基于CIVA仿真的管道超聲內(nèi)檢測參數(shù)設(shè)計(jì)與優(yōu)化*
2017-10-11 07:48:42繆存堅(jiān)凌張偉杜興吉
焊管 2017年7期
繆存堅(jiān),凌張偉,杜興吉,王 敏
(浙江省特種設(shè)備檢驗(yàn)研究院,杭州310020)
基于CIVA仿真的管道超聲內(nèi)檢測參數(shù)設(shè)計(jì)與優(yōu)化*
繆存堅(jiān),凌張偉,杜興吉,王 敏
(浙江省特種設(shè)備檢驗(yàn)研究院,杭州310020)
為了設(shè)計(jì)并優(yōu)化管道超聲內(nèi)檢測工藝參數(shù),從檢測原理、聚焦法則、工藝參數(shù)等方面闡述了超聲相控陣在管道內(nèi)檢測中對凹面結(jié)構(gòu)檢測的應(yīng)用,基于CIVA仿真對安裝在管道內(nèi)部的凸面相控陣裝置參數(shù)及其檢測工藝展開研究,模擬了帶有焊縫、環(huán)切槽、側(cè)向孔等缺陷特征的管道的聲場特性,并利用仿真獲得的數(shù)據(jù)演化規(guī)律對水程和陣列動(dòng)態(tài)孔徑進(jìn)行了優(yōu)化。基于仿真與優(yōu)化獲得的參數(shù)制造了相應(yīng)的相控陣檢測裝置,并通過對樣管的超聲檢測測試,驗(yàn)證了設(shè)計(jì)參數(shù)的合理性以及基于CIVA仿真設(shè)計(jì)裝置的可行性。
管道;無損檢測;CIVA仿真;人工缺陷;超聲內(nèi)檢測;相控陣
Abstract:In order to design and optimize the parameters of ultrasonic inner inspection,the application of ultrasonic phased array in the detection of concave structure was described from the aspects of inspection principle,focal law and process parameters.Based on CIVA simulation,the parameters and detection technology of convex phase phased array device installed inside the pipe were studied,and the ultrasound field characteristics in the pipe were simulated with defects characteristics of welds,circumferential cutting grooves,lateral hole and so on were simulated.Furthermore,the ultrasound propagation in water and dynamic element window were optimized by using the obtained simulation data.Thus,the phased array detection device was fabricated with the reference of the characteristics above.The experiments on the testing pipe were conducted and the rationality of the design parameters was verified,as well as the feasibility of designing device with the assistance of CIVA simulation.
