基于軟件的GNSS轉發式欺騙系統的仿真實現
2017-10-11 13:11:41戴偉昊劉建業丁夢羽
導航與控制 2017年5期
戴偉昊,許 睿,劉建業,丁夢羽,祁 雅
(南京航空航天大學導航研究中心,南京211106)
基于軟件的GNSS轉發式欺騙系統的仿真實現
戴偉昊,許 睿,劉建業,丁夢羽,祁 雅
(南京航空航天大學導航研究中心,南京211106)
根據軟件接收機與轉發式欺騙系統的基本理論,基于軟件設計了GNSS轉發式欺騙系統,生成了單通道的真實、欺騙和混合信號,設置了不同的干信比和延時距離,并合成了多通道信號。通過仿真,分別在捕獲階段、跟蹤階段與定位結果階段驗證了該基于軟件的GNSS轉發式欺騙系統的正確性與可靠性。
軟件接收機;轉發式欺騙系統;C/A碼;干信比
Abstract:According to the basic theory about software receiver and retransmitted spoofing system,GNSS retransmit?ted spoofing system is designed based on software,a single channel of the real,spoofing and mixed signal,different jam?ming to signal ratio and delay distance is set and multi?channel signals are compounded.Through simulation,respectively in the acquisition,tracking and locating results periods,it verifies the correctness and reliability of GNSS retransmitted spoofing system based on software.
Key words:software receiver;retransmitted spoofing system;C/A Code;jamming to signal ratio
0 引言
