溢油回收船PMS&IAS集成系統(tǒng)設計
2017-10-13 05:19:17李進科
船電技術 2017年6期
李進科,邵 赟,胡 舜
?
溢油回收船PMS&IAS集成系統(tǒng)設計
李進科,邵 赟,胡 舜
(武漢武船船舶設計有限公司,武漢 430060)
本文介紹了萬噸溢油回收船電力推進系統(tǒng)的組成及特點,在簡要概述功率管理系統(tǒng)PMS及監(jiān)測報警系統(tǒng)IAS構架及功能的基礎上,針對溢油回收船的DP2、消防、溢油回收、正常航行及進出港多種復雜工況特點,設計了基于WINCC上位集成的一體化PMS&IAS系統(tǒng)。該系統(tǒng)在傳統(tǒng)功率管理系統(tǒng)的基礎上融入電站一體化集成監(jiān)控設計,一定程度上能實現(xiàn)船舶的遠程監(jiān)控和狀態(tài)檢修,在后期運營維護上提質增效、節(jié)約成本。
萬噸溢油船 PMS&IAS 一體化集成 DP2
0 引言
隨著國家海洋強國戰(zhàn)略的穩(wěn)步推進,海上石油運輸生命線的清潔與安全受到愈來愈多的關注和聚焦。萬噸級多功能溢油回收船作為國家發(fā)改委海洋工程裝備研發(fā)及產(chǎn)業(yè)化的重要專項研究內容,在未來承擔著近海主要航道清理維護及溢油回收的重要任務。在大力提倡綠色、環(huán)保的當下,電推系統(tǒng)低功耗、高能效的特點[1]受到了越來越多的青睞和推崇。
本文在介紹溢油回收船電推系統(tǒng)組成的基礎上,為滿足DP2要求,設計了基于WINCC上位集成滿足功能要求的冗余一體化PMS&IAS系統(tǒng),詳細描述了該一體化集成系統(tǒng)的硬件架構、對外接口、界面設計及程序流程等內容。
1 系統(tǒng)組成
萬噸溢油回收船設有4臺2600 kW主發(fā)電機、1臺400 kW停泊發(fā)電機及1臺150 kW應急發(fā)電機組,由兩條主推進支路、兩條消防泵支路及兩條側推進支路組成。為了保證推進系統(tǒng)的獨立性和可操作性,兩條主推支路以及側推支路分別由四套相互獨立的電推控制系統(tǒng)單獨控制。
主推進支路由船舶電網(wǎng)通過690 V主配電板向3600 kVA主推進移相變壓器供電,移相變壓器帶動功率為3200 kW的12脈主推進變頻器,再由變頻器控制3000 kW主推進電機驅動全回轉舵槳的正常運行。
側推進支路由船舶電網(wǎng)通過690 V主配電板向1500 kVA側推進移相變壓器供電,移相變壓器帶動功率為1400 kW的12脈側推進變頻器,再由變頻器控制1300 kW側推電機驅動推進器的正常運行。消防支路由690 V電網(wǎng)直接驅動6脈1400 kW消防泵變頻器帶1200 kW消防泵電動機運行。
2 系統(tǒng)硬件設計
2.1 PMS功能
