基于模糊邏輯的EHB系統制動意圖識別
2017-09-25 02:10:37楊波,吳翔
自動化儀表 2017年9期
楊 波,吳 翔
(武漢理工大學汽車工程學院,湖北 武漢 430070)
基于模糊邏輯的EHB系統制動意圖識別
楊 波,吳 翔
(武漢理工大學汽車工程學院,湖北 武漢 430070)
隨著汽車電子技術的發展,線控技術日趨成熟。目前,電子機械制動(EMB)系統尚未成熟,電子液壓制動(EHB)系統成為線控制動系統的主力產品。EHB系統取消了制動踏板與制動總泵推桿之間的硬連接,通過傳感器測量駕駛員踩制動踏板的參數并傳輸給電子控制單元(ECU);ECU根據已設定的算法決定助力大小,對駕駛員的制動意圖進行識別。基于機械解耦電子液壓線控制動系統,提出了一種基于模糊邏輯的駕駛員緊急制動意圖識別方法。首先,利用NI-PXI的DAQmx采集卡采集制動踏板的位移,將制動踏板位移對時間求導得到制動踏板速度。然后,將制動踏板位移和速度作為模糊模式識別算法的輸入,判斷是否為緊急制動意圖:如果是緊急制動意圖,則制動輔助策略介入;否則制動輔助策略不介入,執行常規制動策略。最后,對汽車在典型工況下的緊急制動意圖進行硬件在環,通過對比仿真結果,驗證了制動意圖識別算法的有效性。該算法為今后EHB系統的制動意圖識別提供一定依據,有利于該eBooster系統的產品化。
電子液壓制動系統; 模糊模式識別; 硬件在環; 電子控制單元; 制動踏板位移; 模糊辨識模型
0 引言
隨著汽車電子技術的發展,汽車線控技術也日趨成熟,先后出現了線控轉向系統、油門以及制動系統等[1]。線控制動系統基于線控技術與汽車制動技術,已經成為汽車制動技術的主要發展趨勢。其中,線控制動系統又分為電子機械制動(electro mechanical braking,EMB)系統和電子液壓制動(electro hydraulic braking,EHB)系統[2]。根據國家法規要求,在常規制動系統失效的情況下,需要后備制動系統,EMB系統對現有車輛的制動系統改動較大,而且建立后備制動系統比較難,因此課題組設計了一套完全機械解耦的EHB系統。eBooster 3D模型如圖1所示。
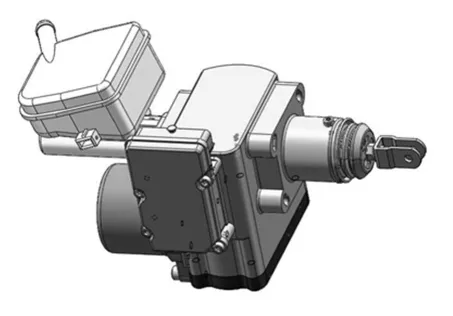
圖1 eBooster 3D模型
本系統中,在常規制動模式下,駕駛員施加給制動踏板的踏板力與制動主缸推桿之間是完全解耦的,這時就需要利用傳感器監測駕駛員踩制動踏板動作的各種信號,并傳輸到電子控制單元(electronic control unit,ECU);利用寫入的算法,判斷駕駛員的實際制動意圖,然后根據駕駛員制動意圖,控制電機控制器和制動防抱死系統(antilock bake system,ABS)協同工作,調節各個輪缸的壓力,實現車輛制動。