當前,欺騙式干擾日益成為軍事對抗中的主流,欺騙式干擾的特點在于信號的發射功率相對較小,并且絕大部分GPS接收機都沒有檢測欺騙攻擊的能力。欺騙式干擾可以將目標接收機牽引至指定的位置,且具有較強的隱蔽性,不容易被敵方的軍用設備所察覺,對軍用設備與人員的安全具有較大影響。對此,抗欺騙技術的研究迫在眉睫。抗欺騙研究不僅能有效地應對現代戰爭中電子對抗的需要,提高我軍的軍事實力,還能提升我國的區域防御能力。為了更好地研究抗欺騙技術,需要使用欺騙信號模擬搭建一個轉發式的欺騙系統。該系統的搭建不僅可以為抗欺騙的研究提供數據支持,還可以對轉發式欺騙的相關特性的理論分析提供依據。
欺騙式干擾分為生成式欺騙和轉發式欺騙。生成式欺騙實現比較復雜且搭建的成本較高,而轉發式欺騙則以成本低廉和實現容易的特點受到廣泛關注。國內方面,王偉利用system?view仿真模擬了轉發式欺騙系統,黃龍等提出了一種針對GNSS授時接收機的轉發式欺騙干擾技術。目前,在轉發式欺騙里常用的轉發器通常影響范圍比較小,且對于各個通道的轉發延時距離是相同的,存在著一定的局限性。
本文在軟件接收機與轉發式欺騙系統基本理論的基礎上,通過對軟件接收機里的捕獲跟蹤環節進行研究,設計一個基于軟件的GNSS轉發式欺騙系統,實現GNSS欺騙信號模擬,即產生多通道合成的GNSS信號,且各通道時延與干信比強度可調,最后利用軟件接收機對仿真數據的正確性進行驗證。
1 轉發式欺騙系統的基本模型
在轉發式欺騙信號的干擾下,接收機接收到的不再是單一的真實信號,而是真實信號與欺騙信號的混合信號。因此,在欺騙式干擾下,接收機接收的信號模型可以表示為真實信號與欺騙信號的和:

式(1)中,Sau表示真實信號,Ssp表示欺騙信號,S表示混合信號。
其中,真實信號Sau是多顆衛星信號的和信號。式(2)中,表示第i顆衛星的真實信號。


則混合信號為真實信號與欺騙信號之和,即:

對于具體的信號,主要由數據碼、載波和C/A碼3個部分組成。信號的形式如式(5)、式(6)所示。

2 轉發式欺騙系統的構建
轉發式欺騙系統的搭建需要至少4顆衛星的信號提供相關信息,因此在設計過程分為3個步驟。首先完成對單通道信號的生成的研究,對每個通道都分別生成真實信號和帶有延時的欺騙信號;再通過調整幅值,來改變真實信號和欺騙信號的信號強度的大小關系,來生成不同干信比的混合信號;最后將每個通道的信號進行疊加,生成多通道的衛星信號。圖1是構建轉發式欺騙系統的整體流程圖。
2.1 真實信號的復現
真實信號的復現是基于衛星信號的捕獲與跟蹤的基本原理實現的。在捕獲階段,本地信號與接收機接收的GPS信號進行粗略對齊,這種對齊分為接收信號與本地C/A碼之間的粗略對齊、接收信號和本地載波的粗略對齊。在跟蹤階段,接收信號的C/A碼和本地C/A碼經過閉環控制系統的反饋校正后完全對齊,此時碼跟蹤環路穩定后的本地C/A碼與接收信號的C/A碼相同。同理,載波跟蹤環路穩定后的本地載波就與接收信號中的載波相同。