Key words:pipeline;noudestructive examination;CIVA simulation;artificial defect;ultrasonic inner detection;phased array
隨著無損檢測技術(shù)的不斷發(fā)展和新材料、新結(jié)構(gòu)、新環(huán)境的接連出現(xiàn),出現(xiàn)了埋在公路和鐵路下的管道、深藏在河流與海洋底部的管線以及高空懸空管道等,管道檢測面臨著各種新的考驗(yàn),管道安裝要求也日益提高。面對這些日益困難的檢測環(huán)境,傳統(tǒng)的外檢測方法已不能很好地滿足管道檢測與安全保障,管道檢測已由傳統(tǒng)的外檢測逐漸向內(nèi)檢測過渡,使得內(nèi)檢測成為一種有效的檢測替代手段,彌補(bǔ)了外檢測的不足[1-3]。
超聲相控陣是一種有效的內(nèi)檢測手段,其針對被檢管道材質(zhì)及結(jié)構(gòu)的不同,以及檢測對耦合、聲場回波等的要求,配備不同的檢測參數(shù),以獲得良好的檢測效果[4-5]。為獲得合理、有效的檢測工藝參數(shù)組合,需要對檢測工藝進(jìn)行反復(fù)調(diào)試。出于時(shí)間、經(jīng)濟(jì)成本等因素的考慮,采用數(shù)值方法對檢測工藝進(jìn)行模擬,研究不同環(huán)境下相控陣技術(shù)內(nèi)檢測的可行性,對檢測工藝的制定、檢測裝置的研制及開發(fā)均有重要的意義。
本研究針對某常用規(guī)格管道開展超聲相控陣內(nèi)檢測研究,應(yīng)用CIVA仿真建模對超聲相控陣檢測參數(shù)進(jìn)行分析。在頻率等基本參數(shù)確定的前提下,通過對不同形狀特征人工缺陷的仿真檢測,分析不同缺陷處的超聲聲場與回波特性,研究探頭水程、陣元?jiǎng)討B(tài)孔徑等參數(shù)的變化對檢測結(jié)果的影響規(guī)律,并利用優(yōu)化后參數(shù)設(shè)計(jì)制造的檢測裝置開展樣管測試,驗(yàn)證基于CIVA仿真設(shè)計(jì)的可行性。
1 相控陣檢測原理與延時(shí)法則
超聲相控陣技術(shù)以惠更斯-菲涅爾原理(huygens-fresnel principle)為依據(jù),通過控制換能器陣列中的各個(gè)壓電晶片,使超聲波信號(hào)按照一定的延時(shí)法則執(zhí)行發(fā)射與接收,從而實(shí)現(xiàn)超聲波在介質(zhì)中的偏轉(zhuǎn)和聚焦[6]。
一維線性相控陣是超聲相控陣中的典型陣列,可以將線性陣列近似看作多個(gè)單矩形陣元的集合,而單矩形陣元的聲源可視作無數(shù)點(diǎn)源的組成。根據(jù)超聲波采用脈沖聲源在理想介質(zhì)中傳播的波動(dòng)方程(1),可以得到空間中任意一點(diǎn)r在t時(shí)刻的聲場p0(r,t),用瑞利積分可表示為公式(2)[7]

式中:c—縱波波速;
p—聲壓;
t—超聲傳播時(shí)間。
式中:p0(r,t)—表示點(diǎn)r處在t時(shí)刻的聲場強(qiáng)度;
ρ0—介質(zhì)密度;
v—探頭表面點(diǎn)源在t時(shí)刻的振動(dòng)速度;
rT—探頭表面的點(diǎn)源位置;
r-rT|—從點(diǎn)源到空間中點(diǎn)r處的距離;
dS(rT)—探頭點(diǎn)源 rT的面積。
