脈沖風洞天平動態標定加載系統設計
2017-09-29 02:38:03高宏力馬力翔黃曉蓉西南交通大學機械工程學院成都610031
中國工程機械學報 2017年3期
關鍵詞:系統
毛 潤,高宏力,馬力翔,黃曉蓉(西南交通大學 機械工程學院,成都 610031)
脈沖風洞天平動態標定加載系統設計
毛 潤,高宏力,馬力翔,黃曉蓉
(西南交通大學 機械工程學院,成都 610031)
由于脈沖風洞試驗時間短,沖擊載荷大,試驗過程有強烈振動,影響天平的測力精度,因此,需要對天平模型進行動態標定.針對風洞天平的動態標定所需要的高頻率、重載荷穩定的動態力,設計了一套動態力加載系統.機械結構運用電動機帶動絲杠副的結構設計,控制部分采取嵌入式PC,在系統內虛擬出軟PLC.傳感器檢測模塊和電動機驅動模塊等通過EtherCAT總線與軟PLC通訊,實現硬件的模塊化集成.經試驗測試,該系統能滿足風洞天平的測試要求.
風動天平; 動態標定; 嵌入式PLC
風洞天平模型試驗是航空航天飛行器研制過程了解飛行器性能、降低飛行器研制風險和成本的重要手段之一.隨著社會工業發展,風洞天平模型試驗越來越多地運用到汽車、高層建筑的受力測試當中.風洞天平則是直接感應和測量作用在模型6個自由度上氣動力、力矩的高精度測量裝置.國內外對風洞天平的研究大多數局限在靜態形式上,而對于動態力往往是采用“靜標動用”的方法進行,即僅依據計量器具靜態校準的數據結果作為動態測試的依據.其結果是,在靜態校準中精度很高的計量器具,在動態測試中卻可能出現高達100%的動態誤差[1].對于連續風洞,當試驗時間足夠長時,模型振動會逐漸衰減,最終測力天平能夠給出一個穩定的數值.但對于脈沖風洞(約300 ms),試驗時間很短,模型結構振動來不及衰減,測力天平的測量結果會受到很大的影響[2-3].因此,對于脈沖風洞天平的動態校準變得十分重要.動態校準則是在靜態校準的基礎上,利用標模,在風洞中進一步校驗天平性能的過程.一般情況,動態標定所用的力源為標準動態力源,標準動態力有穩定的頻譜,可以復制,易于分析[4].
目前,國內外對于風洞天平的動態標定實驗中采用的標準力加載機構,大多數采用脈沖式力源、正弦力源、階躍力源等形式進行加載.這些加載形式的原理、優缺點、應用范圍都不相同[5-6].表1為對各種力源裝置進行對比.
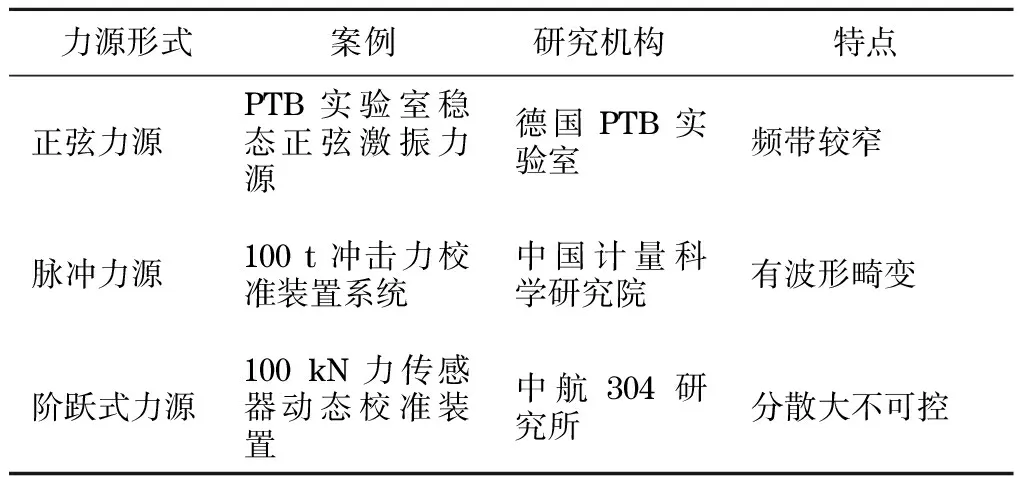
表1 各種力源裝置對比Tab.1 Comparison of each dynamic force equipment
綜上所述,這些設計最大的缺陷是不能兼顧各種標準力的輸出,通過分析論證,針對這些不足,設計出一套機構實現一系列標準動態力的輸出.該機構能實現不同動態力的輸出,成本較低,控制方便[7].
