防護工程風管清掃機器人車載控制系統設計
2017-10-12 07:20:18茅靳豐劉立瑤侯普民鄧忠凱
網絡安全與數據管理 2017年18期
關鍵詞:單片機
茅靳豐,劉立瑤,張 虎,侯普民,鄧忠凱
(1. 解放軍理工大學 國防工程學院,江蘇 南京 210007; 2. 后勤工程學院,重慶 401331)
防護工程風管清掃機器人車載控制系統設計
茅靳豐1,劉立瑤1,張 虎2,侯普民1,鄧忠凱1
(1. 解放軍理工大學 國防工程學院,江蘇 南京 210007; 2. 后勤工程學院,重慶 401331)
為提高防護工程內部空氣環境質量,針對平戰兩用風管清掃機器人設計了一種控制系統。首先設計了清掃機器人的電氣控制方式,并繪制了機器人車載控制系統的電路框圖。對車載控制系統的五個主要部分進行了設計,繪制了車載控制系統的框圖,并制作了車載控制系統PCB板。將該控制系統用于清掃機器人,進行了樣機的設計制作,綜合性能良好。
風管清掃;機器人;車載控制系統
Abstract: In order to improve the quality of the internal air environment of the protective engineering, a control system was designed for the flat-war dual-use duct cleaning robot. The electrical control mode of the cleaning robot is designed, and the circuit block diagram of the robot vehicle control system is drawn. The five main parts of the vehicle control system are designed, the block diagram of the vehicle control system is drawn, and the car control system PCB board is made. The control system was used to clean the robot and the prototype was designed, which shows a good comprehensive performance.