由于管道內(nèi)部是凹面特征,因此,采用凸面相控陣進(jìn)行內(nèi)檢測時(shí),其延時(shí)法則與一維線性陣列不同,同時(shí),考慮到常規(guī)儀器采用的通常都是少量陣元與機(jī)械旋轉(zhuǎn)相結(jié)合,在內(nèi)檢測時(shí)會(huì)出現(xiàn)較多機(jī)械結(jié)構(gòu)方面的問題。因此,采用更為合適的電子掃查聲束旋轉(zhuǎn)的方式代替機(jī)械掃查[8-9],并通過簡化的延時(shí)法則來簡化計(jì)算過程。
電子掃查原理如圖1所示。超聲波在鋼中經(jīng)過r0、r1、…rm傳播,在水中經(jīng)過l0、l1、…lm傳播,在鋼中實(shí)際焦點(diǎn) A(x,y)處聚焦。圖中 C(xm,ym)為第 m 號(hào)陣元的坐標(biāo),B(xm′, ym′)為超聲波入射點(diǎn)坐標(biāo),O(xo,yo)為參考點(diǎn), D(x0′, y0′)為聚焦點(diǎn)到水鋼界面最短距離的點(diǎn),α、β分別是No.m陣元接收從鋼中傳遞來的波束在鋼水界面處的入射角與反射角。

圖1 相控陣電子掃查原理
根據(jù)相控陣延時(shí)法則,No.m陣元的信號(hào)延時(shí)為
式中:c1—鋼中的超聲波縱波波速;
c2—水中的波速。
超聲波經(jīng)界面折射時(shí)的特性可由公式(4)表征,距離AB和CD則可分別經(jīng)公式(5)和公式(6)計(jì)算獲得。


當(dāng)m確定時(shí),將已知坐標(biāo)代入式(3)可得延時(shí)值。由于檢測中聲束不偏轉(zhuǎn),基于同樣方法可得到所有陣元的延時(shí)值,從而形成陣元激發(fā)法則。
2 管道內(nèi)檢測工藝
2.1 仿真用管道
管道由于安裝位置等因素導(dǎo)致很難進(jìn)行外檢測時(shí),更傾向于采用內(nèi)檢測,例如儲(chǔ)氣井、豎直管道、架空管道、埋地管道等管狀設(shè)備,這些管狀設(shè)備內(nèi)部可能因?yàn)殚L期環(huán)境與介質(zhì)的腐蝕形成各類腐蝕缺陷與厚度減薄。
以外徑159 mm、厚度8 mm的某規(guī)格管道為例,采用CIVA仿真模擬研究超聲相控陣進(jìn)行管道內(nèi)檢測的工藝參數(shù)合理性。管道主體為一圓形截面管道,總長1 000 mm,低碳鋼材質(zhì),并在不同位置共設(shè)置了3道不同深度、同樣寬度的環(huán)形切槽,以及兩排不同深度和直徑的平底孔,具體缺陷規(guī)格如圖2所示。假設(shè)焊縫與母材材料力學(xué)特性相近,則帶有余高的焊縫在結(jié)構(gòu)上與凹陷的環(huán)形切槽類似,屬于管道幾何結(jié)構(gòu)的變化,因此以環(huán)形切槽表征焊縫的聲學(xué)特性。
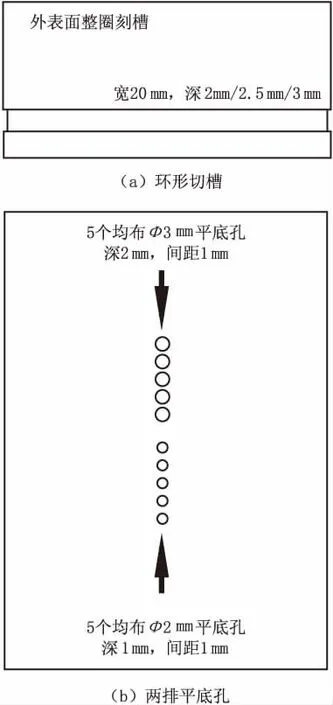
圖2 管道人工缺陷的具體規(guī)格
2.2 基于CIVA的工藝優(yōu)化
2.2.1 CIVA仿真軟件
CIVA是法國原子能委員會(huì)(CEA)研發(fā)的一款無損檢測仿真軟件[10-11],它基于半解析模型原理,包含超聲、渦流和射線等3個(gè)檢測模塊。在超聲檢測仿真中可實(shí)現(xiàn)聲束計(jì)算和缺陷響應(yīng),能夠?qū)μ筋^參數(shù)、檢測工藝的制定起到很好的指導(dǎo)作用。以下采用CIVA對凸面相控陣在管道內(nèi)檢測中的工藝參數(shù)展開仿真模擬研究。
2.2.2 超聲檢測參數(shù)
與常規(guī)管道內(nèi)檢測儀采用少量陣元和機(jī)械旋轉(zhuǎn)不同,本研究提出的凸面相控陣將大量陣元分布在凸形圓柱面上,利用電子掃查方式在管道內(nèi)旋轉(zhuǎn)聚焦,在提高工作效率的同時(shí)避免了機(jī)械結(jié)構(gòu)帶來的旋轉(zhuǎn)問題。