1 系統設計
如圖1所示,系統是由控制部分和機械部分組成.伺服電動機通過聯軸器連接絲杠滑臺來推動加載頭對待標定的天平進行施力作用.通過對電動機的不同控制來選擇施加動態加載力模式,可以施加正弦力、負階躍力、脈沖力.根據期望的輸出力設定電動機轉矩,同時根據期望輸出力的變化頻率設定力矩變化頻率,進而達到需要的動態力輸出.
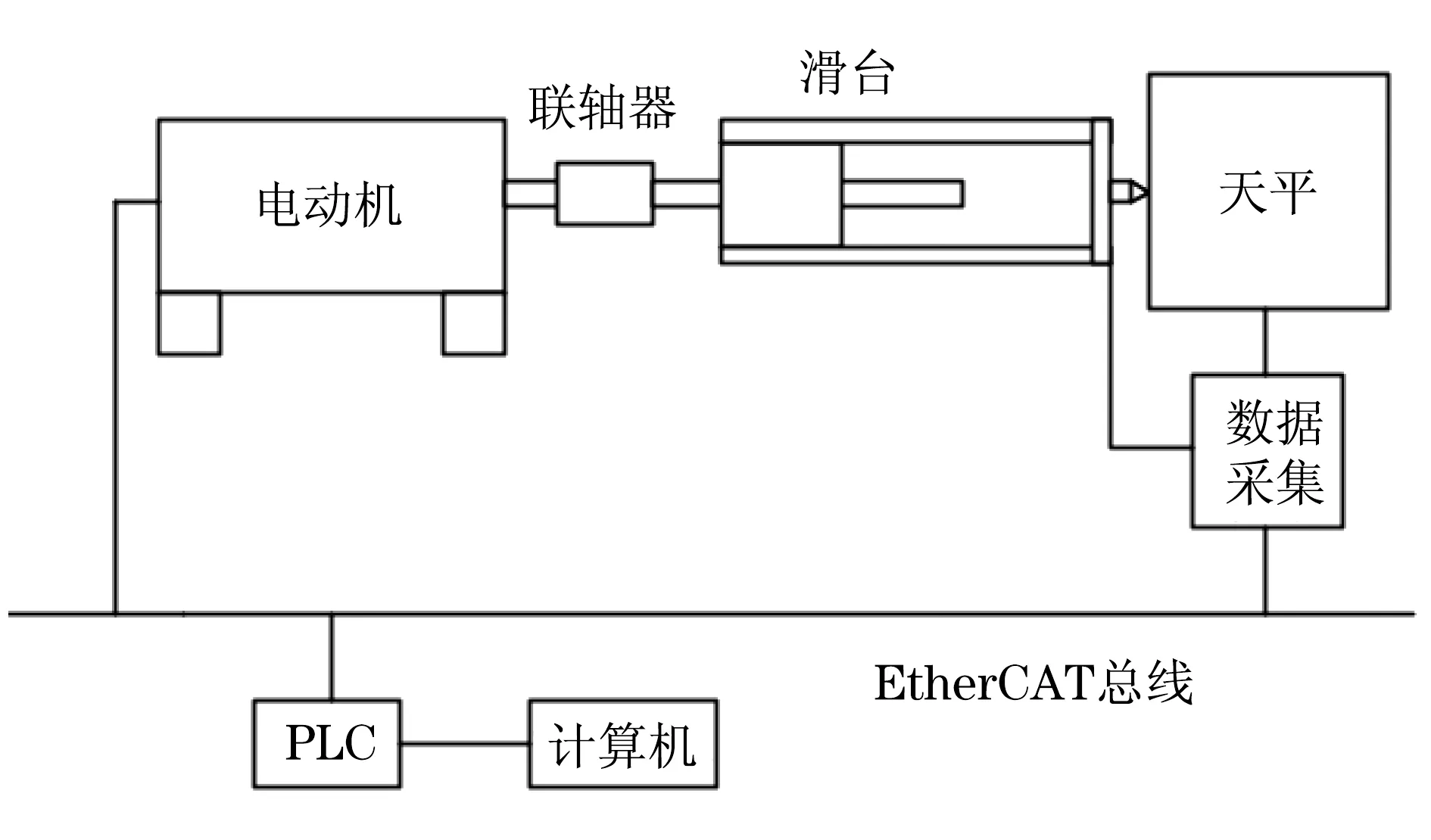
圖1 系統組成Fig.1 Composition of the system
1.1機械機構部分設計
如圖2所示,該機械機構部分是由兩個部分組成:電動機絲杠部分和力加載頭部分.電動機絲杠部分主要由電動機1、絲杠2、直線導軌3和導軌滑塊6組成.力加載頭部分主要由加載支架5和標準力傳感器4組成.

