空間可變翼飛行器小翼伸縮自適應滑模控制
2017-10-17 12:35:55楊銘超江駒甄子洋李騰
哈爾濱工程大學學報 2017年9期
楊銘超,江駒,甄子洋,李騰
(南京航空航天大學 自動化學院,江蘇 南京 210016)
空間可變翼飛行器小翼伸縮自適應滑模控制
楊銘超,江駒,甄子洋,李騰
(南京航空航天大學 自動化學院,江蘇 南京 210016)
近空間可變翼飛行器具有可伸縮小翼結構,針對小翼伸出和收回狀態變化過程中,存在參數攝動,可能造成飛行器狀態以及控制量的大范圍跳變,影響飛行器的穩定性的問題,本文提出一種快速雙冪次趨近律滑模與神經網絡結合的自適應滑模控制方法。應用該方法設計快速雙冪次趨近律滑模控制器,并利用神經網絡充分逼近復雜的非線性關系能力,得到小翼伸縮全過程的滑模趨近律。對比分析傳統滑模控制方法和快速雙冪次滑模與神經網絡結合自適應控制效果,仿真結果表明快速雙冪次滑模控制與神經網絡結合方法具有良好的控制效果。
近空間可變翼飛行器; 小翼伸縮; 模態切換; 參數攝動; 神經網絡; 滑模控制; 快速雙冪趨近律; 自適應控制
Abstract:Nearspace morphing vehicles possess telescopic winglets. Aircraft stability may be affected by parameter perturbations, which is caused by the large- range hop to the state and the control volume of the aircraft during the stretching and withdrawal of the winglet. An adaptive sliding mode control method that combines fast double- power reaching law sliding mode with a neural network is proposed in this paper. A sliding mode controller is designed on the