因而,本文研究的欺騙系統的真實信號的復現就以跟蹤后得到的本地C/A碼作為真實信號的測距碼,以跟蹤后得到的本地載波信號作為真實信號的載波,以跟蹤后解擴的導航數據作為真實信號的導航數據。真實信號的復現就可以用真實信號的載波乘以真實信號的C/A碼乘以真實信號的導航數據得到。將式(5)簡化得:
其中,Si(t)表示第i顆衛星信號的真實復現,Ci(t)表示跟蹤環路中真實復現的C/A碼,Wi(t)表示跟蹤環路中真實復現的載波,Di(t)表示接收機接收到的衛星信號經過解調解擴之后得到的數據碼。
真實信號的復現一方面可以檢驗該欺騙系統的設計是否正確,另一方面可以成為混合信號的一個支路與加入延時的欺騙信號進行混合。
2.2 欺騙信號的產生
欺騙信號的產生與真實信號的復現的生成原理十分相近,區別在于,欺騙信號的產生需要在C/A碼上加上對應的碼片延時。由捕獲跟蹤的基本原理可知,在C/A碼部分,接收機需要將本地復制的C/A碼與接收的衛星C/A碼相對齊,需要移動的相移量對應著信號從衛星發出到被接收機天線接收所需要的時間,記為延遲時間τi。
而欺騙信號的生成需要在τi的基礎上,增加一個Δτi,這一新變量的引入,會使得第i顆衛星的通道延時發生變化,最終影響多通道信號混合后的定位結果。下文給出衛星的延遲距離和偏移的碼片數、采樣點數之間的關系。
由于一個C/A碼的周期是1ms,設一個C/A碼周期里包含有1023個碼片,每個C/A碼碼片的采樣點數(記為m)就等于采樣頻率除以C/A碼頻率,所以總偏移的采樣點數就等于偏移的碼片數乘以每個碼片上的采樣點數m,則總偏移的采樣點數(記為Δk)所對應的時間就是 1/(1023×m)ms。而偏移距離等于偏移時間乘以光速c,如式(8)所示,這樣便可以根據用戶所設定的偏移距離,計算出所對應的碼片的偏移采樣點數。
當然,由于C/A碼極強的自相關性,本地生成的C/A碼與接收的C/A碼必須在一個碼片的間隔內,否則無法在捕獲環節完成相關運算。
跟蹤部分同樣使用的是超前滯后延遲鎖定環,本地的C/A碼生成器產生3個相差1/2碼片的超前、滯后、當前的本地復制碼。然后這3路的信號都與輸入信號進行第2次相乘得到3個相關的輸出結果,記為IP、IQ和IE。接著比較這3路結果和輸入信號,取出與輸入信號相關性最好的輸出結果,再進行調整,得到C/A碼的初始相位。
經過鑒相器的調整后,將當前碼與載波、導航數據相乘,最終得到欺騙信號。