PMS對電能進行統(tǒng)一的調度和管理,是綜合電力推進系統(tǒng)的核心控制模塊,具有對溢油回收船電站的各種控制及保護功能。IAS系統(tǒng)主要實現(xiàn)對全系統(tǒng)各運行數(shù)據(jù)的采集分析和監(jiān)視功能,當發(fā)生各類報警及運行故障時為決策者提供診斷判據(jù),以便采取適當?shù)奶幹么胧?/p>
具體而言,PMS系統(tǒng)會依據(jù)全船電網(wǎng)的實時功率需求實現(xiàn)動態(tài)增減機,調節(jié)各臺主發(fā)電機組間的負荷分配,實現(xiàn)主推變頻器、船舶電站及DP系統(tǒng)間的協(xié)調運行[2-3],并對整個推進操控系統(tǒng)實時監(jiān)控。當供電系統(tǒng)運行時發(fā)生各類故障報警時,PMS系統(tǒng)能自動監(jiān)測并處理,采取系列措施保證對負載供電的連續(xù)性和電站安全性,為全電網(wǎng)的主側推支路、消防泵支路及其他用電負荷提供高品質、配置優(yōu)化的可靠電源。
PMS系統(tǒng)的主要功能[4]如下:
1) 系統(tǒng)自檢功能
PMS在上電后的起動過程中對軟、硬件工作狀態(tài)進行自檢,屏幕會顯示出系統(tǒng)自身故障的報警信息,自檢通過即可操作。
2) 工作模式選擇
PMS具有DP2模式、消防工況、溢油回收、進出港及航行等多種模式。DP2模式下,主配電板自動分區(qū)供電以確保冗余可靠性;進出口模式下,電站只增加機組,不解列機組;正常航行模式下,按照功率關系正常增減機。
3) 機組的手動自動起停
當PMS觸摸屏面板調至手動模式時,可直接手動操作發(fā)電機組的起動和停止;當PMS觸摸屏面板調至自動模式時,程序監(jiān)測在網(wǎng)機組功率達到設定的閾值后經(jīng)過一段設定延時后自動起動備用機組或解列在網(wǎng)機組。
4) 機組優(yōu)先級選擇
PMS系統(tǒng)可在HMI觸摸屏上設置各柴油機組的起停順序,并能在線更改各機組的優(yōu)先級次序。
5) 機組的自同步、解列及增減機
PMS需依據(jù)全船總用電負荷的不同實時調整機組出力,機組的在網(wǎng)數(shù)量應隨負荷大小自動調整。當用電負荷增加到一定閾值時,PMS自動實現(xiàn)備用機組的起動,在電網(wǎng)和頻率達到要求值后立即并車;當用電負荷降低到設定閾值時,PMS自動將在網(wǎng)機組解列和停車。
6) 重負荷起動問詢
當有功率較大的負載需要起動時,首先會向PMS發(fā)出詢問申請,PMS即刻檢視全網(wǎng)的剩余可用功率,只有當在網(wǎng)可用功率大于該負載所需功率時PMS才會發(fā)出允許信號,當可用功率不滿足所需時閉鎖其起動,同時起動備用機組以滿足該負載的起動條件。
7) 自動分級卸載
類似于機組優(yōu)先級選擇,該功能根據(jù)負載的重要性高低將其分級。當起動重負荷全網(wǎng)可用功率不足或機組故障時,PMS自動卸載非重要負荷,對全網(wǎng)進行功率限制,確保主推進系統(tǒng)的運轉。