basis of the fast double- power reaching law. The neural network is used to model complex nonlinear relationships to obtain the reaching law of the sliding mode throughout the entirety of the stretching and withdrawal processes of the winglet. The proposed method is compared with the traditional sliding mode control method. The simulation results showed that the proposed method has an excellent control effect.
Keywords:nearspace morphing vehicle; winglet flexing; modal handoff; parameter perturbation; neural network; sliding mode control; fast double- power reaching law; adaptive control
近空間可變翼飛行器具有強非線性、快時變、強耦合以及不確定性等動態特性,給飛行器的控制系統設計帶來了困難[1-2]。顧臣風等提出針對近空間飛行器爬升段的跟蹤控制研究,采用反饋線性化的方式得到飛行器速度和高度的非線性方程[3]。吳雨珊等采用基于動態逆-PID的控制方式實現了對近空間飛行器的巡航段的姿態控制[4]。針對近空間可變翼飛行器不確定性的動態特點,焦鑫等提出二型模糊滑模控制的方法、自適應魯棒控制的方法和基于灰色預測滑模控制方式,設計了魯棒控制器,實現了對飛行器的穩定控制[5-7]。
滑動模態控制相對于傳統控制方法具有快速響應、對應參數變化及擾動不靈敏,無需系統在線辨識等優點[8-9]。雖然滑模控制方法具有眾多優點,但是傳統滑模控制方法仍然存在收斂速度慢,抖振嚴重等問題。梅紅等提出的雙冪次趨近律滑模控制方法,解決了收斂速度慢的方法,但是仍存在抖振的問題[10]。神經網絡具有大規模并行處理、分布式信息存儲、良好的自組織自學習能力,能夠充分逼近復雜的非線性關系,具有很好的魯棒性和容錯能力,可以增強控制中控制器的適應能力[11-12]。
針對近空間可變翼飛行器小翼伸縮過程中系統結構和參數存在不確定性問題,本文設計了快速雙冪次趨近律滑模控制和神經網絡結合的自適應控制器,保證了小翼伸縮切換過程穩定。
1 近空間可變翼飛行器數學模型
近空間可變翼飛行器是一個極其復雜的系統,包括自身氣動布局、發動機模型、空氣動力學模型、運動學模型等。在進行飛行器建模的研究時,不僅要考慮飛行器自身的氣動特性、動態結構、彈性形變和氣動熱等因素,也要考慮大氣環境的影響等。這對于飛行器的精確建模來說,十分復雜,難以實現。飛行器縱向模型主要由以下幾個方面組成。
1.1 氣動力模型
飛行器受到的升力和阻力計算公式如下

(1)

(2)
式中:ρ為大氣密度,V為速度,s為機翼面積,CL為升力系數,CD為阻力系數。
1.2 推力模型
近空間可變翼飛行器的發動機推力模型等效為二階模型[13]:
(3)
式中:β為發動機節流閥調定值,ζ為阻尼比,ω為固有頻率。
飛行器推力計算公式如下
(4)
(5)
式中:CT為發動機推力系數,T為發動機推力。
1.3 小翼伸縮模型
近空間可變翼飛行器在驗證仿真中小翼伸出和小翼收回的過程不是瞬變的,本文將其描述不同狀態下機翼面積變化,小翼伸縮模型如下
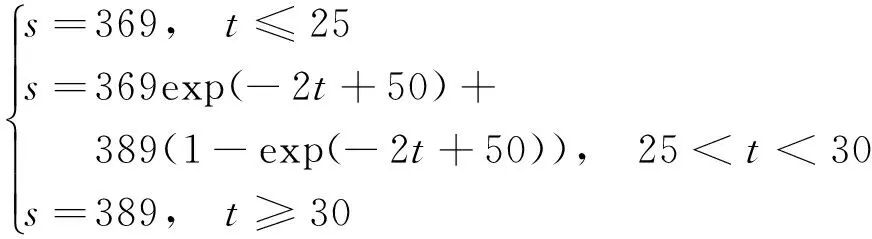
(6)
小翼在25 s時開始伸出,伸出前s為369 m2,在30 s時完成小翼的伸出,小翼完全伸出s為389 m2。小翼伸出過程中s變化影響飛行器升力系數CL、阻力系數CD和俯仰力矩系數CM發生變化。
在飛行器小翼伸縮過程中,由于機翼面積發生變化,使得飛行器的氣動參數發生變化,存在參數的攝動問題,傳統的控制器對這種變化的適應能力有限,針對此問題本文設計了小翼伸縮自適應滑模控制器。
1.4 動力學模型
近空間可變翼飛行器縱向運動方程[14-15]:
(7)
(8)
(9)
(10)

(11)
(12)