Key words:duct cleaning; robots; vehicle control system
0 引言
防護工程是戰時我方人員的主要活動場所,工程內部的環境關系到人員的身體健康,必須采取有效措施完善工程內部的空氣環境[1]。目前,大部分防護工程已經進入維護時期,由于風管中具有適宜的溫度條件、濕度條件和足夠聚集區域的塵埃,就容易孽生或繁殖一些微生物,如細菌、病毒、螨蟲、真菌和昆蟲,這些都嚴重污染了工程內部的空氣環境。在遭到核生化武器攻擊時,通風口部會沾染嚴重的生化污染或放射性物質(氯化氰和氰氫酸等),這些成分在清潔通風時,會對人員造成致命傷害,必須完全清除。因此,為各個使用和維護單位研制一種智能化且適合平戰兩用的風管清掃機器人意義重大。
1 清掃機器人電氣控制方式
本文研究的風管清掃機器人采用上、下位機通過RS485進行串行通信的形式。上位機(PC)主要負責發送動作指令,接收超聲波傳感器的反饋信息。下位機主要負責采集超聲波傳感器的信息,控制電機的運轉。清掃機器人的電氣控制方式如圖1所示,從結構上劃分,機器人電氣控制系統主要包含三個部分,即PC監控系統(上位機)、車載控制系統(下位機)、視頻監測系統。車載控制系統一方面直接控制機器人電機的動作,另一方面實時采集測距傳感器的數據。
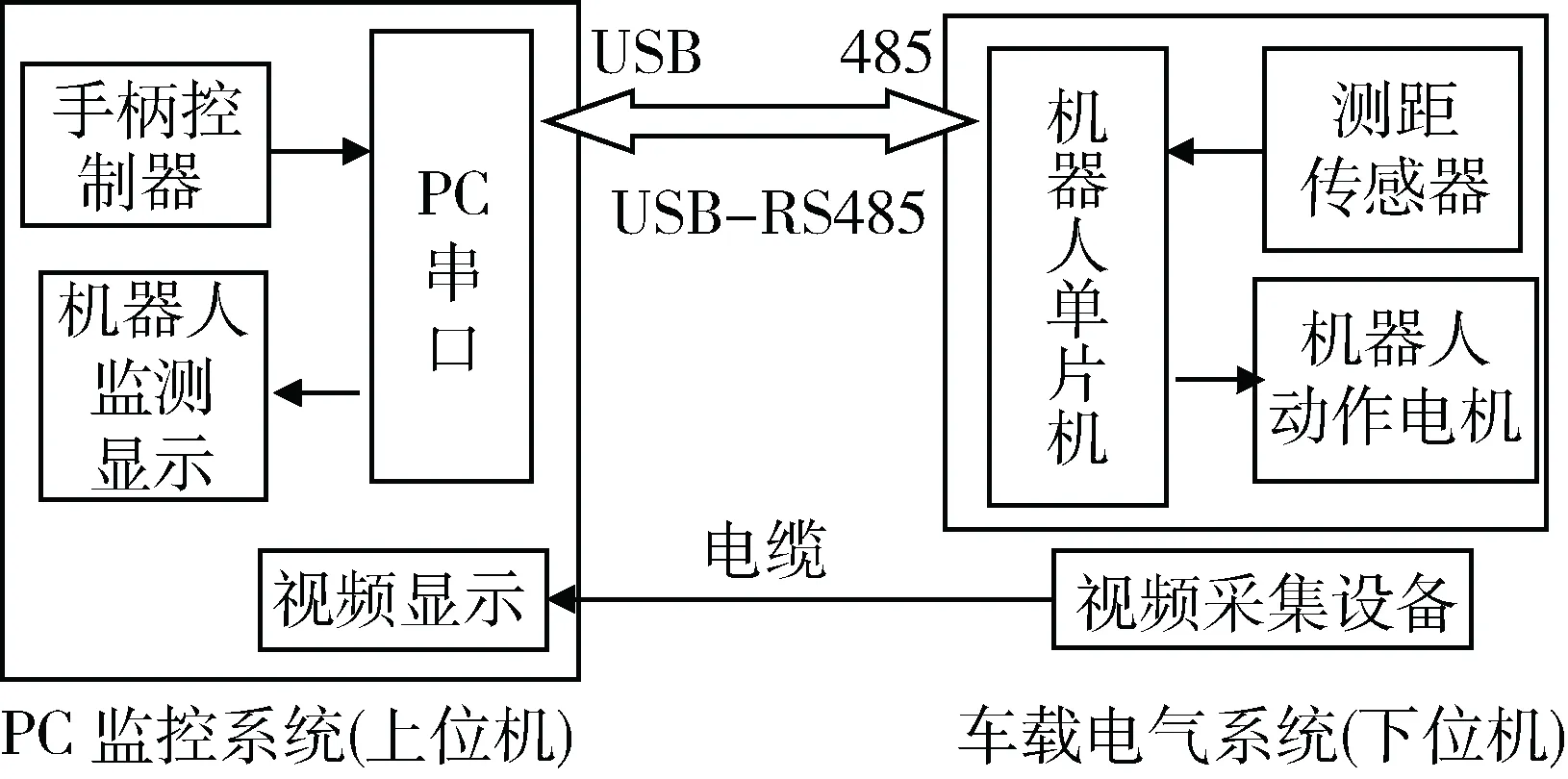
圖1 清掃機器人電氣控制方式
2 機器人車載控制系統
機器人車載控制系統的電路框圖如圖2所示,主要包括Atmega16主控芯片、電機驅動電路、通信電路、超聲波傳感器信號收發電路和電源電路五個部分,下面對這五個主要部分進行詳細分析。
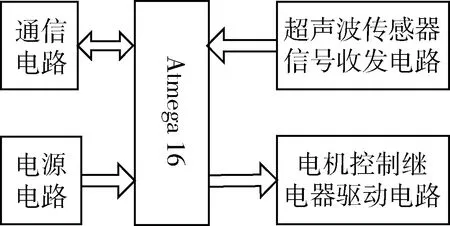
圖2 機器人車載控制系統電路框圖
2.1 Atmega16主控芯片
作為車載控制系統的核心器件,經過比較,系統選用8位高性能的Atmega16微處理器,它是新一代基于哈佛結構的高速精簡指令集計算機(Reduced Instruction Set Computer,RISC)微控制器,具有速度快、價格低、可靠性高、I/O口驅動能力強和片內集成外設資源豐富等特點[2]。
