分布式發(fā)電配電網(wǎng)故障區(qū)段定位新方法
2017-09-23 03:02:01郭玉雯
計算機(jī)應(yīng)用與軟件 2017年9期
郭 玉 雯
(遼寧工程技術(shù)大學(xué)電氣與控制工程學(xué)院 遼寧 葫蘆島 125105)
分布式發(fā)電配電網(wǎng)故障區(qū)段定位新方法
郭 玉 雯
(遼寧工程技術(shù)大學(xué)電氣與控制工程學(xué)院 遼寧 葫蘆島 125105)
針對分布式電源引入配電網(wǎng)中會造成傳統(tǒng)的故障區(qū)段定位方法不再適用的情況,構(gòu)建動態(tài)適應(yīng)多個分布式電源投切的開關(guān)函數(shù),且利用該開關(guān)函數(shù)的特點可以簡化運(yùn)算,提高定位效率。同時,針對蟻群算法容易出現(xiàn)早熟收斂的問題,引入混合優(yōu)化算法,提出基于混合優(yōu)化算法的分布式發(fā)電配電網(wǎng)故障定位方法。該算法利用粒子群算法優(yōu)化蟻群算法中的相應(yīng)參數(shù),采用全局異步與精英策略相結(jié)合的信息素更新方式和降低粒子維度的方法降低出現(xiàn)局部最優(yōu)解的概率,提高了收斂速度和定位結(jié)果的正確率。通過典型算例對含分布式電源的配電網(wǎng)進(jìn)行仿真,實驗結(jié)果表明該算法能夠?qū)我还收虾投嘀毓收蠝?zhǔn)確定位,且耗時少、容錯能力強(qiáng)。
分布式電源 配電網(wǎng) 混合優(yōu)化算法 開關(guān)函數(shù)
0 引 言
在配電網(wǎng)中,快速準(zhǔn)確地對故障區(qū)段進(jìn)行定位是隔離與恢復(fù)非故障區(qū)域正常供電狀態(tài)的前提。目前,利用FTU(Feeder Terminal Unit)搜集的信息進(jìn)行故障定位的人工智能算法主要包括蟻群算法[1-2],遺傳算法[3-5]以及和聲算法[6-7]等。其中,利用蟻群算法進(jìn)行配電網(wǎng)故障定位的核心就是旅行商問題,針對該問題的研究已經(jīng)獲得了大量成果。由于蟻群算法運(yùn)行初期信息素匱乏及參數(shù)選擇不當(dāng),其收斂速度慢,導(dǎo)致“早熟收斂”發(fā)生。針對該問題,文獻(xiàn)[8-9]提出的基于粒子群優(yōu)化的蟻群算法提高了收斂速度,但需要進(jìn)一步提高收斂速度才能使算法達(dá)到最優(yōu)狀態(tài),有待進(jìn)一步研究。
目前,分布式發(fā)電正逐漸廣泛應(yīng)用于配電網(wǎng)中,而分布式電源的投切會造成配電網(wǎng)由單電源輻射式變?yōu)槎嚯娫摧椛涫絒10-12],同時線路潮流也會發(fā)生變化,對配電網(wǎng)故障定位結(jié)果的正確率產(chǎn)生影響。因此,為了適應(yīng)這些變化需要對定位數(shù)學(xué)模型進(jìn)行改進(jìn)。文獻(xiàn)[1]對開關(guān)函數(shù)和評價函數(shù)的構(gòu)造進(jìn)行了改進(jìn),能夠?qū)Χ嚯娫淳W(wǎng)絡(luò)復(fù)雜故障進(jìn)行定位,但未考慮分布式電源投切的影響,并且正方向不一致,需要多次設(shè)定方向。文獻(xiàn)[13]考慮了分布式電源投切對配電網(wǎng)結(jié)構(gòu)產(chǎn)生的影響,但只適用于結(jié)構(gòu)簡單的配電網(wǎng),使用范圍受限。