2.3 混合信號的產生
在生成了單通道的真實信號與欺騙信號之后,需要將真實信號與欺騙信號進行混合。在實際的欺騙式干擾下,目標接收機接收的信號并非僅有欺騙信號,真實信號也同時會被接收機采集,而兩者功率的此消彼長會影響目標接收機最終的定位性能,因此需要設置真實信號和欺騙信號的功率比。對此,可以通過改變干信比來調整真實信號與欺騙信號的比例關系。干信比指的是欺騙信號與真實信號的功率比,單位是dB。由于信號的功率與幅值的平方成正比,設置干信比的方法可以從改變欺騙信號與真實信號的幅值入手。關于干信比與幅值的關系,推導如下。
可以將混合信號記為S,真實信號記為S1,欺騙信號記為S2,真實信號的增益為K1,欺騙信號記為K,則混合信號可以表示為:

令K1=1,則干信比等于:
通過以上的推導,可以通過干信比與幅值的關系,通過對每個通道的信號的干信比進行設置,轉化為對欺騙信號和真實信號的幅值進行設置,這樣便可以通過改變信號的幅值來改變整個欺騙系統的設置。
圖2是單通道軟件欺騙系統處理流程圖。
如圖2所示,經過解調和解擴后的單通道衛星信號,一方面將得到的載波、C/A碼和導航數據直接復現成真實信號;另一方面,將解擴后得到C/A碼經過相應的延時處理后,再與載波和導航數據一起生成欺騙信號,混合信號則等于真實信號與欺騙信號按一定干信比的比例相加之和。
軟件接收機處理的采樣點數非常多,很難一次性得到整個混合信號的數據,因此必須對欺騙系統的生成進行分段處理。采用的做法是每隔1ms讀取一次真實信號與混合信號的數據,然后按照式(3)的方法生成混合信號,接著繼續循環,直到生成所需要長度的混合信號。具體的混合信號生成流程圖如圖3所示。
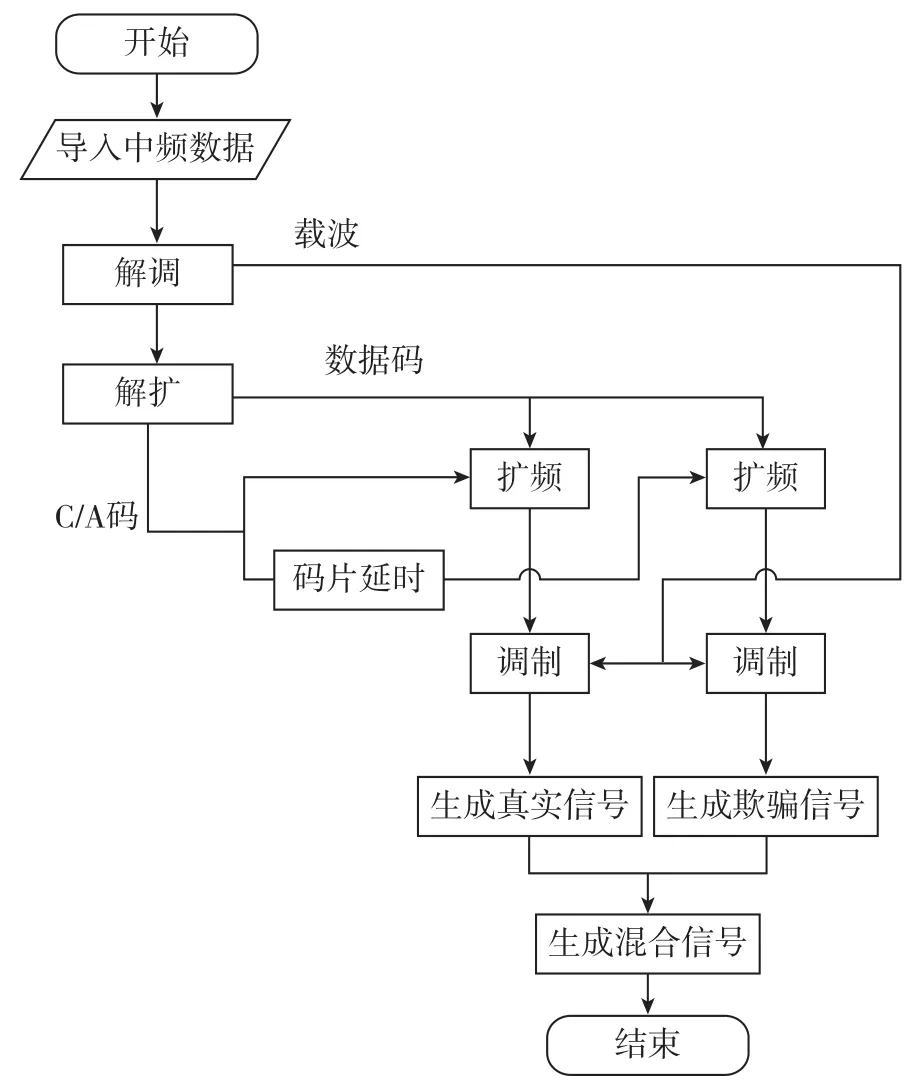
圖2 單通道軟件欺騙系統流程圖Fig.2 Flow chart of single channel software
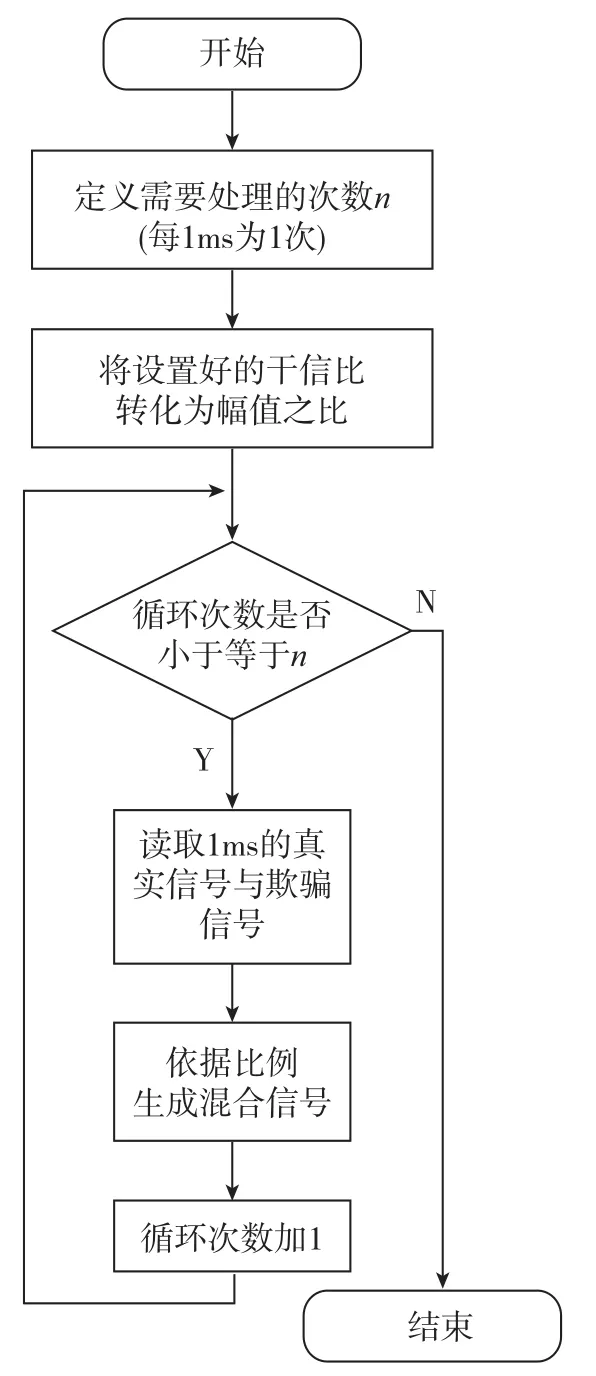
圖3 混合信號生成流程圖Fig.3 Flow chart of mixed signal generation spoofing system
2.4 多通道信號的生成
多通道信號的生成,需要基于單通道的真實信號、欺騙信號與混合信號已經生成的基礎。具體的多通道合成信號的示意圖如圖4所示。生成的欺騙信號要進行定位,至少需要4顆衛星信號才能解算出經緯高與鐘差,所以需要有4個通道的信號進行合成,圖4反映了4個單通道的信號S1、S2、S3和S4合成多通道信號的示意圖。當然實際應用中,合成多通道衛星個數可以大于4顆。

