無線供電形狀記憶合金驅動的尿道閥驅動特性研究
2017-10-17 09:33:08張燃李笑曹睿關婷
中國機械工程 2017年19期
關鍵詞:實驗
張 燃 李 笑 曹 睿 關 婷
1.廣東工業大學機電工程學院,廣州,510006 2.廣州軍區廣州總醫院,廣州,510010
無線供電形狀記憶合金驅動的尿道閥驅動特性研究
張 燃1李 笑1曹 睿1關 婷2
1.廣東工業大學機電工程學院,廣州,510006 2.廣州軍區廣州總醫院,廣州,510010
為了解決尿道括約肌損傷或神經功能障礙引起的重度尿失禁問題,設計了一種磁耦合諧振式無線供電形狀記憶合金彈簧驅動的尿道閥。建立了尿道閥的驅動力模型和無線電能傳輸耦合模型,仿真分析了彈簧結構參數對驅動力的影響規律,通過實驗研究了無線供電系統的控制參數和線圈結構參數對尿道閥驅動特性的影響規律以及尿道閥的啟閉特性。研究結果表明,該尿道閥原理可行;增大彈簧線徑,減小彈簧中徑和匝數,增大信號源電壓,增大線圈直徑、線徑和匝數以及合理設定信號源頻率,均可提高驅動特性;尿道閥啟閉特性良好。研究結果可為尿道閥結構設計提供依據,也可為人體其他括約肌自主控制的設計提供參考。
尿道閥;形狀記憶合金;磁耦合諧振;驅動特性;啟閉特性
Abstract:In order to solve the problems of severe urinary incontinence caused by urethral sphincter injuries or dysfunctions, a urethral valve driven by SMA spring was designed based on magnetic coupled resonant wireless power supply. The driving force model of the valve spool and the coupling model of wireless power transfer were established. The influences of the spring structure parameters on the driving forces were simulated and analyzed. The effects of the control parameters and the structure parameters of the wireless power supply system on the driving performances of the urethral valve, and the opening and closing performances of the urethra valve were studied experimentally. The results show that the principles of urethral valve are feasible, increasing the spring wire diameter, reducing the spring pitch diameter and the number of spring turns, increasing the signal source voltages, the coil wire diameters, the coil diameters and the numbers of coil turns and setting the reasonable frequency of the signal sources may improve the driving performances, and the opening and closing performances of the urethra valve are good. The research may provide the basis for the structural design of the urethral valve, and also provide the reference for the design of autonomous control system for other human sphincters.