針對上述情況,對配電網(wǎng)故障區(qū)段定位模型中的開關(guān)函數(shù)和正方向的規(guī)定方法在適應(yīng)分布式電源的投切,提高計算效率方面做了修整。并且,為了使收斂速度更快,算法陷入局部收斂的可能性更小,提出了一種基于蟻群粒子群混合優(yōu)化算法的配電網(wǎng)故障區(qū)段定位方法。該方法利用改進(jìn)的數(shù)學(xué)模型進(jìn)行定位,在降低粒子群算法中粒子維度的同時實現(xiàn)系統(tǒng)參數(shù)的優(yōu)化,進(jìn)一步縮短定位時間,有效抑制“早熟收斂”現(xiàn)象的發(fā)生。
1 混合優(yōu)化算法原理
1.1 蟻群算法
蟻群算法擅長離散優(yōu)化問題的解決,已經(jīng)成功運(yùn)用到了TSP問題中,蟻群算法利用旅行商問題與螞蟻搜集食物過程的相似性,即通過個體相互協(xié)作與信息交互所尋求的蟻穴至食物源的最優(yōu)路徑進(jìn)行配電網(wǎng)故障區(qū)段定位。

(1)
其中,螞蟻j下一步可以到達(dá)的城市為allowekj,allowekj={1,2,…,n}-tabuj;螞蟻j走過的城市用集合tabuj表示,其將會隨著螞蟻的搜索進(jìn)程的不斷變化作出調(diào)整。ηab即由地點a轉(zhuǎn)移到地點b的期望程度,根據(jù)某些啟發(fā)式算法或問題的具體情況進(jìn)行確定。α、β分別表示螞蟻在運(yùn)動過程中累積的信息量以及期望信息在螞蟻所經(jīng)路徑的作用,α及β與蟻群算法性能密切相關(guān)。之前留下的信息素的濃度會隨時間逐漸降低,用1-ρ表示信息素濃度的衰減情況,n個時刻為一個周期,信息素濃度調(diào)整公式如下:
τab(t+n)=ρτab(t)+Δτab
(2)
(3)

(4)
其中,一次循環(huán)中,Q為螞蟻在所能釋放出的總信息量且為常數(shù),螞蟻j所經(jīng)過的路徑長度為Lj。
由式(3)和式(4)可知,信息素的分布情況與保證蟻群算法的求解質(zhì)量息息相關(guān),所以,選擇恰當(dāng)?shù)男畔⑺馗路绞接葹橹匾M瑫r,蟻群算法參數(shù)的選擇依賴于實驗者的個人經(jīng)驗,若出現(xiàn)參數(shù)選取不當(dāng)?shù)那闆r,會出現(xiàn)“早熟收斂”問題,制約了蟻群算法的最佳性能。需要對其參數(shù)優(yōu)化過程進(jìn)行改進(jìn)。
1.2 粒子群算法
粒子群算法以多次迭代的方法搜索最優(yōu)解,初始化為隨機(jī)粒子,以后每次迭代中通過跟蹤個體極值(當(dāng)前單個粒子所尋找到的最優(yōu)解)和全局最優(yōu)解(當(dāng)前所有粒子整體所尋找到的最優(yōu)解)來不斷更新自身搜索到的解,個體極值用g表示,全局最優(yōu)解用q表示。第i個粒子的速度更新方程和位置更新方程如公式所示:
(5)
(6)