式中α、γ、q、h、m、μ、r、My、Iy分別為飛行器的迎角、俯仰角、俯仰角速率、高度、質量、地球引力常量、地球半徑、俯仰力矩和轉動慣量。
2 自適應滑模控制器設計
針對近空間可變翼飛行器小翼伸縮過程設計的自適應滑模控制器由滑模控制器和更新滑模趨近律參數的BP神經網絡兩部分構成。自適應滑模控制器采用快速雙冪次滑模趨近律。其結構如圖1所示。
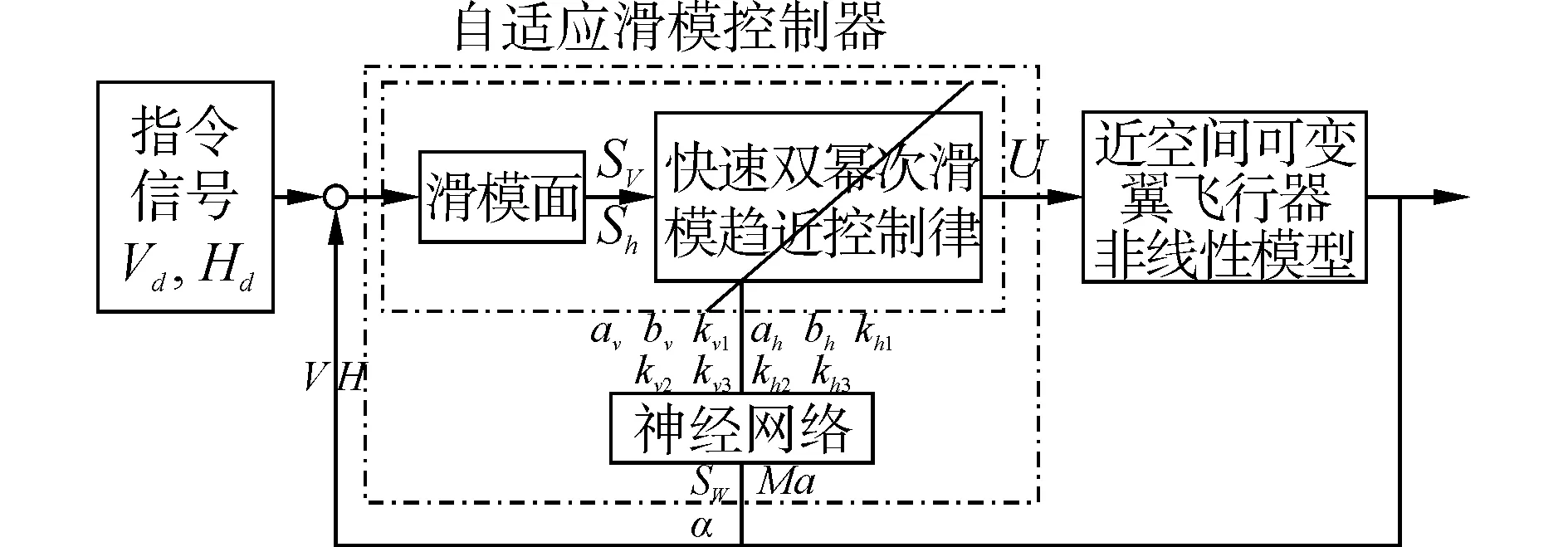
圖1 自適應滑模控制器結構圖Fig.1 Structure of adaptive sliding mode controller
近空間可變翼飛行器的高度非線性和嚴重耦合性導致其控制系統的設計存在較大難度。基于微分同胚理論、李導數和李括號等非線性系統的基本理論,對近空間飛行器模型的飛行速度V和飛行高度h進行輸入輸出精確反饋線性化處理,既可以保證模型的準確度又可以降低設計難度。
自適應滑模控制器設計的目標是通過設計合適的控制輸入量δe、βc,使控制系統在小翼伸出變化過程中飛行器的速度V和飛行高度h能夠良好的跟蹤設定的指令信號Vd和hd。
2.1 飛行器縱向模型精確反饋線性化
本文針對近空間可變翼飛行器的縱向非線性模型(7)~(10),對飛行速度V和飛行高度h進行精確反饋線性化處理,得到:
(13)
其中
(14)
(15)
(16)
Tαsin(α+γ)-Dαsinγ]
(17)
式中:cA為平均氣動弦長,ce和cβ為與δe和βc相關的啟動系數,Iy為轉動慣量。
2.2 快速雙冪次趨近律滑模控制律設計
飛行器實際飛行與指令信號的跟蹤誤差表示為
eV(t)=V(t)-Vd(t)
(18)
eh(t)=h(t)-hd(t)
(19)
針對近空間可變翼飛行器縱向非線性模型選擇適當的積分滑模面[4]:
(20)
式中:λv、λh為待設計正常數,積分項用于抑制穩態誤差。

(21)
對指令跟蹤誤差進行求導:
e?h(t)=V?(t)-V?d(t)
(22)
(23)

(24)
設計快速雙冪次趨近律:

(25)
式中:kh1、kh2、kh3、kV1、kV2、kV3>0,0<αV,αh<1,βV、βh>1,sgn(SV)、sgn(Sh)為符號函數。