圖2 系統機械結構圖Fig.2 Mechanical structure of system
電動機1通過聯軸器帶動絲杠2轉動,絲杠2推動滑塊的直線動作,滑塊6上面安裝了加載頭,加載頭的頂部就是標準測力傳感器4,測力傳感器直接作用在天平上面.根據牛頓第三定律可知,標準測力傳感器和天平所受的力大小相等,方向相反且作用在同一直線上面,這樣就可以根據設計要求,通過控制電動機運動達到控制各種標準動態力輸出的目的.
1.2控制部分組成
如圖3所示,控制部分分為3部分:控制單元、輸入單元和輸出單元.控制單元采用BECKHOFF的CX1030嵌入式控制器,AX5000系列伺服驅動器CPU模塊,集成式快速控制技術電流控制周期最快可達31.25 μs,支持高速及高動態性定位任務.RS232串口以及具有E-bus接口的電源模塊.CX1030后端連接EtherCAT總線,EtherCAT高性能的系統通訊技術能夠與基于PC的控制技術理想結合,并支持與其他通訊系統之間的耦合.總線接數字量輸入輸出模塊、傳感器信號采集模塊和電動機驅動模塊等.由于控制器的運算頻率1.8 GHz,在控制器操作系統里虛擬一個軟PLC,數據采集處理和運動控制均由軟PLC完成.
2 PID控制算法設計
PID控制是工業控制中應用最為廣泛的控制方法[9].對于脈沖風洞天平的動態標定,要求加載力具有穩定的頻譜且可復制,但是因為機械結構的局限加上系統的擾動,嚴重影響加載系統的可靠性.在電動機的控制中,運用PID控制算法,可有效解決此問題.針對系統的設計要求,需要產生3種方式的動態加載力.各種加載力采用不同的控制算法,正弦加載需要運用電子凸輪,脈沖加載和負階躍加載則需要運用電動機的力矩模式.圖4為系統控制算法流程圖,其中ε為根據實際情況人為設定的閥值.