凸面相控陣檢測工藝存在一系列參數(shù)需要確定,如工作頻率、陣元尺寸、陣列動(dòng)態(tài)孔徑等,與檢測工藝及裝置結(jié)構(gòu)關(guān)系密切。陣元尺寸包括陣元間距、陣元寬度、陣元長度。其中陣元長度通常固定為10 mm。為了抑制旁瓣,陣元寬度a應(yīng)盡量接近陣元間距,考慮到成本與檢測精度,最終確定陣元寬度為0.7 mm,間距為0.8 mm。工作頻率選擇常用5 MHz。根據(jù)圖1所示,凸面相控陣將經(jīng)過水浸耦合在管道內(nèi)形成聚焦,因此水程長度是裝置結(jié)構(gòu)的重要參數(shù),考慮到管道內(nèi)外徑尺寸,暫定仿真中探頭外直徑為130 mm。另一方面,凸面相控陣由于自身結(jié)構(gòu)的特性會(huì)導(dǎo)致不易聚焦,比平面的線性陣列更難聚焦,因此在設(shè)置激發(fā)陣列動(dòng)態(tài)孔徑時(shí),暫定使用6個(gè)作為陣列的動(dòng)態(tài)孔徑。
2.2.3 建模仿真
應(yīng)用超聲仿真軟件CIVA建立的檢測對象模型如圖3所示。
從圖3可以看到模型帶有不同規(guī)格的平底孔和環(huán)形切槽。圖4是超聲探頭檢測示意圖,通過編輯合適的計(jì)算區(qū)域降低仿真計(jì)算量。
通過計(jì)算可以得到不同缺陷處的聲場分布特征和缺陷響應(yīng),如圖5所示。從圖5可以看出,仿真檢測中,缺陷所處位置的聲場和響應(yīng)都較為強(qiáng)烈,容易被發(fā)現(xiàn)。

圖3 利用CIVA建立的仿真模型
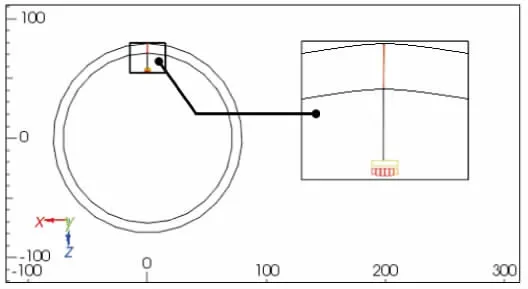
圖4 超聲探頭檢測示意圖
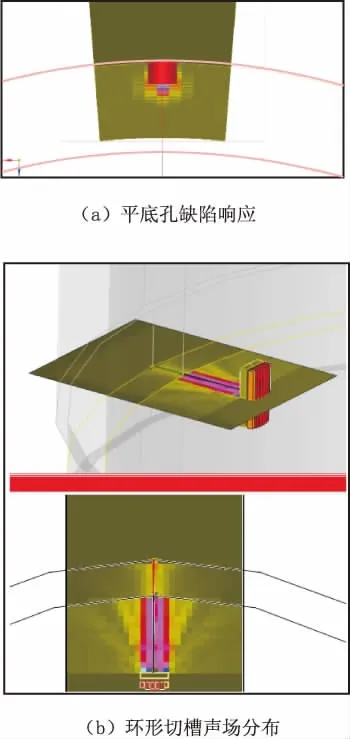
圖5 不同缺陷處的聲場與響應(yīng)
2.2.4 陣列動(dòng)態(tài)孔徑
根據(jù)先前設(shè)置,水程為13 mm,探頭外直徑為130 mm。為研究陣列動(dòng)態(tài)孔徑對相控陣檢測的影響規(guī)律,在考慮凸面相控陣結(jié)構(gòu)特點(diǎn)的基礎(chǔ)上,設(shè)置4、6、8、10和12個(gè)陣元分別同時(shí)激發(fā),計(jì)算獲得的聲場分布,得到探頭軸向聲場隨動(dòng)態(tài)孔徑的變化規(guī)律,如圖6所示。

圖6 軸向聲場隨動(dòng)態(tài)孔徑的變化規(guī)律
根據(jù)仿真結(jié)果,在管壁內(nèi)的聚焦區(qū)域,隨著陣列動(dòng)態(tài)孔徑從4個(gè)增大至12個(gè),聲場聲壓總體呈現(xiàn)先上升再下降的變化趨勢。當(dāng)動(dòng)態(tài)孔徑從4個(gè)增長至8個(gè)時(shí)基本呈現(xiàn)單調(diào)遞增規(guī)律;當(dāng)孔徑繼續(xù)增大時(shí),由于凸面的特性,聚焦性能不升反降,10個(gè)孔徑的聲場總體比8個(gè)孔徑時(shí)小,而12個(gè)孔徑的聲場在靠近外壁處聲場較低,而在靠近內(nèi)壁處則較高。從整體看,當(dāng)動(dòng)態(tài)孔徑為8個(gè)時(shí),其綜合聲場表現(xiàn)最好。
2.2.5 水程
鑒于管道內(nèi)直徑為143 mm,為了研究水程對聲場聚焦的影響,設(shè)置水程分別為30 mm、20 mm、15 mm、10 mm和5 mm,陣列動(dòng)態(tài)孔徑設(shè)置8 mm,分別計(jì)算其聲場分布,從而獲得探頭軸向聲場聲壓隨水程的變化規(guī)律如圖7所示。