調查結果表明,在單車道汽車碰撞事故中,78%的駕駛員沒有采用最大的制動踏板力進行制動;在路面突然出現障礙物而引發的緊急制動過程中,47%的駕駛員沒有用最大的制動踏板力進行制動[3]。由此可見,如果在駕駛員要實施緊急制動時,汽車制動系統能夠識別出駕駛員的制動意圖,并實施對應的控制策略,可以縮短制動系統的響應時間,從而有效提高制動安全性[4]。電動汽車的制動能量回收是通過驅動電機給動力電池充電,但是制動能量回收的能量(再生制動力)不足以滿足駕駛員的制動能量需求,這時就需要液壓制動系統提供額外的制動力。同時整車控制器(vehicle control unit,VCU)也是根據駕駛員的制動意圖,對再生制動力和液壓制動力進行協調控制[5]。
1 制動意圖的辨識
1.1 制動意圖的識別參數選擇
1.1.1 制動踏板位移
駕駛員踩制動時,制動油壓和踏板位移之間有相對確定的關系,即有P=f(s),制動器制動力與制動管路的壓強滿足如下關系:
(1)
式中:i為各個車輪(1、2、3、4分別代表左前輪、右前輪、左后輪、右后輪);Di為制動輪缸直徑;ri為等效制動力作用半徑;Ri為車輪直徑;ui為摩擦片的摩擦副。
制動強度可以表示為:

(2)
式中:z為制動強度;F為制動力;m為車輛質量;g為重力常數。
由制動強度的表達式可以得到制動力F與s的確定關系。某車型的制動油壓和踏板位移之間關系如圖2所示。
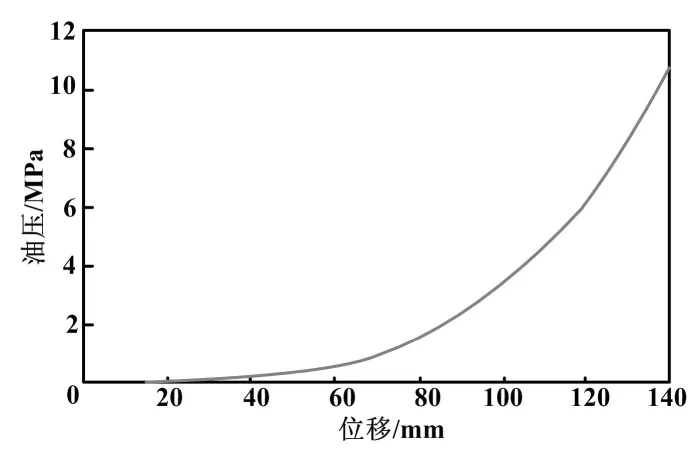
圖2 位移與油壓關系曲線
1.1.2 制動踏板速度
試驗中,駕駛員根據自己的駕駛習慣,得到了多組常規制動和緊急制動的踏板速度時間曲線。試驗得到的制動踏板的位移與速度關系曲線如圖3所示。
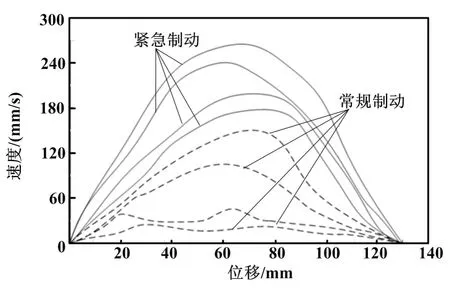
圖3 位移與速度關系曲線
由圖3可以看出,兩種不同的制動模式分別對應了一個較為明確范圍的制動踏板速度,所以可以把制動踏板速度作為制動意圖識別的輸入參數。
1.1.3 制動踏板力
對駕駛員而言,踏板位移的大小是可以容易地控制的,但是踏板力的大小不好操控。此外,可以很容易地通過安裝踏板位移傳感器獲得踏板位移信號,并且踏板位移信號的間隙較小。相反,因為踏板力傳感器的間隙較大,無法獲取小踏板力時的踏板力信號,且實時性不高,所以一般不采用制動踏板力信號作為駕駛員制動意圖識別的參數[6]。
1.2 制動意圖的分類及特征
由于本文模糊辨識器主要用于緊急制動意圖的辨識,所以把制動意圖分為常規制動意圖、緊急制動意圖[7]。制動意圖分類及特征如表1所示。
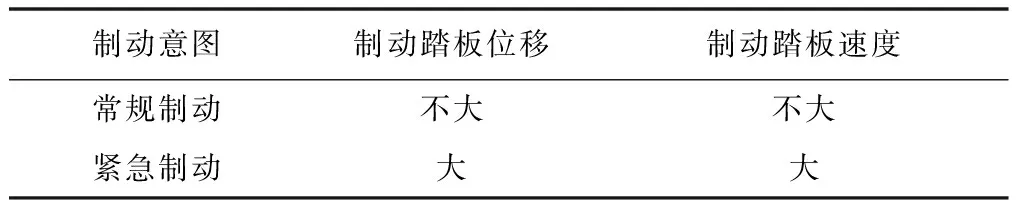
表1 制動意圖分類及特征
1.3 制動意圖的辨識方法
