所用的鏈路總長度最小。
2)盡量避免使用相交的路徑。
3)最小化共享鏈路的成本。以圖3為例進行說明。
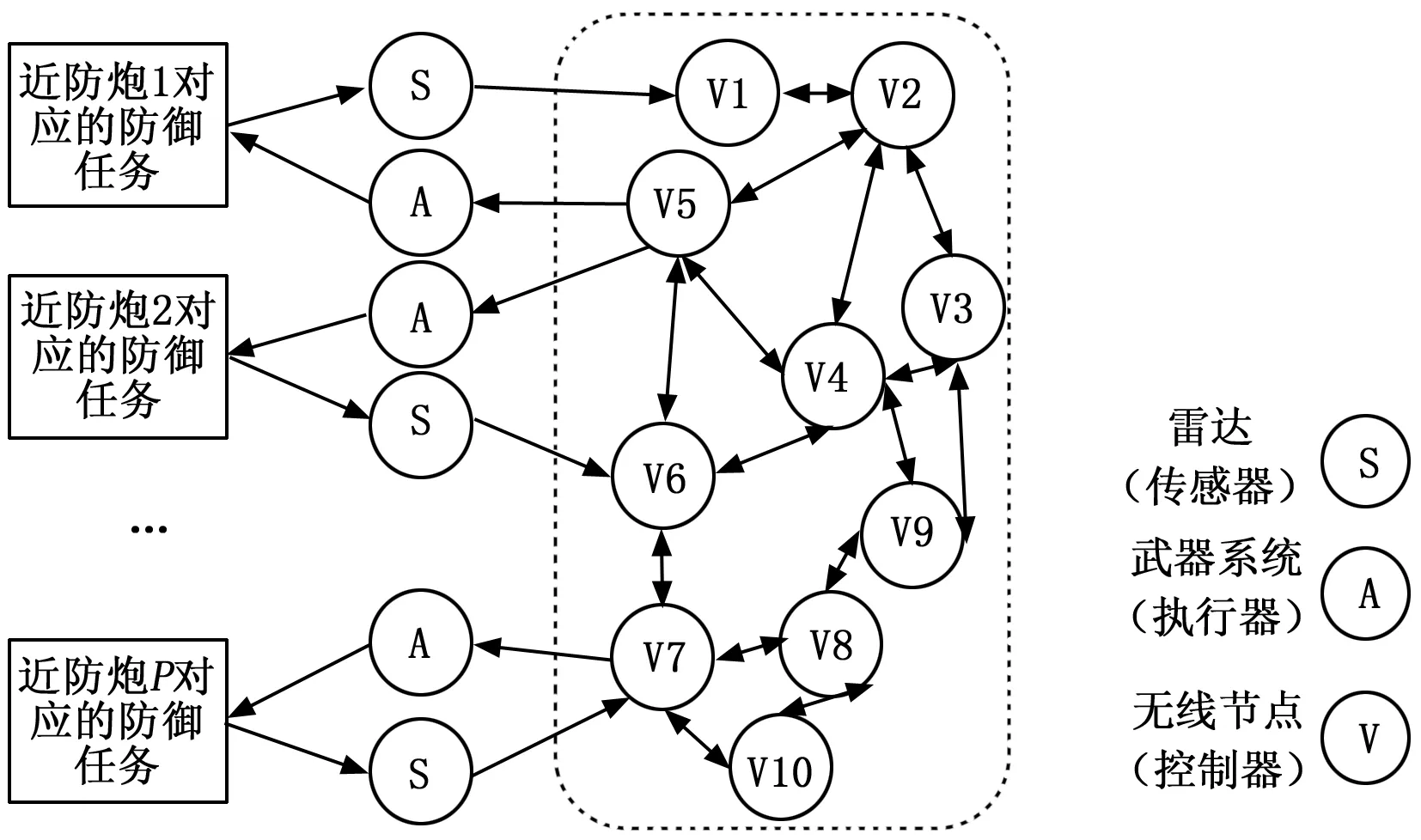
圖3 無線網絡控制的參考模型
圖3中包括m個無線節點和p個控制過程,分別用集合V和J表示。有向邊表示無線網絡的連通性。無線節點間以及無線節點與傳感器和執行器間采用基于TDMA的協議進行通訊。設有以下變量:
(1)
其中:i∈V,j∈J,st∈{a,b},令:
(2)
對應的目標函數為:f(x,y)=w1fLN+w2fLQ+w3fSL。任務的分配問題即為求目標函數的最小值問題,其中w1,w2,w3分別是對應函數的權重。fLN代表鏈路的總數、fLQ代表鏈路總質量的相反數、fSL代表共享鏈路的成本。具體定義如下:
代表無線節點i到魚雷或武器系統k的長度。


為了提高艦艇編隊一體化防御系統的可靠性和及時響應能力,在任務分配時要求:
1)每個防御任務分配到一個主節點和R個從節點,為任務移植提供方便。表達式如下:
高壓柔性直流電網分層協同自適應下垂控制//陶艷,劉天琪,李保宏,苗丹,董語晴,盧智雪//(18):70
2)防御任務的主節點至少與相應的武器系統有兩條路徑可達,防御任務主節點和從節點都必須與它相關的雷達相連。Aj和Sj分別是與第j個防御任務相關的雷達和武器系統。表達式如下:
?j∈J,ka∈Aj,ks∈Sj,?i∈V
一般將任務分配問題看作是一個二進制整形程序最優化問題[5],可以通過分支界限法解決。但在艦艇編隊一體化防御系統中,由于網絡環境相對較為復雜,用上述方法需要進行大量的計算,因此,為了提高系統響應性能,將約束條件寫成合取范式的形式[6],最優化問題則轉化為滿足性問題,可通過SAT求解器求解[7]。
3.2 任務移植
在作戰過程中,無線節點或鏈路隨時可能發生故障,嵌入式虛擬機則保證在不影響原系統工作的前提下,將防御任務從不可靠的無線節點或鏈路中分離出來,移植到可靠的環境中。移植前,將對被移植節點進行通訊和計算的調度分析,確保防御工作的順利進行。

虛擬任務的計算需要消耗時間,計算調度則在保證不影響節點中的任務執行的前提下,能夠按期完成虛擬任務[8]。假設vi執行的任務有T={Ti1,...,Tim,VTi1,...,VTin},Tij為本地的任務,VTij為分配到節點上的虛擬任務。其中虛擬任務的優先級按降序排列。HP_T(VT)是優先級高于虛擬任務的所有本地任務。eVTi代表虛擬任務的執行時間。則虛擬任務對應的時間要求函數[8]如下:
令wVTi(t)=t,若所求的解小于虛擬任務的截止時間,則虛擬任務滿足計算調度要求。
4 虛擬機的設計流
基于虛擬機的架構允許系統在運行時隨著自動設計流的設計對其功能進行擴展,即從Simulink到平臺無關的相關領域的特定語言,再到平臺相關的代碼的產生。三層的設計方案可以使控制工程師專注于控制器的設計,而不需要考慮底層的硬件平臺,協議和架構等。