圖7結(jié)果顯示,在管道管壁內(nèi),靠近外壁處(即焦點(diǎn)位置附近)聲場聲壓最高,越靠近內(nèi)壁聲場越弱。另一方面,從液體介質(zhì)折射進(jìn)入管壁時(shí)聲場也有明顯衰減。超聲回波與管壁內(nèi)聲場強(qiáng)度緊密相關(guān),在聲場最高點(diǎn)處,隨著水程的增加,聲壓整體上呈降低趨勢。當(dāng)水程從5 mm增加到13 mm時(shí),聲壓反而上升了一段,超過了5 mm水程對應(yīng)的聲壓;當(dāng)水程從20mm增加到30 mm時(shí),也出現(xiàn)了類似的增長現(xiàn)象。由此可以認(rèn)為,當(dāng)水程為13 mm(即探頭外直徑為130 mm)時(shí),聲場聲壓高,水程長度合理。

圖7 探頭軸向聲場聲壓隨水程的變化規(guī)律
2.3 仿真結(jié)果比較分析
2.3.1 與實(shí)際結(jié)構(gòu)比較
以3 mm直徑平底孔為例,其仿真檢測結(jié)果如圖8所示。根據(jù)顯示的缺陷及“6 dB”方法(以超聲幅度下降到最大值的50%作為缺陷的邊界),近似確定缺陷尺寸約3.04 mm,與真實(shí)平底孔直徑3 mm基本一致。
2.3.2 與設(shè)備檢測結(jié)果比較
根據(jù)參數(shù)的計(jì)算與設(shè)計(jì),制造了凸面相控陣管道內(nèi)檢測裝置,試驗(yàn)樣管的檢測照片如圖9所示。檢測裝置在浸入充滿水的試驗(yàn)管道后實(shí)施檢測。

圖8 CIVA仿真檢測結(jié)果計(jì)算

圖9 試驗(yàn)樣管檢測現(xiàn)場

圖10 樣管缺陷檢測C掃描圖
圖10為檢測獲得的C掃描圖,掃描獲得的圖像可根據(jù)顏色直接分辨出所檢出孔的深度范圍以及人工缺陷的形狀和尺寸。圖中平底孔缺陷因?yàn)闄M坐標(biāo)的放大而被拉長,根據(jù)圖中計(jì)量手段可以獲得孔徑在垂直移動(dòng)方向上的尺寸約3 mm,即平底孔的直徑,與實(shí)際情況相符。另一方面,C掃描厚度檢測的誤差約在0.2 mm范圍內(nèi),通過顏色可直觀判斷3 mm直徑平底孔深度在2 mm左右,而直徑2 mm的平底孔則深度在1 mm左右,與實(shí)際情況相符。
3 結(jié) 論
(1)采用CIVA可以有效模擬仿真管道內(nèi)超聲相控陣在檢測管道和人工缺陷時(shí)的超聲聲場分布特性和缺陷響應(yīng),并可以通過參數(shù)化分析得出不同工藝參數(shù),如水程和陣列動(dòng)態(tài)孔徑等對檢測結(jié)果的影響規(guī)律,可用于指導(dǎo)相控陣檢測裝置的設(shè)計(jì)制造以及相控陣內(nèi)檢測工藝參數(shù)的設(shè)置,從而代替試驗(yàn),成為一種有效的管道檢測工藝設(shè)計(jì)與調(diào)試的手段,有效縮短時(shí)間。
(2)通過實(shí)際樣管測量結(jié)果、試驗(yàn)中實(shí)際設(shè)備檢測結(jié)果以及CIVA的仿真模擬結(jié)果之間的對比分析,表明仿真結(jié)果與實(shí)際結(jié)構(gòu)以及實(shí)際裝置檢測結(jié)果基本一致,驗(yàn)證了基于CIVA仿真設(shè)計(jì)相控陣檢測裝置的可行性。研究表明,優(yōu)化后的檢測裝置參數(shù)與檢測工藝參數(shù)適用于此類規(guī)格管道的超聲相控陣內(nèi)檢測。
[1]龔文,何仁洋,趙宏林,等.國外油氣管道內(nèi)檢測技術(shù)的前沿應(yīng)用[J].管道技術(shù)與設(shè)備,2013(4):24-26.