2.2電機驅動電路
電機驅動電路如圖3所示,為了保證更高的可靠性,采用傳統型繼電器來完成電機工作狀態控制,單片機信號通過三極管進行功率放大,即可由端口直接控制繼電器線圈的通電和斷電,實現對繼電器觸點通斷的控制。其中D2為反向保護二極管,可在繼電器斷開瞬間防止出現較大的感應電壓擊穿三極管;Q2為三極管,作用是放大功率,驅動繼電器動作;DS2為工作指示燈,當繼電器吸合時燈亮,其中R5為限流電阻。
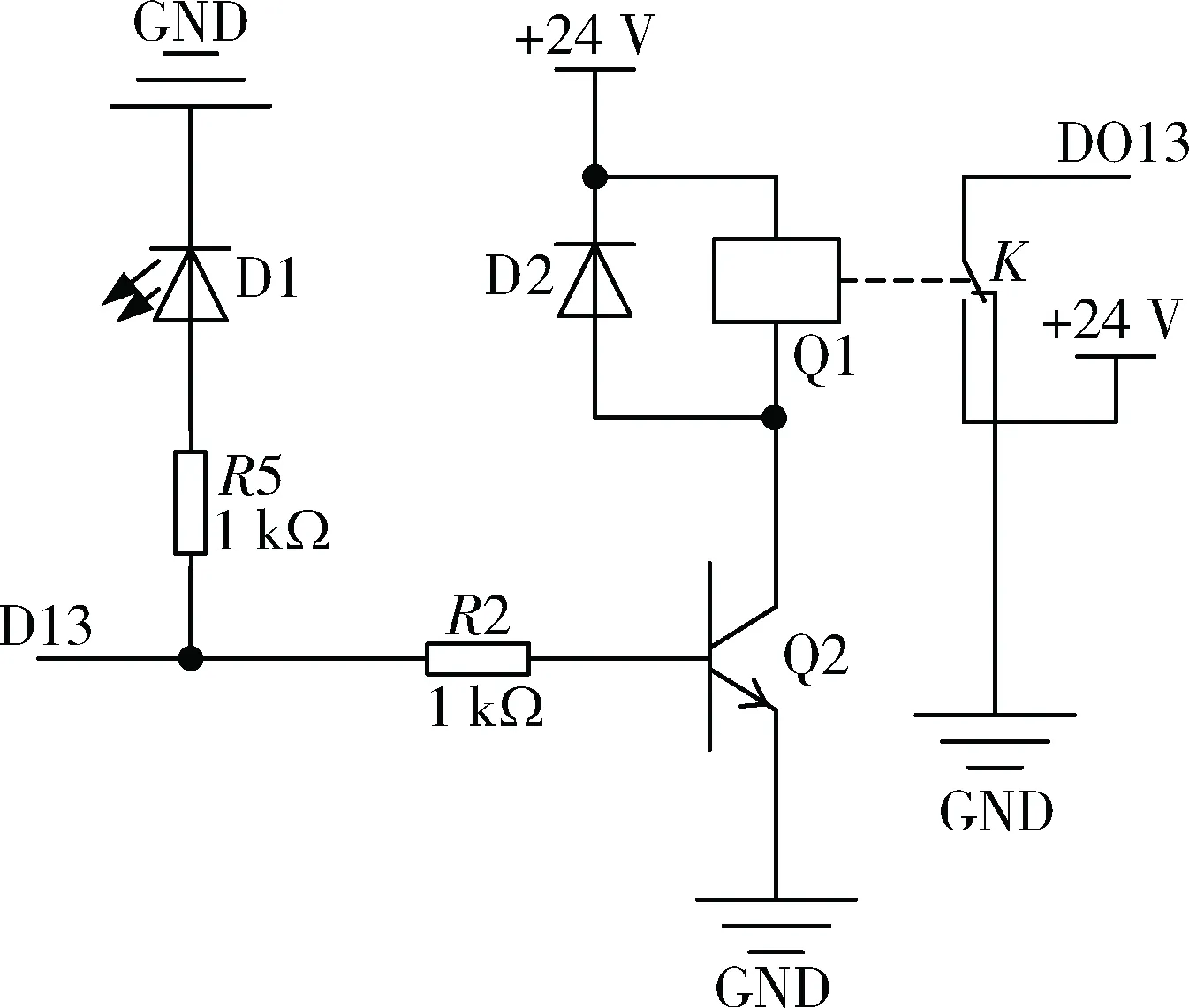
圖3 電機驅動電路
單片機外接的電機驅動電路主要包括:機器人底盤電機2個(左右)、左側刷電機2個(上下)、右側刷電機2個(上下)、地刷電機2個(左右)、吸塵器電機1個。由于地刷同時工作,因此只需一路控制電路。由于機器人采用單邊清掃,因此左側刷和右側刷各需一路控制信號。所以,控制電路板上要有6路電機驅動電路。由于毛刷電機和底盤電機均采用24 V供電,因此選用24 V繼電器進行控制。吸塵器采用220 V供電,所以要選用220 V繼電器。
2.3超聲波傳感器收發電路
(1)超聲波發送電路
超聲波發射電路由超聲波探頭和超聲波放大器組成。超聲波探頭將電信號轉換為機械波發射出去,而單片機所產生的40 kHz的方波脈沖需要進行放大才能將超聲波探頭驅動將超聲波發射出去,所以發射驅動實際上就是一個信號的放大電路,選用74LS04芯片進行信號放大,超聲波發射電路如圖4所示。工作時,由單片機產生40 kHz的脈沖從P0.1口向超聲波的發射電路部分發出信號,再經74LS04放大電路放大后,驅動超聲波探頭將超聲波發射出去。

圖4 超聲波發射電路
(2)超聲波接收電路
由于超聲波在空氣中傳播的過程中是有衰減的,如果距離較遠,那么超聲波接收電路所接收到的超聲波信號就會比較微弱,因此需要對接收到的信號進行放大而且放大的倍數也要比較大。超聲波接收電路主要是由集成電路CX20106A芯片電路構成的,CX20106A芯片電路可以對超聲波信號進行放大、限幅、帶通濾波、峰值檢波、整形、比較等操作,之后超聲波接收電路會輸出一個低電平到單片機去請求中斷,當單片機停止計數時,開始進行數據處理。超聲波接收電路如圖5所示。
