網鏈式花生地殘膜回收機設計與試驗
2017-11-01 23:03:54徐弘博胡志超顧峰瑋顏建春
農業工程學報 2017年17期
關鍵詞:作業
徐弘博,胡志超,吳 峰,顧峰瑋,魏 海,顏建春
?
網鏈式花生地殘膜回收機設計與試驗
徐弘博,胡志超※,吳 峰,顧峰瑋,魏 海,顏建春
(農業部南京農業機械化研究所,南京,210014)
針對現有花生地殘膜回收設備存在的漏膜、回膜、纏膜等問題,設計一種網鏈式花生地殘膜回收機,主要工作部件包括挖掘鏟、升運網鏈、碎土輥、雙作用激振裝置、集膜裝置等,可一次性完成挖掘起膜、輸膜、清土和集膜作業。根據升運網鏈的結構特性,建立其殘膜支撐度與土壤通過性的數學模型,通過分析計算驗證了網鏈結構用于殘膜輸送的優勢;設計了可自由浮動的碎土輥,并對其工作壓力進行力學分析,得出其結構參數;運用ADAMS軟件對雙作用激振裝置進行仿真,確定其結構尺寸與振動幅度為25 mm;開發了升運角可調的二級升運網鏈,在完成殘膜輸送的同時可使黏性土塊沿網鏈滾落,對二級升運網鏈的有效分離長度和升運角調節范圍進行了設計;為實現高效卸膜,設計了液壓驅動的集膜裝置,并對液壓缸參數進行了計算校核。田間試驗結果表明,當機具前行速度1.0 m/s、挖掘深度100 mm、一級升運網鏈線速度2.0 m/s、二級升運網鏈線速度2.2 m/s、雙作用激振裝置頻率10 Hz時,收膜率為91.5%,含土率為17.2%,能夠滿足花生地殘膜回收需求。研究方法與結果可為相關裝備研發提供參考。
塑料薄膜;設計;試驗;殘膜回收機;網鏈;分析
0 引 言
地膜覆蓋具有保溫保墑、改善土壤理化性質、提高土壤肥力等作用,能有效提高農作物產量,在中國得到了廣泛應用,近年來中國覆膜種植面積達0.25億hm2,且覆膜面積仍有持續增加趨勢[1-2]。地膜的大量使用在帶來增產增收效果的同時,也對農業生產和生態環境造成了嚴重污染,由于塑料地膜在自然條件下極難降解,又不易回收,導致覆膜農田都遭到不同程度的殘膜污染[3-5]。花生是中國典型覆膜種植作物,在山東、河南、河北等花生主產區的地膜平均殘留量占地膜殘留總量的20%,平均地膜殘留強度達32.0 kg/hm2,且殘留量還在逐年增加,若不盡快得到有效治理,花生地膜殘留強度將很快超過國家農田殘膜限值標準[6-7]。
機械化殘膜回收是治理殘膜污染的重要手段之一,目前針對棉花、玉米、馬鈴薯等作物的殘膜回收設備的研制工作已取得豐富成果[8-12],而花生地殘膜回收設備研發起步晚,適用機型相對匱乏[13-16]。鏈桿式殘膜回收機具有作業效率高、結構緊湊、能回收土下殘膜、膜土分離能力強等優勢,適于多種作物的殘膜回收作業[17],但鏈桿結構在輸膜過程中容易出現漏膜、回膜、纏膜等問題,造成機具收膜率降低,且作業順暢性較差。為提升鏈桿式輸膜部件的作業質量,現有鏈桿結構常與卷膜輥、鼠籠、風機等裝置配合使用[12,18-20],但由于花生地膜較薄,挖掘收獲后地膜破損嚴重,且部分地膜位于地表以下,因此這些裝置用于花生地殘膜回收的效果并不理想。針對上述問題,在對多種輸膜結構進行鑒別的基礎上設計一種網鏈式花生地殘膜回收機,以期解決輸膜部件漏膜、回膜、纏膜等問題,為花生地殘膜回收提供技術手段。研究成果在相似的作業條件下可應用于馬鈴薯、煙草、玉米等作物收獲后的殘膜回收作業,具有較好的借鑒意義和廣泛的應用前景。
1 設計思路及結構原理
1.1 設計思路與整體結構
花生地殘膜主要有以下特點:1)由于地膜過厚將影響花生果針下扎,導致花生減產,因此花生地膜較薄,目前市面上80%以上的花生地膜厚度≤0.008 mm[6];2)花生生長過程中果針下扎導致地膜局部穿孔,造成地膜抗拉強度減弱[21];3)花生屬于土下果實,挖掘收獲后地膜呈縱向撕裂狀態;4)花生收獲方式包括人工、夾持鋪放、挖掘鋪放、半喂入聯合收獲等,根據花生不同的收獲方式,殘膜在土壤中的余量和分布狀態存在較大區別,地表及土下0~100 mm均有可能殘留地膜。
針對上述特征,設計一種網鏈式花生地殘膜回收機,具體結構如圖1所示,主要由牽引架、限深輥、挖掘鏟、一級升運網鏈、二級升運網鏈、側板、集膜裝置、變速箱、地輪等組成。其中,挖掘鏟由鏟面與柵條組成,一級升運網鏈主要由主動鏈輪、從動鏈輪、托輪、雙作用激振裝置、網鏈和碎土輥組成,集膜裝置由集膜框與液壓缸組成。該機型采用挖掘起膜方式,滿足地表及土下0~100 mm殘膜回收要求;采用網鏈結構,保證較薄且破損的花生地膜能夠順暢輸送;采用碎土輥、雙作用激振裝置、前后兩級網鏈組配方式,實現碎土、清土作業。

