卡爾曼濾波在大功率伺服驅動器中的應用
2017-10-21 12:11:43程高
科技風 2017年12期
關鍵詞:單片機


摘要:本文介紹了基于XC167單片機及FPGA的20Kw伺服控制系統的設計方案;將卡爾曼濾波(EKF)技術應用于交流伺服系統的低速控制,完成系統低速下電機轉速的估計;在硬件平臺上使用C語言完成伺服控制系統的軟件編寫,完成控制系統的設計。
關鍵詞:交流伺服;EKF;單片機;功率模塊
交流伺服系統的性能主要取決于系統的低速控制性能,所以,提高伺服系統性能的關鍵在于提高低速控制性能。本文在分析了伺服驅動器硬件設計的基礎上,重點研究了卡爾曼濾波器和位置傳感器相結合的方法來進行伺服系統的低速的控制,并進行了軟件設計,給出了試驗波形。
1 伺服驅動器的硬件設計
本文設計的20Kw伺服驅動器硬件系統主要由主控單元和功率驅動單元,結構框圖如圖1所示。包括保護電路及CAN總線接口、單片機加FPGA基本系統系統幾大部分。
1.1 單片機主控電路
單片機主電路是指能使單片機內核正常運行、以及能對單片機進行調試的最簡硬件設計。包括XC167單片機、晶振、鎖相環、片外的數據存儲器、片外的程序存儲器、片外擴展的具有SPI接口的EEPROM等電路。單片機使用英飛凌公司單片機芯片XC167,單片機XC167外接晶振、復位電路、JTAG(即:仿真器)接口電路等基本電路之外,為滿足驅動器功能要求,單片機內部還配置了64K×16Bit的高速靜態存儲器,外部配置了128K×8Bit的非易失性存儲器(EEPROM)。由于EEPROM具有非易失性的特點,即使掉電也不會丟失數據,因此用其保存程序運行過程中的重要參數。需要說明的是,除片外數據存儲器外,輸入輸出單片機的I/O口的信號都要經過一級驅動,用以提高信號傳輸的可靠性。
1.2 IGBT模塊電路設計
本驅動器選輸出功率為20kW,母線電壓按540V計算,通過功率驅動模塊的電流為70A,根據轉換效率并進行降額設計,選用300A的功率模塊。本伺服驅動器選用英飛凌公司生產的高度集成化的IGBT晶體管FF300R12ME4作為功率輸出器件,該模塊采用絕緣基板工藝,內置優化后的柵級驅動和保護電路,具有輸入阻抗高、開關頻率高、所需驅動功率低、熱穩定性好和安全工作區大等優點,具有集成化的功率輸出電路,可直接連接負載,集成內置柵極驅動電路和保護電路(短路保護、過溫保護、驅動電壓欠壓保護),額定工作電流300A,最大工作電流達600A,工作溫度范圍40℃~+85℃,適用最大電壓為1200V。
2 卡爾曼濾波算法設計
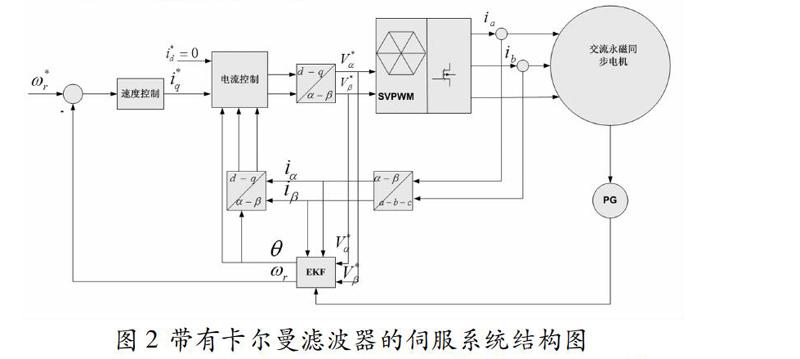
基于卡爾曼濾波器的伺服系統和位置傳感器的伺服系統在結構很相似,但區別是在轉子位置角和轉子速度的獲取,基于卡爾曼濾波器的伺服系統結構如圖2所示。
3 設計結果與分析
下面為以永磁同步電機為控制對象的實驗結果,電機參數如下:額定轉矩為74NM,額定轉速為1500r/min,額定功率為11.623KW。圖3為額定轉速為1500r/min,負載轉矩為74NM時的一相定子繞組的電流波形圖。電流波形顯示正弦性較好,此時電機運行平穩,機械噪聲較小,電機在低速下(5rpm)運行平穩,沒有振動、爬行的現象。
試驗結果表明,電機高速時,EKF算法的對系統影響不大,但電機低速情況下,基于EKF算法明顯改善了電機運行的各項性能指標,電機運行平穩,爬行現象消失。
4 結語
本文設計了基于XC167單片機及FPGA的20Kw伺服控制系統的設計方案,由FPGA完成保護電路的快速鎖存,其它由DSP完成模擬信號和串行總線的處理等,其中DSP完成三環(位置環、電流環、速度環)控制。通過卡爾曼濾波器估算電流反饋和速度反饋,試驗結果表明該方法可以明顯改善電機的低速性能。
參考文獻:
[1]楊益群,曹鋒.基于SPI高精度數據采集器.江蘇技術師范學院,2002(12):711.
[2]閏湛,虞鶴杠.基于DSP+FPGA的斷路器同步關合控制平臺的研制.北京:計算機測量與控制,2006.
[3]苗中華.基于滑模變結構控制的液壓伺服系統超低速軌跡跟蹤.上海交通大學學報,2008(7):11821186.
[4]孟凡軍,徐國柱.基于狀態觀測器的擾動補償在轉臺控制中的應用[J].中國慣性技術學報,2009,17(4):331335.
作者簡介:程高(1985),男,本科,助理工程師。
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設計工程(2015年15期)2015-02-27 12:07:30
電子設計工程(2015年8期)2015-02-27 12:05:36