Keywords:urethral valve; shape memory alloy(SMA); magnetic coupled resonant; driving performance; opening/closing performance
0 引言
尿道括約肌損傷或神經功能障礙引起的自主控制排尿困難,會導致尿液不自主地流出,醫學上稱之為尿失禁[1]。它不僅給病人帶來了極大的生活困擾,也易引起泌尿系統感染或其他并發癥,嚴重影響病人的生活質量。對于重度型患者,通常難以用藥物或手術治愈,需采取尿道自主控制措施[2-3],因此,研究能夠實現病人自主控制的尿道閥,具有重要的臨床實際意義。
國內外已有學者對尿道閥開展了模擬和動物實驗研究。文獻[4-5]提出了一種利用加熱電阻絲傳熱致形狀記憶合金(shape memory alloy,SMA)形變驅動的尿道閥,研究了尿道閥的機械特性、啟閉特性、尿流率和耐用性。文獻[6-8]引入電磁感應式無線電能傳輸模式來實現能量傳遞,實驗研究了經皮能量傳輸系統的效率和尿道閥的啟閉特性。文獻[9-10]提出了一種利用電磁力驅動的尿道閥,建立了尿道閥的尿流率模型和可靠性模型,仿真和實驗研究了尿道閥的尿流率特性和可靠性。文獻[11]提出了一種超聲汽化蒸汽驅動的尿道閥,建立了驅動力模型和磁吸力模型,仿真和實驗研究了尿道閥的驅動特性和啟閉特性。以上研究均表明尿道閥工作原理可行,尚需進一步優化結構和改善性能。
磁耦合諧振式無線供電系統具有傳輸效率高、傳輸距離遠的優點,而SMA彈簧具有響應迅速、回復力大等特點。據此,本文提出一種磁耦合諧振式無線供電SMA彈簧驅動的尿道閥。運用電磁學、材料學和熱力學理論建立了尿道閥的數學模型,仿真分析了彈簧結構參數對驅動力的影響,實驗研究了無線供電系統的控制參數和線圈結構參數對尿道閥驅動特性的影響規律及尿道閥的啟閉特性。
1 工作原理
本文提出的SMA驅動的尿道閥組成原理如圖1所示,主要由SMA彈簧、閥芯、閥體、永磁體和橡膠墊組成。SMA彈簧是鎳鈦合金圓柱形螺旋彈簧。閥芯由非金屬材料制成,閥芯安裝在閥腔內。永磁體由汝鐵硼永磁材料制成,一塊與閥體固連,另一塊與閥芯固連。橡膠墊由醫用硅橡膠材料制成,分別與兩塊永磁體固連。
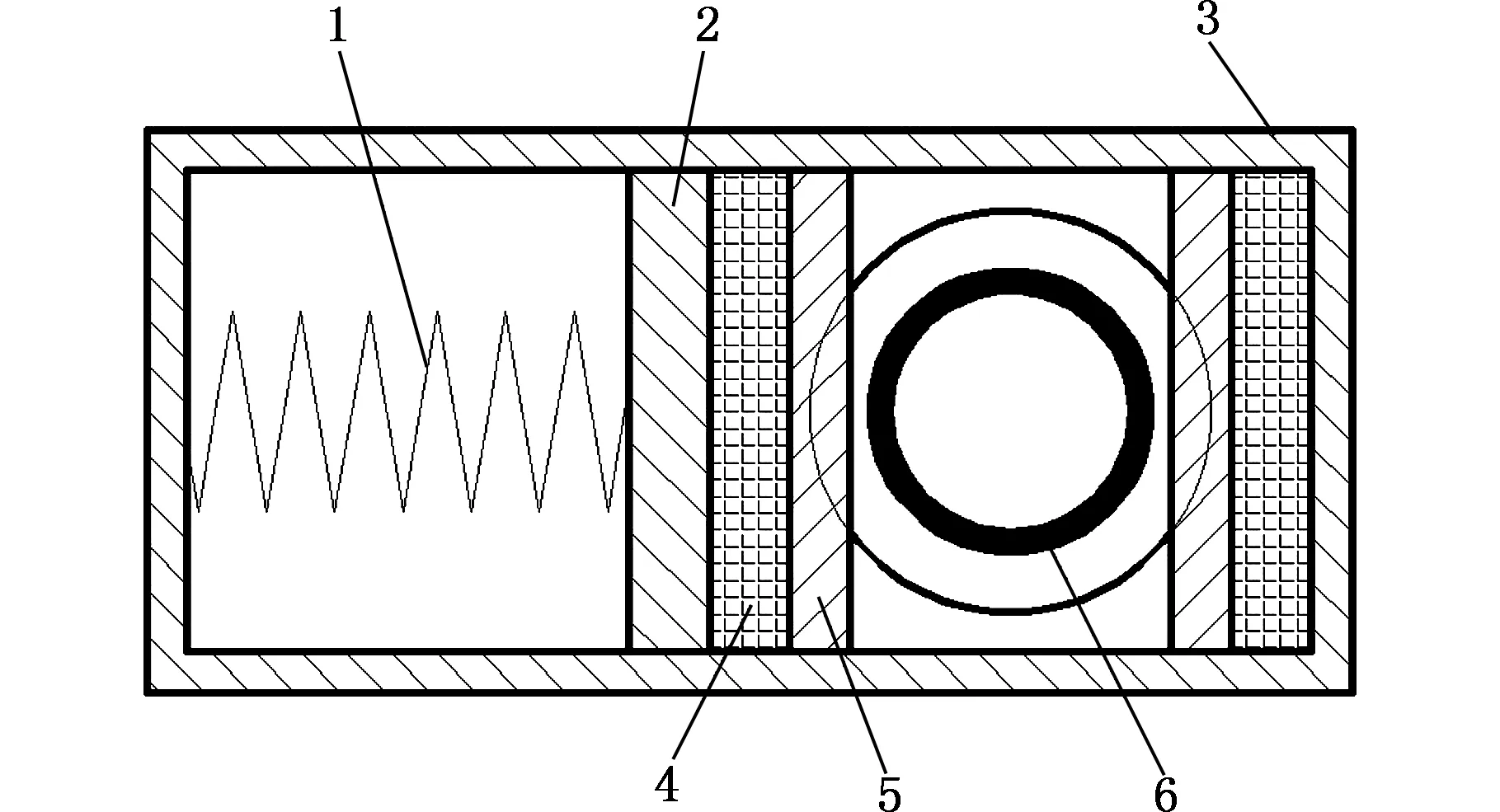
1.SMA彈簧 2.閥芯 3.閥體 4.永磁體 5.橡膠墊 6.尿道圖1 SMA驅動的尿道閥組成原理Fig.1 SMA drive urethral valve composition principle
磁耦合諧振式無線供電系統組成原理如圖2所示,主要包括體外的信號源、功率放大器、發射線圈和體內的接收線圈。其中,RP為匹配負載電阻,R為SMA彈簧電阻,C1、C2為電容。
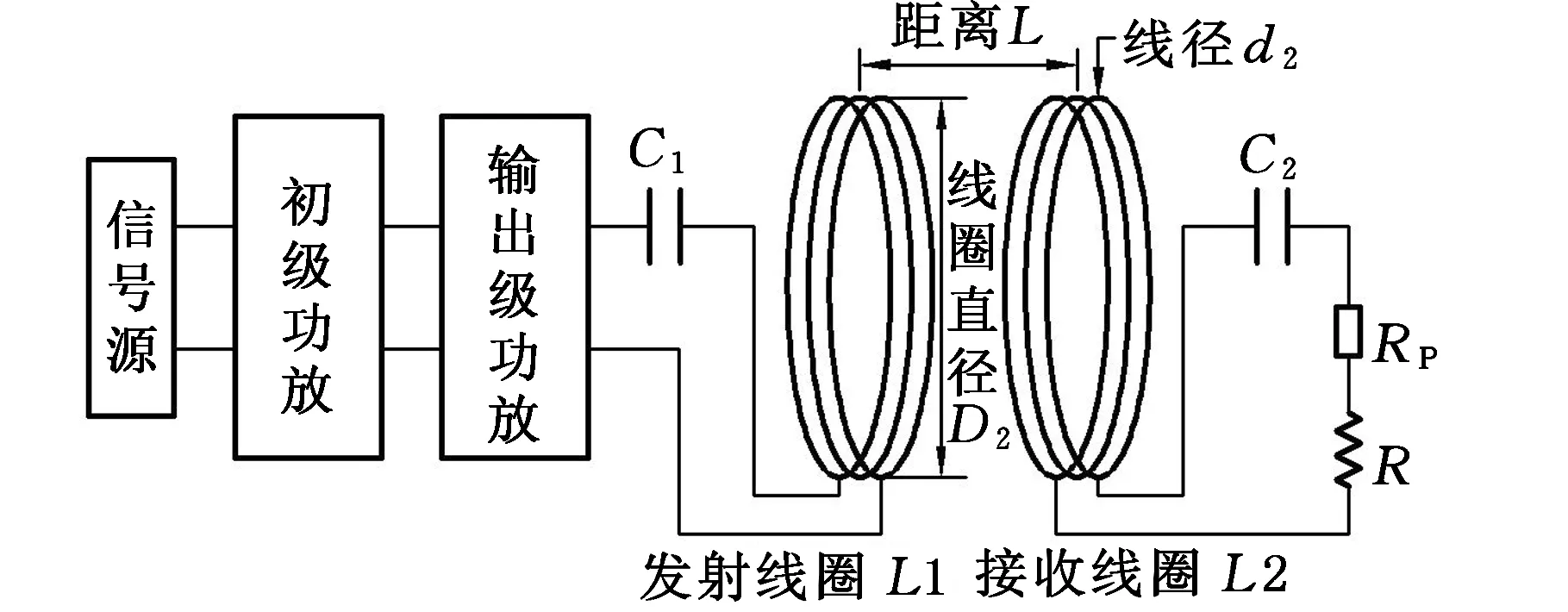
圖2 磁耦合諧振式無線供電系統組成原理Fig.2 Composition principle of magnetically coupled resonant wireless power supply system
尿道閥的工作原理是:當信號源未輸出高頻電信號時,發射線圈不產生磁場,接收線圈無能量傳輸,SMA彈簧處于初始的拉伸狀態,閥芯在永磁體的磁吸力作用下,處于初始位置,尿道保持閉合;當信號源輸出高頻電信號時,功率放大器將信號放大,發射線圈產生磁場,接收線圈通過磁耦合諧振將磁能轉換為電能并傳遞給SMA彈簧,彈簧在電能轉換成熱能過程中,達到SMA的相變點溫度,產生回復力,當彈簧的回復力達到永磁體的磁吸力時,閥芯移動,尿道開啟,膀胱內尿液從尿道連續排出;排尿后,信號源停止工作,SMA彈簧隨溫度下降,驅動力減小,閥芯在永磁體的磁吸力作用下復位,尿道閉合。病人只要重復上述過程,便能達到自主控制排尿的目的。