1.集膜框 2.液壓缸 3.二級升運網鏈傳動系統 4.二級升運網鏈 5.側板 6.一級升運網鏈 7.變速箱 8.一級升運網鏈傳動系統 9.牽引架 10.限深輥 11.挖掘鏟 12.碎土輥 13.雙作用激振裝置傳動系統 14.機架 15.雙作用激振裝置 16.地輪
1.2 工作原理
機具傳動系統如圖2所示,通過三點懸掛方式將牽引架與拖拉機連接,拖拉機后動力輸出軸與變速箱連接,變速箱將動力分別傳遞到一級升運網鏈動力輸入軸和雙作用激振裝置驅動帶輪上,同時一級升運網鏈動力輸入軸將動力傳遞給二級升運網鏈動力輸入軸,碎土輥通過接觸摩擦方式由一級升運網鏈驅動,集膜裝置通過拖拉機液壓輸出系統驅動。
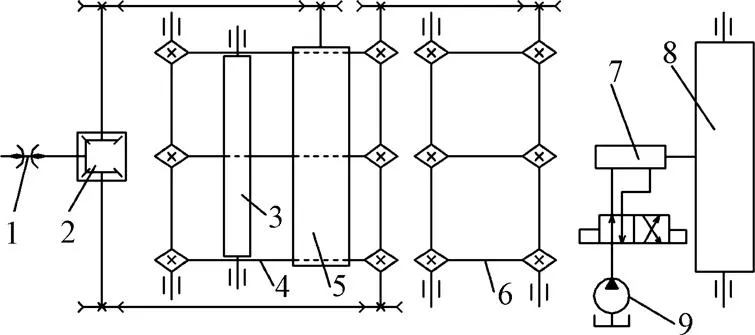
1.傳動軸 2.變速箱 3.碎土輥 4.一級升運網鏈 5.雙作用激振裝置 6.二級升運網鏈 7.液壓缸 8.集膜框 9.拖拉機液壓輸出系統
機具作業時,限深輥在滾動限深的同時對地面土壤實現初步碾壓碎土,挖掘鏟將殘膜與土壤混合物同時鏟起并沿鏟面向上推送,殘膜與土壤混合物經過挖掘鏟柵條時實現初步清土,然后殘膜與土壤混合物進入一級升運網鏈,在碎土輥碾壓、一級升運網鏈輸送和雙作用激振裝置三重作用下,實現殘膜與土壤混合物的碎土和清土,當殘膜與土壤混合物輸送到一級升運網鏈尾端時,沙質土壤已基本清理干凈,只剩下殘膜與少量黏結土塊進入二級升運網鏈,這時二級升運網鏈采用大傾角重力篩分方式使得土塊在自重作用下沿二級升運網鏈向下滾動,而殘膜繼續沿二級升運網鏈向上輸送,完成膜土分離,最后,殘膜輸送至二級升運鏈尾端并被甩入集膜框中,完成殘膜回收作業。卸膜時,液壓缸推動集膜框旋轉90°,殘膜在重力作用下從集膜框中掉落。
1.3 主要技術指標
根據花生覆膜種植模式及殘膜回收機作業質量標準NY/T 1227-2006[22],網鏈式花生地殘膜回收機主要技術指標如表1所示。

表1 主要技術指標
2 主要部件設計與分析
2.1 輸膜部件設計與分析
2.1.1 網鏈結構
輸膜部件是殘膜回收機的主要組成部分,為解決鏈桿式輸膜部件作業時存在的漏膜、回膜、纏膜等問題,從增加輸膜部件支撐度的角度出發,篩選并設計出一種網鏈式輸膜結構,主要由鏈條、串桿和鋼絲網組成,實體結構如圖3所示。采用這種結構以增大殘膜支撐密度,防止殘膜輸送過程中竄入升運鏈內側,從而避免輸膜部件漏膜、回膜、纏膜,同時兼具良好的土壤通過性,便于清土。

圖3 網鏈式輸膜結構
2.1.2 輸膜部件分析
分別從殘膜支撐性能和土壤通過性能的角度對網鏈結構和鏈桿結構進行對比分析。其中鏈桿結構僅由鏈條和串桿組成,網鏈結構在鏈桿結構的基礎上附加了螺距為、絲距為、絲徑為的鋼絲網,令兩種結構的節距相等,串桿直徑均為,網鏈簡化結構如圖4所示。

1.鋼絲網 2.串桿 3.鏈條
1.Steel wire mesh 2.String rod 3.Chain
注:h為鋼絲網螺距,mm;q為鋼絲網絲距,mm;e為鋼絲網絲徑,mm;p為串桿節距,mm;d為串桿直徑,mm;dx為串桿方向的極小位移量,mm;a為任意長度,mm;陰影部分為分析區。
Note: h is screw pitch of steel wire mesh, mm; q is wire interval of steel wire mesh, mm; e is wire diameter of steel wire mesh, mm; p is pitch of string rod, mm; d is diameter of string rod, mm; dx is the minimum displacement in the direction of string rod, mm; a is random length, mm; dash area is the analysis area.
圖4 網鏈簡化結構
Fig.4 Simplified structure of network chain


式中為任意長度,mm;為鋼絲網絲距,mm;為鋼絲網螺距,mm;d為串桿方向的極小位移量,mm;0為分析區內鏈桿結構桿條總長,mm;1為分析區內網鏈結構桿條總長,mm。由式(1)可以得出網鏈結構較鏈桿結構的殘膜支撐度變化率