粒子群算法綜合利用種群信息和個體經(jīng)驗更新粒子的速度和位置,擅長連續(xù)優(yōu)化問題的解決,依賴經(jīng)驗參數(shù)少,能快速逼近最優(yōu)解。但其進(jìn)行全局優(yōu)化時容易出現(xiàn)早熟收斂,局部尋優(yōu)能力差等,主要原因為種群搜索空間中多樣性的減少。為此,結(jié)合1.1節(jié)中的結(jié)論可以得出利用粒子群算法依賴經(jīng)驗參數(shù)少,能快速逼近最優(yōu)解的優(yōu)點與對蟻群算法相結(jié)合,吸收這兩種算法的優(yōu)點達(dá)到快速準(zhǔn)確對故障定位的目的。
1.3 混合優(yōu)化算法
蟻群粒子群混合優(yōu)化算法使用蟻群算法進(jìn)行搜索,用粒子群算法對蟻群算法中的參數(shù)進(jìn)行優(yōu)化,降低純蟻群算法陷入局部最優(yōu)解的概率。為了保證蟻群算法求解質(zhì)量,選擇全局異步結(jié)合精英策略的信息素更新方式。為了隨時更新參數(shù),粒子的位置每變化一次,便要反饋到蟻群算法中,將粒子當(dāng)前的位置信息賦值給α-β及ρ。粒子迭代數(shù)次,直至不再出現(xiàn)更優(yōu)解,則當(dāng)前最優(yōu)粒子的位置坐標(biāo)為全局最優(yōu)解,將其反饋到蟻群算法中后優(yōu)化完畢,評價函數(shù)的最小的值即為最優(yōu)解。迭代終止條件選為粒子群目前搜索到的q滿足最小預(yù)定適應(yīng)閾值。 混合優(yōu)化算法的步驟如下:
1) 粒子速度和位置參數(shù)的初始化。初始化一定數(shù)量的二維粒子群粒子,粒子初始速度的每一維均對應(yīng)一個矢量速度,且均隨機(jī)產(chǎn)生:
vi={vα-β,vρ}
(7)
粒子的位置由蟻群算法中的兩個參數(shù),分別為“混合啟發(fā)因子”α-β、信息素?fù)]發(fā)度ρ表示,兩個參數(shù)的意義與式(1)中的相同:
xi={α-β,ρ}
(8)
2) 參數(shù)值反饋。調(diào)用蟻群算法,將當(dāng)前粒子群的參數(shù)反饋給它,并進(jìn)行迭代循環(huán)以得到最優(yōu)解。在其被調(diào)用的過程中采用全局異步結(jié)合精英策略的信息素的更新方式改善求解質(zhì)量。根據(jù)配電網(wǎng)故障定位的特點,將蟻群算法的迭代代數(shù)(蟻群算法的一次迭代指所有螞蟻便利所有地點并釋放信息素的過程)限制在5以內(nèi),提高算法的搜索速度。通過最優(yōu)解評價粒子所處的位置,根據(jù)評價結(jié)果更新粒子的位置及速度,位置和速度更新公式如式(9)和式(10),信息素更新方式如式(11)和式(12)所示:
(9)
(10)
(11)
(12)

2 配電網(wǎng)故障區(qū)段定位模型
2.1 開關(guān)函數(shù)
開關(guān)函數(shù)用來表示各個分段開關(guān)與線路區(qū)段的關(guān)聯(lián)關(guān)系,當(dāng)根據(jù)配電線路上FTU上傳的各個分段開關(guān)的故障電流信息來確定具體故障線路區(qū)段時,所利用的便是這種關(guān)聯(lián)關(guān)系。進(jìn)行區(qū)段定位時,每個測控點對應(yīng)TSP中的一個地點,應(yīng)用開關(guān)函數(shù)求解各測控點狀態(tài)值的過程中從末測控點(包括分布式電源)向系統(tǒng)電源搜索,在這個過程中依次確定各測控點的運(yùn)行狀態(tài)值。對于含分布式電源的配電網(wǎng)故障定位時的正方向規(guī)定如下:
1) 分布式電源未投切時,系統(tǒng)電源指向用戶端的方向為正方向;
2) 存在分布式電源投切時,規(guī)定正方向為系統(tǒng)電源指向投切部位。
此兩種情況在原理上不相矛盾,對任何故障進(jìn)行定位時此方向均應(yīng)不變,保證定位效率。
需要對開關(guān)函數(shù)進(jìn)行改進(jìn)以適應(yīng)分布式電源投切的影響,所以對文獻(xiàn)[5]中的開關(guān)函數(shù)進(jìn)行改進(jìn)如下所示:
(13)

利用改進(jìn)開關(guān)函數(shù)的特點,在編程時先對參數(shù)k1,k2進(jìn)行運(yùn)算,則式(13)化簡為式(14),如公式所示,利用函數(shù)本身的特性即可在很大程度上減少計算量,提高定位的效率:
(14)
2.2 評價函數(shù)
評價函數(shù)決定著蟻群粒子群混合算法能否取得最優(yōu)解和能否將故障區(qū)斷定位正確。針對故障區(qū)段定位的特點,采用文獻(xiàn)[1]中的評價函數(shù)如下:
(15)
其中,W為開關(guān)總數(shù)量,B為饋線區(qū)段的總數(shù)量,xi為區(qū)段i的狀態(tài)值。Ij為開關(guān)j處FTU上傳的測控點的實際狀態(tài)信息如式(16)所示:
(16)
將式(13)和式(16)代入式(15),便完成了對評價函數(shù)的構(gòu)建。
應(yīng)用評價函數(shù),依據(jù)各測控點實際狀態(tài)值和假設(shè)故障情況下的狀態(tài)值對所有路徑進(jìn)行評價,螞蟻選擇評價值最小的路徑。由此,便將含分布式電源配電網(wǎng)的區(qū)段定位問題轉(zhuǎn)化為求評價函數(shù)最小值的問題,根據(jù)文獻(xiàn)[16]可知,為了減小不可判斷故障對定位結(jié)果的影響,將次優(yōu)解作為參考值以提高定位結(jié)果的正確率。
3 實驗仿真
以圖1為例進(jìn)行仿真分析。如圖所示,DG1、DG2、DG3位于分別表示三個分布式電源,其是否投切由K1、K2、K3這三個分布式電源接入網(wǎng)絡(luò)的開關(guān)的狀態(tài)值表示,數(shù)值為1表示對應(yīng)分布式電源接入配電網(wǎng),數(shù)值為0時情況相反,S為系統(tǒng)電源。用黑色實心圓點表示斷路器和分段開關(guān)(不進(jìn)行區(qū)分),編號為1~30。兩實心圓點之間的線段表示饋線區(qū)段,編號為(1)~(30)。

圖1 仿真實驗配電網(wǎng)圖
為了檢測基于蟻群粒子群混合優(yōu)化算法在分布式發(fā)電配電網(wǎng)故障定位方面的性能,使用Matlab軟件對改進(jìn)算法仿真。算法的初始參數(shù)如下: 蟻群數(shù)量m=6,群迭代次數(shù)為35次;粒子群最大迭代次數(shù)為100,規(guī)模為40,加速因子c1=c2=2,慣性權(quán)重ω=0.5。
由表1得知,蟻群粒子群混合優(yōu)化算法進(jìn)行配電網(wǎng)故障定位輸出的結(jié)果與實際情況一致,表明該算法對單點故障和復(fù)雜故障均能準(zhǔn)確定位。當(dāng)上傳的信息出現(xiàn)畸變時,定位結(jié)果依然正確并且能夠得到對應(yīng)的畸變位置,這表明其定位準(zhǔn)確、容錯能力強(qiáng),可以對導(dǎo)致出現(xiàn)畸變信息的FTU進(jìn)行定位,以便于對FTU進(jìn)行修理或替換,從源頭上消除引發(fā)畸變的原因。
