利用海浪噪聲自相關(guān)實現(xiàn)散射體無源探測?
2017-10-23 07:16:52遲靜李小雷高大治王好忠王寧
物理學(xué)報 2017年19期
遲靜 李小雷 高大治 王好忠 王寧
(中國海洋大學(xué)海洋技術(shù)系,青島 266100)
利用海浪噪聲自相關(guān)實現(xiàn)散射體無源探測?
遲靜 李小雷 高大治?王好忠 王寧
(中國海洋大學(xué)海洋技術(shù)系,青島 266100)
提出了一種利用海浪噪聲自相關(guān)實現(xiàn)散射體無源探測的新方法.將各接收器記錄噪聲信號的自相關(guān)減去所有接收器記錄噪聲信號自相關(guān)的平均值,得到散射信號的到達結(jié)構(gòu),然后結(jié)合基爾霍夫移位算法實現(xiàn)對散射體的探測.與利用背景噪聲互相關(guān)提取格林函數(shù)從而實現(xiàn)散射體探測的方法不同,自相關(guān)無需考慮各個接收器之間的大量數(shù)據(jù)傳輸及時間同步問題,這為相距較遠的多接收器和移動平臺目標(biāo)探測提供了極大的方便.將所提出的方法應(yīng)用于實驗數(shù)據(jù)中,最終探測結(jié)果與實際測量結(jié)果相比差別不大,驗證了方法的有效性.
噪聲自相關(guān),散射體被動探測,安靜目標(biāo)
1 引 言
利用環(huán)境噪聲進行被動探測具有隱蔽性高,能耗低等優(yōu)點,最近幾十年越來越成為人們關(guān)注的焦點.20世紀(jì)90年代,Buckingham等[1]開始在海洋聲學(xué)領(lǐng)域研究利用海洋環(huán)境噪聲探測目標(biāo)的可能性,提出聲日光成像(acoustic daylight imaging)的概念,并在實驗中利用自制的聲日光海洋噪聲成像系統(tǒng)(acoustics daylight ocean noise imaging system,ADONIS)在8.5—75 kHz的頻段成功地實現(xiàn)了不同形狀散射體成像[2].2001年,Weaver和Lobiks[3]的超聲實驗證明:通過對兩個傳聲器上記錄的環(huán)境噪聲進行互相關(guān)處理,可獲得兩點間的格林函數(shù),等效于一個傳聲器作為虛擬聲源發(fā)射信號,另外一個傳聲器接收.此后,這一方法在超聲學(xué)[4?6]、地震學(xué)[7,8]、海洋聲學(xué)等[9,10]領(lǐng)域迅速推廣.
2008年,Snieder等[11]利用穩(wěn)相估計的理論推導(dǎo)了當(dāng)有散射體存在時兩點間環(huán)境噪聲的互相關(guān)結(jié)果,并指出該結(jié)果中可以獲取散射體位置信息.2009年,Garnier和Papanicolaou[12]通過仿真驗證了噪聲互相關(guān)可以實現(xiàn)目標(biāo)探測.2013年,Davy等[13]在消聲混響腔實驗中成功地利用寬帶微波段熱輻射的互相關(guān)結(jié)果實現(xiàn)了對厘米尺度棒狀散射體的探測.2014—2015年間,中國海洋大學(xué)利用較為常見的公路噪聲以及海浪噪聲的互相關(guān)實現(xiàn)了對不同散射體探測[14,15].
利用環(huán)境噪聲互相關(guān)結(jié)果對散射體探測非常依賴信號采集時各個通道的同步性,如果存在同步誤差會使互相關(guān)結(jié)果出現(xiàn)時間漂移.當(dāng)各接收器相距較遠時,數(shù)據(jù)的實時傳輸及嚴(yán)格同步實現(xiàn)困難大,增加了遠距離多接收器長時間探測的難度.為解決這一問題,本文提出了運用環(huán)境噪聲自相關(guān)對散射體探測的新方法.由于采用自相關(guān)處理,各通道數(shù)據(jù)傳輸不必嚴(yán)格同步.另一方面,這種方法只需傳輸各個接收器一段時間內(nèi)記錄噪聲信號的自相關(guān)結(jié)果,而非接收器采集的實時數(shù)據(jù),這大大減少了實驗過程中需要傳輸以及存儲的數(shù)據(jù)量.因此該方法有望在遠距離多接收器探測研究中取得突破.本文首先通過理論推導(dǎo)證明了利用環(huán)境噪聲自相關(guān)提取散射體位置信息的可行性.然后將自相關(guān)的處理方法應(yīng)用于石老人海水浴場進行的海浪噪聲探測目標(biāo)實驗中,成功實現(xiàn)了對聚氯乙烯(PVC)圓筒的無源探測.