該尿道閥具有以下特點:利用SMA彈簧相變回復力開啟尿道,回復力大,驅動能力強;利用永磁體磁吸力閉合尿道,永磁體磁性持久,閉合力穩定,長期使用可靠;采用磁耦合諧振式無線電能傳輸供電,可避免體外充電、電池的泄漏或更換困擾等問題;尿道不開孔不造成肌肉組織感染;尿道閥各元件與尿液不接觸,不引起泌尿系統感染或其他并發癥;橡膠墊與尿道外壁接觸,不造成器官的機械損傷;利用尿道內壁的閉合實現密封,符合人體生理結構特點。
2 驅動力模型
根據尿道閥組成原理,忽略作用于閥芯和永磁體的摩擦力,尿道閥開啟時的閥芯受力平衡方程為

(1)
式中,Fd為SMA彈簧回復力(即閥芯的驅動力);me為閥芯和永磁體等效質量;BP為閥芯和永磁體等效黏性系數;K為橡膠墊彈性系數;λ為SMA彈簧行程(即閥芯位移);Fm為永磁體磁吸力。
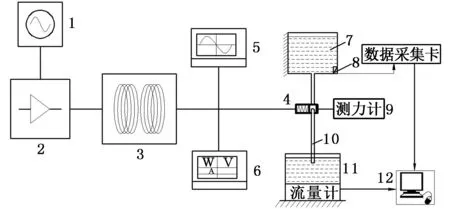
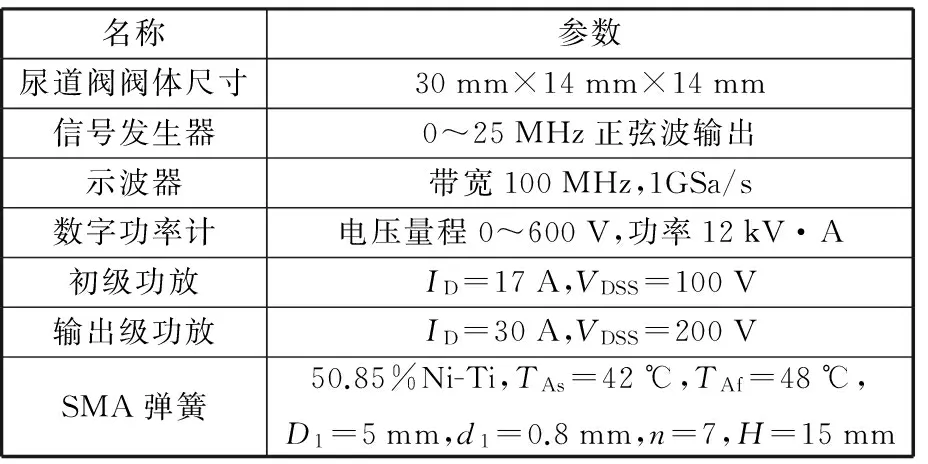
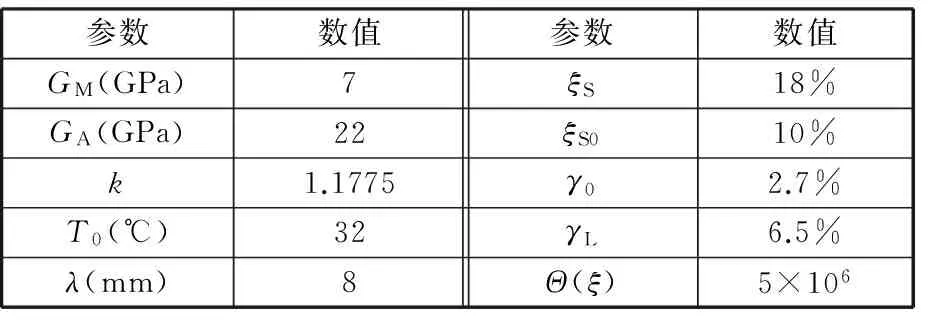
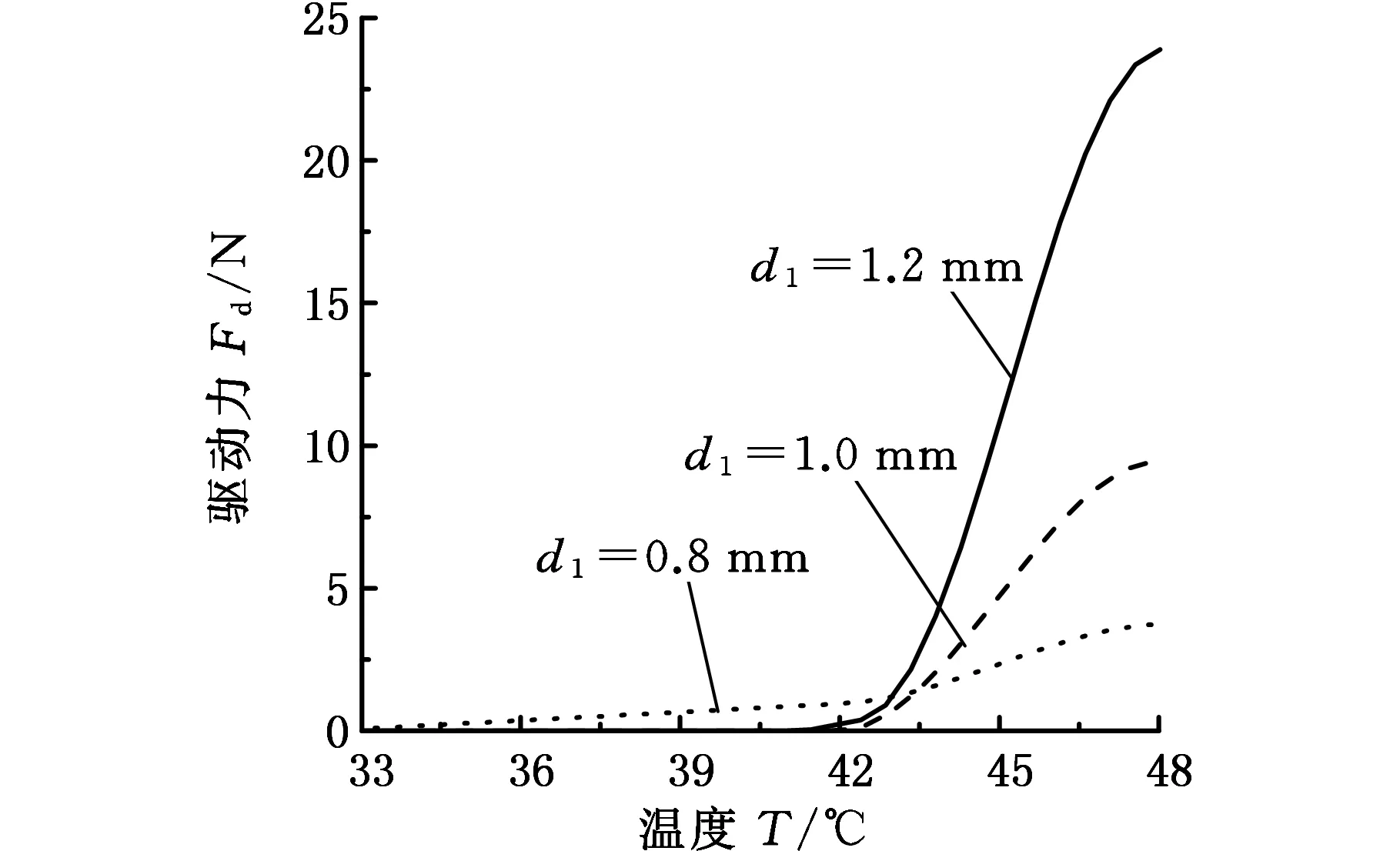
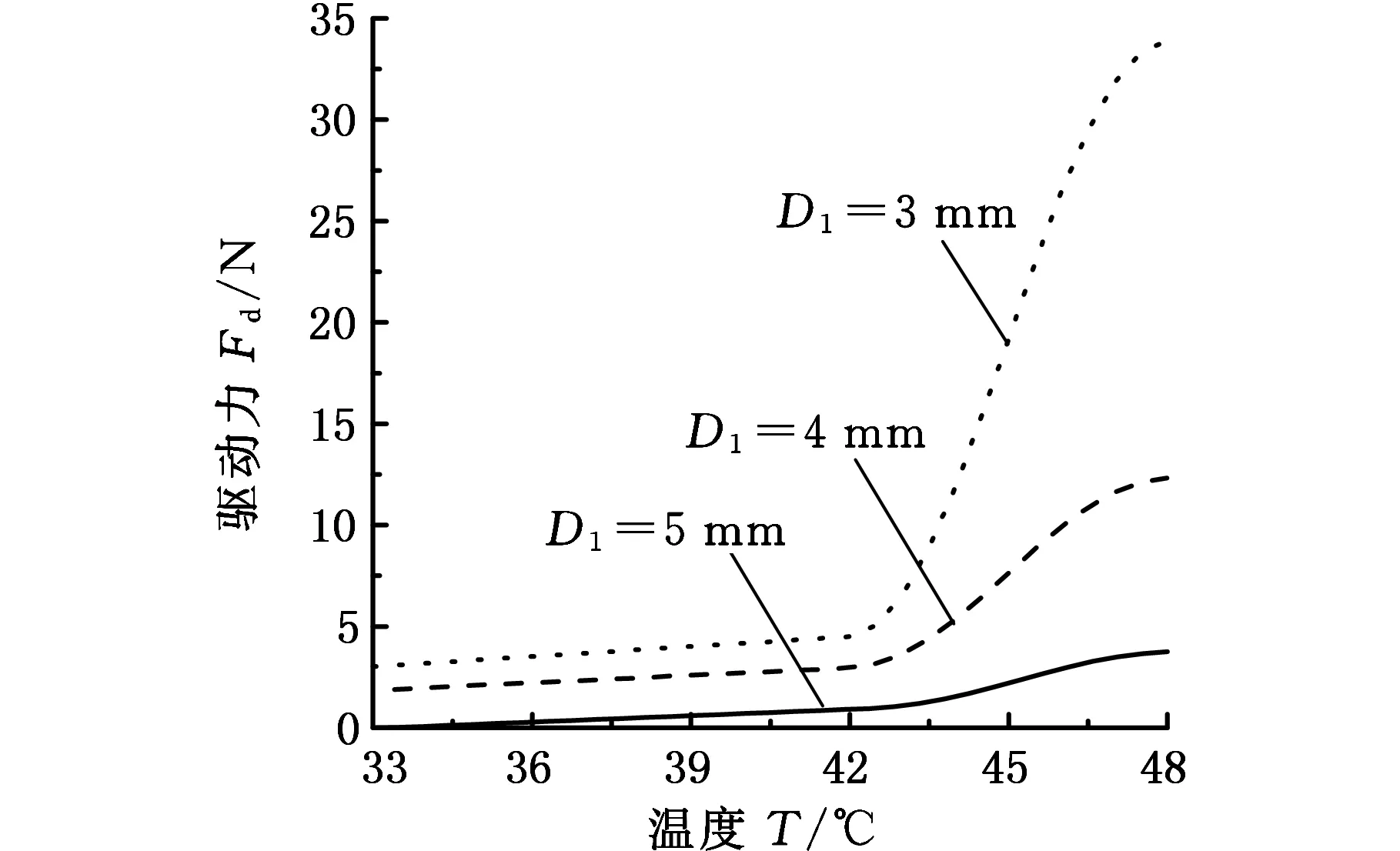
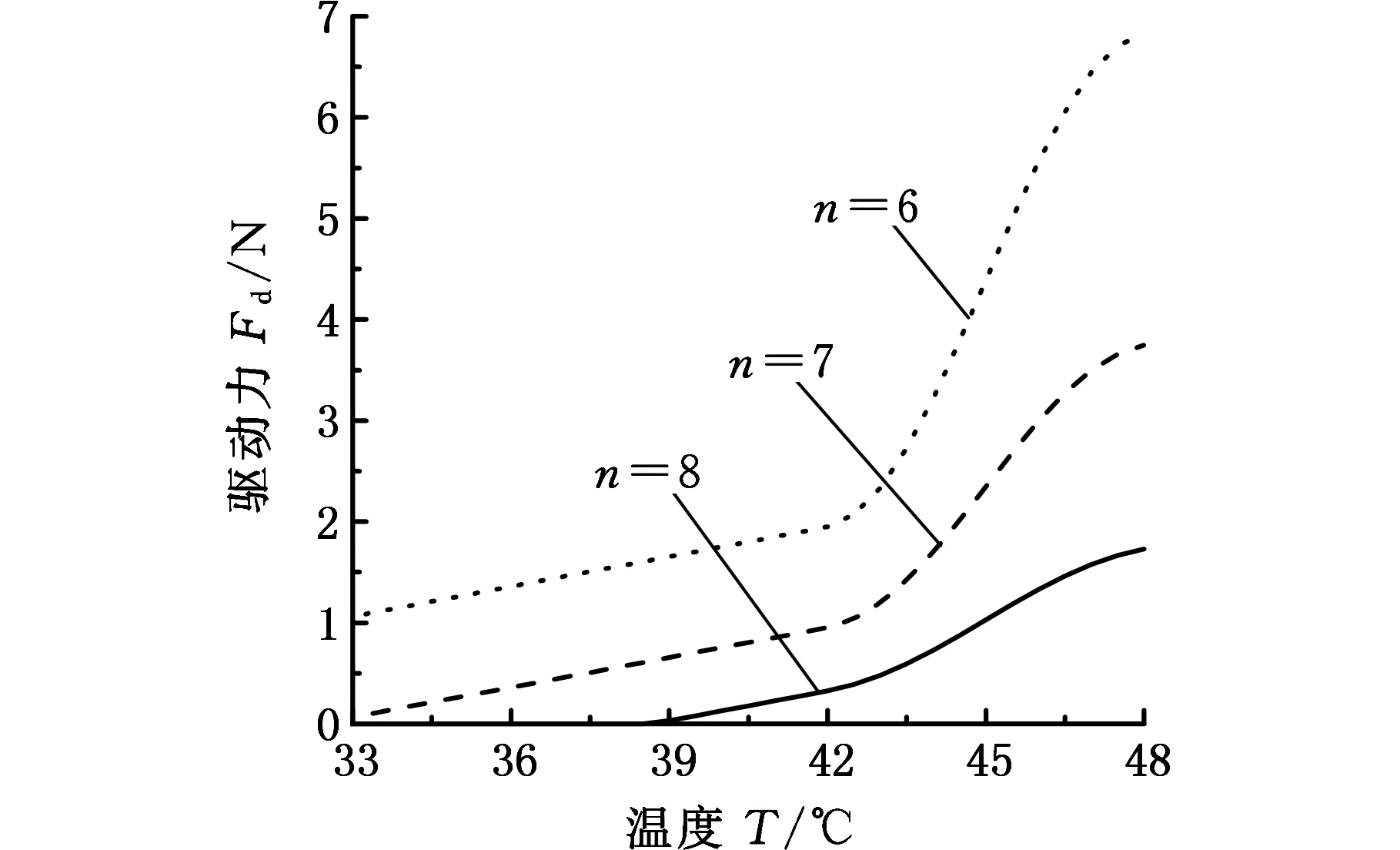
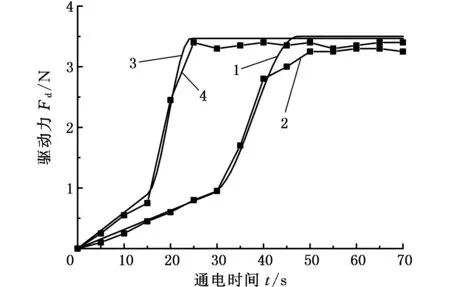
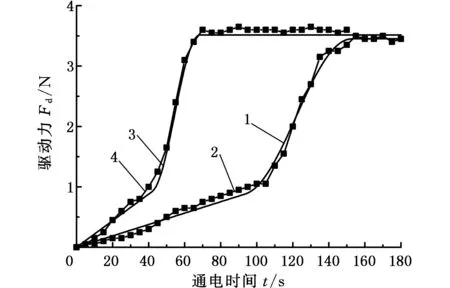
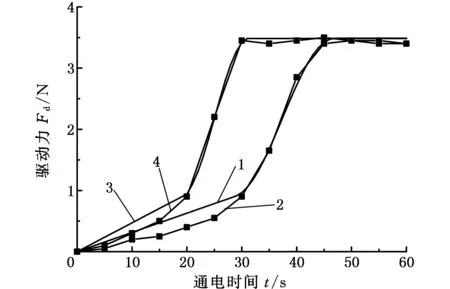
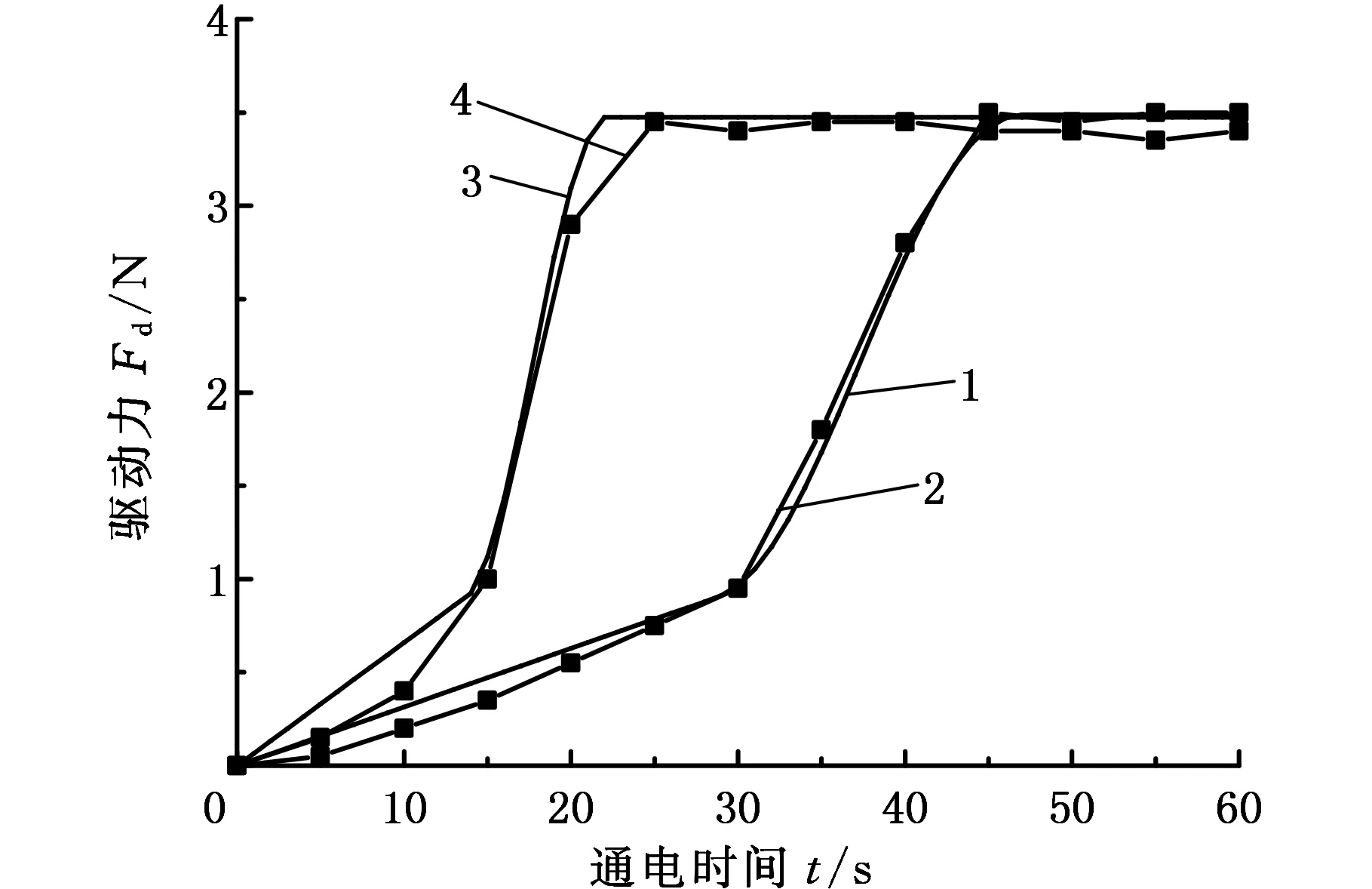
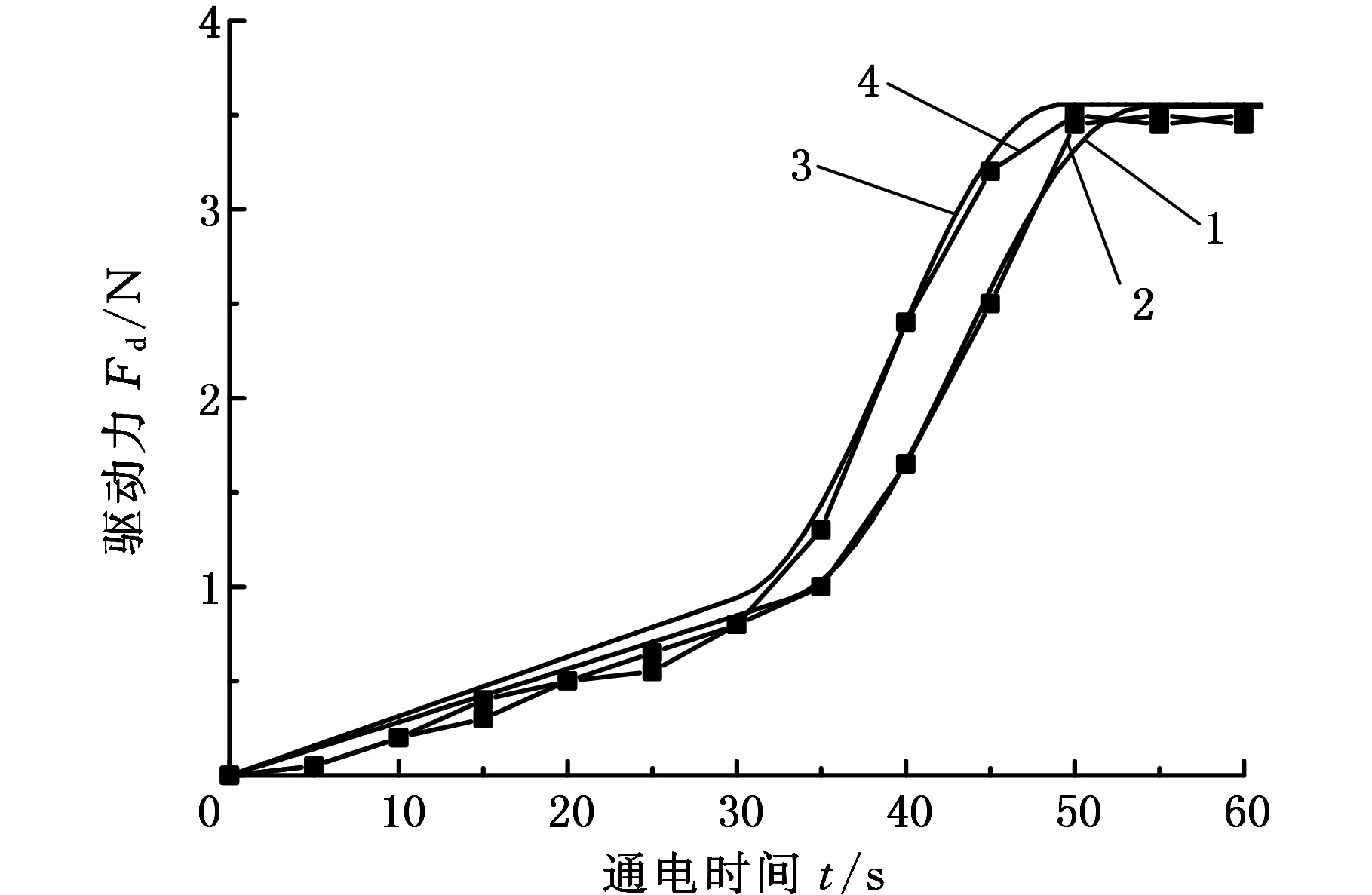
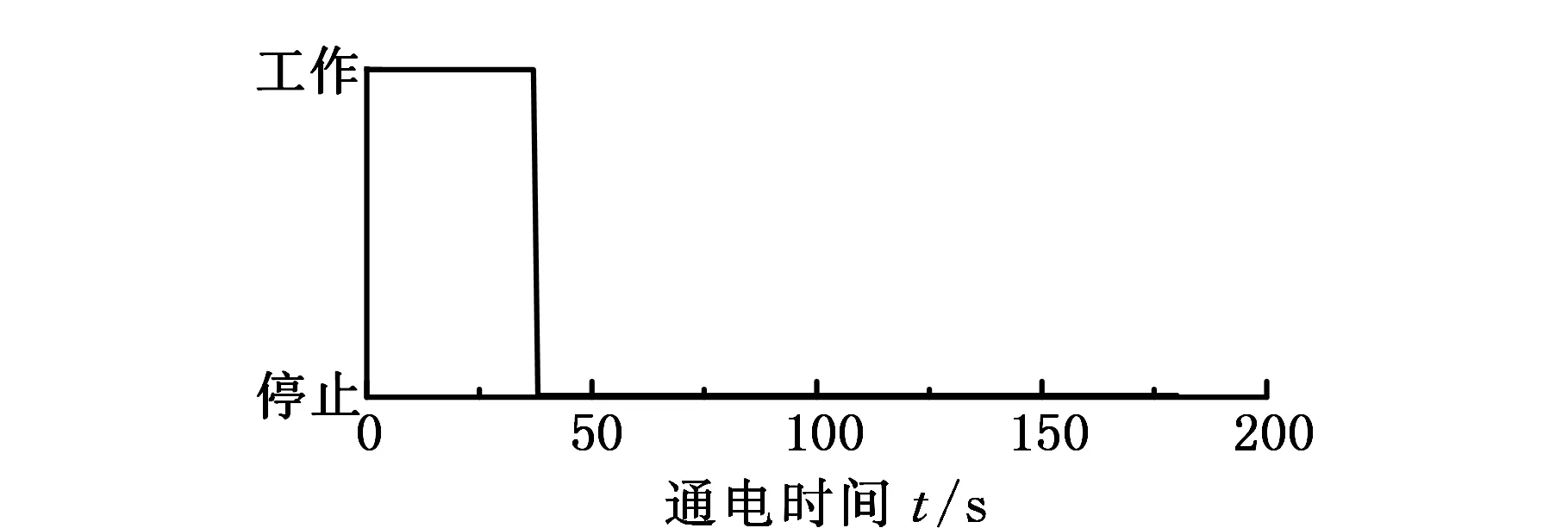
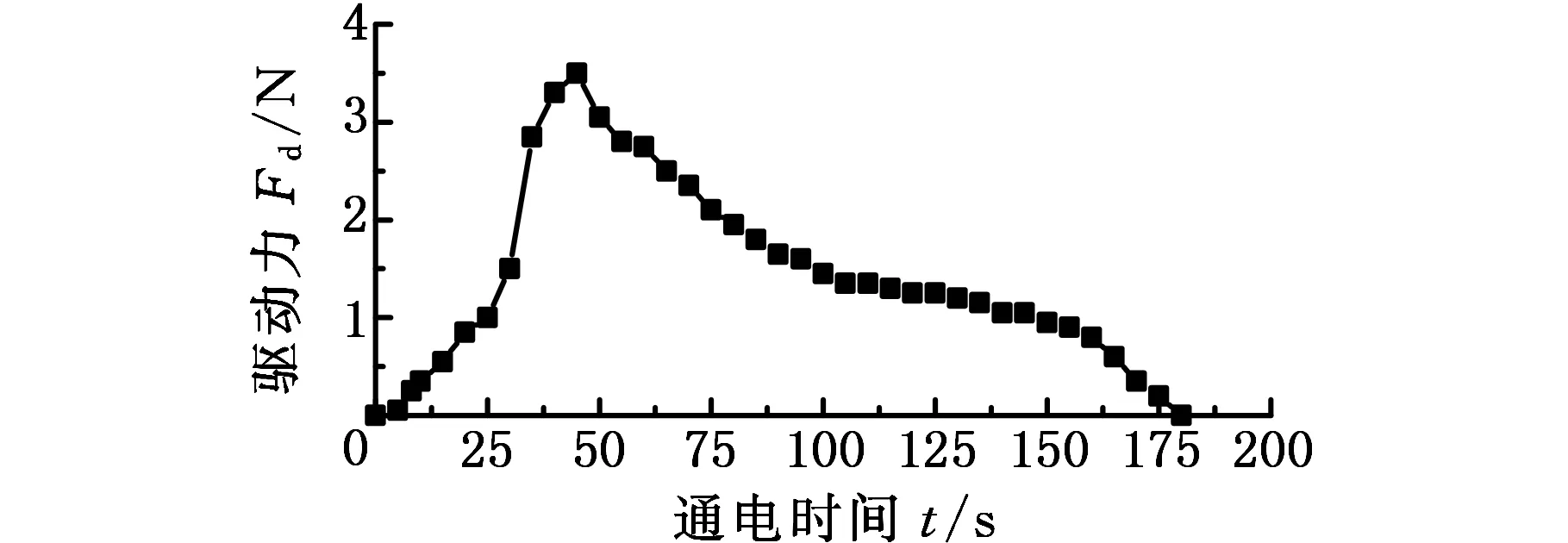
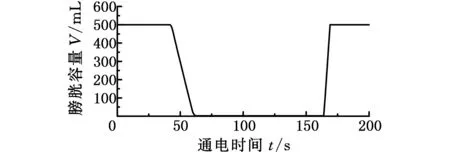
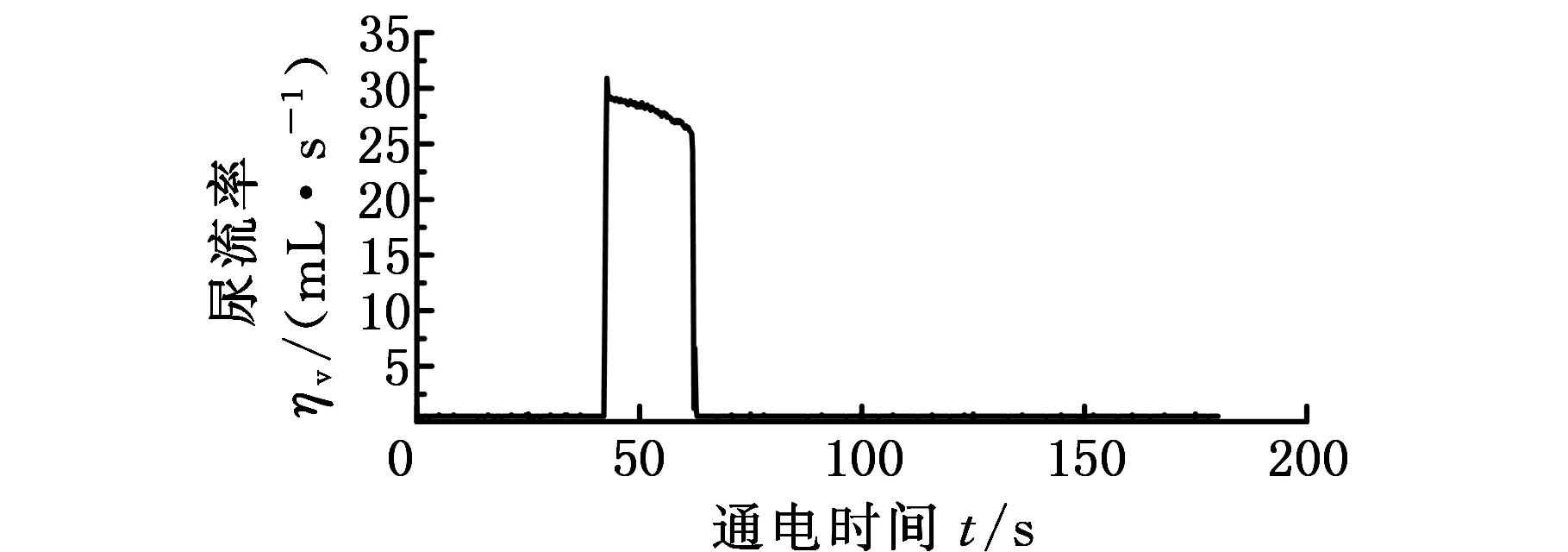
根據尿道的生理結構,磁吸力過大將損傷尿道,過小又起不到密閉作用,因此,本研究參考文獻[11],選取最大磁吸力Fmmax=3.2 N、最小磁吸力Fmmin=0.45 N作為尿道閥的啟閉條件和SMA彈簧的靜態設計依據。即:Fd>Fmmax時,閥芯移動,尿道開啟,膀胱開始排尿;Fd>Fmmin時,膀胱保持排尿;Fd SMA彈簧如圖3所示。在SMA本構模型建立中,Brinson模型是應用最廣的[12]。本文基于Brinson模型,引入剪切彈性模量的計算公式[13],建立SMA彈簧的力學模型。 圖3 SMA彈簧回復變形示意圖Fig.3 Schematicdiagram of SMA spring recovery deformation 剪切模量G與溫度T之間的關系式為 (2) 式中,GM為馬氏體狀態下剪切彈性模量;GA為奧氏體狀態下剪切彈性模量;TAs為奧氏體轉變開始溫度;TAf為奧氏體轉變結束溫度;EA為奧氏體狀態下拉伸彈性模量;EM為馬氏體狀態下拉伸彈性模量;μ為泊松比。 在加熱過程中,進行奧氏體相變時剪切彈性模量G可用以下公式近似表示: (3) 基于Brinson提出的一維本構模型,引入塑性力學中的等效應力和等效應變以及剪切彈性模量和楊氏模量的關系,得 (4) 式中,下標0表示初始狀態;τ為剪應力;γ為剪應變;ξ為馬氏體的體積分數;γL為最大剪切殘余應變;ξS為應力誘發的馬氏體體積分數;Θ(ξ)為熱彈性模量。 由螺旋彈簧的設計理論知[14]: (5) 式中,F為彈簧所受的力;k為應力修正系數;D1為彈簧中徑;d1為彈簧線徑。 彈簧的形變量與剪切應變的關系為 (6) 式中,n為彈簧匝數。 聯立式(4)~式(6)可得到SMA彈簧的力學模型: (7) 根據熱力學原理,SMA彈簧的電流、溫度和通電時間關系為[15] (8) 式中,I為電流;h為熱傳輸系數;A為彈簧與環境接觸面積;m為彈簧質量;c為SMA彈簧的熱容量;t為通電時間。 熱傳輸系數與SMA彈簧的材料特性、受力、實驗條件等有關,可以通過實驗測得時間進而計算得到熱傳輸系數。在冷卻過程中,根據熱力學原理,熱傳輸系數 (9) 式中,Tms為冷卻過程中相變開始溫度;Tmf為冷卻過程中相變結束溫度;t為從Tms冷卻到Tmf的時間。 