滑模控制器由兩部分構成,分別為等效控制項(24)和快速雙冪次趨近律控制項(25),可以得到快速雙冪次趨近滑模控制律為

(26)
2.3 穩定性分析
本節對設計的快速雙冪次趨近律滑模控制的穩定性進行驗證,首先定義李亞普諾夫函數:
(27)
函數對時間t的導數為

(28)
當kV1、kV2、kV3、kh1、kh2、kh3為正常數時,V′≤0,證明系統狀態夠到達切換面,滿足系統穩定條件。
2.4 神經網絡設計
近空間可變翼飛行器小翼伸出過程中,飛行器氣動參數產生攝動。研究小翼伸縮過程的自適應控制,利用BP神經網絡對小翼伸縮過程中所對應的滑模趨近律參數進行學習、訓練。在小翼伸出過程中實時更新不同狀態下的趨近律參數。
BP神經網絡結構如圖2所示。
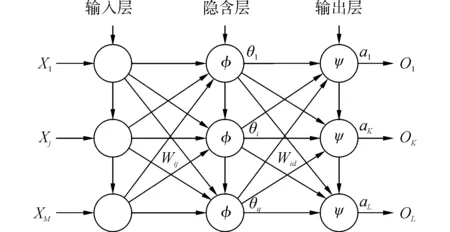
圖2 BP神經網絡結構圖Fig.2 Structure of BP neural network
圖2中,X為BP神經網絡的輸入為近空間可變翼飛行器小翼伸縮過程中的機翼面積SW、迎角α、馬赫數Ma,通過訓練后網絡的輸出o為同步更新小翼伸縮過程中快速雙冪次滑模趨近律的系數av、bv、ah、bh、kv1、kv2、kv3、kh1、kh2、kh3。
3 仿真驗證
為了驗證設計的控制器能夠穩控制近空間可變翼飛行器小翼伸縮過程,仿真條件及參數設置如下:飛行器模型在25 s時小翼由收回狀態開始伸出,30 s時小翼完全伸出,機翼面積由收回狀態下s=369變為s=389。小翼伸出過程中,氣動參數發生變化,且小翼伸縮過程具有不確定性。
1)小翼收回模態下速度和高度初值為
Vro=4 590 m/s,hro=33 528 m
指令信號為
Vrd=4 630 m/s,hrd=33 588 m
2)小翼伸出模態下速度和高度初值為
Vso=4 630 m/s,hso=33 588 m
指令信號為
Vsd=4 590 m/s,hrd=33 528 m