式中為網鏈結構相對鏈桿結構的殘膜支撐度變化率,%。


選取節距=101.6 mm,串桿直徑=12 mm,網鏈螺距=60 mm,絲距=50.8 mm,絲徑=3 mm的鏈桿和網鏈結構帶入式(2)、(4)進行計算校核。求解可得殘膜支撐度變化率=293.3%,土壤通過性變化率=?13.2%。可以看出網鏈結構的殘膜支撐度較鏈桿結構明顯增加,能夠有效防止漏膜、回膜、纏膜等問題;而土壤通過率僅小幅度降低,對清土功能的影響較小,達到了預期設計目的。
2.2 清土部件設計與計算
由于網鏈式花生地殘膜回收機采用挖掘回收作業方式,因此清土能力是影響作業質量的重要指標之一。從3個角度對其清土部件進行設計:首先,在升運網鏈前端設置碎土輥,將進入升運網鏈的土壤初步碾壓粉碎;其次,在升運網鏈中部設置雙作用激振裝置,實現升運網鏈抖動清土;最后,針對未被一級升運網鏈清理干凈的黏性土塊,采用二級升運網鏈進行篩分。
2.2.1 碎土輥
采用結構如圖5所示的碎土輥在升運鏈前端進行碎土作業,碎土輥由鋼管、搖臂和碎土輥支座組成,工作時在網鏈旋轉作用下依靠摩擦力驅動,通過自身重力實現對土壤的碾壓粉碎,同時碎土輥可圍繞碎土輥支座旋轉,即能保持碎土壓力基本恒定,又防止喂入量過大時發生壅土和損壞。

1.碎土輥支座 2.搖臂 3.鋼管 4.網鏈 5.托輪
1.Support of soil broken roller 2.Rocker 3.Steel tube 4.Network chain 5.Riding wheel
注:ω1和箭頭指向分別為鋼管的轉速和轉動方向;v1和箭頭指向分別為網鏈的線速度和運行方向。
Note: ω1 and arrow point are rotational speed and direction of steel tube; v1 and arrow point are linear velocity and moving direction of network chain.
圖5 碎土輥結構示意圖
Fig.5 Structure diagram of soil broken roller
對碎土輥的作業狀態進行力學分析,計算主要結構參數。如圖6所示,當土壤進入碾壓區后,壓強與土壤壓縮程度成正比[23-24]。則有

注:為鋼管圓心,為土塊與鋼管接觸點,′為碎土過程中土塊與鋼管接觸點,為鋼管與碎土面接觸點,、為、′在線段的垂點,為網鏈升運角,(°);為最大碎土角,rad;為當前碎土角,rad;為鋼管半徑,m。
Note:is the center of the steel tube,is contact point for cold and steel tube,′ is contact point of clod and steel tube in the process of cold breaking,is contact point of steel tube and upper surface of network chain,andis vertical of the linebyand′,is elevation angle of network chain, (°);is maximum soil broken angle, rad;is current soil broken angle, rad;is radius of steel tube.
圖6 碎土壓力分析示意圖
Fig.6 Sketch map of analysis of soil broken pressure
由式(5)可得

由于碎土輥工作時與土壤滾動摩擦,因此忽略碎土輥沿升運鏈方向所受摩擦力,即為無側限擠壓,故碎土所需壓力

式中P為碎土所需壓力,N;d為d所占碎土輥面積,m2;有

將式(6)、(8)帶入式(7),可得

對式(9)進行求解可得碎土所需壓力P=48.9 N。碎土輥采用長度1.56 m,半徑0.084 m,厚度0.005 m的無縫鋼管與封蓋、軸頭焊接而成,重力=350 N,則碎土輥在垂直于升運網鏈方向的實際碎土壓力G=·cos= 303 N,式中為網鏈升運角,為30°。可以看出實際碎土壓力遠大于碎土所需壓力,因此碎土輥滿足碎土要求。
2.2.2 雙作用激振裝置
如圖7所示,雙作用激振裝置由搖臂、擺桿、偏心套、驅動軸、激振軸、支架和激振輪組成。作業時,動力通過皮帶從驅動軸輸入,帶動支架和激振輪周期性運動,使激振輪推動升運網鏈抖動,實現膜土分離作業。這種結構可實現激振輪與升運網鏈之間始終保持接觸式滾動摩擦,避免振動敲擊,提高零部件的使用壽命。為保證膜土充分抖動分離,要求升運網鏈振幅不小于20 mm,應用ADAMS軟件對該激振裝置的振幅進行運動學分析校核[26]。

1.搖臂 2.激振輪 3.激振軸 4.支架 5.偏心套 6.驅動軸 7.擺桿


注:ω和箭頭指向分別為雙作用激振裝置的轉速和轉動方向;O1為搖臂支點;A1為搖臂鉸接點;B1為偏心套位置;C1為偏心套支點;D1為支架鉸接點。

圖9 支架鉸接點D1運動軌跡分析結果
2.2.3 二級升運網鏈
前期實踐發現,對于沙土條件下的花生地殘膜回收作業,采用碎土輥和雙作用激振裝置進行膜土分離效果良好,而土壤條件較差時,集膜箱中存在大量土塊,說明在現有結構參數下無法對抗壓強度較大的黏性土塊實現及時有效的破碎和篩分。為提高機具適應性,在一級升運網鏈后再配置二級升運網鏈,二級升運網鏈的升運角略大于一級升運網鏈,且升運角可通過調節裝置在一定范圍內調整,具體結構如圖10所示。作業時,殘膜和部分土塊從一級升運網鏈末端甩入二級升運網鏈,由于殘膜與網鏈的靜摩擦系數大于土塊與網鏈的滾動摩擦系數,因而殘膜可繼續沿網鏈向后輸出,而土塊則相對于網鏈向下滾動,最終從二級升運網鏈前端脫離,實現膜土分離。