2 存在散射體時環(huán)境噪聲自相關(guān)的理論推導(dǎo)
考慮開放空間中存在一閉合表面S,如圖1(a)所示,假設(shè)散射體位于坐標(biāo)原點,散射系數(shù)為fk(n,n′),n與n′分別表示入射及散射波方向.假設(shè)強度為q(ω)的噪聲源均勻分布在半徑為r的球面上,散射體位于球心,接收器位于rA處.散射體、接收器與噪聲源位于同一平面,建立如圖1(a)所示的坐標(biāo)系,rA與r分別表示為:

則由r處點源激發(fā),rA處的接收聲場可表示為
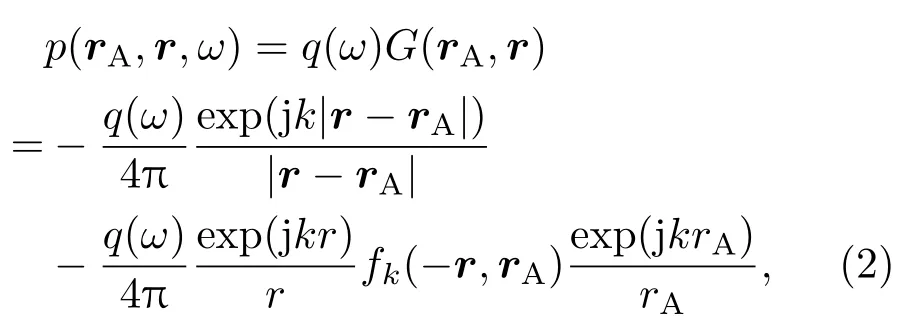
(2)式中k=ω/c,ω表示噪聲源角頻率,c表示介質(zhì)中聲速,G(rA,r)表示噪聲源rA與接收器r之間的格林函數(shù).所以rA處接收聲場的自相關(guān)結(jié)果為
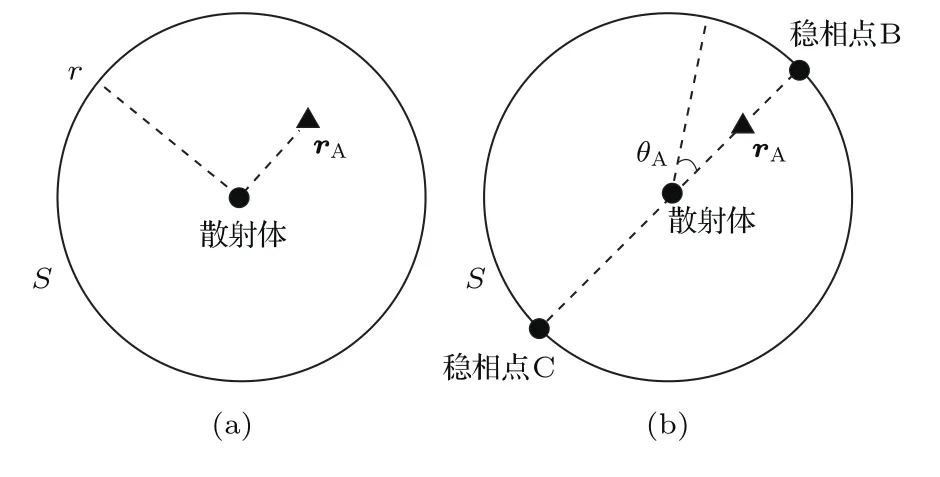
圖1 (a)空間中存在散射體時示意圖;(b)穩(wěn)相點示意圖Fig.1.(a)Schematic diagram of the scatterer and receiver;(b)schematic diagram of stationary-phase point.
其中,p?表示p的共軛,〈〉表示統(tǒng)計平均(在實際中這種平均通常被幾段互不重合的時間窗平均代替[16]).假設(shè)不同位置的噪聲源互不相關(guān),即

其中,Q2表示噪聲源功率譜密度函數(shù).同時假設(shè)噪聲源與散射體之間的距離遠大于接收器與散射體之間的距離,即r?rA,此時|r?rA|≈r.令dS=r2d?,其中?表示聲源所在球面的立體角,可以得到

(5)式等號右邊包含三項,對T2項及T3項采用穩(wěn)相近似[17]方法,穩(wěn)相點為圖1(b)中的B,C兩點(可以發(fā)現(xiàn)T2項的兩個穩(wěn)相點與T3項兩個的穩(wěn)相點均位于散射體與接收器連線的兩端),求得(5)式穩(wěn)相近似的最終結(jié)果為:

將(6)式代入(5)式中,化簡得到:

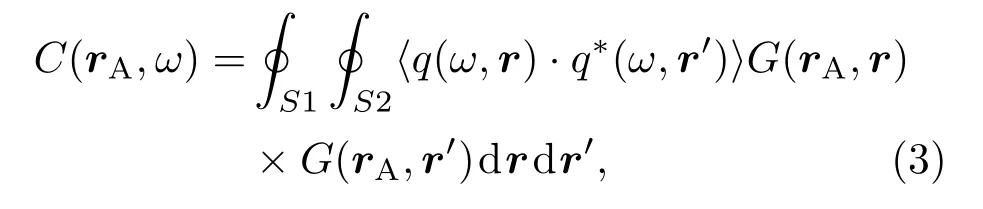
(7)式為空間中存在散射體時噪聲自相關(guān)結(jié)果.(7)式等號右邊第一項為(2)式中直達波的自相關(guān),在時域上對應(yīng)零時刻的相關(guān)峰;第二項根據(jù)廣義光學(xué)定理[18]可知中括號里的部分等于零;第三項為因果以及非因果的散射項,相位中的2rA表示時域上距離零時刻2rA/c處出現(xiàn)相關(guān)峰.(7)式表明,雖然隨機環(huán)境噪聲源產(chǎn)生的聲場通常被認(rèn)為是非相干的,來自穩(wěn)相點處噪聲源的貢獻可以看作是單一方向噪聲源的貢獻.因此對于同一接收器來自穩(wěn)相點方向噪聲源的直達波和散射波具有相干性.通過自相關(guān)運算,那些穩(wěn)相點附近噪聲源的貢獻不斷累加,其他噪聲源的貢獻因為振蕩而相互抵消,從而在散射時刻處出現(xiàn)相關(guān)峰,這就為用自相關(guān)結(jié)果實現(xiàn)散射體探測提供了可能.但是也可以看到,自相關(guān)結(jié)果的第一項是所有噪聲源積分的結(jié)果,而第三項主要是穩(wěn)相點處噪聲源的貢獻.因此時域自相關(guān)結(jié)果零時刻的峰值遠大于散射時刻的峰值,以至于散射時刻的峰值通常淹沒在零時刻峰值的旁瓣中.因此在進行探測之前,有必要利用自相關(guān)背景抵消法對自相關(guān)結(jié)果進行預(yù)處理.假設(shè)有來自N個坐標(biāo)為rAi(i=1,2,···,N)的接收器分別記錄噪聲信號,分別對其進行自相關(guān)運算得到自相關(guān)函數(shù)C(rAi,ω),令:

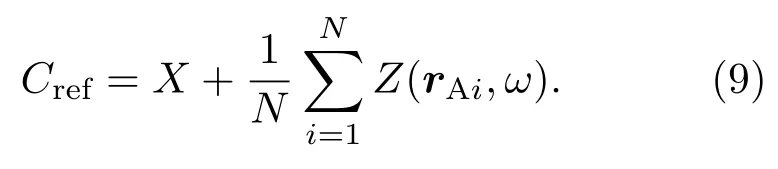
函數(shù)X與Z分別對應(yīng)(6)式中的第T1和T3項(由于噪聲源均勻分布,因此第二項為零),其中X對應(yīng)時域上零時刻處的相關(guān)峰,當(dāng)聲源均勻分布時,X為與接收器坐標(biāo)無關(guān)的常數(shù).Z項對應(yīng)因果與非因果的散射相關(guān)峰(見圖2(a),可以看出不經(jīng)過處理時X與Z的幅值相差很大,Z幾乎分辨不出).取C(rAi,ω)的平均值作為參考結(jié)果,得到
然后用每個接收器的自相關(guān)結(jié)果減去得到

對于Z項而言,由于其散射時刻與接收器的位置有關(guān),但當(dāng)N足夠大且各接收器與散射體之間的距離不同時,可以認(rèn)為

因此,(10)式可以化簡為

從(12)式的結(jié)果可以看出,經(jīng)過自相關(guān)背景抵消后,自相關(guān)結(jié)果中零時刻的相關(guān)峰被抵消,只剩下時域上對應(yīng)著因果與非因果的散射時刻(t=2rA/c)的峰值的Z部分(見圖2(b)),因此這種方法可以明顯提高散射峰處的信干比.
3 利用海洋噪聲自相關(guān)探測實驗
2016年4月22日,中國海洋大學(xué)海洋聲學(xué)實驗室在青島石老人海水浴場進行了利用海浪噪聲對安靜散射體的探測實驗,實驗中接收器與散射體的相對位置如圖3所示(實驗時散射體距離海岸線約100 m,表明聲源距離散射體超過100 m,各接收器距離散射體的平均距離約為10 m,其中距離最近的為14號7.32 m,最遠為2號13 m,滿足r?rA,符合理論推導(dǎo)中的遠場假設(shè)).實驗當(dāng)天的噪聲記錄時間為14:00—14:50,處于當(dāng)日的第二次漲潮階段,海浪噪聲能量較大(在接收器位置大約為70 dB).除此之外,石老人海水浴場有著長達3 km的海岸線,沙灘寬闊平坦,海浪噪聲不同日期之間的重復(fù)性高以及隨潮汐進退變化緩慢而持續(xù)性好等特點,成為進行噪聲探測實驗的優(yōu)良場地.
本次實驗使用的儀器設(shè)備包括:14個無指向性傳聲器(型號:MNP20,生產(chǎn)廠家:SKC,其中1號與14號單獨放置,2—7號以及8—13號為兩組接收器陣,陣間距為24 cm),16通道放大器(SKC)、信號記錄儀(PXI 1042Q,美國NI公司)、聲級計(AWA6270+,杭州愛華).
圖4展示了此次實驗中1號接收器接收的12 min海浪噪聲信號的時頻圖和功率譜.從圖4(a)中可以看出,實驗中接收的海浪噪聲的頻譜在時間上比較平穩(wěn),沒有劇烈的變化.能量隨頻率的升高而單調(diào)下降,主要能量集中在3000 Hz以下的頻段.從圖4(b)中可以看出,300 Hz以下頻段變化較為劇烈,而300—2500 Hz頻段變化比較平緩.因此,數(shù)據(jù)處理中使用300—2500 Hz頻段的噪聲信號進行自相關(guān)探測.