根據Simulink中控制系統的描述,虛擬機能夠自動地將其轉化為控制系統相對應的功能性的描述,此描述與平臺和節點無關。除了功能性的描述外,虛擬機設計流還可以從Simulink中自動的提取一些輔助的功能屬性,如時間和任務間的相互依賴關系。這些屬性以及對控制系統功能性的描述,共同用來被定義與平臺相關的虛擬任務。
5 仿真
為了證明基于嵌入式虛擬機架構和算法的可行性,對航母編隊一體化防御系統進行了仿真,假設編隊中有1艘航母、2艘護衛艦和1艘驅逐艦。護衛艦和驅逐艦上分別裝有雷達和近防炮。航母、護衛艦和驅逐艦之間通過無線網絡進行通訊,即在編隊中部有無線節點。防御目標是具有蛇形彈道的馬斯基特彈。如圖4(a)所示,其中雷達的輸入為目標位置、航向、速度以及炮筒所在的位置、指向、射速。輸出為兩者的相對參數差。控制器對雷達輸出信息匯總、計算,將控制量炮口方向、發射時機輸出給炮筒執行器,最終對其控制。
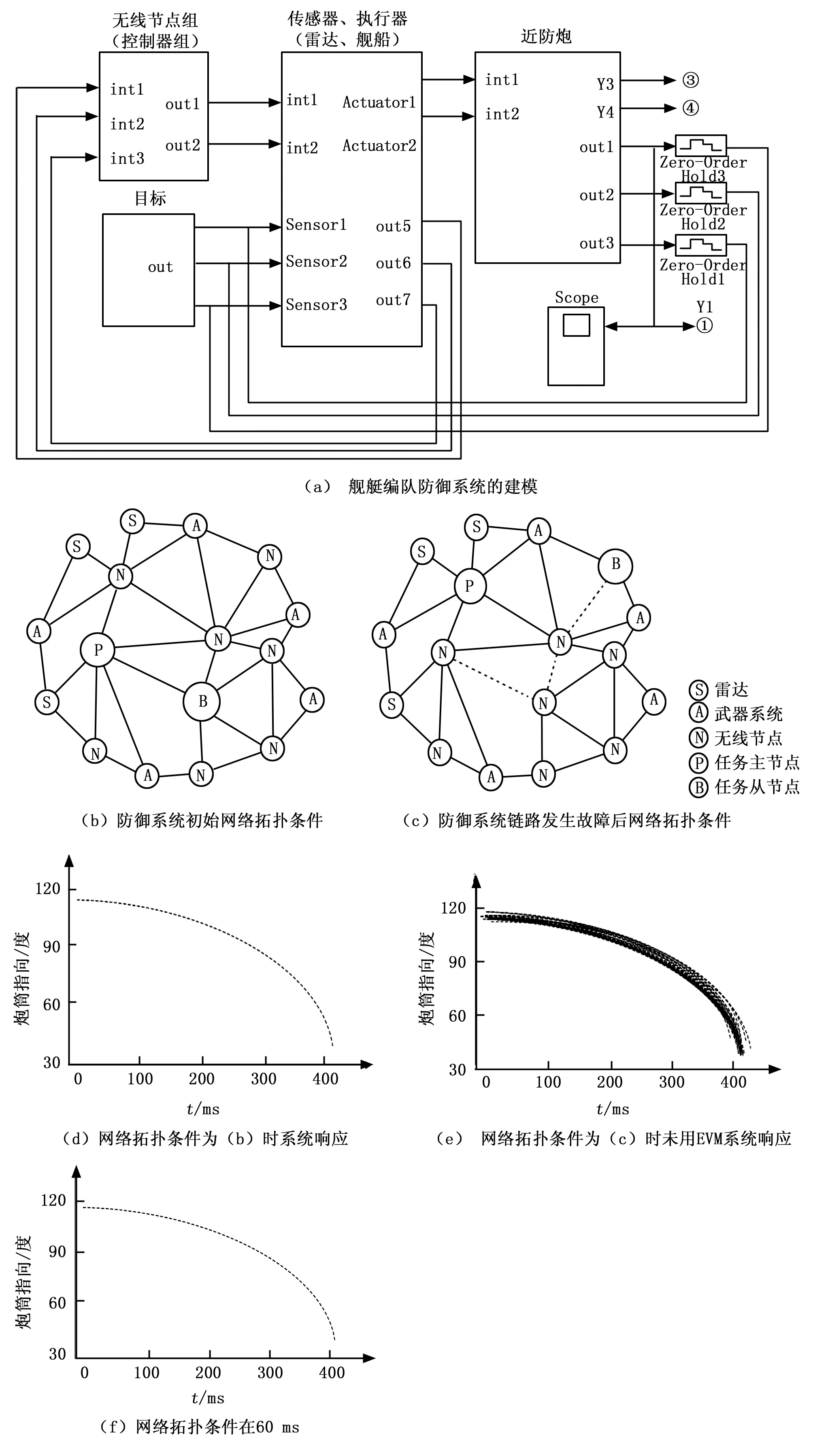
圖4 VM在編隊防御系統中的應用
圖(b)呈現了作戰環境中的網絡的初始拓撲條件以及對應于此條件下,控制任務分配的主節點和從節點。圖(d)初始的拓撲條件下,系統對于不同的輸入的響應(周期為60 ms)。圖(c)是圖(b)發生鏈路故障時的拓撲結構,圖中虛線代表故障鏈路。圖(e)是在鏈路發生故障后,僅僅利用無線網路的自組織能力,重新選擇了路由,而沒有改變主節點和從選節點的位置時的系統響應。由于從所有傳感器到主節點再到所有執行器的通訊時間的增加,導致系統變得不穩定。圖(f)為圖(b)在t=60 ms變為圖(c)后,使用式虛擬機(將任務進行了移植,重新選擇了主從節點和路由)時系統的響應,由圖可以看出,系統響應與初始條件下系統的響應基本一致。
結果證明,通過使用虛擬機,可以實時監測無線網絡中節點和鏈路的狀態,當其發生變化時,解耦合出底層的不可靠節點中的控制任務,將其移植到可靠的無線節點中。嵌入式虛擬機實現了底層不可靠物理設備和控制方法的無縫連接。
6 總結
編隊一體化防御系統的目的是通過網絡綜合集成各種作戰資源,實現體系內的各種作戰要素之間的信息共享和綜合運用,以形成一個體系配套、多武器協調的良好防御體系。將戰爭從“作戰平臺中心戰”轉向“網絡中心戰”。
然而,由于作戰環境惡劣,無線網絡自身的不可靠,節點或鏈路可能發生故障,最終導致通訊失敗,嚴重則造成整個系統不可控。
本文提出的基于嵌入式虛擬機的構架及其分配和移植算法,能夠靈活應對作戰環境,根據網絡的拓撲結構,動態的將控制任務移植或分配到可靠的無線節點中。通過系統仿真證明了此方案的可行性,嵌入式虛擬機實現了控制算法和底層不可靠無線網絡的友好連接,對基于無線網絡的控制算法的研究具有一定的借鑒意義。
[1] Hespanha J P, Naghshtabrizi P, Xu Y. A survey of recent results in networked control systems[A]. Proceedings of the IEEE, Special Issue on Technology of Networked Control Systems[C].2007, 95(1):138-162.