駕駛員制動意圖辨識的過程就是利用模糊辨識結合統計學的方法,通過分析大量的實車試驗工況數據,找到制動踏板位移、制動踏板速度與制動減速度三者之間的統計學關系。利用LabVIEW自帶的模糊系統設計器工具箱建立模糊辨識器,從而實現通過制動踏板位移、制動踏板速度來判斷駕駛員的制動需求,進而實現對制動意圖的準確、實時辨識。駕駛員制動意圖識別流程如圖4所示。

圖4 制動意圖識別流程圖
1.4 模糊推理模型的建立
模糊推理模型的建立過程如下。
①對制動踏板位移、制動踏板速度進行模糊化操作,以便對駕駛員制動意圖進行識別。設踏板位移為制動踏板位移(brake pedal displacement,BPD),其基本域廣義確定為[0,100],將制動踏板位移基本域分為S(small)、M(medium)、B(big)三個等級;制動踏板速度(brake pedal velocity,BPV)的基本域廣義確定為[0,200],將基本域同樣分為S、M、B三個等級。
②確定模型輸入、輸出變量的隸屬度函數,如圖5所示。在實際應用中,常用的隸屬度函數為簡單的直線型隸屬度函數,如三角函數、梯形和單直線型函數,本文選用梯形-三角-梯形隸屬度函數。圖5(a)、圖5(b)、圖5(c)分別為模糊控制系統的制動踏板位移輸入、制動踏板速度輸入和制動模式輸出隸屬度函數。
③建立模糊控制規則庫。表2為本系統模糊控制規則狀態表。表2中:Flag為識別出來的制動意圖;S狀態、M狀態為常規制動;B狀態為緊急制動[8]。
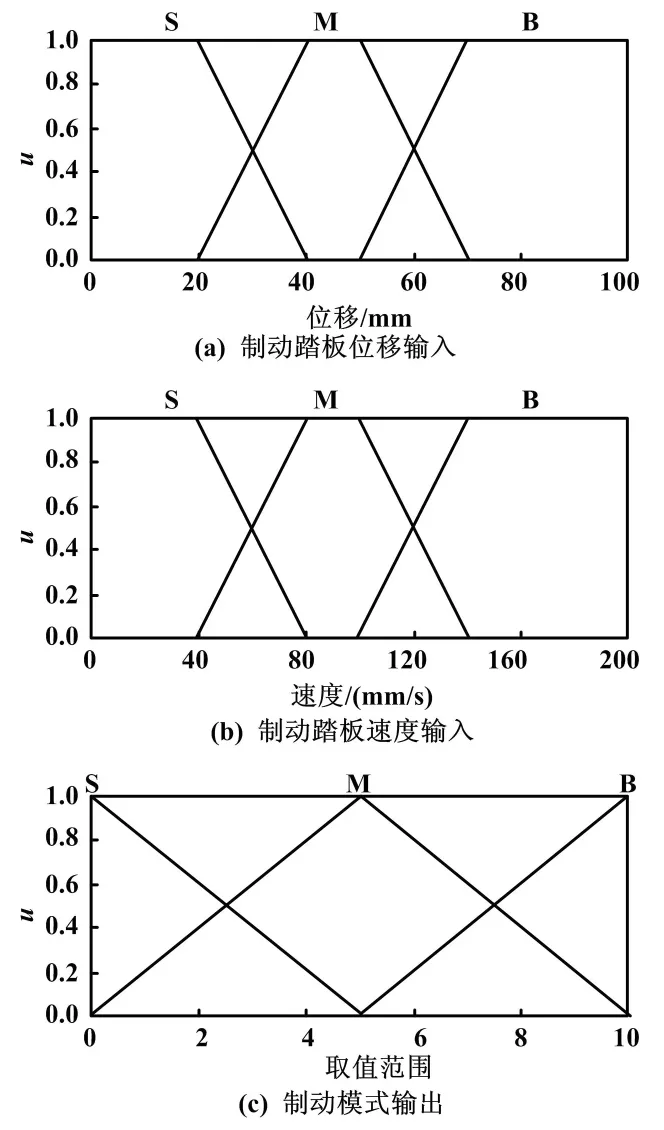
圖5 輸入、輸出變量的隸屬度函數圖
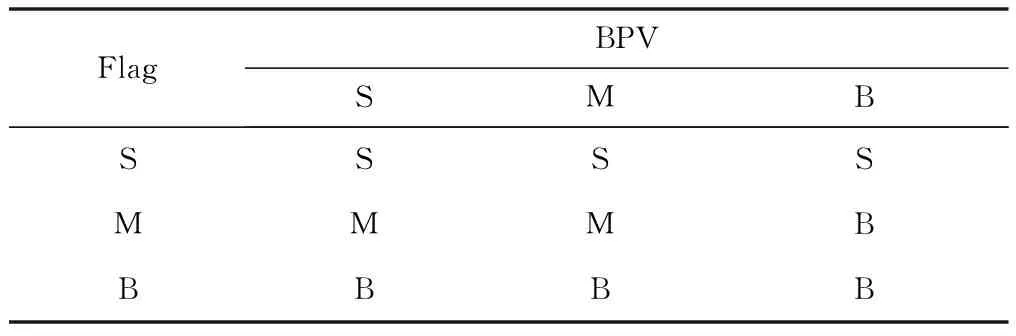
FlagBPVSMBSSSSMMMBBBBB
模糊推理結果需要解模糊化后才能進行控制。常用的解模糊方法有最大隸屬度法、重心法和加權平均法。本文選用重心法進行解模糊運算,按表2設定的模糊控制規則表,完成模糊辨識器的搭建,保存為可供LabVIEW中控制與仿真模塊的模糊系統設計器調用的FS格式[9]。利用模糊系統設計器中的測試系統模塊,生成制動踏板位移、制動踏板速度和制動模式的三維關系圖,改變制動踏板位移和制動踏板速度的輸入值。模糊控制器采用LabVIEW附加模糊工具包實現。控制器所用函數主要有多輸入單輸出(multi input single output,MISO)模糊控制函數、模糊隸屬度函數和模糊控制規則載入函數(fuzzy control rules loading function,FCRLF)。解模糊方法采用重心法。模糊控制器將制動踏板速度和制動踏板位移捆綁一個二維數組,并將其作為系統的輸入;用模糊控制規則載入函數將設定的模糊規則導入到模糊控制函數中,并分析系統的輸入,得到系統的輸出;再通過標定的子VI,得到對應的輸出。在模糊控制器主程序中,模糊控制器以子VI的形式出現[10]。