圖4為LC串聯諧振電路模型,其中R1為激勵源內阻,RL為負載電阻(電路匹配電阻和SMA彈簧電阻之和);L1、L2分別為發射和接收線圈的等效電感;C1、C2分別為發射和接收線圈的串聯電容;R2、R3為線圈損耗(包括趨膚效應、渦流損耗等)等效電阻;M為線圈之間的互感。 圖4 無線電能傳輸系統簡化電路Fig.4 Simplifiedcircuit for wireless energy transmission system 設流過發射和接收線圈的電流分別是I1、I2,方向如圖4所示。若無線供電系統的角頻率為ω,則兩線圈自阻抗分別為 (10) (11) 根據基爾霍夫電壓定律,可列出信號源電壓US的矩陣方程: (12) 解得關系式: (13) 串聯諧振耦合時,電路的阻抗呈現純電阻,阻抗值達到最小值,線圈中的電流最大,因此傳輸功率最大,效率最高。 高頻下的線圈損耗主要包括發熱損耗電阻R0和輻射損耗電阻Rr[16]: (14) (15) 式中,μ0為真空磁導率;d2為導線直徑;D2為線圈直徑;N為線圈匝數;σ為電導率;l為導線長度;ε0為空氣介電常數;h1為線圈寬度;c1為光速。 當調節信號源頻率范圍為2.5~30 MHz時,有Rr≤R0[16],即可忽略輻射損耗,即R2=R3≈R0。中等距離的諧振耦合時,兩線圈參數一致,以保證具有相同的自諧振頻率,有L1=L2,C1=C2,發射系統和接收系統的電路結構保持對稱,所以有ZS=R1+R0,ZL=RL+R0。它們的互感M計算公式為[17] (16) 聯立式(7)~式(9)和式(13)~式(16),可建立尿道閥的驅動力數學模型。可以看出,影響驅動力的因素主要有SMA彈簧線徑、中徑和匝數等結構參數以及信號源電壓的幅值、頻率等控制參數和線圈直徑、線徑、匝數等結構參數。 為了研究尿道閥的驅動特性,本文利用上述理論模型和搭建的尿道閥模擬實驗系統進行了仿真與實驗研究。如圖5所示,實驗系統主要由信號發生器、初級和輸出級功率放大器、電磁發射和接收線圈、尿道閥、示波器、數字功率計、模擬膀胱、壓力傳感器、測力計、模擬尿道、量杯、流量計、數據采集卡和計算機組成。根據文獻[18]中SMA彈簧元件的設計方法,對本研究中驅動元件SMA彈簧進行了計算設計,并由沈陽天賀新材料開發有限公司定制完成。主要儀器參數如表1所示。 1.信號發生器 2.功率放大器 3.發射、接收線圈 4.尿道閥 5.示波器 6.數字功率計 7.模擬膀胱 8.壓力傳感器 9.測力計 10.模擬尿道 11.量杯 12.計算機圖5 尿道閥模擬實驗系統組成Fig.5 Urethralvalve simulation experiment system 表1 主要儀器參數 電磁發射、接收線圈由參數相同的銅線繞制而成,均串聯相同的電容構成LC串聯諧振電路。輸出級功率放大器的輸出端采用變壓器進行匹配負載。依據SMA彈簧的供電要求和輸出級功放的輸出范圍,變壓器采用2∶5的匝數比使輸出阻抗為20 Ω,匹配負載由兩個50 Ω高頻電阻并聯組成。 本研究中,尿道閥的驅動特性是指開啟尿道閥的能力,啟閉特性是指按啟閉條件開啟和閉合的性能。本文以驅動力及其變化率和泄漏量分別作為評價尿道閥驅動特性和啟閉特性的指標。在調節實驗參數時,為使傳輸效率最大,兩線圈參數始終保持一致。 依據建立的尿道閥驅動力數學模型,本文仿真分析了彈簧中徑D1、線徑d1和匝數n對驅動力的影響規律。仿真參數[19]如表2所示。 表2 仿真計算參數Tab.2 Simulation Parameters 圖6為不同SMA彈簧線徑下驅動力隨溫度變化的仿真曲線。仿真時,d1分別取0.8 mm、1.0 mm、1.2 mm。可以看出:驅動力達到Fmmax(Fmmax=3.2 N)時,所需溫度分別為47 ℃、44.5 ℃、43 ℃。增大彈簧線徑,可增大驅動力,縮短尿道閥開啟的時間。 圖6 彈簧線徑對驅動力影響的仿真曲線Fig.6 Simulation curve of the effect of the spring wire diameter on driving force 圖7為不同SMA彈簧中徑下驅動力隨溫度變化的仿真曲線。