圖(5)以1號接收器為例展示了預(yù)處理前后的自相關(guān)結(jié)果(自相關(guān)的時間窗為1 s,累積時間長度為12 min,進行自相關(guān)背景抵消處理時,取N=14).從圖5(a)中可以看出,自相關(guān)結(jié)果零時刻的相關(guān)峰在幅值上遠遠高于其他位置,使得散射時刻的相關(guān)峰淹沒在零時刻的旁瓣中,這與(7)式的描述以及仿真結(jié)果相一致.圖5(b)為進行自相關(guān)背景抵消后的包絡(luò)(考慮到各個接收器靈敏度可能存在差異,因此自相關(guān)結(jié)果全部按照零時刻的峰值進行了歸一化).對比圖5(a)與圖5(b)可以發(fā)現(xiàn),在48 ms附近的散射信號經(jīng)過預(yù)處理以后信干比有了明顯的提升(這里由于海浪噪聲是單邊聲源,不滿足廣義光學(xué)定理的條件,因此零時刻處的相關(guān)峰不能被完全抵消).對經(jīng)過預(yù)處理的自相關(guān)結(jié)果采用基爾霍夫移位算法[19]進行探測.算法步驟如下.
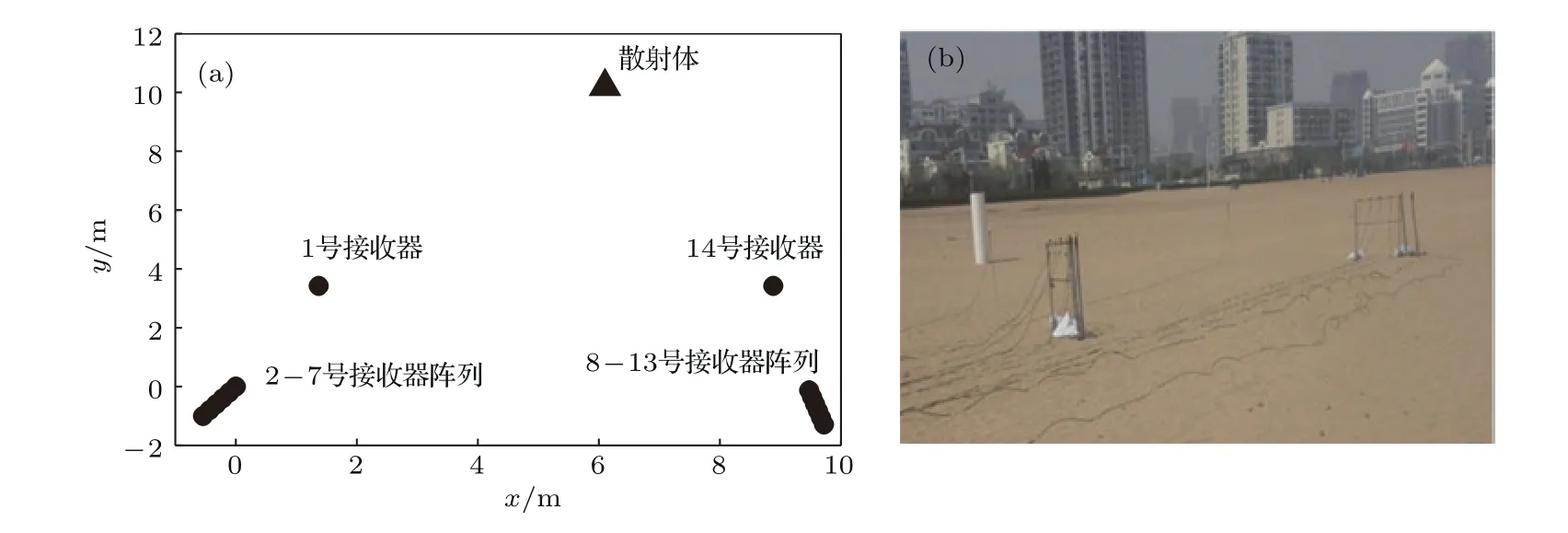
圖3 (a)平面坐標(biāo)示意圖,黑三角處為散射體(高1.2 m直徑0.2 m的PVC圓筒),1—14為接收器,所有的接收器都被置于1 m高的位置并且包裹防風(fēng)罩;(b)實驗現(xiàn)場Fig.3.(a)Schematic diagram of layout of experiment,the black triangle is scatterer(a PVC cylinder with 1.2 m height and 20 cm radius),No.1–14 are receivers,all the receivers are at 1 m height and wrapped by a sponge;(b)layout of the experiment.