1.從動軸 2.縱向調節裝置 3.機架 4.土塊 5.二級升運網鏈 6.橫向調節裝置 7.驅動軸
1.Driven shaft 2.Longitudinal adjustment device 3.Frame 4.Clod 5.Second stage elevator network chain 6.Transverse adjustment device 7.Drive shaft
注:a2為土塊加速度,m/s2;v2為二級升運網鏈線速度,m/s;γ為二級升運網鏈升運角,(°)。
Note: a2 is accelerated speed of clod, m/s2; v2 is linear velocity of second stage network chain, m/s; γ is elevation angle of second stage network chain, (°).
圖10 二級升運網鏈結構圖
Fig.10 Structure diagram of second stage elevator network chain
二級升運網鏈升運角是影響膜土分離效果的關鍵參數,要使殘膜能夠沿升運鏈上升,而土塊沿升運鏈滾落,則土塊必須在二級升運網鏈上反向加速至超過二級升運網鏈的線速度,假設土塊剛進入二級升運網鏈時,相對于二級升運網鏈運動方向的初速度為0,則有

式中2為土塊沿網鏈方向加速度,m/s2;為重力加速度,9.8 m/s2;為二級升運網鏈升運角,(°);2為二級升運網鏈線速度,取額定值2.2 m/s;為土塊與網鏈的滾動摩擦系數,取0.1[27];2為二級升運網鏈有效分離長度,取0.5 m。

2.3 集膜裝置設計與校核
2.3.1 集膜裝置結構
集膜裝置即能起到收集儲存殘膜的功能,又要便于卸膜,其結構如圖11所示,主要由集膜框和液壓缸組成,其中,集膜框為四面封閉,兩面敞開結構,其中頂面和前面敞開,頂面為正常作業時殘膜入口,前面為卸膜時殘膜出口。集膜框分別與機架和液壓缸鉸鏈連接,液壓缸分別與機架和集膜框鉸鏈連接,液壓缸由拖拉機液壓輸出系統驅動。

1.液壓缸 2.機架 3.集膜框

2.3.2 液壓缸參數設計
集膜裝置通過液壓缸實現卸膜與復位,為保證卸膜與復位功能良好,對液壓缸的尺寸參數與安裝位置進行設計計算。


則液壓缸行程

式中S為液壓缸行程,mm。

注:Gj為集膜框滿載重力,N;Fy為液壓缸最小推力,N;Lj為集膜框滿載重力Gj到支點O2的距離,mm;Ly為液壓缸最小推力Fy到支點O2的距離,mm;虛線為集膜框卸膜狀態;O2點為集膜框在機架上的安裝位置;A2點為液壓缸在機架上的安裝位置;B2點為收膜狀態時液壓缸在集膜框上的安裝位置;B′點為集膜框卸膜狀態時液壓缸在集膜框上的安裝位置。


根據拖拉機液壓系統壓力與推力的關系

式中p為液壓缸額定壓力,取20 MPa;d為液壓缸最小內徑,mm。可以計算出d=21.5 mm。
在上述校核的基礎上,綜合考慮液壓缸穩定性與驅動速度[28],最終選擇液壓缸內徑為30 mm,外徑為50 mm。
3 田間試驗與討論
3.1 試驗條件
2016年10月在江蘇省南京市六合區收獲后的花生地進行網鏈式花生地殘膜回收機收膜試驗,試驗場景如圖13所示。試驗地種植模式為單壟雙行,壟距800 mm,壟高100 mm,花生收獲模式為機具挖掘鋪放-人工撿拾,果秧移出后進行收膜作業,土壤類型為沙壤土,含水率約為13%(0~100 mm土深),所覆地膜為厚度0.008 mm、寬度700 mm白膜。機具由約翰迪爾1054拖拉機帶動,作業深度設為100 mm,考慮到作業質量與經濟效益,機具前行速度定為1.0 m/s,此時一級升運網鏈線速度1=2.0 m/s,二級升運網鏈線速度2=2.2 m/s,雙作用激振裝置振動頻率=10 Hz。

a. 作業過程a. Operation processb. 卸膜過程b. Unloading process
3.2 試驗方法
在試驗地內隨機選取10個測試區進行試驗,每個測試區長度50 m,寬度1.65 m,先通過五點法測定每個試驗區內鋪設地膜的總質量[20],試驗結束后再將集膜箱內的地膜與土壤分別收集稱質量,試驗結果取10次試驗指標的平均值。將收膜率、含土率作為評價指標,計算方法如下[29-30]:
1)收膜率1
式中1為收膜率,%;1為測試區內集膜箱中地膜質量,g;0為測試區內鋪設地膜總質量,g。
2)含土率2