8) 功率限制
PMS實時監(jiān)測在網(wǎng)功率和機組負荷率,當在網(wǎng)功率不足以維持推進和日用負荷時,向推進變頻器發(fā)出功率限制信號以限制推進功率的增加,防止負荷突變導致機組過載,進而引發(fā)全船停電安全事故。
基于以上的功能設計,溢油回收船PMS程序控制流程如圖1所示。
2.2 PMS硬件設計
溢油回收船正常工作狀態(tài)下需滿足DP2(動力定位)、消防、溢油回收、正常航行、進出港以及停泊等多種復雜工況需求,DP2指具備動力定位系統(tǒng)的船舶,在任何單一故障發(fā)生后不影響其他設備及系統(tǒng)的運行,仍能保持船舶的位置和首向,因此對PMS設計提出了較高要求。
為此,本船PMS采用多級獨立雙冗余設計:以PLC控制器(采用西門子公司PLC及輔件)作為主站,為4臺主發(fā)機組及應急機組配備獨立的保護并車單元(采用DEIF公司PPU3)作為從站。
上層通訊方式為冗余PROFIBUS網(wǎng)絡,采用兩套獨立運行互為備用的S7-400H熱冗余控制器,兩套S7-400H間通過光纖同步通信。當一臺S7-400H作為主站發(fā)揮控制功能時另一臺處備用狀態(tài),主用S7-400H如若發(fā)生故障,備用S7-400將在100ms內自動切換為主控器投入使用,確保系統(tǒng)的不間斷運行。上層PROFIBUS通過Y-link與PPU3實現(xiàn)通信連接,當在網(wǎng)機組出現(xiàn)高低壓、溫升超限、高低頻、油壓低等故障時,PPU控制相應機組自動脫扣,不影響全船電網(wǎng)的正常運行。該設計架構能有效保證船舶在極端條件下系統(tǒng)的安全穩(wěn)定運行。
母聯(lián)開關配備的同步模塊能為其提供同步分合閘等控制。需執(zhí)行DP2、消防及溢油回收操作時,按下相應模式選擇開關,電站能在PMS管理下實現(xiàn)母排的自動分段和負荷分區(qū),滿足上述各工況的切換操作要求,PMS架構如圖2所示。
2.3 IAS硬件設計
監(jiān)控系統(tǒng)IAS是溢油回收船的重要構成部分,負責全船的發(fā)電、供電、推進控制、檢測和報警。本船IAS系統(tǒng)硬件設備由集控臺、推進控制裝置、采集柜、應急車鐘以及工控機組成。

圖1 PMS系統(tǒng)工作流程圖
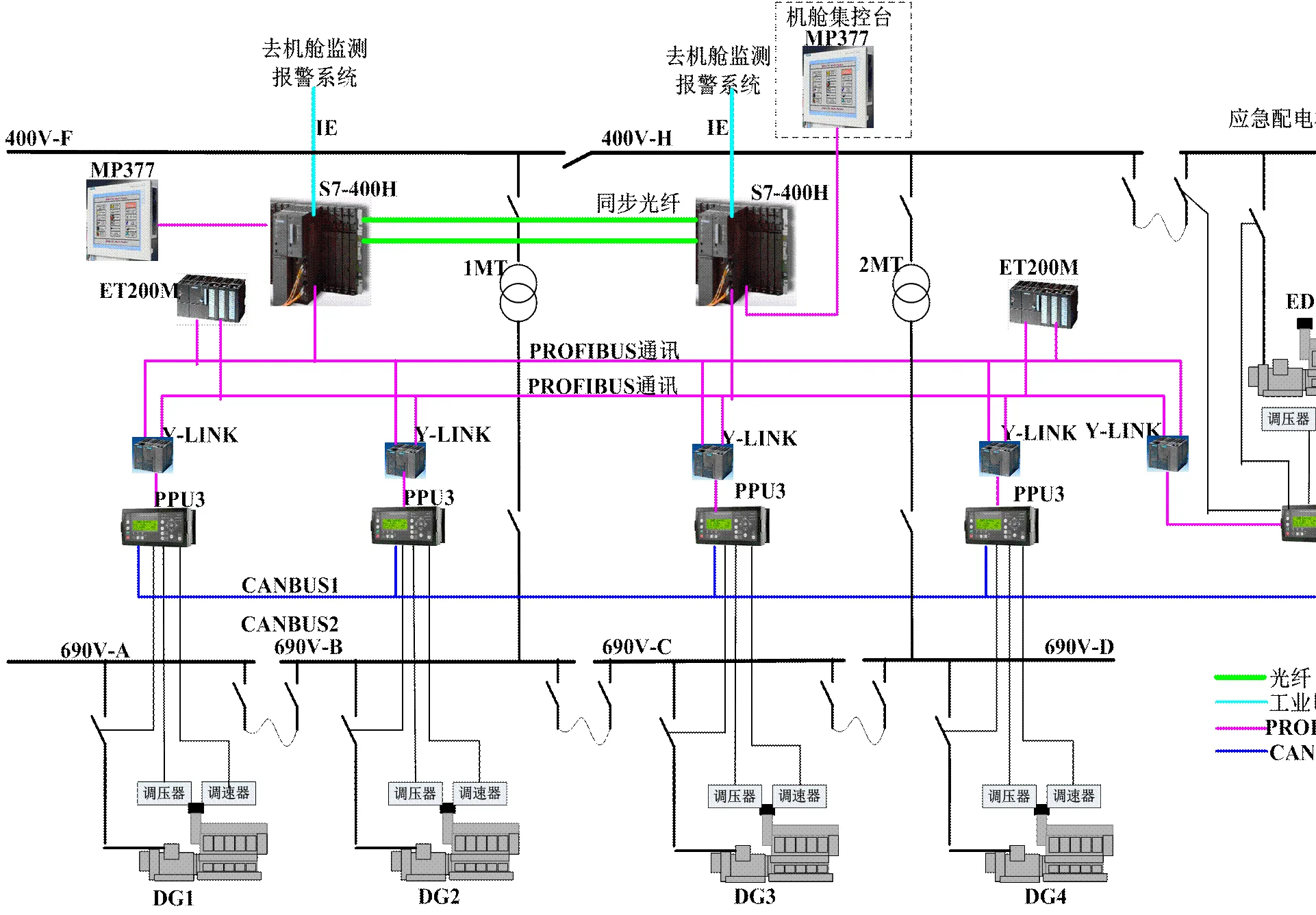
圖2 萬噸溢油船PMS系統(tǒng)結構圖
本船IAS系統(tǒng)采用基于網(wǎng)絡的分散式控制結構,硬件主要組成如下:
1)位于集控臺內的西門子S7-400主站一套,包含UR機架、CPU模塊、電源模塊、存儲卡及同步模塊;
2)位于配電板內的PMS、發(fā)電機組分布式子站ET200M4套(包括IM153冗余連接模塊、并車保護單元PPU3、DI/DO模塊以及OP觸摸屏);
3)位于駕控臺的推進控制子站;