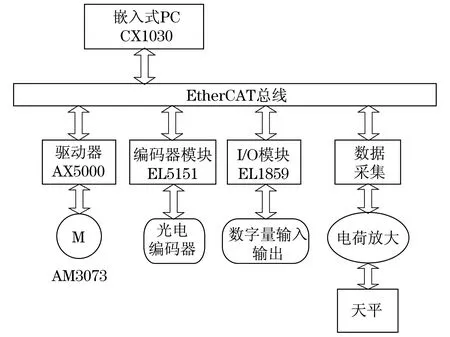
圖3 系統控制部分組成圖Fig.3 Composition of the control system
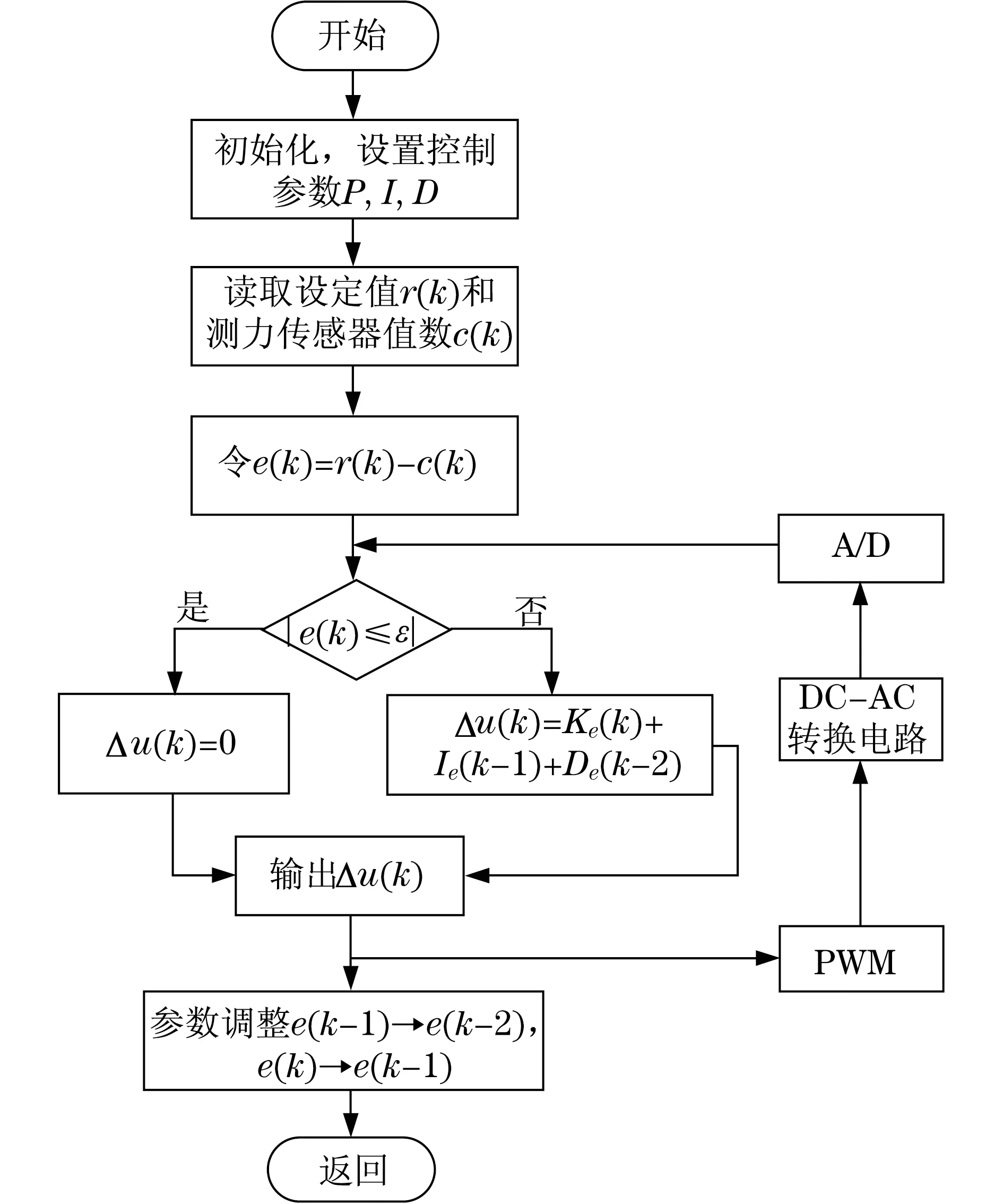
圖4 控制算法流程圖Fig.4 The flow chart of control algorithm
正弦力、脈沖力和階躍力的控制方式各不相同.正弦力是通過TwinCAT System Manager NC配置凸輪表,將正弦力轉化成電動機的力矩控制.負階躍力輸出時,首先電動機尋參后,將電動機轉成位置模式帶動加載頭向前以0.1 m/s的速度運動,當加載頭前面的標準力傳感器碰到風洞天平機構,產生一個電壓信號反饋給PLC后立刻做出指令,使電動機轉成轉矩模式.根據勻速狀態下電機絲杠轉矩和軸向力估算公式為

考慮10%的余量,給電動機設置的扭矩1.1Ta,此時加載頭和天平貼合,電動機堵轉t時間即可產生負階躍力.若需要產生脈沖力,當標準力傳感器達到所需力值Fa時,電動機反轉回原點.這個過程完成了脈沖力的輸出.
3 結果分析
試驗對象是天平動態標定試驗臺,通過對試驗臺的加載動作進行控制,來完成上述算法.編程硬件平臺選用德國倍福公司的工業PC-C6920,軟件平臺為TwinCAT3.0,該平臺支持Matlab編程.選取正弦加載方式在該平臺進行試驗,通過數據整定PID參數.試驗效果如圖5所示.