仿真時,D1分別取3 mm、4 mm、5 mm。可以看出:驅動力達到Fmmax時,所需溫度分別為36 ℃、43 ℃、47 ℃。減小彈簧中徑,可增大驅動力,縮短尿道閥開啟的時間。 圖7 彈簧中徑對驅動力影響的仿真曲線Fig.7 Simulation curve of the effect of the spring pitch diameter on driving force 圖8為不同SMA彈簧匝數下驅動力隨溫度變化的仿真曲線。仿真時,n分別取6、7、8。可以看出:驅動力達到Fmmax時,匝數6和7所需溫度分別為44.5 ℃和47 ℃,而n=8時在溫度范圍內無法達到Fmmax。減少彈簧匝數,可增大驅動力,縮短尿道閥開啟的時間。 圖8 彈簧匝數對驅動力影響的仿真曲線Fig.8 Simulation curve of the effect of the number of spring turns on driving force 根據上述仿真分析,本文選取D1=5 mm、d1=0.8 mm和n=7的彈簧作為研究對象,對無線供電系統的控制參數和線圈結構參數對尿道閥的驅動特性影響進行實驗研究。 圖9為不同信號源頻率下,驅動力隨通電時間變化的仿真和實驗曲線。實驗條件為:D2=80 mm,d2=0.8 mm,N=10,C2=39 pF,f=1/ω,L=3 cm,信號源電壓峰-峰值VP-P=30 V,線圈自諧振頻率為6.81 MHz。可以看出,當信號源頻率接近線圈自諧振頻率時,兩線圈產生諧振,驅動力迅速增大,尿道閥響應快。 1.f=5 MHz仿真曲線 2.f=5 MHz實驗曲線 3.f=7 MHz仿真曲線 4.f=7 MHz實驗曲線圖9 信號源頻率對驅動力影響仿真和實驗曲線Fig.9 Simulation andexperimental curve of the effect of the frequency of signal source on driving force 圖10為不同信號源電壓峰-峰值VP-P下,驅動力隨通電時間變化的仿真和實驗曲線。實驗條件為:D2=100 mm,d2=1 mm,N=10,C2=51 pF,L=3 cm,信號源頻率為線圈自諧振頻率5.32 MHz。可以看出,增大信號源電壓,可迅速增大驅動力,縮短尿道閥開啟時間。 1.VP-P=20 V仿真曲線 2.VP-P=20 V實驗曲線 3.VP-P=30 V仿真曲線 4.VP-P=30 V實驗曲線圖10 信號源電壓峰-峰值對驅動力影響仿真和實驗曲線Fig.10 Simulation and experimental curve of the effect of the peak-peak of signal source on driving force 1.D2=80 mm仿真曲線 2.D2=80 mm實驗曲線 3.D2=100 mm仿真曲線 4.D2=100 mm實驗曲線圖11 線圈直徑對驅動力影響仿真和實驗曲線Fig.11 Simulation and experimental curve of the effect of the coil diameter on driving force 圖11為不同線圈直徑下,驅動力隨通電時間變化的仿真和實驗曲線。實驗條件為:D2=80,100 mm,d2=0.8 mm,N=10,C2=51 pF,L=3 cm,VP-P=30 V。可以看出,線圈直徑越大,驅動力增大越快,尿道閥響應越快。 圖12為不同線徑下,驅動力隨通電時間變化的仿真和實驗曲線。實驗條件為:d2=0.8,1.0 mm,D2=80 mm,N=10,C2=51 pF,L=3 cm,VP-P=30 V。可以看出,線圈線徑越大,驅動力增大越快,尿道閥響應越快。 1.d2=0.8 mm仿真曲線 2.d2=0.8 mm實驗曲線 3.d2=1.0 mm仿真曲線 4.d2=1.0 mm實驗曲線圖12 線徑對驅動力影響仿真和實驗曲線Fig.12 Simulation and experimental curve of the effect of the coil wire diameter on driving force 圖13為不同匝數下,驅動力隨通電時間變化的仿真和實驗曲線。