圖4 多通道信號合成示意圖Fig.4 Schematic diagram of the synthesis of multi?channel signals
由圖4的原理所示,不僅可以合成多通道的混合信號,還可以合成多通道的真實信號與多通道的欺騙信號。在多通道信號合成時,必須對每個通道信號的數據進行對齊。因為在軟件接收機中,為提高處理速度,每個通道的跟蹤環路每次處理的數據均為一個從0碼片至1022碼片的整C/A碼周期,即按各衛星信號的衛星鐘時間處理;而在信號混合時,需要將這些信號按統一的時鐘(接收機鐘)合成,因而需要對每個通道的數據進行調整,使它們從同一個時刻開始處理。
補齊后的信號在合成多通道信號的時候,依然需要仿照圖3所示的流程圖,以1ms為處理單元生成多通道信號,循環處理,直到得到需要的長度。
3 仿真驗證
仿真實驗中所使用的原始GPS數據包含PRN為9、15、18、21這4顆衛星信號,不考慮其他誤差影響,其定位結果認為是接收機真實位置。利用本文所提的欺騙模擬器,產生一組2min時長的欺騙干擾數據。其中,PRN為9、15、18和21時,偽距延時分別增加80m、90m、200m和100m,且干信比均為-6dB。根據該偏移量獲得的定位結果認為理論欺騙位置。利用軟件接收機,分析比較原始數據與欺騙式干擾數據的捕獲、跟蹤與定位結果,以驗證本文所提欺騙系統仿真器的正確性。
3.1 信號捕獲
圖5為軟件接收機針對原始信號與模擬的欺騙干擾信號的捕獲結果圖。可以看出,由于欺騙系統并不改變可見衛星情況,因此針對兩種數據,接收機捕獲的衛星的數量以及對應的衛星PRN值完全相同,均是PRN為9、15、18和22的衛星。
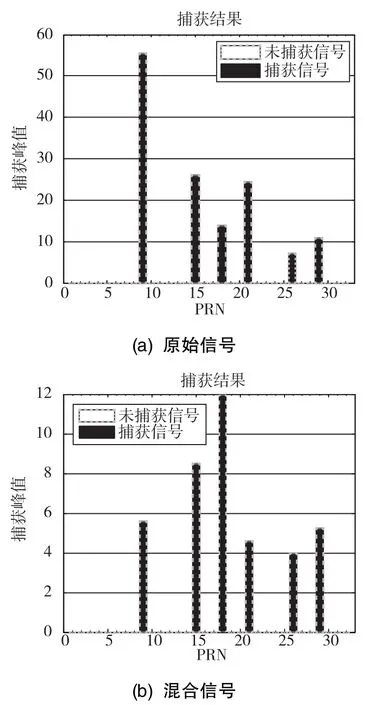
圖5 原始信號與生成的混合信號的捕獲結果圖Fig.5 Acquisition results of original signal and generated mixed signal
從圖5中也可以發現生成的信號與原始信號的捕獲度量值不同,該值與信號的信噪比相關,而該值變化主要是由于生成的數據和原始數據的噪聲環境不同,生成的數據中的噪聲比較少,因此捕獲度量值整體高于原始信號。
3.2 跟蹤部分
在跟蹤階段,可以通過自相關曲線進行分析,根據自相關的形狀來判斷是否生成了欺騙信號和真實信號。圖6(a)是標準的碼跟蹤相關曲線,可以看出,在延遲的碼片值等于0時,歸一化相關值為1,形狀為三角形。