式中2為含土率,%;2為測試區內集膜箱中土壤質量,g。
3.3 試驗結果與討論
網鏈式花生地殘膜回收機收膜試驗結果如表2所示。
由試驗結果可以得出,網鏈式花生地殘膜回收機平均收膜率為91.5%、含土率為17.2%,能夠滿足花生收獲后的殘膜回收作業要求。其網鏈式輸膜結構能夠保證順暢輸膜,作業過程中未出現漏膜、回膜、纏膜等問題;限深輥限深可靠,即保證土下0~100 mm殘膜全部挖掘,又防止挖掘深度過大而發生壅土問題;碎土輥能夠有效實現碾壓碎土功能,升運網鏈上的大土塊明顯減少;雙作用激振裝置運行穩定,土壤在網鏈抖動輸送過程中被加速分離;二級升運網鏈能夠實現土塊向下滾動的同時殘膜繼續向后輸送,實現了黏性土塊的分離工作,同時可對一級升運網鏈還未清理干凈的土壤進行二次清理;液壓驅動的集膜框容量大、卸膜方便快捷,保證了機具作業效率。各部件功能與機具作業效果均達到設計預期。
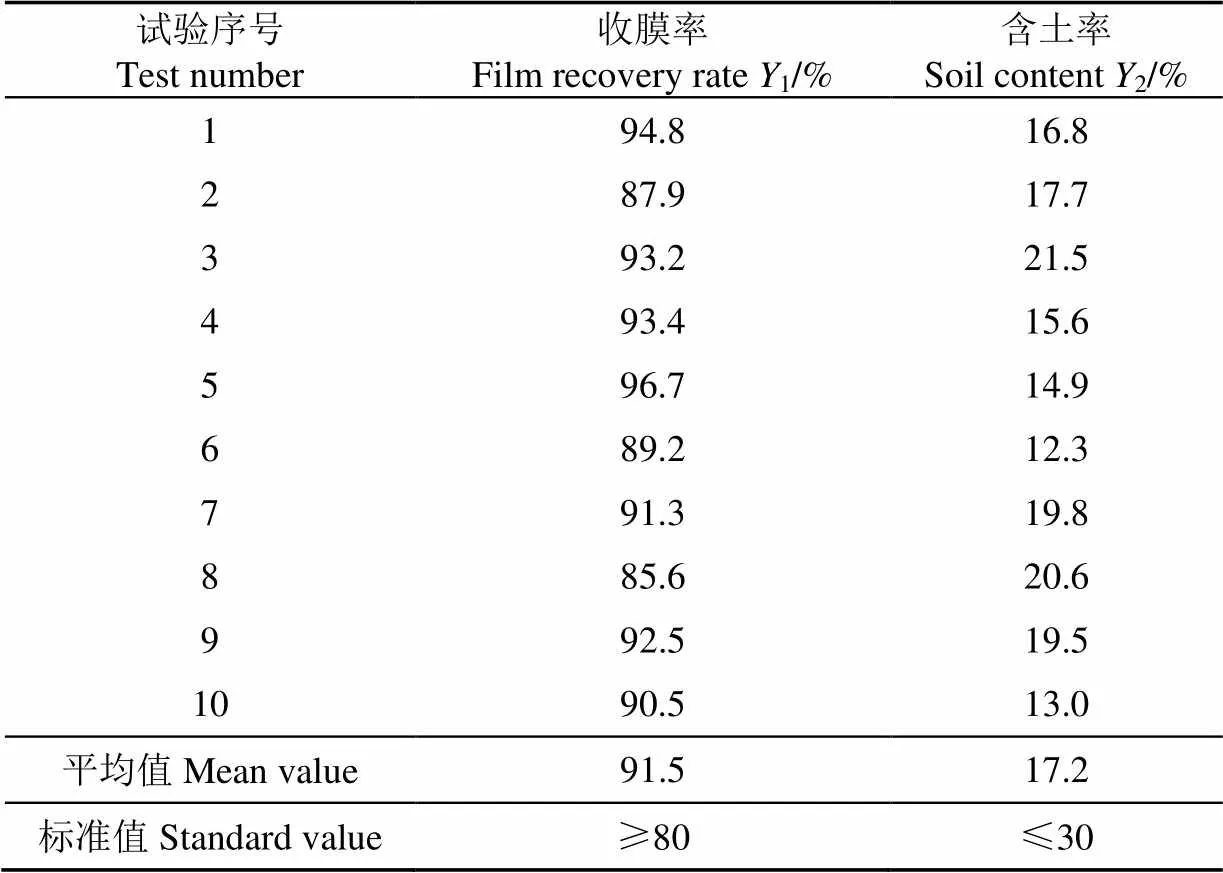
表2 田間試驗結果
試驗過程中發現,機具前行速度在1.0 m/s左右時,收膜與清土效果都比較理想,當機具前行速度加快時,殘膜回收質量依然良好,但集膜箱中土壤明顯增多,這是由于拖拉機的發動機轉速與后動力輸出軸轉速是聯動關系,當機具前行速度加快時,機具運動部件的轉速都將增加,清土時間相應縮短,而影響清土能力的主要參數(網鏈結構鏤空面積、碎土輥碎土壓力、雙作用激振裝置振幅、二級升運網鏈升運角)均不變,因此機具現有結構與運動參數已不能滿足較高工作速度下的清土要求。在今后的設計改進中,需進一步提升機具的清土效率。由于試驗設備和時間的限制,本次試驗只在現有結構及運動參數下進行了試驗,對于機具在不同工作參數下的收膜質量未能開展深入研究,因此在后續試驗中將綜合考慮一、二級升運網鏈運行速度對作業效果的影響,得出機具最優參數組合。
在對集膜框中殘膜進行檢測時,發現有少量雜草與殘膜混雜在一起,這是由于機具在收膜作業的同時將地里的雜草一并收集到集膜框中。若花生種植時使用白色地膜又沒有打除草劑,則地里容易長出較多雜草,機具在雜草較多的田塊中進行收膜作業將會收集大量雜草,使集膜框的利用率降低,影響作業效率,同時含雜率較高的殘膜也不利于殘膜回收后資源化利用。因此,開發相應的膜雜分離機構將是該機具今后優化提升的一個重點。另外,為提高機具經濟適用價值,實現一機多用,在后續改進中將機具的輸膜部件和集膜裝置設計為可更換結構,通過更換這些工作部件可實現機具回收花生、馬鈴薯等土下果實的功能。
4 結 論
1)針對鏈桿式輸膜結構在花生地殘膜回收作業時存在的漏膜、回膜、纏膜等問題,提出一種網鏈式輸膜結構,對鏈桿式輸膜結構與網鏈式輸膜結構的支撐度和通過性進行分析,說明網鏈式輸膜結構能夠有效提升殘膜支撐能力,避免輸膜過程中發生漏膜、回膜、纏膜等問題,同時保持較好的清土性能。
2)通過碎土輥對進入升運網鏈的土壤初步碾壓粉碎,碎土輥為浮動結構,可保持穩定的碎土壓力,且避免擁堵;采用激振頻率10 Hz,振幅25 mm的雙作用激振裝置,實現升運網鏈輸送時抖動清土;采用二級升運網鏈對未被一級升運網鏈清理干凈的黏性土塊與殘膜進行篩分,二級升運網鏈傾角35°~45°可調,可以滿足不同作業工況;集膜裝置為兩面敞開,四面封閉結構,通過液壓驅動實現快速卸膜,保障機具的作業效率。
3)對花生收獲后的殘留地膜進行回收試驗,在機具前行速度1.0 m/s、一級升運網鏈線速度2.0 m/s、二級升運網鏈線速度2.2 m/s、雙作用激振裝置頻率10 Hz時,收膜率達91.5%,未出現漏膜、回膜、纏膜等問題,含土率為17.2%,清土效果理想,能夠滿足花生地殘膜回收實際作業要求。
[1] 嚴昌榮,劉恩科,舒帆,等. 我國地膜覆蓋和殘留污染特點與防控技術[J]. 農業資源與環境學報,2014,31(2):95-102.
Yan Changrong, Liu Enke, Shu Fan, et al. Review of agricultural plastic mulching and its residual pollution and prevention measures in China[J]. Journal of Agricultural Resources and Environment, 2014, 31(2): 95-102. (in Chinese with English abstract)
[2] 嚴昌榮,何文清,劉恩科,等. 作物地膜覆蓋安全期概念和估算方法探討[J]. 農業工程學報,2015,31(9):1-4.
Yan Changrong, He Wenqing, Liu Enke, et al. Concept and estimation of crop safety period of plastic film mulching[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(9): 1-4. (in Chinese with English abstract)
[3] 何文清,嚴昌榮,趙彩霞,等. 我國地膜應用污染現狀及其防治途徑研究[J]. 農業環境科學學報,2009,28(3):533-538.
He Wenqing, Yan Changrong, Zhao Caixia, et al. Study on the pollution by plastic mulch film and its countermeasures in China[J]. Journal of Agro-Environment Science, 2009, 28(3): 533-538. (in Chinese with English abstract)
[4] 王志超,李仙岳,史海濱,等. 農膜殘留對土壤水動力參數及土壤結構的影響[J]. 農業機械學報,2015,46(5):101-106,140.
Wang Zhichao, Li Xianyue, Shi Haibin, et al. Effects of residual plastic film on soil hydrodynamic parameters and soil structure[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(5): 101-106, 140. (in Chinese with English abstract)
[5] 李元橋,何文清,嚴昌榮,等. 點源供水條件下殘膜對土壤水分運移的影響[J]. 農業工程學報,2015,31(6):145-149.
Li Yuanqiao, He Wenqing, Yan Changrong, et al. Effect of residual film on soil infiltration under drip irrigation[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(6): 145-149. (in Chinese with English abstract)
[6] 張丹,胡萬里,劉宏斌,等. 華北地區地膜殘留及典型覆膜作物殘膜系數[J]. 農業工程學報,2016,32(3):1-5. Zhang Dan, Hu Wanli, Liu Hongbin, et al. Characteristics of residual mulching film and residual coefficient of typical crops in North China[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(3): 1-5. (in Chinese with English abstract)
[7] 游兆延,顧峰瑋,吳峰,等. 壟作花生殘膜回收技術研究[J]. 農機化研究,2016(1):207-211.