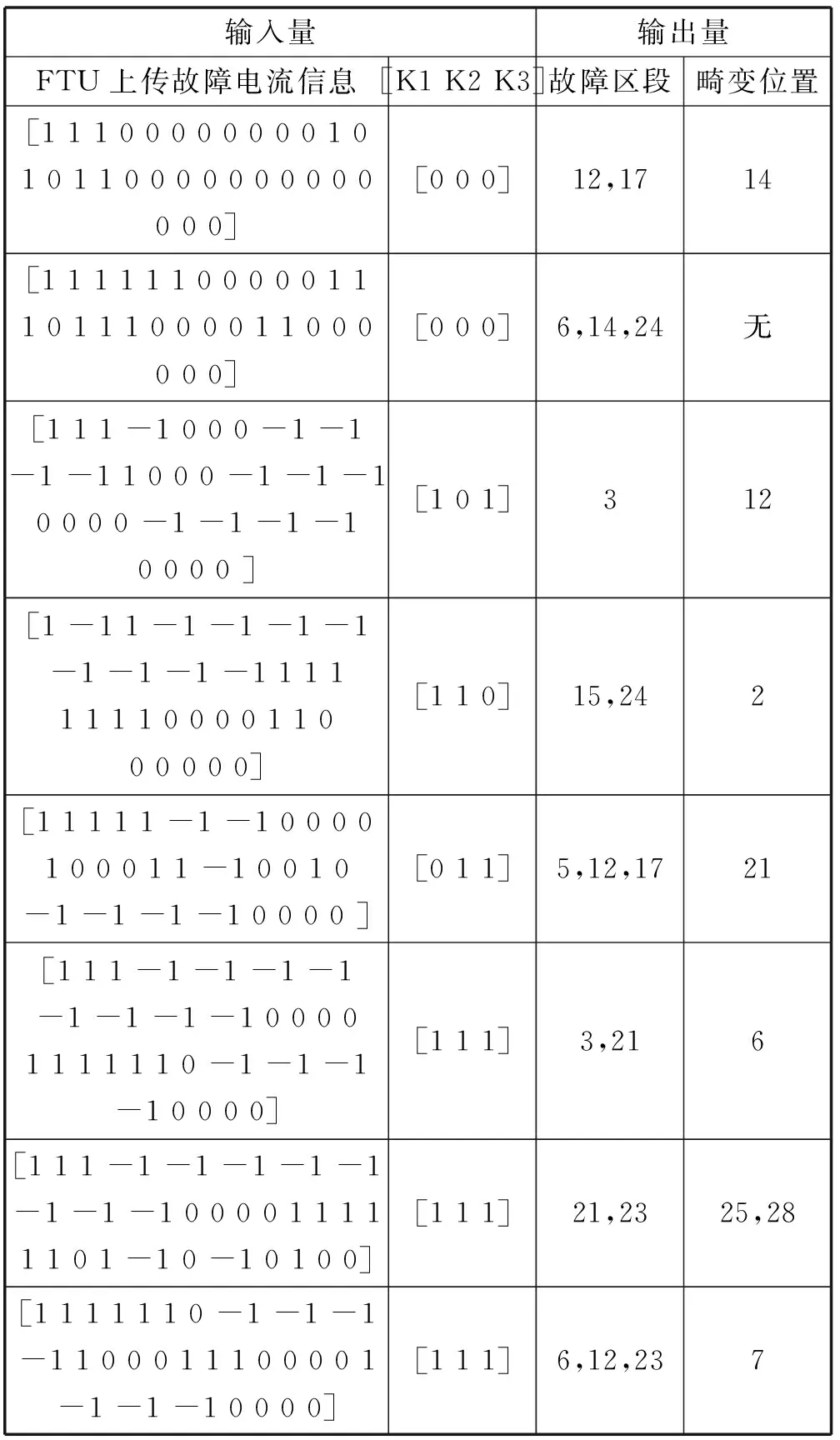
表1 仿真實驗結(jié)果
為了驗證所提出蟻群粒子群混合算法的優(yōu)越性,選取表1中的2、4、6三種故障情況,針對同一種故障情況分別利用三種蟻群粒子群優(yōu)化算法與文中改進(jìn)算法的作對比。算法1為文獻(xiàn)[9]中的算法,算法2為文獻(xiàn)[14]中的一種方法(蟻群被調(diào)用一次進(jìn)迭代X步,固定ρ,采用粒子群算法優(yōu)化α、β,調(diào)用一次蟻群算法對粒子所處位置的優(yōu)劣判斷一次,調(diào)用結(jié)束后,信息素重新初始化)。算法3為文獻(xiàn)[15]中的一種算法(采用粒子群算法優(yōu)化α、β、ρ,調(diào)用一次蟻群算法對粒子所處位置的優(yōu)劣判斷一次,調(diào)用結(jié)束后,信息素重新初始化)。為了減小改進(jìn)算法求解的隨機(jī)性,重復(fù)試驗60次,算法比較結(jié)果如表2所示。

表2 不同算法實驗結(jié)果比較
分析表2可見,改進(jìn)算法陷入局部最優(yōu)的次數(shù)遠(yuǎn)低于前三種方法,且運(yùn)行時間約在前三種方法的30%~80%之間。由此得出,改進(jìn)算法在成功降低了人工智能算法容易陷入“早熟收斂”概率的前提下,可以實現(xiàn)對含有分布式電源的配電網(wǎng)的快速準(zhǔn)確故障定位。
4 結(jié) 語
目前,將蟻群算法應(yīng)用于分布式發(fā)電配電網(wǎng)故障定位時,分布式電源的投切和算法自身缺點使其變得不再適用,為此,提出了一種新方法:
1) 針對分布式電源投切引發(fā)的問題對故障定位模型進(jìn)行了一定改進(jìn),利用改進(jìn)的開關(guān)函數(shù)能夠減少運(yùn)算量,提高效率。利用改進(jìn)評價函數(shù)進(jìn)行對含分布式電源的配電網(wǎng)進(jìn)行定位時,仿真結(jié)果顯示定位結(jié)果準(zhǔn)確,可以動態(tài)適應(yīng)分布式電源的投切,且只需要設(shè)定一次正方向。
2) 針對蟻群算法收斂效率較低和容易陷入局部最優(yōu)的缺點,采用混合啟發(fā)因子“α-β”降低了粒子群算法參數(shù)的維數(shù),減少工作量。選擇全局異步與精英策略相結(jié)合的信息素更新方式與其匹配,保障蟻群算法最終搜尋出最優(yōu)參數(shù),經(jīng)驗證,兩者配合效果良好。
[1] 張穎,周韌,鐘凱.改進(jìn)蟻群算法在復(fù)雜配電網(wǎng)故障區(qū)段定位中的應(yīng)用[J].電網(wǎng)技術(shù),2011,35(1):224-228.
[2] 秦立軍,楊萬濤.蟻群算法在配電網(wǎng)故障定位中的應(yīng)用及其優(yōu)化[J].電氣應(yīng)用,2015,34(22):73-76.
[3] 王進(jìn)強(qiáng),陳少華.基于改進(jìn)遺傳算法的含分布式電源的配電網(wǎng)故障定位[J].電力科學(xué)與工程,2013,2(12):13-17.