4)位于應急配電板內的應急子站;
5)安裝于集控臺內的工控機系統(tǒng),包括工控機、顯示器、485通訊模塊以及打印機。
3 WINCC上位集成
3.1 程序結構
IAS監(jiān)控系統(tǒng)與PMS功率管理系統(tǒng)均為下位系統(tǒng),在硬件組態(tài)及構成上是完整獨立的兩套子系統(tǒng),下位系統(tǒng)的程序邏輯采用西門子的STEP7開發(fā)。溢油回收船PMS&IAS一體化集成主要體現(xiàn)在后臺上位系統(tǒng)的統(tǒng)一設計和一體集成,上位工控系統(tǒng)采用西門子WinCC7.2開發(fā),OP面板采用WinCC Flexible開發(fā),用于對整個PMS&IAS系統(tǒng)后臺數(shù)據(jù)的采集、監(jiān)測和實時報警反饋[5]。
3.2 接口設計
上位系統(tǒng)的接口主要包含PMS與外部設備信號接口以及PMS與IAS網(wǎng)絡通訊接口兩類:
PMS的外部設備接口對象主要有柴油發(fā)機組、690 V主配電板、DP設備、變頻器以及重載設備,具體接口內容如下:
柴油發(fā)機組:機組起動信號、停止信號、故障報警、遙控狀態(tài)、備妥反饋、升降速、急停等;
690 V主配電板:主開關狀態(tài)及分合閘操控、優(yōu)先脫扣、主發(fā)電機絕緣低報警、PMS模式切換選擇等;
變頻器:推進斷路器分合閘狀態(tài)、快速降負荷以及在網(wǎng)功率等信號;
PMS與IAS通訊接口主要包含如下狀態(tài)字:
1/2/3/4號發(fā)電機運行、遙控、備車、急停以及開關狀態(tài),各機組有功、無功、電流、電壓、效率,母線電壓、頻率,母聯(lián)斷路器開關狀態(tài),岸電開關狀態(tài),主/側推開關狀態(tài),主變原/副邊開關狀態(tài)以及航行工況、消防工況、進出港工況、溢油回收工況、DP2工況等狀態(tài)信息。
3.3 界面設計
該船上位工控機界面主要包含功率管理、電站監(jiān)測、機組報警、推進系統(tǒng)、歷史曲線、監(jiān)控網(wǎng)絡和報警信息七大功能。
功率管理界面顯示系統(tǒng)單線圖信息,各在網(wǎng)機組的實時功率、電流、電壓數(shù)據(jù)以及母聯(lián)、推進支路主開關的分合閘顯示;
電站監(jiān)測對四臺主發(fā)機組的狀態(tài)參量予以顯示監(jiān)測,具體為功率、電流、電壓、滑油溫度/壓力、繞組溫度等,如圖3所示。
機組報警界面收集匯總所有可能的故障報警條目,形成故障子集庫;
推進系統(tǒng)實時顯示推進支路主要部件的狀態(tài)參量:推進變壓器繞組溫度,推進變頻器輸出電流、功率、轉速,推進電機繞組及軸溫。