You Zhaoyan, Gu Fengwei, Wu Feng, et al. Research on ridged peanut residue plastic film recycling technology[J]. Journal of Agricultural Mechanization Research, 2016(1): 207-211. (in Chinese with English abstract)
[8] 王吉奎,付威,王衛兵,等. SMS-1500 型秸稈粉碎與殘膜回收機的設計[J]. 農業工程學報,2011,27(7):168-172.
Wang Jikui, Fu Wei, Wang Weibing, et al. Design of SMS-1500 type straw chopping and plastic film residue collecting machine[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2011, 27(7): 168-172. (in Chinese with English abstract)
[9] 楊麗,張東興,侯書林,等. 玉米苗期地膜回收機結構參數分析與試驗[J]. 農業機械學報,2010,41(12):29-34.
Yang Li, Zhang Dongxing, Hou Shulin, et al. Analysis of structural parameters and experiment of plastic film collector for corn fields during seedling period[J]. Transactions of the Chinese Society for Agricultural Machinery, 2010, 41(12): 29-34. (in Chinese with English abstract)
[10] 呂釗欽,張磊,張廣玲,等. 鏈條導軌式地膜回收機的設計與試驗[J]. 農業工程學報,2015,31(18):48-54.
Lü Zhaoqin, Zhang Lei, Zhang Guangling, et al. Design and test of chain guide rail-type plastic film collector[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(18): 48-54. (in Chinese with English abstract)
[11] 王學農,史建新,郭俊先,等. 懸掛式棉稈粉碎還田摟膜機摟膜機構的設計與試驗研究[J]. 農業工程學報,2008,24(1):135-140.
Wang Xuenong, Shi Jianxin, Guo Junxian, et al. Experimental study and design on film raking mechanism of hanging film raker with cotton-stalk crushing and returning to field[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2008, 24(1): 135-140. (in Chinese with English abstract)
[12] 戴飛,趙武云,孫偉,等. 馬鈴薯收獲與氣力輔助殘膜回收聯合作業機設計與試驗[J]. 農業機械學報,2017,48(1):64-72.
Dai Fei, Zhao Wuyun, Sun Wei, et al. Design and experiment of combined operation machine for potato harvesting and plastic film pneumatic auxiliary collecting[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(1): 64-72. (in Chinese with English abstract)
[13] 施麗莉,胡志超,顧峰瑋,等. 耙齒式壟作花生殘膜回收機設計及參數優化[J]. 農業工程學報,2017,33(2):8-15. Shi Lili, Hu Zhichao, Gu Fengwei, et al. Design and parameter optimization on teeth residue plastic film collector of ridged peanut[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(2): 8-15. (in Chinese with English abstract)
[14] 嚴偉,胡志超,吳努,等. 鏟篩式殘膜回收機輸膜機構參數優化與試驗[J]. 農業工程學報,2017,33(1):17-24.
Yan Wei, Hu Zhichao, Wu Nu, et al. Parameter optimization and experiment for plastic film transport mechanism of shovel screen type plastic film residue collector[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(1): 17-24. (in Chinese with English abstract)
[15] 徐弘博,胡志超,吳峰,等. 鏈齒式殘膜回收輸送方式對比分析與試驗[J]. 農機化研究,2017(5):12-20.
Xu Hongbo, Hu Zhichao, Wu Feng, et al. Contrastive analysis and experiment of conveying mode for chain-tooth plastic film residue collector[J]. Journal of Agricultural Mechanization Research, 2017(5): 12-20. (in Chinese with English abstract)
[16] 游兆延,胡志超,吳惠昌,等. 1MGDS-100A型鏟篩式殘膜回收機的設計與試驗[J]. 農業工程學報,2017,33(9):10-18.
You Zhaoyan, Hu Zhichao, Wu Huichang, et al. Design and experiment of 1MCDS-100A typed shovel-sieve residual film recovery machine[J], Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(9): 10-18. (in Chinese with English abstract)
[17] 徐弘博,胡志超,吳峰,等. 殘膜回收收膜部件研析[J]. 農機化研究,2016(8):242-249.
Xu Hongbo, Hu Zhichao, Wu Feng, et al. Study on the collecting component of plastic film residue collector[J]. Journal of Agricultural Mechanization Research, 2016(8): 242-249. (in Chinese with English abstract)
[18] 張立新,陳一丁. 1MC型地膜回收起茬機推廣使用分析[J].農機科技推廣,2006(8):38.
[19] 程興田,趙建托,潘衛云,等. 兩級升運鏈卷軸式殘膜撿拾機的設計與試驗[J]. 中國農機化學報,2016(4):31-34.