[4] 嚴(yán)太山,崔杜武,陶永芹.基于改進(jìn)遺傳算法的配電網(wǎng)故障定位[J].高電壓技術(shù),2009,35(2):255-259.
[5] 楊繼革.基于遺傳算法的配電網(wǎng)故障定位的研究[D].杭州:浙江大學(xué),2004.
[6] 劉蓓,汪沨,陳春,等.和聲算法在含DG配電網(wǎng)故障定位中的應(yīng)用[J].電工技術(shù)學(xué)報,2013,28(5):280-286.
[7] 高云龍,周羽生,彭湃,等.優(yōu)化和聲算法在含DG配電網(wǎng)故障定位中的應(yīng)用[J].電力系統(tǒng)保護(hù)與控制,2014,42(19):26-31.
[8] 張超,李擎,陳鵬,等.一種基于粒子群參數(shù)優(yōu)化的改進(jìn)蟻群算法及其應(yīng)用[J].北京科技大學(xué)學(xué)報,2013,35(7):955-960.
[9] 李擎,張超,陳鵬,等.一種基于粒子群參數(shù)優(yōu)化的改進(jìn)蟻群算法[J].控制與決策,2013,28(6):873-878.
[10] 劉健,張小慶,同向前,等.含分布式電源配電網(wǎng)故障定位[J].電力系統(tǒng)自動化,2013,37(2):36-34.
[11] 袁超,曾祥君,鄧豐,等.應(yīng)用邊界保護(hù)原理提高分布式發(fā)電系統(tǒng)并網(wǎng)協(xié)調(diào)性的方法[J].電網(wǎng)技術(shù),2009,33(5):62-68.
[12] 康龍云,郭紅霞,吳捷,等.分布式電源及其接入電力系統(tǒng)時若干研究課題綜述[J].電網(wǎng)技術(shù),2010,34(11):43-47.
[13] 王進(jìn)強(qiáng).含分布式電源的配電網(wǎng)故障定位的應(yīng)用研究[D].廣州:廣東工業(yè)大學(xué),2011.
[14] 閔克學(xué),葛宏偉,張毅,等.基于蟻群和粒子群優(yōu)化的混合算法求解TSP問題[J].吉林大學(xué)學(xué)報(信息科學(xué)版),2006,24(4):402-405.
[15] 夏輝,王華,陳熙.一種基于微粒群思想的蟻群參數(shù)自適應(yīng)優(yōu)化算法[J].山東大學(xué)學(xué)報(工學(xué)版),2010,40(3):26-30.
[16] 易禮宏.基于蟻群算法的配電網(wǎng)故障定位研究[D].南寧:廣西大學(xué),2008.
NEWAPPROACHOFFAULTSECTIONLOCATIONINPOWERDISTRIBUTIONNETWORKWITHDISTRIBUTEDGENERATION
Guo Yuwen
(FacultyofElectricalandControlEngineering,LiaoningTechnicalUniversity,Huludao125105,Liaoning,China)
Aiming at the problem that the traditional fault section locating method is no longer applicable to the distributed generation, a new switch function is proposed to dynamically adapt the switching of multiple distributed powers. The characteristics of the switching function can be simplified and improve its positioning efficiency. Meanwhile, a hybrid optimization algorithm was introduced to solve the problem about premature convergence of ant colony algorithm. In addition, a fault location method based on hybrid optimization algorithm was put forward for fault-section location of the power distribution network containing distributed power. The particle swarm optimization algorithm was used to optimize the parameters of the ant colony algorithm. Also, the method of pheromone update with the combination of global asynchronous and elitist strategy and the method of reducing particle dimension were adopted to reduce the probability of local optima. Consequently, the convergence speed and the accuracy of localization results were improved. A typical example was used to simulate the power distribution network with distributed generation. The results show that the algorithm is capable of accurate positioning not only a single fault but also multiple faults with less time consuming as well as higher fault tolerance.
Distributed power Power distribution network Hybrid optimization algorithm Switching function
TP29
A
10.3969/j.issn.1000-386x.2017.09.004
2017-01-23。遼寧省重點實驗室項目(LJZS003)。郭玉雯,碩士生,主研領(lǐng)域:電氣工程。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
經(jīng)濟(jì)技術(shù)協(xié)作信息(2018年32期)2018-11-30 01:43:16
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
電測與儀表(2016年5期)2016-04-22 01:14:14
河南電力(2016年5期)2016-02-06 02:11:24
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50