實驗條件為:N=6,10,D2=80 mm,d2=0.8 mm,C2=51 pF,L=3 cm,VP-P=30 V。可以看出,線圈匝數越多,驅動力增大越快,尿道閥響應越快。 1.N=6仿真曲線 2.N=6實驗曲線 3.N=10仿真曲線 4.N=10實驗曲線圖13 匝數對驅動力影響仿真和實驗曲線Fig.13 Simulation and experimental curve of the effect of the number of coil turns on driving force 圖14 驅動力與磁吸力對比曲線Fig.14 Comparisoncurve of driving force and magnetic attraction 圖14為閥芯的驅動力和磁吸力與閥芯位移關系曲線,磁吸力根據文獻[11]計算得出。可以看出:驅動力隨位移增大而增大,而磁吸力隨位移增大而變小,但二者差值隨位移增大而增大,表明SMA彈簧能使尿道開啟。 圖15為尿道閥的啟閉特性實驗曲線。實驗條件為:D2=80 mm,d2=0.8 mm,N=10,C2=51 pF,L=3 cm,VP-P=30 V,信號源頻率為線圈自諧振頻率5.96 MHz。在此條件下,接收線圈電流能達到1.75 A,發射線圈上的電流為3.5 A,線圈之間傳輸效率為50%。可以看出,電路接通后,負載電路接收電能并迅速產生熱能,SMA彈簧變形驅動力增大,但由于驅動力小于Fmmax,尿道閥始終保持閉合狀態,尿流率ηv為0;當驅動力達到Fmmax時,尿道閥開啟尿道,尿流率ηv迅速達到最大值,尿液連續排出,直至尿流率ηv降為0。電路斷開后,SMA彈簧溫度逐漸下降,驅動力也隨之減小。當驅動力小于Fmmin時,再次向模擬膀胱注入500 mL水,檢測尿流率保持為0,泄漏量為0。實驗表明,該尿道閥能按啟閉條件開啟和閉合尿道。 (a)電路工作狀態 (b)驅動力隨通電時間變化曲線 (c)模擬膀胱容量隨通電時間變化曲線 (d)尿流率隨通電時間變化曲線圖15 尿道閥的啟閉特性實驗曲線Fig.15 Experimental curve of opening/closing performance (1)增大彈簧線徑,減小中徑和匝數均可提高驅動特性。 (2)當信號源頻率與線圈自諧振頻率接近時,可獲得較好的驅動效果;增大信號源電壓、線圈直徑、線圈線徑和增加線圈匝數,均能提高尿道閥的驅動特性。 (3)尿道閥的啟閉特性良好。尿道閥原理可行,數學模型有效,可為尿道閥的特性分析與結構優化設計提供參考。進一步將對尿道閥的工作可靠性展開研究。 [1] 馮寧翰. 百科名醫疾病詞條: 尿失禁[EB/OL].[2016-09-18] http://www. baikemy. com/disease/detail/5539/1. FENG Ninghan. Baikemy Disease Entry: Urinary Incontinence[EB/OL].http://www.baikemy.com/disease/detail/5539/1. [2] 國際尿控學會. 國際尿控學標準化指南[M]. 關志忱, 譯. 北京: 人民衛生出版社,2011:2-23. International Continence Society. International Continence Society Standardization Guideline[M]. GUAN Zhichen, trans. Beijing: People’s Medical Publishing House,2011:2-23. [3] AHMED S, MARCUS J D, HASHIM. The Medical Management of Urinary Incontinence[J]. Autonomic Neuroscience: Basic and Clinical,2010,152(1/2):4-10. [4] CHONAN S, JIANG Z W, TANAKA M, et al. Development of an Artificial Urethral Valve Using SMA Actuators[J]. Smart