[2] Jiang Z, Pajic M, Moarref S, et al.Modeling and verification of a dual chamber implantable pacemaker[A]. TACAS’12: 18th Conf. on Tools and Algorithms for the Construction and Analysis of Systems[C]. 2012.
[3] 朱 磊,王寶樹.VM技術在傳感器網絡中的應用[A].2005年西電研究生學術年會[C].2005.
[4] nanoRK.Sensor RTOS[EB/OL].http://www.nanork.org, 2010.
[5] Schrijver A. Theory of Linear and Integer Programming[Z]. John Wiley & sons, 1998.
[6] Pajic M, Mangharam R. Embedded virtual machines. Technical report[R]. University of Pennsylvania, 2009.
[7] Fu Z, Mahajan Y, Malik S. New Features of SAT’04 version of zChaff[A].The International Conference on Theory and Applications of Satisfiability Testing[C]. 2004.
[8] Liu J. Real-Time Systems[M]. Prentice Hall, Inc., 2000.
ApplicationofVirtualMachineinWarshipFormationDefenseSystem
Hou Yuanyuan1,Li Jianghong1,Gong Jutao1,Wu Yafeng2
(1.School of Power and Energy,Northwestern Polytechnical University,Xi′an 710072,China;2.Factory No.200,Beijing 100039,China)
In the face of information technology, long-range precision strike air combat, we must build networked, integrated air defense combat system. Due to unreliability of the wireless links and nodes in the warship formation, an embedded architecture is designed. Based on this architecture, a dynamic