2 硬件在環仿真及結果分析
2.1 硬件在環
本文通過NI-DAQmx板卡聯合SCB-68接線盒,采集制動踏板上角位移傳感器信號。采用LabVIEW對角度進行標定得到實際的制動踏板位移,然后將制動踏板位移對時間求導得制動踏板速度,最后將制動踏板位移和制動踏板速度構建一個數組,輸入到模糊辨識器。
當Flag=0時,按照常規制動,由踏板位移特性曲線得到目標制動壓力,然后通過控制器局域網(coutroller area network,CAN)把目標制動壓力傳送給EHB系統的電機控制器,通過控制電機來推動制動總泵活塞推桿,建立液壓制動力;當系統檢測到Flag=1時,判斷為緊急制動,通過CAN將最大目標制動壓力直接發送給電機控制器,快速建立液壓。
2.2 仿真結果分析
本文設計了兩組硬件在環試驗,試驗結果如圖6所示。
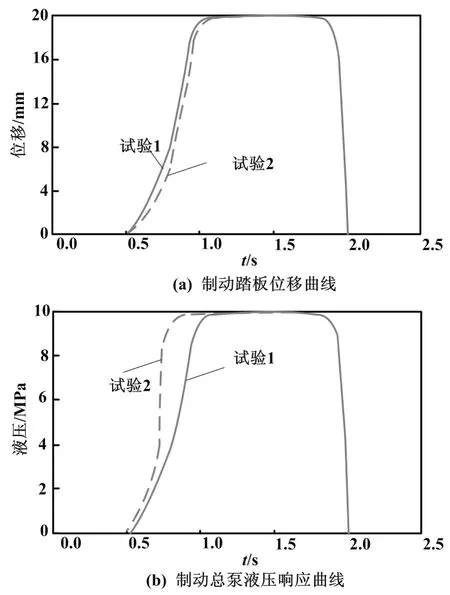
圖6 硬件在環試驗結果
第一組試驗,沒有模糊辨識器。圖6(b)中的試驗1制動總泵液壓制動力隨著圖6(a)中的試驗1制動踏板位移的增加而增加,而且表現出一個近似線性的關系。決定制動總泵液壓力大小的是制動踏板位移,與制動踏板速度無關。第二組試驗,有模糊辨識器。在和第一組試驗類似的踏板位移輸入的情況下,制動總泵液壓響應曲線明顯不同,圖6(b)中的試驗2制動總泵液壓制動雖然也是隨著圖6(a)中的試驗2制動踏板位移的增加而增加。但是在當制動踏板位移和制動踏板速度都比較大時,圖6(b)中的試驗2制動總泵液壓制動力建立的速度明顯快于圖6(b)中的試驗1,所以能在更短的時間內,達到最大制動壓力。因此在緊急制動情況下對駕駛員意圖的識別,減少了制動的響應時間,進一步縮短了制動距離,因而降低了事故發生的可能性,提高了駕駛的安全性。
3 結束語
本文提出了一種基于模糊邏輯EHB制動系統緊急制動意圖識別方法,首先將制動踏板和制動踏板的變化量模糊化,輸入給模糊辨識器;模糊辨識器讀取制定的模糊識別規則,對結果進行去模糊化,對駕駛員的緊急制動意圖進行識別。對乘用車進行了典型工況下緊急制動過程的仿真,仿真結果驗證了模糊辨識器的有效性。通過分析硬件在環仿真結果可知:在本套EHB系統中使用該模糊辨識器,能有效地識別駕駛員的緊急制動意圖,縮短緊急制動情況下液壓制動力建立的時間,提高了制動的安全性。
[1] AKIHIRO O,AKIRA S,TATSUSHI T,et al.Development of regenerative system for hybrid vehicle[J].SAE Papers,1999(10):62.