Materials and Structures,1997,6(4):410-414. [5] CHONAN S, JIANG Z W, TANAKA M, et al. Artificial Urethral Valve Using SMA Actuators (Verification of Opening/Closing Functions and Thermometall Urgicalmechanical Model of SMA Actuators)[J]. International Journal of Applied Electromagnetics and Mechanics,1999,10(1):45-62. [6] TANAKA M, HIRANO K, GOTO H, et al. Artificial SMA Valve for Treatment of Urinary Incontinence: Upgrading of Valve and Introduction of Transcutaneous Transformer[J]. Biomedical Materials and Engineering,1999,9(2):97-112. [7] TANAKA M, GOTO H, NAMIMA T, et al. Development of Artificial Urethra Valve with Transcutaneous Energy Transformer[J]. International Journal of Applied Electromagnetics and Mechanics,2000,12(1/2):79-85. [8] TANAKA M, ABE K, WANG F, et al. Artificial Urethra Valve Driven by SMA Actuators with Transcutaneous Energy Transmission System[J]. International Journal of Applied Electromagnetics and Mechanics,2003,18(1/3):23-30. [9] 柳春寶, 李笑, 關婷. 膀胱動力泵尿道閥的設計及實驗研究[J]. 中國機械工程,2012,23(17):2084-2087. LIU Chunbao, LI Xiao, GUAN Ting. Design and Experimental Research for Urethra Valve of Bladder Power Pump [J]. China Mechanical Engineering,2012,23(17):2084-2087. [10] 周懷洲. 超聲汽化蒸汽驅動的排尿助力系統建模與實驗研究[D]. 廣州: 廣東工業大學,2013. ZHOU Huaizhou. Modeling and Experimental Research of Urination Assist System Driven by Ultrasonicvaporized Steam[D]. Guangzhou: Guangdong University of Technology,2013. [11] 胡振, 李笑, 關婷. 超聲汽化蒸汽驅動的尿道閥的仿真與實驗研究[J]. 中國機械工程,2015,26(13):1789-1793. HU Zhen, LI Xiao, GUAN Ting. Simulation and Experiments for Urethral Valve Driven by Ultrasonicvaporized Steam[J]. China Mechanical Eng-ineering,2015,26(13):1789-1793. [12] 舟久保熙康.形狀記憶合金[M]. 北京:機械工業出版社,1992:1-93. HIROYASU F. Shape Memory Alloys[M]. Beijing: China Machine Press,1992:1-93. [13] 劉愛榮, 潘亦蘇, 周本寬. 