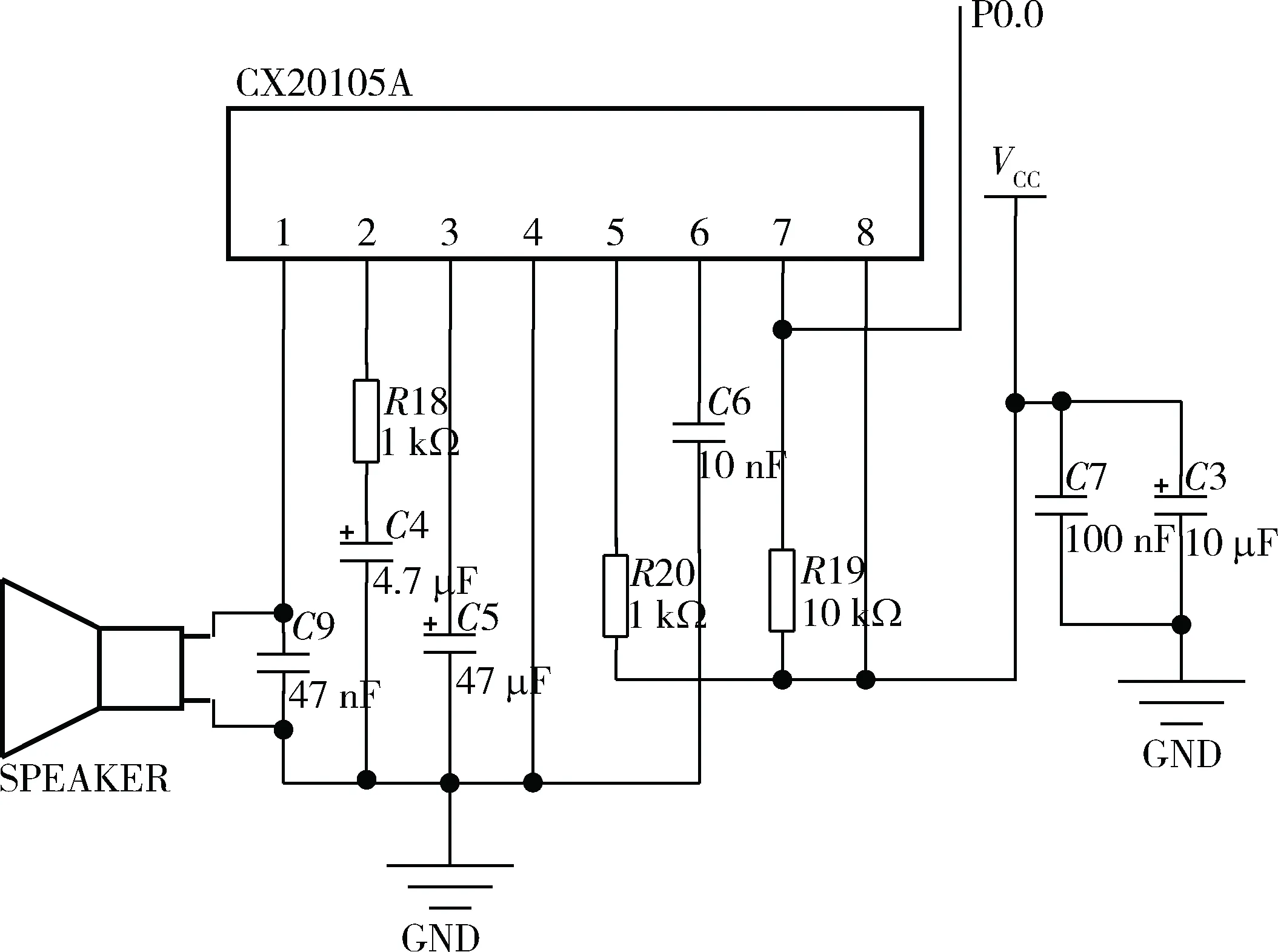
圖5 超聲波接收電路
2.4通信電路
通信電路的作用是實現風管清掃機器人與PC之間的通信,使工作人員能夠通過控制器對風管中作業的機器人進行各項動作控制。根據風管清掃機器人的研制要求,機器人在風管內作業的最大距離有30 m,RS485總線最大傳輸距離為1.2 km,最大速率可達10 Mb/s,完全可以滿足風管清掃機器人的距離要求,也能夠滿足通信的實時性要求。另外,RS485總線具有可靠性高、成本低、開發時間短等優勢,所以本系統選擇采用RS485通信技術。
通信電路原理如圖6所示,選用MAX485作為RS485接口器件,MAX485為低功耗的半雙工RS485收發器件,其波特率可高達2.5 Mb/s,DC 5 V電壓供電,其輸出和輸入ESD保護電壓可達15 kV,MAX485芯片引腳1接Atmega16的PD0(RXD),即USART的數據接收引腳,MAX485芯片引腳4接Atmega16的PD1(TXD),即USART的數據發送引腳,同時將MAX485芯片引腳2(接收輸出使能,低電平有效)和MAX485芯片引腳3(發送輸出使能,高電平有效)接在PD2引腳上,當PD2為高電平時,RS485處于發送狀態,當PD1為低電平時,RS485處于接收狀態。C5、C7、C8均為0.1 μF電容,起電路濾波作用;R17、R22、R23、R24、R25為高阻值電阻,起限流作用。
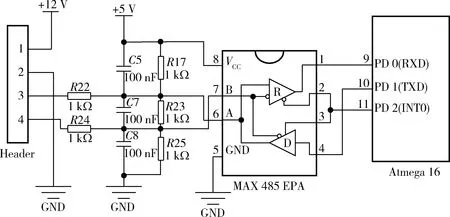
圖6 通信電路原理圖
2.5電源電路
為了滿足微處理器電路對5 V電壓源的需求,采用集成穩壓電源LM7805實現DC 12 V電壓到DC 5 V電壓的轉換,電源電路原理如圖7所示,C1和C2為鋁電解電容,因為輸出電流小于5 A,且交流電網干擾中大部分是高次諧波,故采用100 μF濾除50 Hz以上的高次諧波;C3和C4為高頻陶瓷電容或聚酯電容,選用0.1 μF/63 V,濾除電源中的高頻諧波。LM7805三端穩壓電源所需的外圍元件極少,電路內部還有過流、過熱及調整管的保護電路,性能可靠、使用簡便,并且具有較高的性價比[3]。