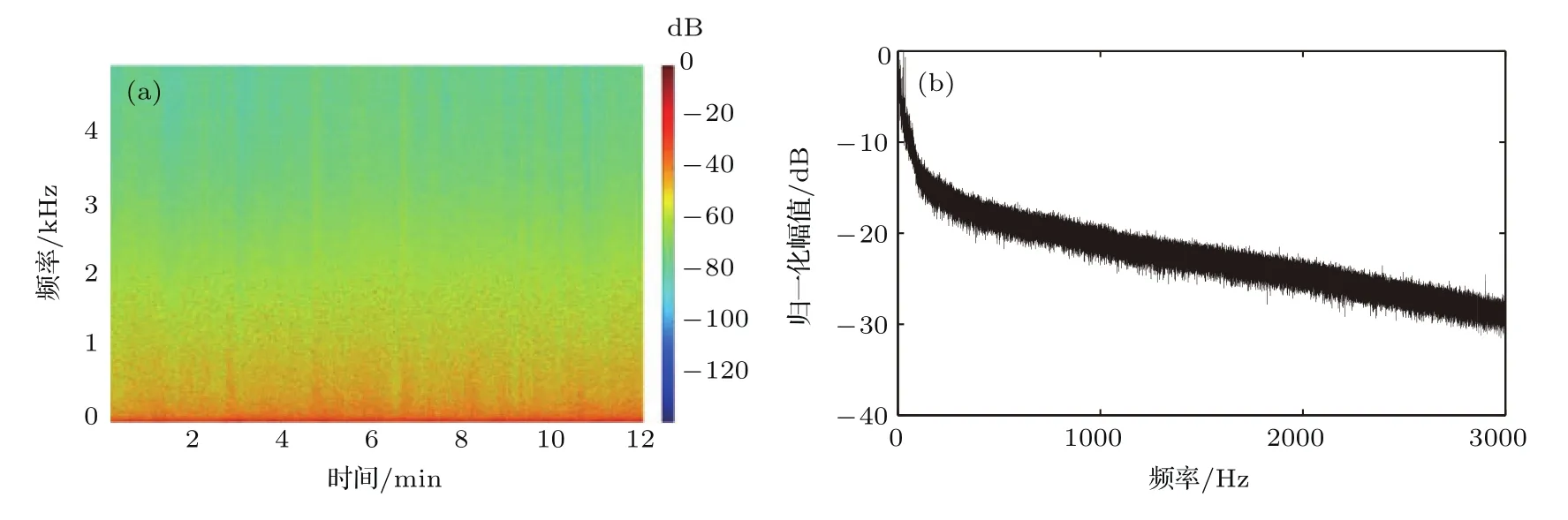
圖4 (網(wǎng)刊彩色)(a)1號接收器實驗中12 min的時頻圖;(b)1號接收器接收噪聲信號12 min的功率譜Fig.4.(color online)(a)The spectrogram of the 12-minutes surf noise recorded by No.1 receiver;(b)the power spectrum of the 12-minutes surf noise recorded by No.1 receiver.
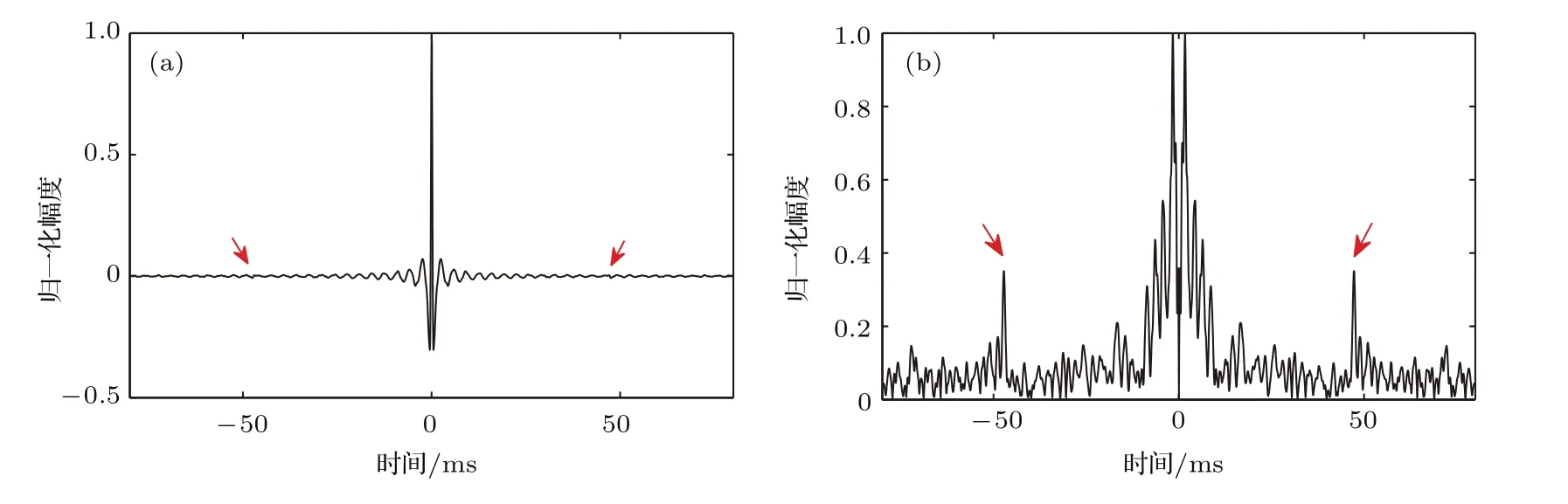
圖5 1號接收器接收噪聲信號預(yù)處理前后自相關(guān)結(jié)果,經(jīng)測量,1號接收器距離散射體中心位置8.26 m,計算得散射路徑應(yīng)出現(xiàn)在±48 ms處,在圖中用紅色箭頭標(biāo)出 (a)1號接收器12 min自相關(guān)結(jié)果;(b)1號接收器12 min自相關(guān)函數(shù)減去參考自相關(guān)函數(shù)后的包絡(luò)Fig.5.Autocorrelation result of the noise recorded by No.1 receiver before and after preprocessing,in the experiment,the No.1 receiver is 8.26 m away from the center of the scatterer,as the red arrow shows in the fi gure,we calculate that the scatter wave may arrive at±48 ms:(a)The autocorrelation result of the noise recorded by No.1 receiver before preprocessing;(b)the envelope of autocorrelation result of the noise recorded by No.1 receiver after preprocessing.