Cheng Xingtian, Zhao Jiantuo, Pan Weiyun, et al. Design and experiments of two elevator chain reel plastic film collector[J]. Journal of Chinese agricultural mechanization, 2016(4): 31-34. (in Chinese with English abstract)
[20] 戴飛,趙武云,張鋒偉,等. 玉米全膜雙壟溝殘膜回收機作業性能優化與試驗[J]. 農業工程學報,2016,32(18):50-60.
Dai Fei, Zhao Wuyun, Zhang Fengwei, et al. Optimization and experiment of operating performance of collector for corn whole plastic film mulching on double ridges[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(18): 50-60. (in Chinese with English abstract)
[21] 張佳喜,王學農,張麗,等. 農田地膜拉伸性能變化對纏繞式回收的影響[J]. 農業工程學報,2015,31(20):41-47.
Zhang Jiaxi, Wang Xuenong, Zhang Li, et al. Effects of mechanical tensile properties of plastic film on plastic recycling method[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(20): 41-47. (in Chinese with English abstract)
[22] 中華人民共和國農業部. 殘地膜回收機作業質量:NY/T 1227-2006[S]. 北京:中國標準出版社,2016:12.
[23] 張克平,吳勁鋒,黃曉鵬,等. 對輥粉碎機理研究進展[J]. 中國農機化學報,2013(1):73-77.
Zhang Keping, Wu Jinfeng, Huang Xiaopeng, et al. Research progress on mechanism of double roller comminution[J]. Journal Chinese Agricultural Mechanization, 2013, 34(1): 73-77. (in Chinese with English abstract)
[24] 甘建國. 高壓對輥粉碎的微分剪切理論及數學模型[J]. 機械工程學報,2008(3):241-248.
Gan Jianguo. Differential shear theory and mathematical model of high pressure double roll crush[J]. Chinese journal of mechanical engineering, 2008(3): 241-248. (in Chinese with English abstract)
[25] 李小昱,雷廷武,王為. 土壤抗壓強度的試驗研究[J]. 農業工程學報,2001,17(5):19-21.
Li Xiaoyu, Lei Tingwu, Wang Wei. Experiment research on unconfined compression strength of soil[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2001, 17(5): 19-21. (in Chinese with English abstract)
[26] 趙武云,史增錄,戴飛,等. ADAMS2013基礎與應用實例教程[M]. 北京:清華大學出版社,2015.
[27] 余友泰,蔣建鵬. 土壤、作物種實和各種脫出物對鋼板、鑄鐵、和木板等的摩擦系數的測定[J]. 東北農學院學報,1957(1):117-127.
[28] 劉曉明,葉瑋. 液壓缸結構設計及運行特性分析[J]. 液壓氣動與密封,2013(7):17-21.
Liu Xiaoming, Ye Wei. Structure design and analysis on operating property of hydraulic cylinder[J]. Hydraulics pneumatics & Seals, 2013(7): 17-21. (in Chinese with English abstract)
[29] 段文獻,王吉奎,李陽,等. 夾指鏈式殘膜回收裝置的設計及試驗[J]. 農業工程學報,2016,32(19):35-42.
Duan Wenxian, Wang Jikui, Li Yang, et al. Design and test of clamping finger-chain type device for recycling agricultural plastic film[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(19): 35-42. (in Chinese with English abstract)
[30] 李斌,王吉奎,胡凱,等. 殘膜回收機順向脫膜機理分析與試驗[J]. 農業工程學報,2012,28(21):23-28.
Li Bin, Wang Jikui, Hu Kai, et al. Analysis and test of forward film removing mechanism for polythene film collector[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(21): 23-28. (in Chinese with English abstract)
Design and experiment of network chain type residual plastic film collector for peanut field
Xu Hongbo, Hu Zhichao※, Wu Feng, Gu Fengwei, Wei Hai, Yan Jianchun
(,,210014,)
Film-mulching cultivation technique is widely used in China due to its advantage of tremendously increasing the yield of crops. In recent years, the application area of film-mulching cultivation technique has expanded to about 25 million hm2. However, the soil and environment pollution associated with its extensive application becomes an issue which needs to be appropriately considered. As a type of typical film-mulching planting crops in China, peanuts attain the average plastic film residual quantity in the main producing areas to 32.0kg/hm2. In general, the residual quantity increases yearly as the plastic file is difficult to dissolve, resulting in the excess of the farmland film residue limit standard for peanut if no effective treatment