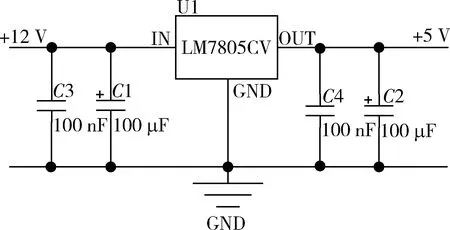
圖7 電源電路原理圖
3 車載控制系統PCB板的制作
3.1單片機端口的分配
由前面分析可知車載控制系統電路板的外接電路主要包括:電源模塊、通信模塊、電機模塊、傳感器模塊。其中電機模塊包括:地刷電機、側刷電機(左、右)、左輪電機、右輪電機、吸塵器電機。傳感器模塊包括:左前、右前、左后、右后四個超聲波傳感器。由于Atmega16主控芯片具有32個高驅動能力可編程I/O端口,如何分配I/O端口對電路板的可靠性和程序的編寫至關重要。本項目車載控制系統采用了以Atmega16主控芯片為系統核心部件的集散控制,車載控制系統的框圖如圖8所示。
Atmega16單片機共有PA、PB、PC、PD 4個8位I/O端口。作為最小系統板,需要將這4個I/O端口進行合理的分配。根據需求分析, PA、PB主要作為輸出端口,用來控制電機的運轉,主要包括頂刷電機、地刷電機、側刷電機、左輪電機、右輪電機、吸塵器電機。PC主要作為輸入端口,用來采集傳感器測得的距離。PD口主要作為第二功能端口,主要包括通信端口、JTAG仿真接口電路。具體的分配情況如表1所示。
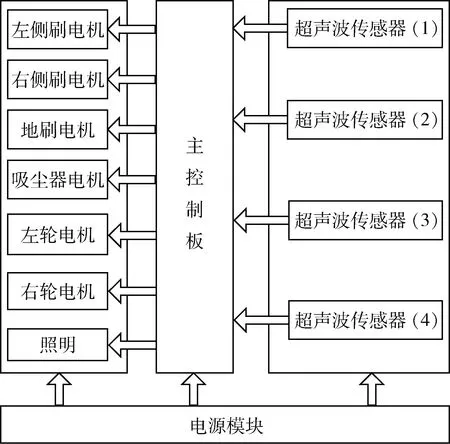
圖8 車載控制系統框圖

端口PA0PA1PA2PA3PB0PB1PB2PB3PB4PB5PB6PB7PC1?PC7PA7PD5?PD7PD0?PD2功能右輪電機左輪電機左側刷電機右側刷電機地刷電機吸塵器電機超聲波傳感器狀態指示燈ISP在線編程口通信接口
3.2 PCB電路板
根據車載控制系統各組成部件的電路設置以及單片機的端口分配情況,研制了車載控制系統的主控制板。在研制主控制板時,充分考慮到系統的穩定運行,嚴格按照文獻[4]所列舉的研制原則進行。本文研究的車載控制系統的PCB印刷電路板以及電路板性能可靠。通過實地測試,該清掃機器人綜合性能良好。
4 結論
本文針對平戰兩用風管清掃機器人設計了一種控制系統,清掃機器人的電氣控制方式采用上、下位機通過RS485進行串行通信的形式,并繪制了機器人車載控制系統的電路框圖。對車載控制系統的五個主要部分進行了設計,主要包括Atmega16主控芯片、電機驅動電路、通信電路、超聲波傳感器信號收發電路和電源電路。繪制了車載控制系統的框圖,并制作了車載控制系統PCB板。將該控制系統用于清掃機器人,進行了樣機的設計,經實地測試性能良好。