第一步,將包含目標(biāo)在內(nèi)的掃描區(qū)域分成等間隔的搜索點;
第二步,計算每個搜索點rs與每個接收器rAi之間距離的2倍,然后除以聲速作為時間偏移量(?ts,i=2|rs?rAi|/c0);
第三步,計算所有搜索點處的處的基爾霍夫移位(KM)泛函,

第四步,取零時刻處附近一個小鄰域中(?t′,t′)的能量積分作為每個搜索點的代價函數(shù),
圖6分別展示了無同步誤差時互相關(guān)以及自相關(guān)的KM移位以后的結(jié)果(搜索區(qū)域為圖3(a)所示的坐標(biāo)系中,x方向0—10 m,y方向7—13 m的矩形范圍,掃描精度為0.1 m.圖中標(biāo)有“*”號的位置代表散射體圓心的實際位置),可以發(fā)現(xiàn)經(jīng)過預(yù)處理后,在不考慮各通道之間的同步性的情況下,自相關(guān)可以實現(xiàn)與互相關(guān)的幾乎相同探測結(jié)果.
圖7展示了各個接收器之間不同步時,兩種處理方式KM移位結(jié)果的對比.不難看出,隨著各個接收器之間的同步誤差的增加,互相關(guān)的結(jié)果逐漸變差,最后幾乎無法正確定位散射體.而自相關(guān)的結(jié)果卻幾乎不受各接收器同步問題的影響,這充分體現(xiàn)了自相關(guān)方法的優(yōu)越性.
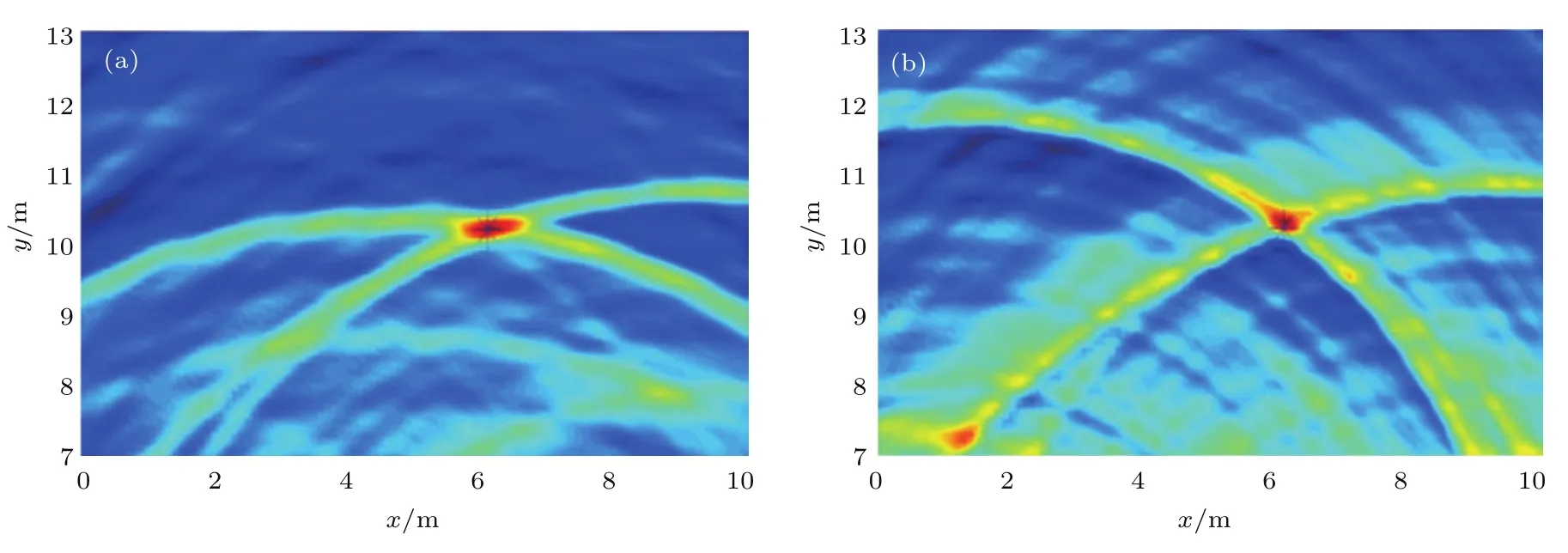
圖6 (網(wǎng)刊彩色)無同步誤差時相同接收器相同時間段內(nèi)自相關(guān)與互相關(guān)KM移位成像方法的結(jié)果,圖中*號表示目標(biāo)的實際位置 (a)互相關(guān)結(jié)果;(b)自相關(guān)結(jié)果Fig.6.(color online)The result of Kirchho ffmigrant using cross-correlation and autocorrelation without synchronization error,the ‘*’in the fi gure shows the actual postion of the target:(a)Cross-correlation;(b)autocorrelation.