而一旦相關器同時接收到了欺騙信號和真實信號,碼跟蹤的相關曲線就會呈現一個平頂的形狀,原因是真實信號與欺騙信號進行了疊加,兩個三角形的圖像由于碼相位不完全重合,疊加形成了一段平頂的圖像。由圖6(b)可以看出,歸一化的碼跟蹤相關曲線有一個平頂,可見欺騙信號和真實信號同時被跟蹤上,基本驗證跟蹤階段是成功的。
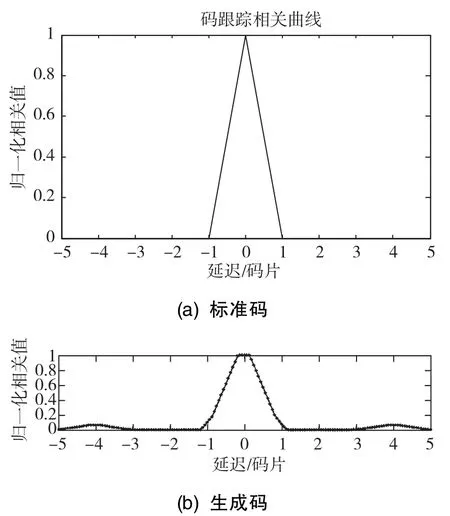
圖6 標準和生成數據的碼跟蹤相關曲線Fig.6 Code tracking correlation curve of standard and generated data
3.3 定位結果部分
在定位結算階段,可以將在經度、緯度、高度3個方向的坐標轉化為以用戶設定的位置為原點的E、N、U(東北天坐標系)下的距離變化情況。通過觀察真實信號在欺騙信號干擾下的變化情況,判斷轉發式欺騙在3個方向的欺騙效果,如圖7所示。東方向的真實信號與欺騙信號的變化距離為100m,混合信號的位置在真實信號與欺騙信號的位置之間,且更接近于真實信號的位置;北方向的真實信號與欺騙信號的變化距離為80m,混合信號的位置在真實信號與欺騙信號的位置之間,且更接近于真實信號的位置;東方向的真實信號與欺騙信號的變化距離為150m,混合信號的位置同樣在真實信號與欺騙信號的位置之間,且更接近于真實信號的位置。由于天方向的誤差比較大,精度相對比較低,基本滿足了要求。
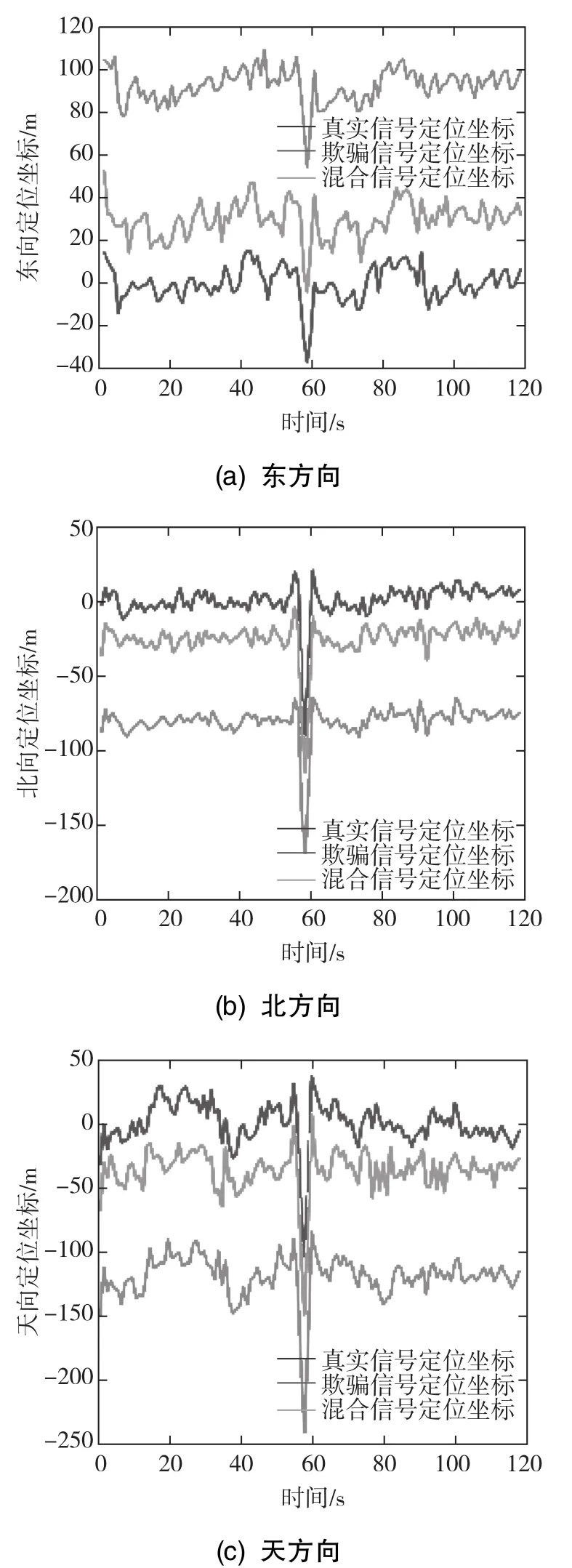
圖7 真實位置、欺騙位置與欺騙干擾結果Fig.7 Positioning results of true location,spoofing location,and mixed location
4 結論
本文提出了基于軟件的GNSS轉發式欺騙系統的具體實現方案,并通過仿真分析了在捕獲、跟蹤和定位階段的性能。仿真結果表明,此欺騙系統具有較好的準確性和可靠性。
后續擬將分析研究擴展到FPGA或者DSP上進行,以達到更好的欺騙效果,滿足各種場景下的GNSS欺騙干擾的應用。
[1]肖聰.無線電信號壓制性干擾研究與驗證[D].電子科技大學,2010.XIAO Cong.Discussion and verification of radio signal blanket iamming[D].University of Electronic Science and Technology of China,2010.