allocation and transplantation algorithm is proposed. According to the network topology of the operational environment, control task can be dynamically assigned to the wireless node by the virtual machine, and then network state is monitored. Our approach is to decouple the functionality from the inherently unreliable physical substrate and allow tasks to migrate/adapt to changes in the topology. This method can solve the instability problem caused by the bad environment and the wireless network. The simulation results show that when the links fault, it can reconstruct control architecture based on the same control algorithms. This is not only suitable for the integrated defense system of warship formation which is time-critical and safety-critical, but also for the control system based on wireless network.
embedded architecture; task assignment; migrate; topological condition
2017-03-16;
2017-04-18。
侯媛媛(1986-),女,西安人,博士研究生,主要從事航空宇航科學與技術方向的研究。
李江紅(1970-),男,西安人,碩士生導師,主要從事嵌入式計算機、控制理論與工程方向的研究。
1671-4598(2017)10-0158-04
10.16526/j.cnki.11-4762/tp.2017.10.041
TP273
A
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
電子制作(2019年7期)2019-04-25 13:17:14
電子制作(2018年18期)2018-11-14 01:48:16
鐵道通信信號(2018年2期)2018-04-18 12:18:23
家庭影院技術(2017年9期)2017-09-26 03:41:45
電鍍與環保(2016年3期)2017-01-20 08:15:32