仿真驗證對比傳統滑模控制和自適應滑模控制兩種小翼伸出過程的控制效果。圖3、4給出了飛行器速度和高度響應曲線,可以看出自適應滑模控制具有較好的快速性和抑制抖動的能力,上升時間叫滑模控制提升50%。圖5、6給出了飛行器的狀態航跡角和迎角以的變化曲線,從中可以看出自適應滑模控制下航跡角的變化較滑模控制減小30%,迎角和俯仰角變化率抖動小,表現出飛行器的多面抖動也小。圖7、8給出控制輸入舵面偏轉角以及油門開合度的變化曲線,自適應滑模控制的舵偏量為滑模控制的50%,且油門開合未達到飽和,滑模控制的油門開合飽和,說明自適應滑模控制速度和高度跟蹤性能更優。
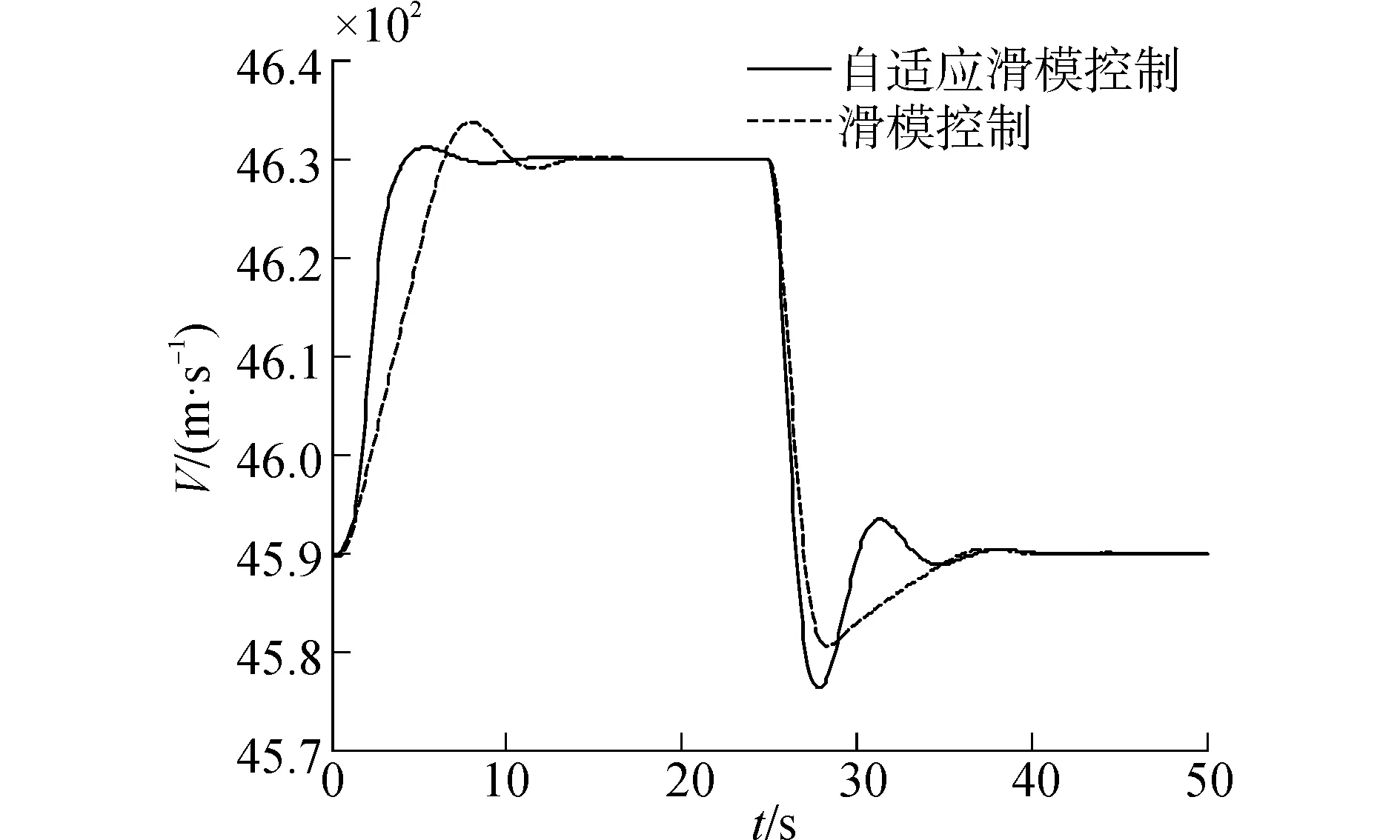
圖3 速度跟蹤曲線Fig.3 Velocity tracking curves
近空間可變翼飛行器在小翼伸出過程中具有參數不確定性,為了驗證快速雙冪次趨近律滑模控制和神經網絡結合的自適應滑模控制器的魯棒性,若機翼浸潤面積Sw、大氣密度ρ、俯仰力矩慣性積、俯仰力矩系數中的參數ce、翼弦長c存在攝動,表示為
|ΔIy|/Iy0=0.05,|Δc|/c0=0.05
|ΔSw|/Sw0=0.05,|Δρ|/ρ0=0.05
|Δce|/ce0=0.05
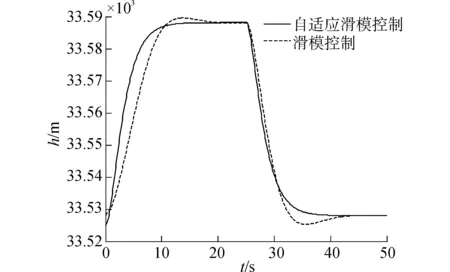
圖4 高度跟蹤曲線Fig.4 Altitude tracking curves
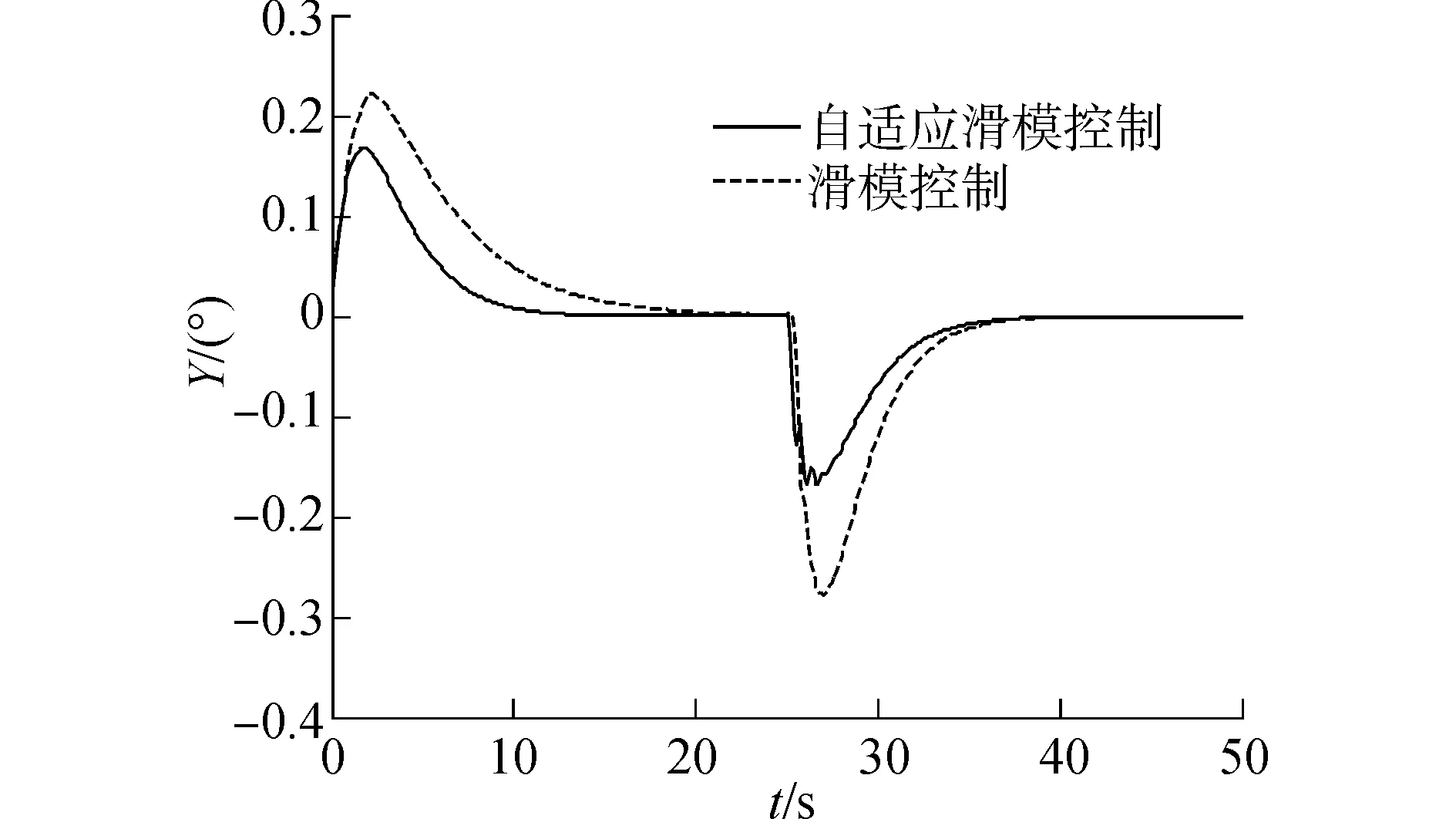
圖5 航跡角曲線Fig.5 Track angle curves
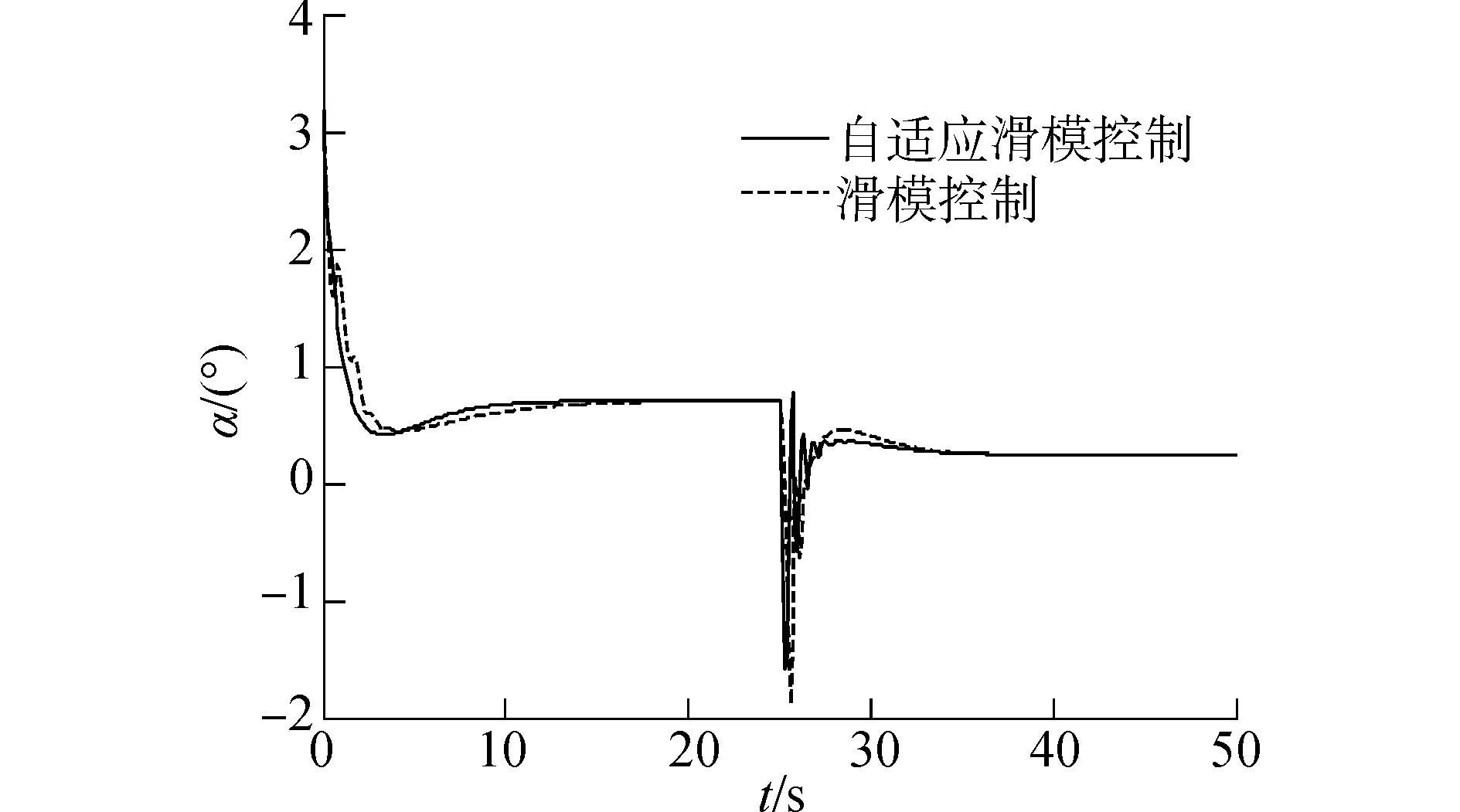
圖6 迎角曲線Fig.6 Attack angle curves
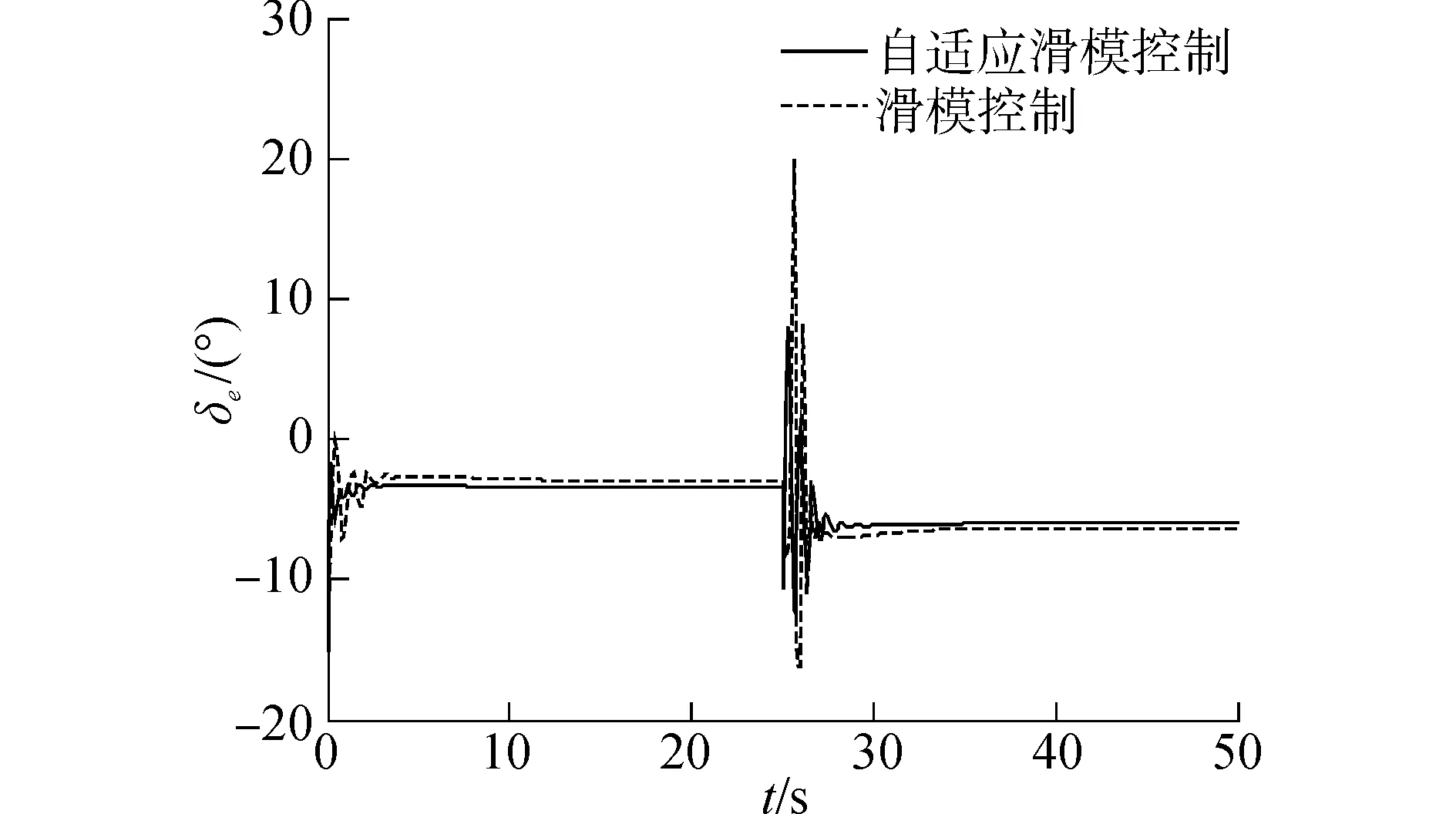
圖7 升降舵偏角曲線Fig.7 Elevator deflection curves
在數值仿真過程中加入不確定參數攝動,分析快速雙冪次趨近律滑模控制和神經網絡結合的自適應滑模控制器的魯棒性。
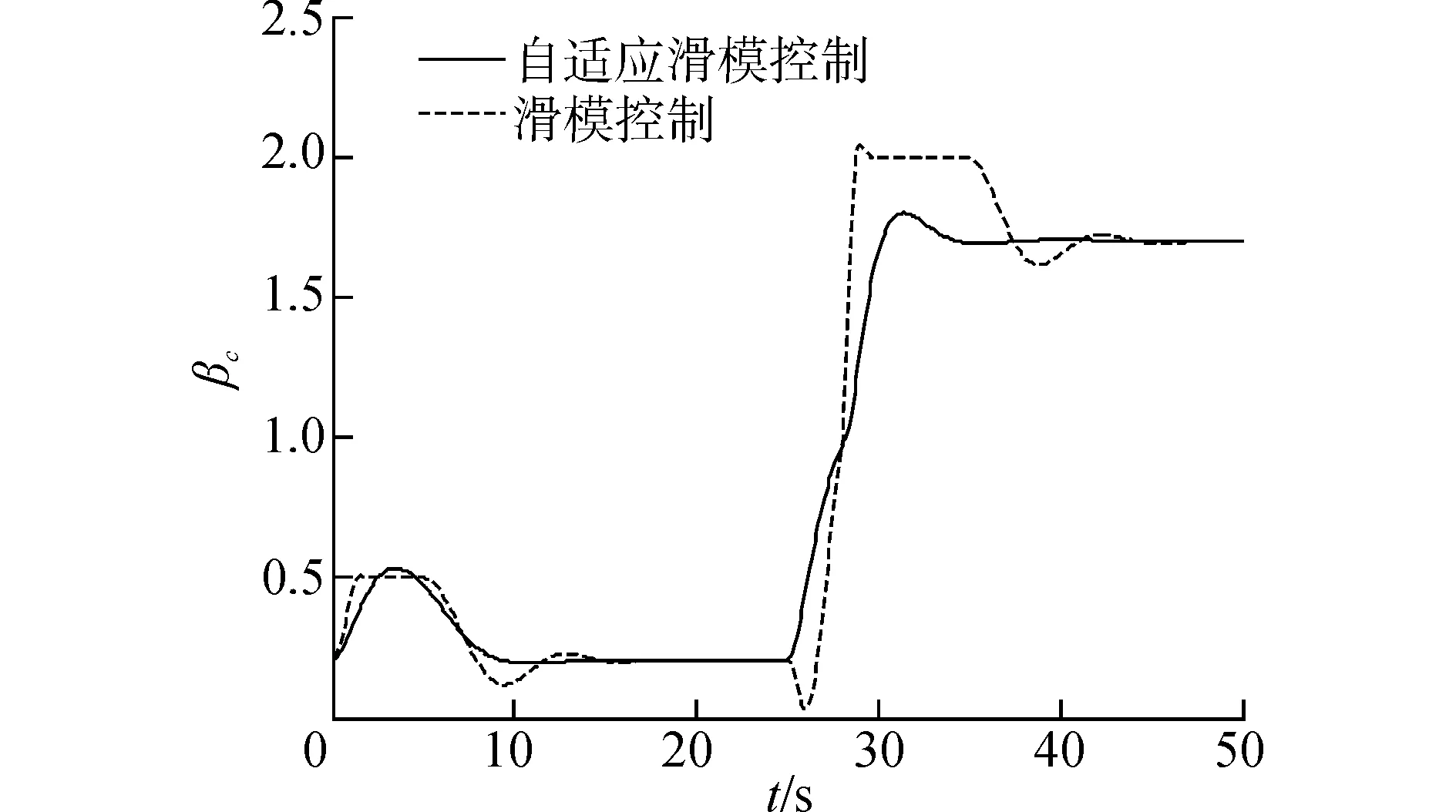
圖8 油門開合曲線Fig.8 Throttle opening curves