[2]王偉,陶業榮,王國玉,等.GPS欺騙干擾原理研究與建模仿真[J].火力與指揮控制,2009,34(6):115?118.WANG Wei,TAO Ye?rong,WANG Guo?yu,et al.Study and simulation of GPS deception jamming[J].Fire Control& Command Control,2009,34(6):115?118.
[3]黃龍,龔航,朱祥維,等.針對GNSS授時接收機的轉發式欺騙干擾技術研究[J].國防科技大學學報,2013,35(4):93?96.HUANG Long,GONG Hang,ZHU Xiang?wei,et al.Research of re?radiating spoofing technique to GNSS timing receiver[J].Journal of National University of Defense Technology,2013,35(4):93?96.
[4]閆占杰,吳德偉,劉海波,等.GPS轉發欺騙式干擾時延分析[J].空軍工程大學學報(自然科學版),2013,14(4):67?70.YAN Zhan?jie,WU De?wei,LIU Hai?bo,et al.Analysis of time?delay in GPS repeater deception jamming[J].Journal of Air Force Engineering University(Natural Science Edition),2013,14(4):67?70.
[5]袁超.應用于GPS軟件接收機的抗干擾技術研究[D].南京航空航天大學,2014.YUAN Chao.Application of GPS software receiver anti?in?terference technology research[D].Nanjing University of Aeronautics and Astronautics,2014.
[6]Ganguly S,Jovancevic A,Kirchner M,et al.GPS signal reconstitution[C].17thProceedings of International Tech?nical Meeting,the Satellite Division of the Institute of Nav?igation,2004:49?53.
[7]高志剛,孟繁智.GPS轉發式欺騙干擾原理與仿真研究[J].遙測遙控,2011,32(6):44?47.GAO Zhi?gang,MENG Fan?zhi.Principle and simulation research of GPS repeater deception jamming[J].Journal of Telemetry,Tracking and Command,2011,32(6):44?47.
[8]張翰林,張國定,劉寶.對現代化GPS的欺騙式干擾研究[J].光盤技術,2006(4):36?38.ZHANG Han?lin,ZHANG Guo?ding,LIU Bao.Research of modern GPS against deceiving jamming[J].CD Tech?nology,2006(4):36?38.
[9]王婷婷,王圣東,陳欣.GPS干擾與抗干擾技術發展現狀分析[J].指揮控制與仿真,2008,30(6):118?120.WANG Ting?ting,WANG Sheng?dong,CHEN Xin.A survey on development of GPS jaming and anti?jamming technology[J].Command Control& Simulation,2008,30(6):118?120.
[10]Tsui J B.Fundamentals of global positioning system re?ceivers:a software approach(2nd)[M].New York:John Wiley&Sons Inc,2005.
[11]費華連.導航戰中的GPS干擾與抗干擾技術[J].航空電子技術,2001,32(1):19?22+34.FEI Hua?lian.GPS interferenceand anti?interference technology in navigation war[J].Avionics Technology,2001,32(1):19?22+34.
[12]梁康.GPS干擾機的設計[D].武漢大學,2004.LIANG Kang.The design of GPS jammer[D].Wuhan U?niversity,2004.
A Software Approach to Realization of the Retransmitted GNSS?spoofing Simulator
DAI Wei?hao,XU Rui,LIU Jian?ye,DING Meng?yu,QI Ya
(Navigation Research Center,Nanjing University of Aeronautics and Astronautics,Nanjing 211106)
U666.1
A
1674?5558(2017)01?01368
10.3969/j.issn.1674?5558.2017.05.001
2017?01?16
國家自然科學基金青年基金(編號:61603181)
戴偉昊,男,碩士,導航、制導與控制專業,研究方向為GPS干擾與軟件接收機。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25