[1] 國家質量監督檢驗檢疫總局GB 19210—2003空調通風系統清洗規范[S].2003.
[2] 陳會鴿.基于機器視覺的中央空調風管清潔機器人測控系統研究[D].鄭州:河南工業大學,2010.
[3] 章霄,董艷雪,趙文娟,等.數字圖像處理技術[M].北京:冶金工業出版社,2005.
[4] 黃智偉.印制電路板(PCB)設計技術與實踐[M].北京:電子工業出版社,2009.
Design of vehicle control system for duct cleaning robot of protective engineering
Mao Jinfeng1, Liu Liyao1, Zhang Hu2, Hou Pumin1, Deng Zhongkai1
(1. College of Defense Engineering, PLA University of Science and Technology, Nanjing 210007, China; 2. Logistic Engineering University of PLA,Chongqing 401331)
TP242.3
A
10.19358/j.issn.1674- 7720.2017.18.011
茅靳豐,劉立瑤,張虎,等.防護工程風管清掃機器人車載控制系統設計[J].微型機與應用,2017,36(18):36-38,42.
2017-03-17)
茅靳豐(1962-),男,博士,教授,主要研究方向:防護工程內部設備及系統。
劉立瑤(1993-),通信作者,男,碩士研究生,主要研究方向:防護工程內部設備及系統。E-mail:lly19930317@126.com。
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設計工程(2015年15期)2015-02-27 12:07:30
電子設計工程(2015年8期)2015-02-27 12:05:36