與未加參數攝動的控制輸入對比分析,結果如圖9~14所示,在加入參數攝動的小翼伸出過程中,速度和高度同未加參數攝動的情況基本相同,升降舵偏角發生微小的變化,但與整個偏轉幅度相比可以忽略不計。因此,針對小翼伸縮過程設計的快速雙冪次趨近律滑模控制和神經網絡結合的自適應滑模控制器在小翼伸縮過程存在參數攝動的情況下具有較好的控制效果,魯棒性較強。
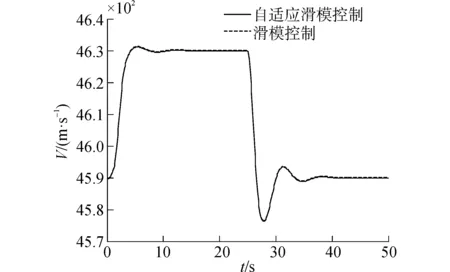
圖9 參數攝動速度曲線Fig.9 Velocity error curves
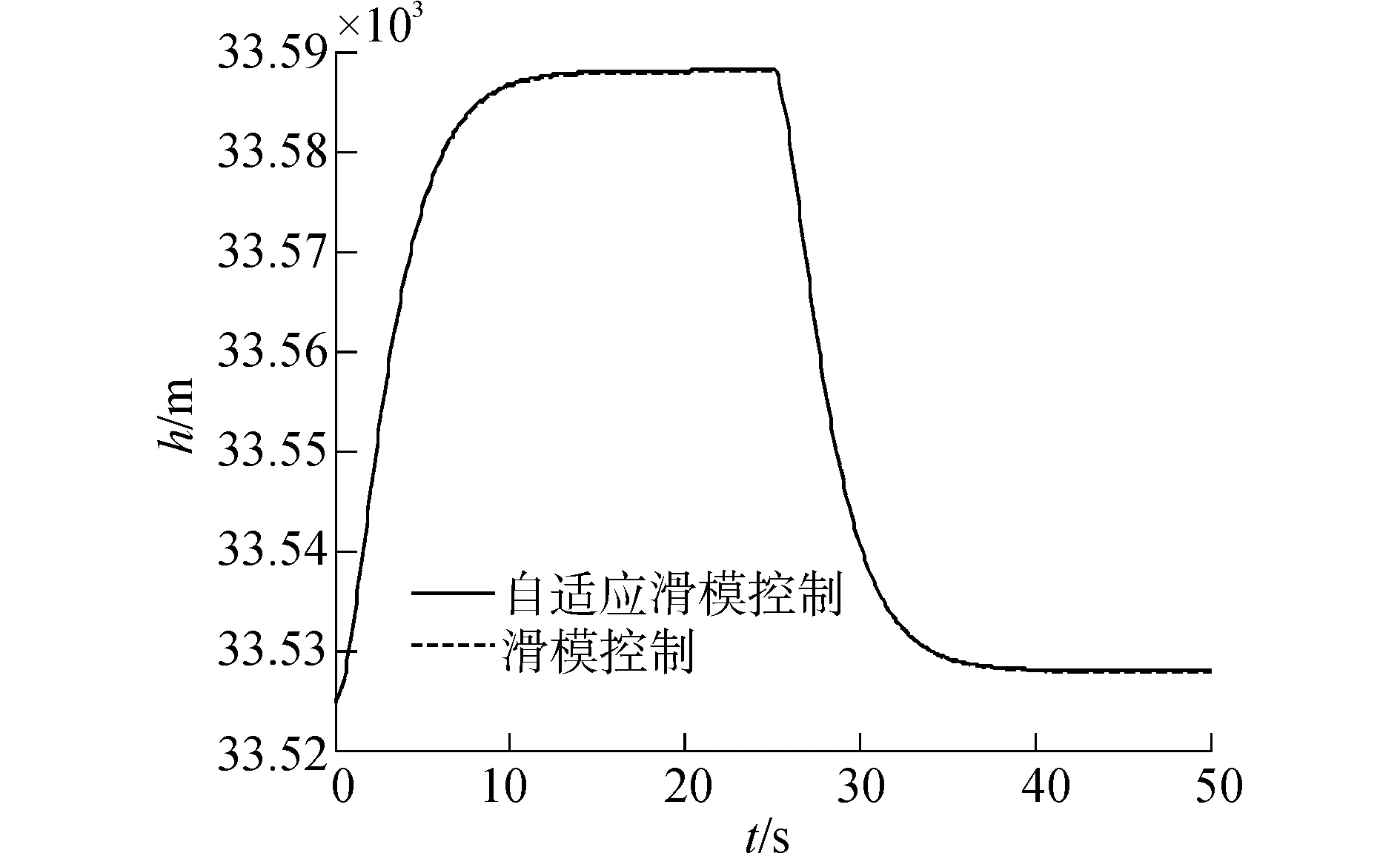
圖10 參數攝動高度跟蹤曲線Fig.10 Altitude tracking curves
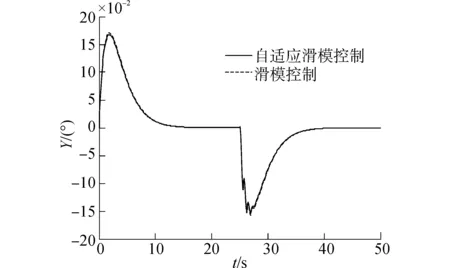
圖11 參數攝動航跡角曲線Fig.11 Track angle curves
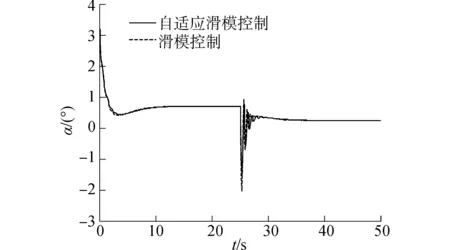
圖12 參數攝動迎角曲線Fig.12 Attack angle curves
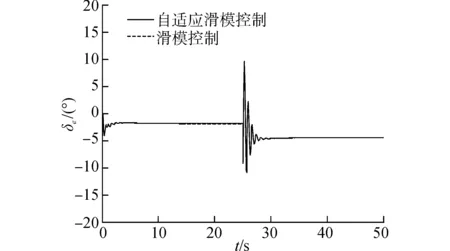
圖13 參數攝動升降舵偏角曲線Fig.13 Elevator deflection curves
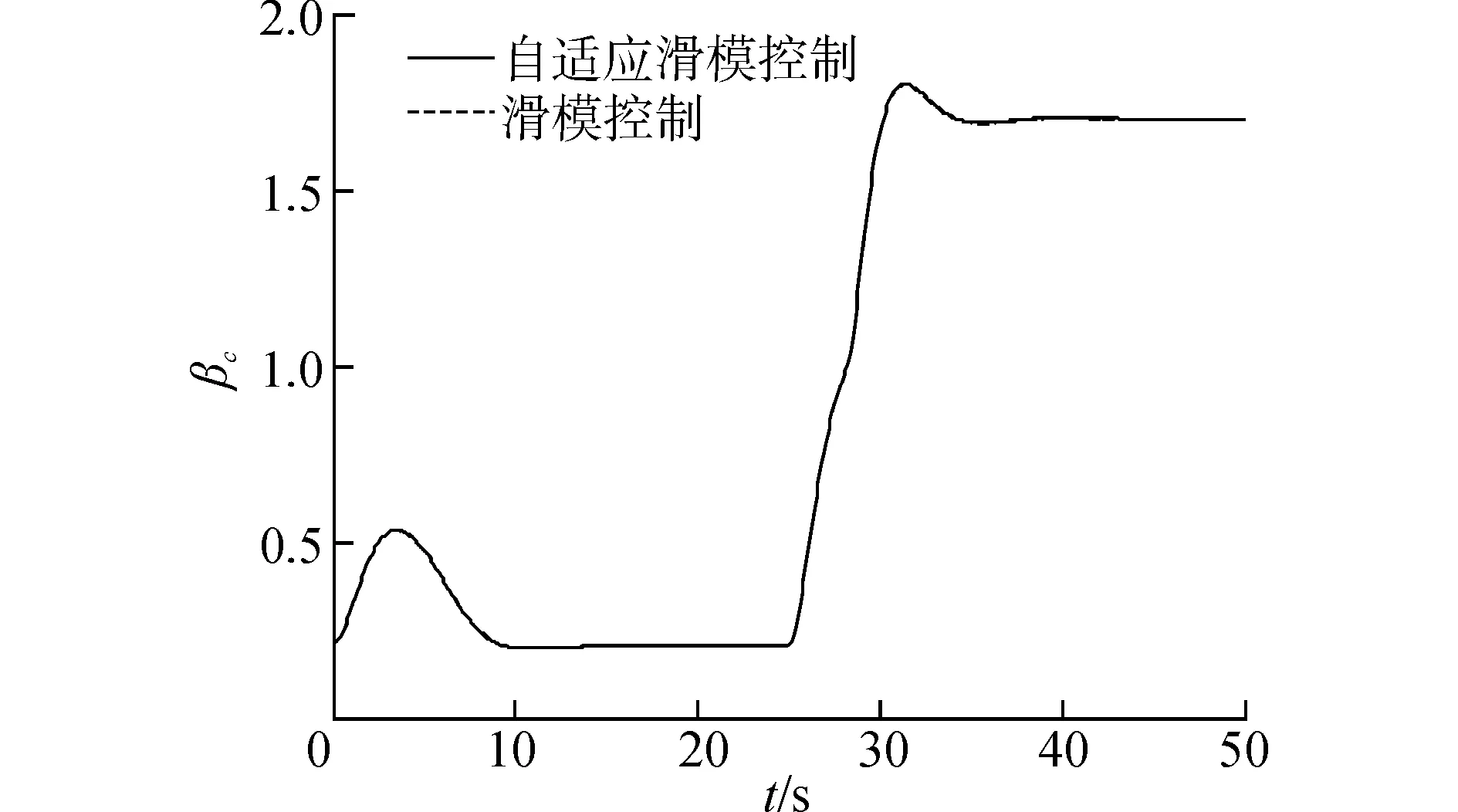
圖14 參數攝動油門開合曲線Fig.14 Throttle opening curves
4 結論
1)快速雙冪次趨近律滑模控制和神經網絡結合的自適應滑模控制器能更好的抑制升降舵偏角在小翼伸縮瞬間的跳變,具有更好的跟蹤精度,并且具有較強的魯棒性。
2)使用快速雙冪次滑模趨近律實現滑模面的快速穩定收斂。
3)使用神經網絡更新滑模控制律參數。未來的研究中可針對近空間飛行器模型存在的彈性攝動進行深入研究。
[1] 吳宏鑫,孟斌. 高超聲速飛行器控制研究綜述[J]. 力學進展, 2009, 39(6): 756-765. WU Hongxin, MENG Bin. Summary of control research on hypersonic vehicle[J]. Advances in mechanics, 2009, 39 (6): 756-765.