圖5 正弦力加載效果圖Fig.5 The performance of sine wave force
為了更加直觀地說明控制效果,對系統跟蹤誤差的均方根誤差(RMSE)進行測量計算:

式中:r為RMSE.結果說明,該算法能較好地實現施加力的控制,
4 結語
本文將嵌入式PLC應用在標準動態力加載機構上,實現了對傳感器數據的采集分析.與傳統力源裝置相比,該系統所采用的PC+現場總線+分布式I/O的體系結構,使系統硬件結構更簡單,控制方便,力輸出形式豐富.系統程序魯棒性較好,不同功能的程序在軟PLC里劃分為單獨的任務執行,實現軟件結構的模塊化.對發展和完善動態力值計量技術有著其重要的意義.標準動態力發生裝置是動態力值計量技術的最終反映.為了充分掌握動態力傳感器,尤其是大力值寬頻帶的動態力傳感器的動態特性,研制大力值寬頻帶的標準動態力發生裝置具有重要的意義.
[1] 何聞.標準動態力發生裝置國內外研究現狀[J].機電工程,1999(2):47-49.
HE W.The research status of standard dynamic force measurement systems[J].Mechatronics Engineering,1999(2):47-49.
[2] 呂金洲,張小慶,高宏力,等.脈沖燃燒風洞測力天平動力學建模與分析[J].噪聲與振動控制,2015(1):182-186.
Lü J Z,ZHANG X Q,GAO H L,et al.Structural dynamics modeling and analysis of the force balance for an impulse combustion wind tunnel[J].Noise and Vibration Control,2015(1):182-186.
[3] 張小慶,樂嘉陵,許明恒.超聲速脈沖風洞起動過程數值模擬[J].西南交通大學學報,2008(6):751-755.
ZHANG X Q,LE J L,XU M H.Numerical simulation of starting process of supersonic pulse wind tunnel[J].Journal of Southwest Jiaotong University,2008(6):751-755.
[4] KUMME R,DIXON M J.The results of comparisons between two different dynamic force measurement systems[J].Measurement,1992,10(3):140-144.
[5] Ling Dynamic Systems Ltd.Air-cooled vibration testing systems[R].1994.
[6] 莫建新,賈叔仕,程耀東.用跌落沖擊方法校準壓力傳感器的局限性[J].計量與測試技術,1993(5):11-14
MO J X,JIA S R,CHENG Y D.The limitation of using drop impact test the pressure sensor[J].Metrology & Measurement Technique,1993(5):11-14.
[7] CROSSWY F L,KALB H T.Investigation of dynamic rocket thrust measurement techniques[R].1967.
[8] 黃欽俊,王效葵,李行善,等.力傳感器的動態重復性、線性度與性能改進的研究[J].計量學報,1995,16(1):58-67.
HUANG Q J,WANG X K,LI X S.The research of dynamic repeabilit,linearity and performance improve on pressure sensor[J].Acta Metrologica Sinica,1995,16(1):58-67
[9] 張一文,高宏力,黃曉蓉,等.輪對標定試驗臺先進PID壓力控制的研究和應用[J].機械設計與制造,2015(8):153-155.
ZHANG Y W,GAO H L,HUANG X R,et al.Research and application for hydraulic loading in wheel load calibration test-bed based on advanced PID[J].Machinery Design & Manufacture,2015(8):153-155.
[10] 楊智,朱海鋒,黃以華.PID控制器設計與參數整定方法綜述[J].化工自動化及儀表,2005(5):1-7.
YANG Z,ZHU H F,HUANG Y H.The PID controller design and parameter setting method of review[J].Journal of Chemical Industry Automation and Instrument,2005(5):1-7.
[11] 劉金琨.先進PID 控制及其MATLAB仿真[M].北京:電子工業出版社,2003.
LIU J K.The advanced PID control and MATLAB simulation[M].Beijing:Electronic Industry Press,2003.
Dynamicforcemeasurementsystembasedonwind-tunnelbalance
MAORun,GAOHongli,MALixiang,HUANGXiaorong
(College of Mechanical Engineering,Southwest Jiaotong University,Chengdu 610031, China)
Since the short effective measurement time and the large impulsive load for the impulse combustion testing in wind tunnel,model system will vibrate intensively during the experiment,which will reduce the accuracy of force testing.In order to provide the dynamic forces which the experiment needs,we proposed a new dynamic force measurement system.The mechanical part was consist of a set of motor,leading screws and screw nuts.Meanwhile the control part was based on embedded soft PLC.The EtherCAT terminal boxes which are connected to the controller are used for detecting the signals from sensors and driving motors.The modular integrated hardware making the system more compact.Experiment shows that the system meet the requirement of wind-tunnel balance.
wind-tunnel balance; calibration accuracy; embedded PLC
TP 23
: A
: 1672-5581(2017)03-0244-04
毛 潤(1990—),男,博士生.E-mail:1101083246@qq.com
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32