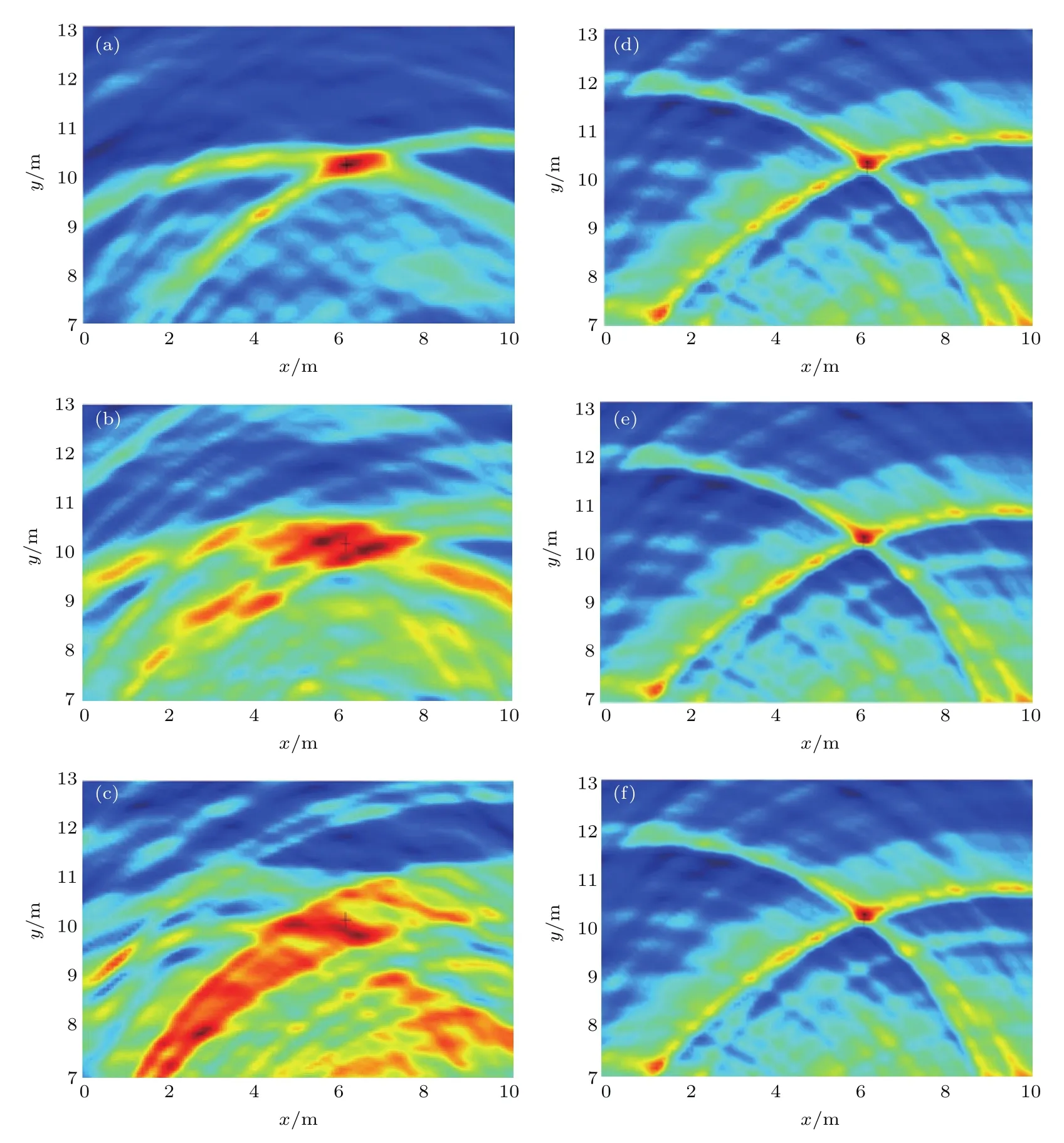
圖7 (網(wǎng)刊彩色)接收器存在同步誤差時對兩種探測結(jié)果的影響 (a),(d)分別為存在1 ms同步誤差時互相關(guān)與自相關(guān)的探測結(jié)果;(b),(e)分別表示存在2 ms同步誤差時互相關(guān)與自相關(guān)的探測結(jié)果;(c),(f)分別表示存在5 ms同步誤差時互相關(guān)與自相關(guān)的探測結(jié)果Fig.7.(color online)The e ff ect on two detecting methods when there is synchronization error:(a)and(d)Shows the result of Kirchho ffmigrant using cross-correlation and autocorrelation respectively when the synchronization error is 1 ms;(b)and(e)shows the result when the synchronization error is 2 ms;(c)and(f)shows the result when the synchronization error is 5 ms.
4 結(jié) 論
本文通過推導(dǎo)散射體存在時環(huán)境噪聲的自相關(guān)結(jié)果,證明了利用環(huán)境噪聲的自相關(guān)對散射體進行探測的可行性.當(dāng)噪聲場均勻分布時且時間上平穩(wěn)時,噪聲場的自相關(guān)結(jié)果中就會包含散射體位置的信息.同時,根據(jù)自相關(guān)結(jié)果的特點利用自相關(guān)背景抵消方法進行預(yù)處理,從而顯著提高了目標(biāo)位置處的信干比.在實驗中利用12 min的海浪噪聲自相關(guān)結(jié)果實現(xiàn)了對距離10 m遠處的PVC圓筒的探測.同時通過與存在同步誤差時互相關(guān)方法的探測結(jié)果對比,證明了自相關(guān)探測方法的穩(wěn)定性.在今后的工作中將會詳細討論散射信號的信噪比與探測結(jié)果的關(guān)系以及針對自相關(guān)的頻域預(yù)處理方法,從而進一步提高探測結(jié)果的分辨率,為最終實現(xiàn)水下安靜目標(biāo)的被動探測奠定基礎(chǔ).