[2]鬲麗華,田光.管道內(nèi)檢測在天然氣長輸管道中的應(yīng)用[J].中國石油和化工標(biāo)準(zhǔn)與質(zhì)量,2016(18):32-33.
[3]劉春亮.輸油站場埋地管道防腐層選材與站間管道內(nèi)檢測評(píng)價(jià)[D].成都:西南石油大學(xué),2016.
[4]鐘志民,梅德松.超聲相控陣技術(shù)的發(fā)展及應(yīng)用[J].無損檢測,2002,24(2):69-71.
[5]靳世久,楊曉霞,陳世利,等.超聲相控陣檢測技術(shù)的發(fā)展及應(yīng)用[J].電子測量與儀器學(xué)報(bào),2014,28(9):925-934.
[6]HUANG R J,SCHMERR L W.Characterization of the system functions of ultrasonic linear phased array inspection systems[J].Ultrasonics,2009,49(2):219-225.
[7]王文龍,師芳芳,張茉莉,等.凹面線性相控陣聚焦與掃描成像[J].聲學(xué)學(xué)報(bào),2008,33(2):164-170.
[8]鄭暉,林樹青.超聲檢測[M].北京:新華出版社,2008.
[9]施克仁,郭寓岷.相控陣超聲成像檢測[M].北京:高等教育出版社,2010.
[10]CALMON P,MAHAUT S,CHATILLON S,et al.CIVA:An expertise platform for simulation and processing NDT data[J].Ultrasonics,2006(44):975-979.
[11]MAHAUT S,CHATILLON S,DARMON M,et al.An overview of ultrasonic beam propagation and flaw scattering models in the civa software[J].Review of Progress in Quantitative Nondestructive Evaluation, 2010, 1211(1): 2133-2140.
Parameter Design and Optimization of Ultrasonic Inner Inspection for Pipes Based on CIVA Simulation
MIAO Cunjian,LING Zhangwei,DU Xingji,WANG Min
(Zhejiang Provincial Special Equipment Inspection and Research Institute,Hangzhou 310020, China)
TE973.6
B
10.19291/j.cnki.1001-3938.2017.07.002
2017-04-25
編輯:李紅麗
浙江省質(zhì)量技術(shù)監(jiān)督系統(tǒng)科研計(jì)劃項(xiàng)目“基于超聲內(nèi)檢測的壓力管道智慧球研究”(項(xiàng)目編號(hào)20160122);浙江省科技計(jì)劃項(xiàng)目“壓力管道自漂流式超聲內(nèi)檢測智能球研制”(項(xiàng)目編號(hào)2017C33162)。
繆存堅(jiān)(1985—),男,浙江溫州人,高級(jí)工程師,博士,主要從事特種設(shè)備無損檢測研究工作。
猜你喜歡
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
山東冶金(2019年6期)2020-01-06 07:45:54
世界農(nóng)藥(2019年2期)2019-07-13 05:55:12
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
銅業(yè)工程(2015年4期)2015-12-29 02:48:39
新疆鋼鐵(2015年3期)2015-11-08 01:59:52