being involved. Chain-rod type plastic film residue collector has the feature of high productivity, excellent soil removing ability and can collect the underground plastic film, but when it is used to collect residual plastic film for peanut field, there are plastic film leakage, back and twine problems in the process of conveying. Thus, a network chain type residual plastic film collector for peanut field was designed, which had better work performance in collecting peanut plastic film. According to the design of the critical components of the collector, the structural styles, assembly modes and operation parameters of key working parts, including digging shovel, network chain, soil broken roller, double-acting excitation device and collecting film device, were ascertained respectively. The mathematical models of residual film supporting degree and soil passing ability of chain-rod structure and network chain structure were founded and analyzed respectively. The analysis showed that the network chain structure had a better residual film supporting degree but slightly worse soil passing ability when compared to the chain-rod structure, indicating the conveying advantage of network chain structure. Based on the theoretical working pressure calculation, a soil broken roller with the weight of 350 N was demonstrated to smash the clod effectively. The ADAMS software was used to simulate the motion trail of double-acting excitation device, which showed that the amplitude of the excitation device was 25 mm. In order to sort out sticky clod, the structure of second stage network chain was designed on the basis of elevation angle calculation, which found out that the elevation angle should greater than 35?. The hydraulic driven box of collecting film was designed and checked, and the results showed that the distance of hydraulic cylinder mounting holes was 630 mm and the inner diameter of hydraulic cylinder was 30 mm. Furthermore, the working quality of network chain type residual plastic film collector for peanut field was conducted by field experiments. The field experiments showed that when the operation speed of the collector was 1.0 m/s, the digging depth was 100 mm, the linear speed of first stage network chain was 2.0 m/s, the linear speed of second stage network chain was 2.2 m/s and the frequency of double-acting excitation device was 10 Hz, the mean plastic film collecting rate was 91.5% and the clod content was 17.2%, which met the requirements of residual plastic film collecting for peanut field. The network chain could convey the residual plastic film smoothly without any film leakage, back and twine problems during the entire process. Also, the clod cleanup structure performed well and the hydraulic driven box of collecting film was able to discharge the film conveniently and efficiently. Therefore, the methods and achievements in this study provide important references for the design and optimization of relevant residual plastic film collectors.
plastic films; design; experiments; residual plastic film collector; network chain; analysis
10.11975/j.issn.1002-6819.2017.17.001
S223.5
A
1002-6819(2017)-17-0001-09
2017-04-17
2017-08-03
公益性行業(農業)科研專項“殘膜污染農田綜合治理技術方案”(201503105_08);中國農業科學院創新工程土下果實收獲機械。
徐弘博,江蘇南京人,助理研究員,主要從事農機化裝備研發。南京 農業部南京農業機械化研究所,210014。 Email:xhbnjs@163.com
胡志超,陜西藍田人,研究員,博士,博士生導師,主要從事農業機械化工程及農產品加工技術裝備研究。南京 農業部南京農業機械化研究所,210014。Email:nfzhongzi@163.com
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08