報警系統(tǒng)界面顯示所有監(jiān)測到的報警及故障條目,包含當前報警信息及歷史報警信息,精確顯示報警的時間和故障類型。當前報警會在主界面下方以醒目的紅色文字閃現(xiàn)提醒船員實時處理,在OP觸摸屏操作“消音”和“復位”后若故障消失,切換進入報警系統(tǒng)界面后信息文本變?yōu)榫G色成為歷史信息存儲;若故障未排除,信息文本變?yōu)樗{色提示繼續(xù)排查。界面如圖4所示。

圖3 電站監(jiān)測界面

圖4 報警系統(tǒng)界面
此外,還能通過船上信號收發(fā)臺與岸基信號收發(fā)臺的通訊聯(lián)絡,將船舶航行時的故障信息實時傳輸,供技術人員分析診斷提供遠程指導,一定程度上實現(xiàn)遠程監(jiān)控和狀態(tài)檢修,后期維護上達到節(jié)約成本的目的。
4 總結
采用電推系統(tǒng),環(huán)保優(yōu)勢明顯,能效利用率大大提高,本文闡述了溢油回收船核心控制系統(tǒng)PMS以及安監(jiān)系統(tǒng)IAS的硬件設計、系統(tǒng)結構和上位軟件的一體化集成設計,功能完善、自動化程度高。
[1] 俞文勝. 船舶綜合電力推進系統(tǒng)論述. 世界海運, 2007, 30(3): 43-45.
[2] 柯常國, 王勁, 楊俊飛. 電力推進船舶功率管理系統(tǒng)設計和研究. 船電技術, 2013, 30(9).
[3] 叢培亭. 船舶電站[M]. 北京:中國書籍出版社, 2007.
[4] 張奇, 金奎. 基于S7-400H的功率管理系統(tǒng)在海洋平臺中的應用. 船電技術, 2016, 36(8).
[5] 張均東, 閆慧琪, 余劍翔. 基于CAN總線的船舶監(jiān)控系統(tǒng)設計. 測控技術, 2003, 22(10).
Integrated System Design of PMS&IAS for the Oil Spilling Recovery Ship
Li Jinke, Shao Yun, Hu Shun
(Wuhan Shipbuilding Design Co., Ltd., Wuhan 430060, China)
U664.91
1003-4862(2017)06-0038-04
2017-03-13
李進科(1987-),男,工程師。研究方向:電子信息科學與技術。E-mail: 305964272@qq.com
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
防爆電機(2020年3期)2020-11-06 09:07:42
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
測控技術(2018年5期)2018-12-09 09:04:50
家庭影院技術(2017年9期)2017-09-26 03:41:45
電子制作(2017年7期)2017-06-05 09:36:13
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