形狀記憶合金彈簧變形分析及其在振動控制中的應用[J]. 西南交通大學學報,2000,35(6):80-85. LIU Airong, PAN Yisu, ZHOU Benkuan. Deformation Analysis of SMA Springs and Its Application to Vibration Control[J]. Journal of Southwest Jiaotong University,2000,35(6):80-85. [14] 成大先. 機械設計手冊單行本: 彈簧[M]. 北京:化學工業出版社,2004. CHENG Daxian. Mechanical Design Manual: Spring[M]. Beijing: Chemical Industry Publisher,2004. [15] LEUVEN K U. Design Aspects of Shape Memory Actuators[J]. Mechatronics,1998,8:635-656. [17] GROVER F W. Inductance Calculations[M]. New York: Courier Dover Publication,2004:88-93. [18] 徐根應, 汪明樸. 形狀記憶合金彈簧元件的設計方法[J]. 機械工程材料,1997(4):49-51. XU Genying, WANG Mingpu. Design Method for Shape Memory Spring[J]. Materials for Mechanical Engineering,1997(4):49-51. [19] 劉玉璽. 形狀記憶合金驅動器的設計與實驗分析[D]. 重慶: 重慶理工大學,2011. LIU Yuxi. Experimental Analysis and Design of Shape Memory Alloy Actuator[D]. Chongqing: Chongqing University of Technology,2011. (編輯袁興玲) ResearchonDrivingPerformancesofUrethraValveDrivenbySMABasedonWirelessPowerSupply ZHANG Ran1LI Xiao1CAO Rui1GUAN Ting2 1.School of Electromechanical Engineering, Guangdong University of Technology, Guangzhou, 5100062.Guangzhou General Hospital of Guangzhou Military Command,Guangzhou,510010 TH137;R318.6 10.3969/j.issn.1004-132X.2017.19.003 2016-09-18 國家自然科學基金資助項目(50775040);廣東省自然科學基金資助項目(2017A030313265) 張燃,男,1992年生。廣東工業大學機電工程學院碩士研究生。研究方向為機電液智能控制與應用、生物醫學器械。李笑,男,1962年生。廣東工業大學機電工程學院教授、博士研究生導師。曹睿,男,1994年生。廣東工業大學機電工程學院碩士研究生。關婷,女,1962年生。廣州軍區廣州總醫院主任醫師。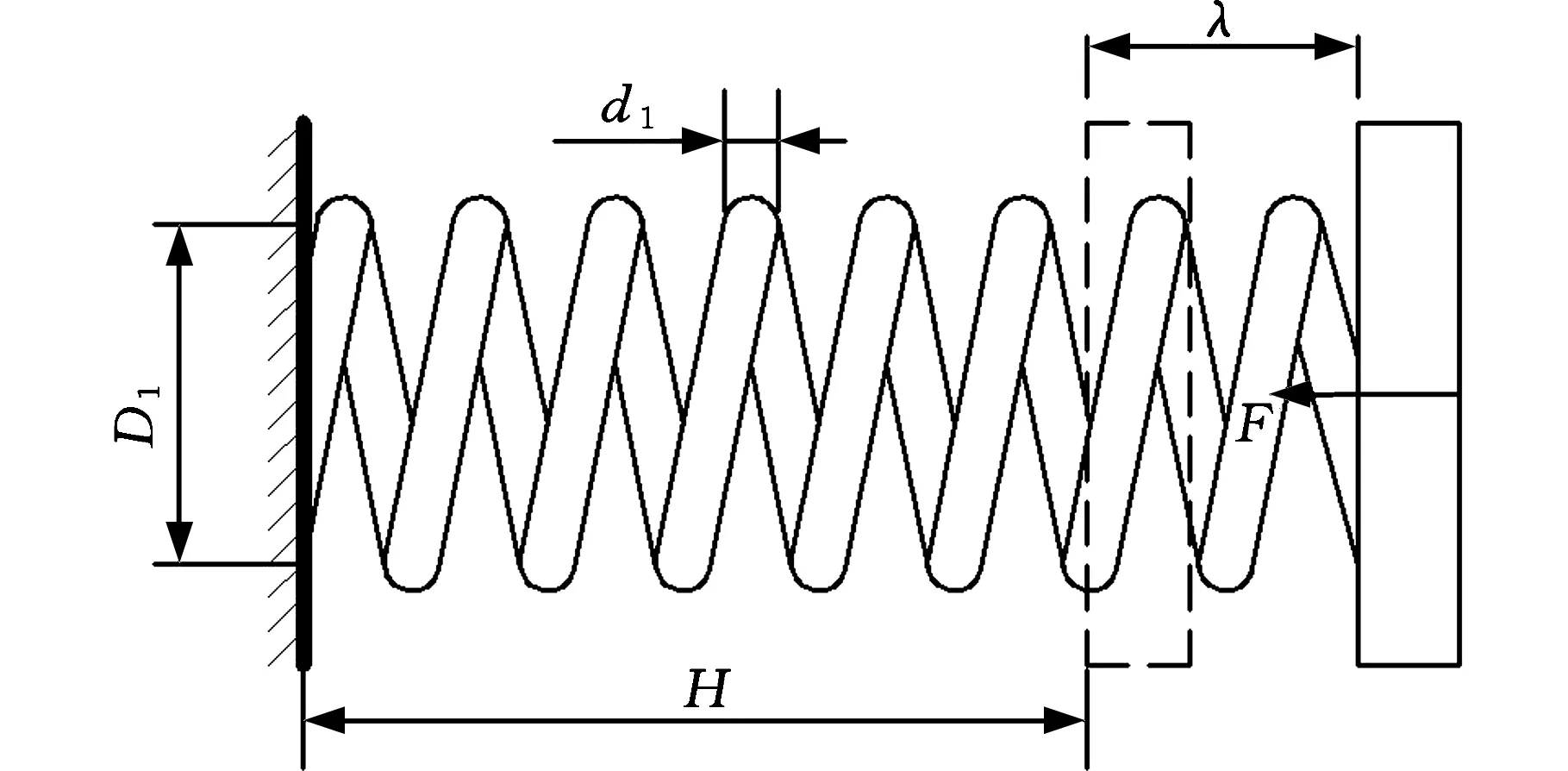






3 無線電能傳輸耦合模型



4 尿道閥驅動特性研究
4.1 彈簧結構參數對驅動力的影響
4.2 控制參數對尿道閥驅動特性的影響
4.3 線圈結構參數對尿道閥驅動特性的影響
4.4 尿道閥啟閉特性
5 結論
猜你喜歡
作文·小學低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學低年級(2024年2期)2024-04-29 00:00:00
作文·小學低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55