[1]Buckingham M J,Broderick V,Glegg S A L 1992Nature356 327
[2]Epifanio C L,Potter J R,Deane G B,Readhead M L,Buckingham M J 1999J.Acoust.Soc.Am.106 3211
[3]Weaver R L,Lobkis O I 2001J.Acoust.Soc.Am.110 3011
[4]Larose E,Derode A,Campillo M,Fink M 2004J.Appl.Phys.95 8393
[5]Larose E,Montaldo G,Derode A,Campillo M 2006Appl.Phys.Lett.88 104103
[6]Lani S,Satir S,Gurun G,Sabra K G,Degertekin F L 2011Appl.Phys.Lett.99 224103
[7]Sabra K G,Gerstoft P,Roux P,Kuperman W A,Fehler M C 2005Geophys.Res.Lett.32 000
[8]Curtis A,Gerstoft P,Sato H,Snieder R,Wapenaar K 2006The Leading Edge25 1082
[9]Roux P,Kuperman W A,the NPAL group 2004J.Acoust.Soc.Am.116 1995
[10]Brooks L A,Gerstoft P 2009J.Acoust.Soc.Am.125 723
[11]Snieder R,van Wijk K,Haney M 2008Phys.Rev.E78 036606
[12]Garnier J,Papanicolaou G 2009J.Imaging Sci.2 396
[13]Davy M,Fink M,de Rosny J 2013Phys.Rev.Lett.110 20
[14]Li G F,Li J,Gao D Z,Wang N 2016Acta Acustica41 49(in Chinese)[李國富,黎潔,高大治,王寧 2016聲學(xué)學(xué)報41 49]
[15]Li J,Gerstoft P,Gao D Z,Li G F,Wang N 2017J.Acoust.Soc.Am.141 64
[16]Larose E,Margerin L,Derode A,van Tiggelen B,van Campillo M,Shapiro N M,Paul A,Stehly L,Tanter M 2006Geophysics71 SI11
[17]Bender C M,Orszag S A 1999Advanced Mathematical Methods for Scientists and Engineers(New York:Springer-Verlag)pp276–280
[18]Glauber R,Schomaker V 1953Phys.Rev.89 667
[19]Sabra K G,Winkel E S,Bourgoyne D A 2007J.Acoust.Soc.Am.121 4
Passive detection of scatterer using autocorrelation of surf noise?
Chi Jing Li Xiao-LeiGao Da-Zhi?Wang Hao-Zhong Wang Ning
(Department of Marine Technology,Ocean University of China,Qingdao 266100,China)
When a scatterer is located in a di ff use noise fi eld,time domain Green’s function between two di ff erent receivers can be extracted from cross-correlation of ambient noise which is recorded by the two receivers so that target detection can be implemented.However,the method based on cross-correlation strongly depends on timing synchronization of each receiver,otherwise there will be a time drift in the cross-correlation result,which can bring error in the positioning detection.Besides,two receivers that are far from each other must communicate with each other to implement crosscorrelation in real-time data processing,but big data transmission is difficult in the ocean.Compared with crosscorrelation,autocorrelation means that each receiver works independently and only the fi nal autocorrelation result is to be transmitted.Actually,the scattered wave of target is always so weak that it is submerged in the autocorrelation result of the ambient noise.In this paper,we propose a method of processing the autocorrelation of the ambient noise.When the averaging noise autocorrelation of all receivers is subtracted from the autocorrelation result of the noise recorded by each receiver,the signalnoise ratio of the scattered wave will be signi fi cantly enhanced.With the help of Kirchhoff migration algorithm,detection of a scatterer can be implemented.We have conducted a scatterer passive detection experiment in Shilaoren beach,Qingdao,and accurately detected the position of a polyviny chloride pipe(about 8 m away from the nearest receiver)using only 12 min surf noise data.The experimental result shows that the processing of autocorrelation could replace cross-correlation in passive target detection when the ambient noise is time steady and the statistical characteristics of the background noise at di ff erent receivers are the same.Unlike Green’s function extracted from cross-correlation of ambient noise,each receiver can work independently without considering the problems of massive data transmission and timing synchronization,which may be suitable for target detection using multi-receivers and mobile platform.
autocorrelation of ambient noise,passive detection of scatters,silent target
11 April 2017;revised manuscript
4 July 2017)
(2017年4月11日收到;2017年7月4日收到修改稿)
10.7498/aps.66.194304
?國家自然科學(xué)基金(批準(zhǔn)號:11674294,11374270,11374271)和青島海洋科學(xué)與技術(shù)國家實驗室基金(批準(zhǔn)號:QNLM2016ORP0106)資助的課題.
?通信作者.E-mail:dzgao@ouc.edu.cn
?2017中國物理學(xué)會Chinese Physical Society
PACS:43.50.+y,43.60.+d
10.7498/aps.66.194304
*Project supported by the National Natural Science Foundation of China(Grant Nos.11674294,11374270,11374271)and the Foundation of Qingdao National Laboratory for Marine Science and Technology,China(Grant No.QNLM2016ORP0106).
?Corresponding author.E-mail:dzgao@ouc.edu.cn
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中等數(shù)學(xué)(2022年2期)2022-06-05 07:10:50
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年11期)2021-12-06 05:38:48
小學(xué)生學(xué)習(xí)指導(dǎo)(低年級)(2020年6期)2020-07-25 02:31:36
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
小學(xué)生學(xué)習(xí)指導(dǎo)(低年級)(2018年9期)2018-09-26 05:59:44
瘋狂英語·新讀寫(2018年2期)2018-09-07 09:32:10
數(shù)學(xué)小靈通·3-4年級(2017年6期)2017-06-22 11:28:50
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