[2] 方存光,孫勇,王偉. 高超聲速飛行器及其飛行狀態控制[J]. 控制工程,2008(S1):21-23. FANG Cunguang, SUN Yong, WANG Wei. Hypersonic vehicle and its flight state control[J]. Control engineering, 2008(S1): 21-23.
[3] 顧臣風, 江駒, 吳雨珊. 近空間飛行器爬升跟蹤控制[J]. 哈爾濱工程大學學報, 2016, 36(11): 1526-1531. GU Chenfeng, JIANG Ju, WU Yushan. A near space vehicle ascent tracking control [J]. Journal of Harbin Engineering University, 2016, 36(11): 1526-1531.
[4] 吳雨珊,江駒,甄子洋,等. 基于動態逆-PID的高超聲速飛行器巡航姿態控制[J]. 飛行力學, 2015(2): 145-149. WU Yushan, JIANG JU, ZHEN Ziyang, et al. hypersonic cruise attitude based on- PID[J]. Control of dynamic inverse flight dynamics, 2015(2): 145-149.
[5] JIAO Xin, BARIS F, JIANG Ju, et al. Adaptive mode switching of hypersonic morphing aircraft based on type- 2 TSK fuzzy sliding mode control[J]. Sciece China information sciences, 2015, 58(7):1-15.
[6] 焦鑫,江駒. 非線性系統自適應魯棒控制器設計[J]. 哈爾濱工程大學學報,2016(3): 402-407.
JIAO Xin, JIANG Zi. Design of adaptive robust controller for nonlinear system [J]. Journal of Harbin Engineering University, 2016(3): 402-407.
[7] 焦鑫,江駒,孟宏鵬. 基于灰色預測滑模控制的魯棒飛行控制器設計[J]. 飛行力學,2015(6): 542-546-550. JIAO Xin, JIANG Zi, MENG Hongpeng. Robust flight controller design based on grey prediction sliding mode control [J]. Flight mechanics, 2015(6): 542-546-550.
[8] SUN H, LI S, SUN C. Finite time integral sliding mode control of hypersonic vehicles[J]. Nonlinear dynamics, 2013, 73(1-2): 229-244.
[9] YU S, YU X, SHIRINZADEH B, et al. Continuous finitetime control for robotic manipulators with terminal sliding mode[J]. Automatica, 2005, 41(11): 1957-1964.
[10] MEI H, WANG Y. Fast convergent sliding mode variable structure control of robot[J]. Information and control, 2009, 38(5): 552-557.
[11] 朱堅民, 沈正強, 李孝茹,等. 基于神經網絡反饋補償控制的磁懸浮球位置控制[J]. 儀器儀表學報, 2014, 35(5):976-986. ZHU Jianmin, SHEN Zhengqiang, LI Xiaoru, et al. Position control of magnetic levitation ball based on neural network feedback compensation control [J]. Journal of instrumentation, 2014, 35 (5): 976-986.
[12] 吳玉香, 王聰. 不確定機器人的自適應神經網絡控制與學習[J]. 控制理論與應用, 2013, 30(8):990-997. WU Yuxiang, WANG Cong. Adaptive neural network control and learning for uncertain robots. [J]. Control theory and application, 2013, 30 (8): 990-997.
[13] 丁洪波, 蔡洪. 基于特征參數的吸氣式高超聲速飛行器上升段軌跡優化[J]. 固體火箭技術, 2012, 35(3): 296-300. DING Hongbo, CAI Hong. Optimization of ascent trajectory of an air breathing hypersonic vehicle based on characteristic parameters [J]. Solid rocket technology, 2012, 35 (3): 296-300.
[14] XU H, MIRMIRANI M D, LOANNOU P A. Adaptive sliding mode control design for a hypersonic flight vehicle[J]. Journal of guidance, control, and dynamics, 2004, 27(5): 829-838.
[15] WANG Q, STENGEL R F. Robust nonlinear control of a hypersonic aircraft[J]. Journal of guidance control & dynamics, 2000, 23(23):577-585.
Adaptiveslidingmodecontrolforthetelescopicwingletofanearspacemorphingvehicle
YANG Mingchao, JIANG Ju, ZHEN Ziyang, LI Teng
(College of Automation Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China)
10.11990/jheu.201605017
http://www.cnki.net/kcms/detail/23.1390.u.20170427.1510.068.html
V249
A
1006- 7043(2017)09- 1420- 06
2016-05-05. < class="emphasis_bold">網絡出版日期
日期:2017-04-27.
國家自然科學基金項目(61673209);南京航空航天大學校開放基金項目(kfjj20150320).
楊銘超(1991-), 男, 碩士研究生; 江駒(1963-),男,教授,博士生導師.
楊銘超,E- mail:loganyang@foxmail.com.
本文引用格式:楊銘超,江駒,甄子洋,等. 空間可變翼飛行器小翼伸縮自適應滑模控制[J]. 哈爾濱工程大學學報, 2017, 38(9): 1420-1425.
YANG Mingchao, JIANG Ju, ZHEN Ziyang, et al. Adaptive sliding mode control for the telescopic winglet of a nearspace morphing vehicle[J]. Journal of Harbin Engineering University, 2017, 38(9): 1420-1425.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
現代裝飾(2020年7期)2020-07-27 01:27:42
數學物理學報(2020年2期)2020-06-02 11:29:24
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03