[2] 楊萬慶.電子液壓制動系統EHB綜述[J].城市車輛,2007(6):43-45.
[3] 康梅.東風標致307緊急制動輔助系統[J].汽車維修技師,2005(12):22-24.
[4] 孫磊.HEV駕駛員制動意圖識別及控制算法研究[D].長春:吉林大學,2012.
[5] 張元才,余卓平,徐樂,等.基于制動意圖的電動汽車復合制動系統制動力分配策略研究[J].汽車工程,2009,31(3):244-249.
[6] 王英范,寧國寶,余卓平.乘用車駕駛員制動意圖識別參數的選擇[J].汽車工程,2011(3):213-216.
[7] 孫逸神.基于模糊邏輯的制動意圖離線識別方法研究[J].北京汽車,2009(6):21-23.
[8] 劉磊,劉樹偉.駕駛員制動意圖辨識的方法研究[J].農業裝備與車輛工程,2015(11):27-30.
[9] 張玉潔.基于CarSim的電動助力轉向系統仿真與硬件在環驗證[D].合肥:合肥工業大學,2015.
[10]張文廣.基于LabVIEW的轎車ABS控制策略仿真研究[D].西安:長安大學,2013.
IdentificationofBrakingIntentionofEHBSystemBasedonFuzzyLogic
YANG Bo,WU Xiang
(School of Automotive Engineering,Wuhan University of Technology,Wuhan 430070,China)
With the development of automotive electronic technology,the technology of wire control technology has become more and more mature.Because the electro mechanical braking (EMB) system is not yet mature enough,so the electro hydraulic braking(EHB) has become the major product of the wire controlled brake system.In EHB system,the hard connection between the brake pedal and the brake master cylinder push rod is eliminated; the parameters related to the actions of driver are measured by sensor and sent to the ECU.According to the established algorithm,the force aided is decided by ECU,while it is necessary to identify the intention of driver.Based on the design of the mechanical decoupling electro hydraulic wire collected control system,the identification method based on fuzzy logic is proposed.Firstly,the displacement of brake pedal is collected by using DAQmx acquisition card of NI-PXI,and the time derivative of the brake pedal is conducted to obtain the velocity of the pedal.Then,the displacement and velocity of the pedal are input to the fuzzy identification algorithm to judge if it is the intention for emergency braking or not,thus to select if the braking aids strategy will be involved or not.Finally,the emergency braking intention of the vehicle under the typical operating conditions is carried out in the hardware,and the simulation results are given to verify the effectiveness of the algorithm.The method provides a basis for the identification of braking intention of EHB system in the future,and is conducive to the production of the eBooster system.
Electro-hydraulic braking (EHB) system; Fuzzy pattern recognition; Hardware in the loop; Electronic control unit; Brake pedal displacement; Fuzzy recognition model
TH86;TP273
: A
10.16086/j.cnki.issn1000-0380.201709006
修改稿收到日期:2017-03-22
楊波(1975—),男,博士,副教授,主要從事汽車動力學方向的研究。E-mail:yangbo92@126.com。
猜你喜歡
車主之友(2022年6期)2023-01-30 07:58:16
工業設計(2022年8期)2022-09-09 07:43:20
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
黃河之聲(2019年23期)2019-12-17 19:08:43
汽車實用技術(2019年17期)2019-09-21 03:46:32
家庭影院技術(2017年9期)2017-09-26 03:41:45
黃河之聲(2017年13期)2017-01-28 13:30:17
